
Abstract
In order to solve the problem of poor accuracy of traditional microcontroller attachment stability testing method, a microcontroller attachment stability testing method based on biosensor was designed to solve the existing problems. The reliability test index of the microcontroller is established, then the interference of the microcontroller accessory is detected and responded, and the interference detection signal of the microcontroller accessory is selected. The process design of stability detection of microcontroller accessories based on biosensor is completed. The experimental results show that the stability detection method based on biosensor designed in this paper can ensure the stability detection accuracy of microcontroller accessories above 80%, which is more accurate than traditional methods. It can be used to evaluate the stability, reliability and performance of microcontroller accessories in long-term operation.
Introduction
With the development of integrated circuit, the function of microcontroller is more and more powerful. Due to its excellent cost performance, Mcu has been widely and deeply applied in many fields such as industrial automation, intelligent instruments, medical devices, etc., which effectively improves the production efficiency and economic benefits [1]. However, after debugging the Mcu system and putting it into the application site, there are often some problems, the system becomes unreliable and cannot work normally. The reason for this situation is mainly due to the complex field environment and various interferences. These interferences invade the computer, which greatly reduces the reliability and stability of Mcu control [2]. In serious cases, the whole measurement and control system will run abnormally or even be paralyzed. Reliability is the life of industrial production, how to enhance the anti-interference ability of microcontrol system economically and effectively, and how to improve the reliability and stability of system operation is always an important research topic in Mcu application.
In the electronic computer technology, automatic control technology, modern mechanical design and manufacturing technology, signal processing and mode setting technology are inseparable from the application of microcontroller. As the main control chip of control system, microcontroller provides technical support and guarantee for digital, automatic and intelligent detection of ultrasonic testing technology. Therefore, the stability of microcontroller is particularly important in practical work. At present, the research methods for the stability detection of microcontroller accessories are mainly verified by building a large-scale network or simulating a large-scale network. This detection method not only consumes a lot of time, but also has a low accuracy. Some researchers have proposed the use of manual ultrasonic testing method, although the current solution to the stability of the microcontroller accessories detection, but can not meet the needs of detection time and accuracy [3]. Some scholars put forward the vehicle photoelectric tracking system of single chip microcomputer, which can not only adapt to a large number of public parts, but also meet the requirements of automatic ultrasonic detection control technology and system of different types and models of machine tools. But it is easy to be disturbed and the test accuracy is not enough [4].
In order to solve the problems existing in the existing methods, this paper proposes a method to detect the stability of micro controller accessories based on biosensor from the interference principle and interference mode. The biological signal captured by biosensor is converted into electrical signal to collect interference data, select the best interference factor signal to detect the stability of micro controller accessories, and monitor the whole operation process. Finally, through the comparative experiments with the traditional methods, to verify the practicability of the design method.
The experimental results show that the method in this paper has a good effect on the detection accuracy, and can be widely used in the stability detection of microcontroller accessories, which is of great significance to the use of microcontroller.
Design of stability test method for microcontroller accessories based on biosensor
Principle of biosensor
Biosensor is an instrument that is sensitive to biological substances and converts their concentration into electrical signals for detection. The biosensor consists of a molecular recognition part (sensing element) and a conversion part (sensor). Molecular recognition is the main functional element that may cause some physical or chemical changes. The molecular recognition part is the basis of the selective measurement of biosensors. It is a physical or chemical sensor (sensor) that converts the signal expressed by biological activity into electrical signal. All kinds of biosensors have the following common structures: including one or several related bioactive materials (biofilms) and physical or chemical sensors (sensors) that convert signals. The combination of these two technologies can reprocess the biological signal with modern microelectronic technology and automatic instrument technology, and form a variety of available biosensor analysis devices, instruments and systems.
Biosensors can achieve the following three functions. Sensing: extraction of animal and plant biomaterials, including biological tissues, microorganisms, organelles, enzymes, antibodies, antigens, nucleic acids, DNA, etc. It can realize the mass production and reuse of biomaterials or similar biomaterials, and reduce the difficulty and cost of detection; Observation: transforming the continuous and regular information felt by biomaterials into information that people can understand; Reaction: through the light, piezoelectric, electrochemical, temperature, electromagnetic and other ways to show people information, to provide the basis for people’s decision-making.
Establishment of reliability test indicator of microcontroller
The performance indicators given in Table 1 are related to resource management, connection control, path calculation and protection recovery of the microcontroller. In addition, the indicator of long-term operation stability of the controller is also proposed, which is mainly to investigate the long-term operation stability and reliability of the controller.
Reliability test indicator
Reliability test indicator
The above indicators are used to measure the stability of the controller in the long-term operation.
The detection method of this design mainly uses interference factors to detect the accessories of the microcontroller. After the interference enters the microcontroller, the microcontroller enters a waiting state until the interference is eliminated and it returns to normal operation, i.e. avoiding the interference state. Its basic working principle is shown in Fig. 1.
Operation principle of interference detection and elimination.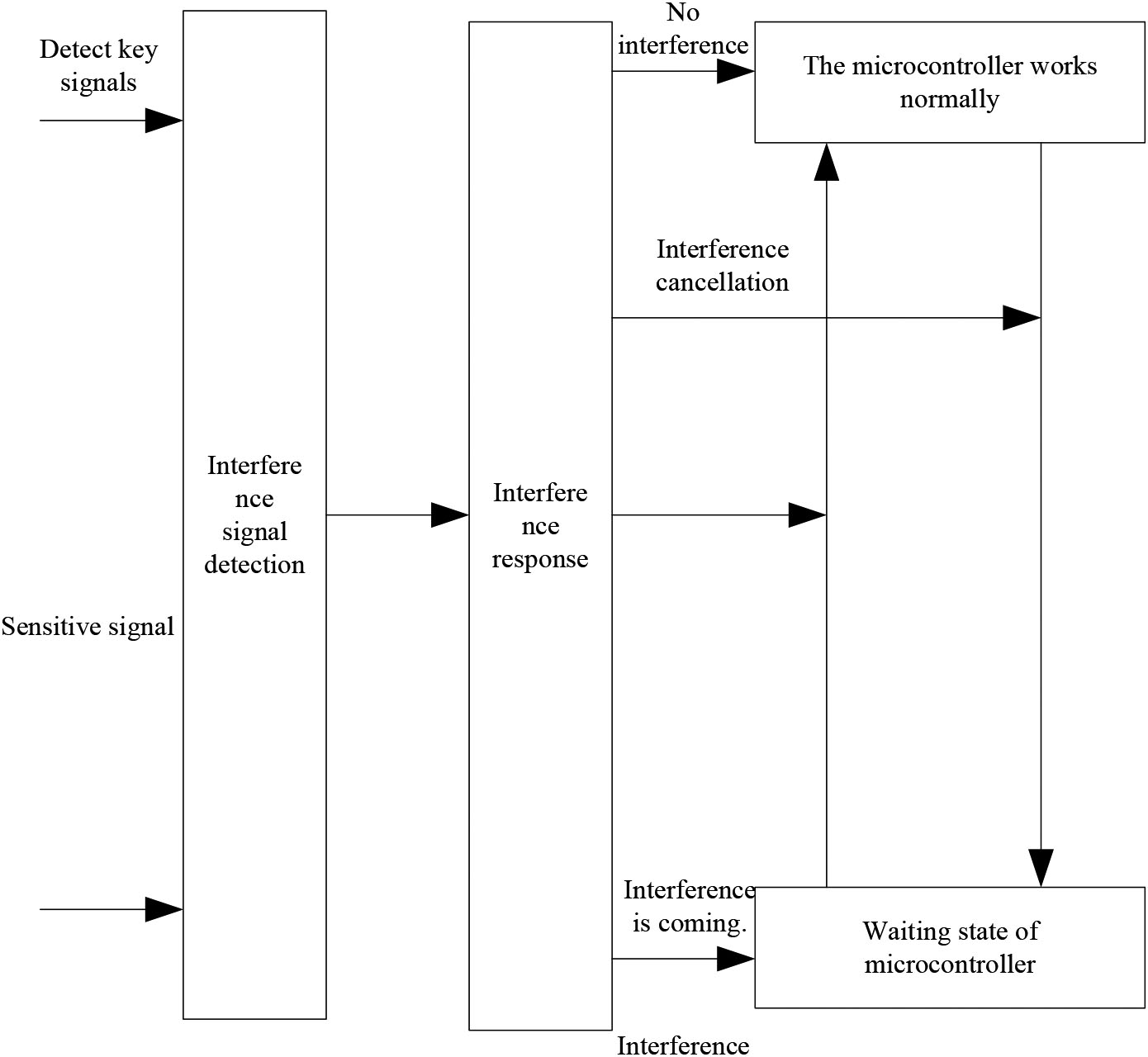
Data sampling process.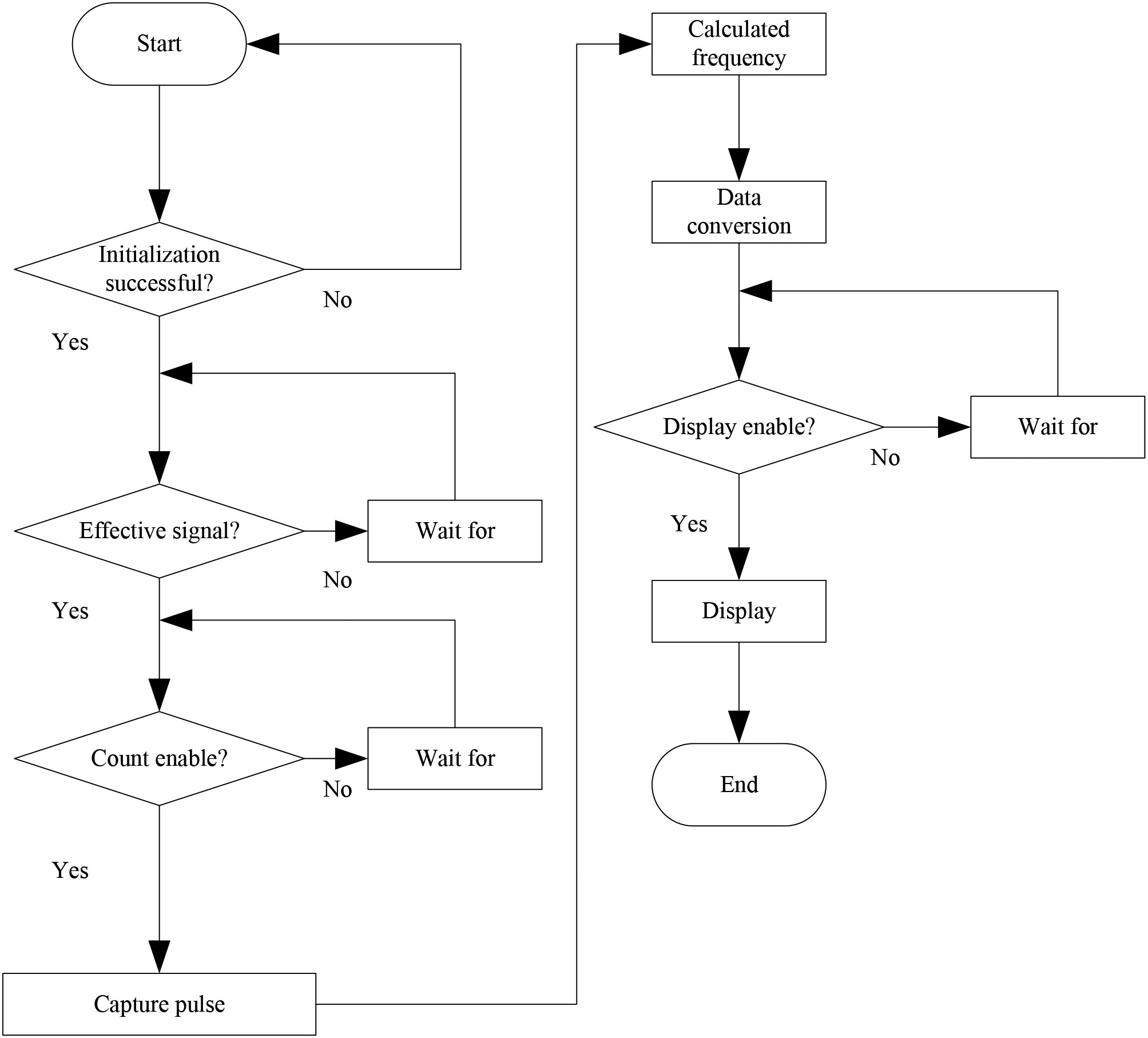
In the process of collecting interference data, there are many characteristics of microcontroller control, such as large amount of detection data, large amount of information collection, high requirements of test accuracy, both real-time data processing and result output, as well as post analysis and processing. Therefore, the Kalman filtering algorithm of recursive linear minimum variance estimation method is used to convert and calculate the reference signals provided by the microcontroller accessories, and record these data in the form of files. In order to realize the frequency measurement, the acquisition function of timing/counter is used. The frequency is captured twice, the time difference of rising edge is a complete cycle of the frequency to be measured, and this frequency difference is the result of multiplying the difference of two rising edge counts and the clock cycle. The overall process is shown in Fig. 2.
One of the important links in data sampling is to capture data. The capture process is: set the load value and capture edge type; After the counter is enabled, it will start to run automatically, count down from the load value, reload the initial value after counting to 0, and continue counting; If there is an effective input pulse edge event on the CCP pin, the current count value will be automatically copied to one specific register GPTMTNR, the value remains unchanged until the next valid input edge is encountered. The specific capture process is shown in Fig. 3.
Data capture process.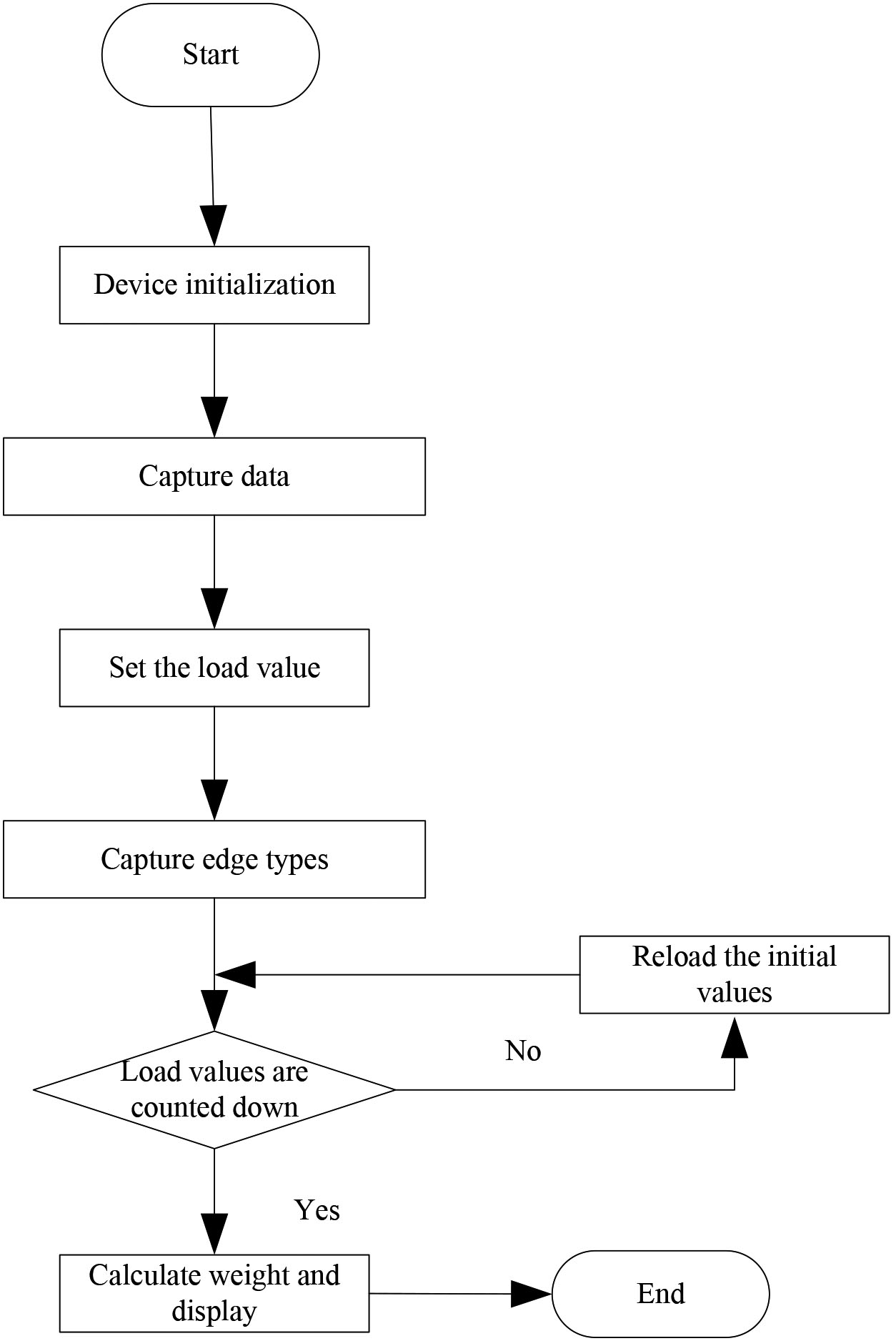
Example of 16 bit input edge timing capture mode.
In order to read the captured count value in time, the edge event should be enabled to capture the interrupt and read the value in the interrupt service program [5, 6, 7]. As shown in the Fig. 4, the whole decreasing or increasing process is continuously in operation.
The effective algorithm of frequency and weight needs to be calibrated according to the frequency relationship between weight and output [8]. In the process of data conversion, the self-fitting formula is applied, as follows:
In Eq. (1),
Critical signals in the system can also be considered. After critical signals are interfered with and go wrong, the microcontroller waits for them to return to normal before resuming work. In this way, the efficiency of the microcontroller is relatively improved, that is, the microcontroller will respond only after the critical signal of the microcontroller is interfered with and error occurs [9, 10, 11, 12]. However, this design does not guarantee that other signals will be positive if the interference works properly. Therefore, in the actual selection of detection signals, the above two factors need to be weighed to choose the best detection signal according to the actual needs.
Interference detection of microcontroller accessories
The design of this step requires to be able to realize the whole monitoring, such as the monitoring of the whole normal working process, or the monitoring of the whole reset process. It must be able to judge and process the detection signal continuously, and output a stable signal to tell the state of the microcontroller detected by the next level response device. At the same time, the output signal of the detection module is judged, and the corresponding control signal can be output to realize the switch between the normal mode and the waiting mode of the microcontroller [13]. This module also needs to be able to work in the whole process, constantly refreshing the previous detection signals to determine the current state of the microcontroller. Based on the analysis of the waiting state of the microcontroller, the definition of the waiting state of the system can be very wide, such as clock stop, system sleep, insertion waiting time, reset, etc., which can be selected through actual needs in the use process, and should work normally under the waiting state and the switching condition of the system state.
The main idea of interference detection and response is to monitor the reset process [14, 15, 16]. If it is inconsistent with the expectation, it is reset again until it is consistent with the expectation, and then the reset is completed. The system starts to enter the reset process after receiving the reset signal. The whole process is mainly the counting process of the system reset and preheating counter. During the counting process, three counting points will be selected to complete respectively:
ROM reset – ROMRST; Read in of system configuration word 0PTl (read from specific area in ROM, corresponding address is 1-OPTl-VIt; Read in of system configuration word OPT2 (read from specific area in ROM, corresponding address is 2-OPT2-wR.
After counting to a certain value, the system will end the whole reset. The whole process is shown in Fig. 5.
Schematic diagram of system reset process.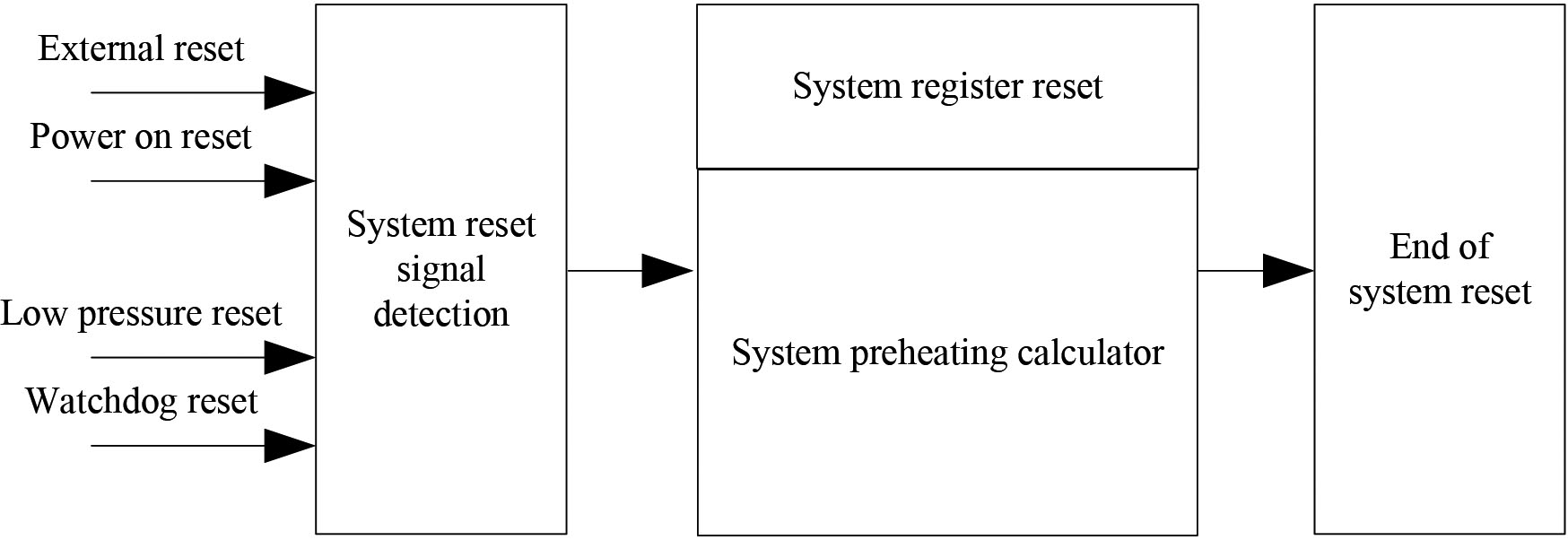
According to the characteristics of this reset structure, the interference detection and response mechanism can be carried out according to the following ideas: select the key signals in the system – the reset process in this design mainly involves the writing of two system configuration words. Imagining that if there is an error in the writing of system configuration words in the whole reset process, the whole reset process is unreliable. If the content of the configuration word can be detected, it can effectively determine whether the reset process is reliable, that is, whether the configuration word is written correctly [17]. The most direct method is to set the detection bit in the configuration word as interference detection signal. If it is the same as the preset value, the reset process is effective. Otherwise, the reset process is not reliable. The design of interference detection module mainly includes:
Timing of detection: since the content of detection is the detection bit in the system configuration word, the timing of detection must be SYS–DEC after the system configuration word is written; Update the test results and adjust the current output results after the response device functions.
The response design can reuse the reset signal detection device, and can improve the detection accuracy. That is, if the system reset is not reliable, reset again until the reliable reset. In fact, as long as the improvement, the reset control function of the detection result signal can be increased, and the detection accuracy is improved, so that the detection results are accurate and reliable.
By using biosensor, the process of automatically creating business and instrument sending flow to verify whether the business is successful or not and deleting business can be realized. By repeating the process, the stability and reliability of the microcontroller in the long-term operation can be verified. By comparing and analyzing the success rate and failure rate of business creation in the long-term operation, different microcontroller accessories can be transported. The stability and reliability of the line are evaluated synthetically. The biosensor sends business creation and deletion requests to the multi-domain cooperative controller through the north interface, and sends traffic initiation and termination requests to the instrument control agent through the rest API. Through telnet and command-line interface, the stability detection scheme of microcontroller accessories based on biosensor is shown in Fig. 6.
Automatic detection scheme for the stability of microcontroller accessories based on biosensor.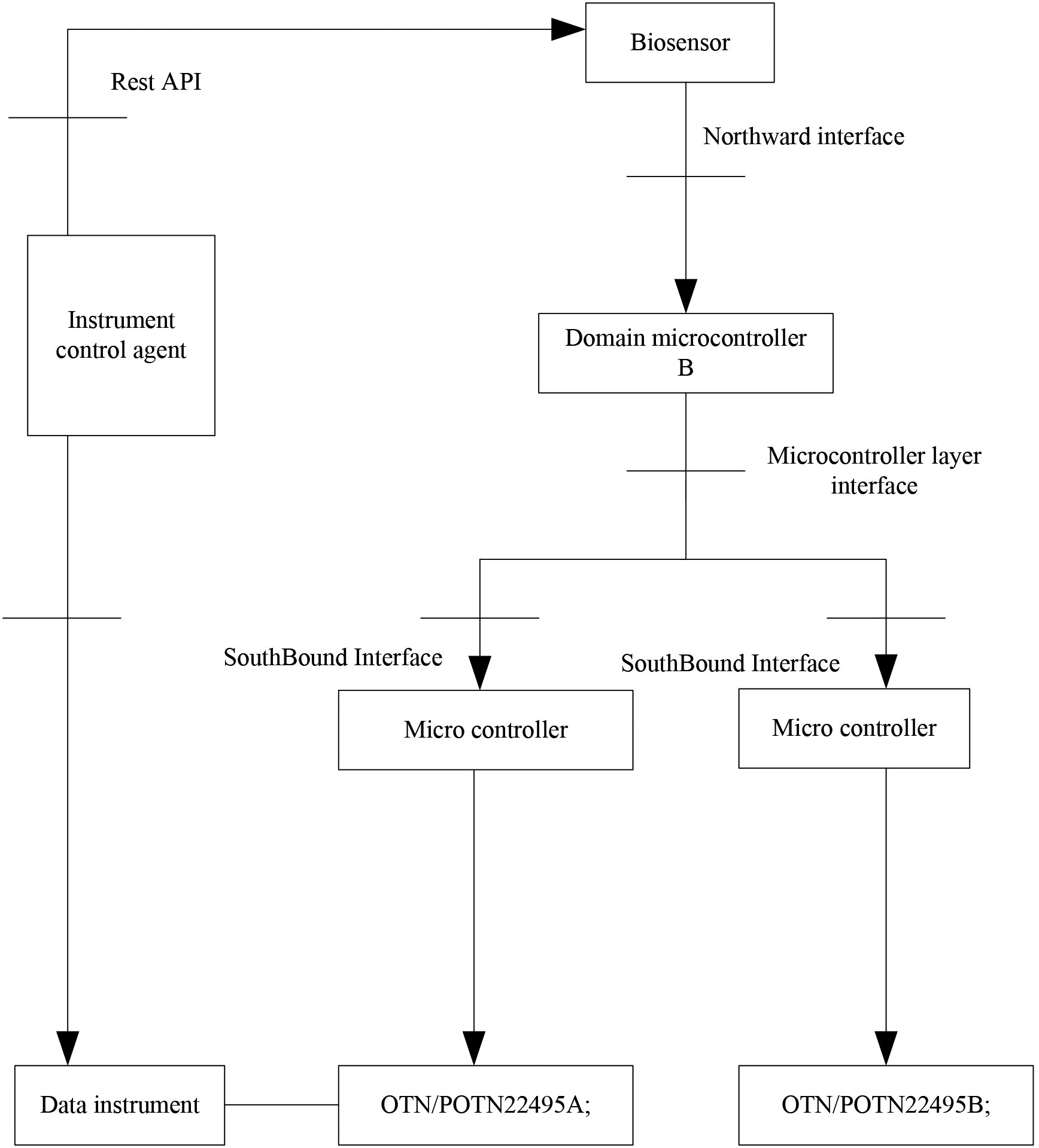
During the long-term operation of the microcontroller, it can initiate the connection establishment and deletion of a single service, or multiple services. The flow of initiating a single service to verify the long-term operation reliability of the controller is shown in Fig. 7.
Automatic test process of long-term operation reliability of controller.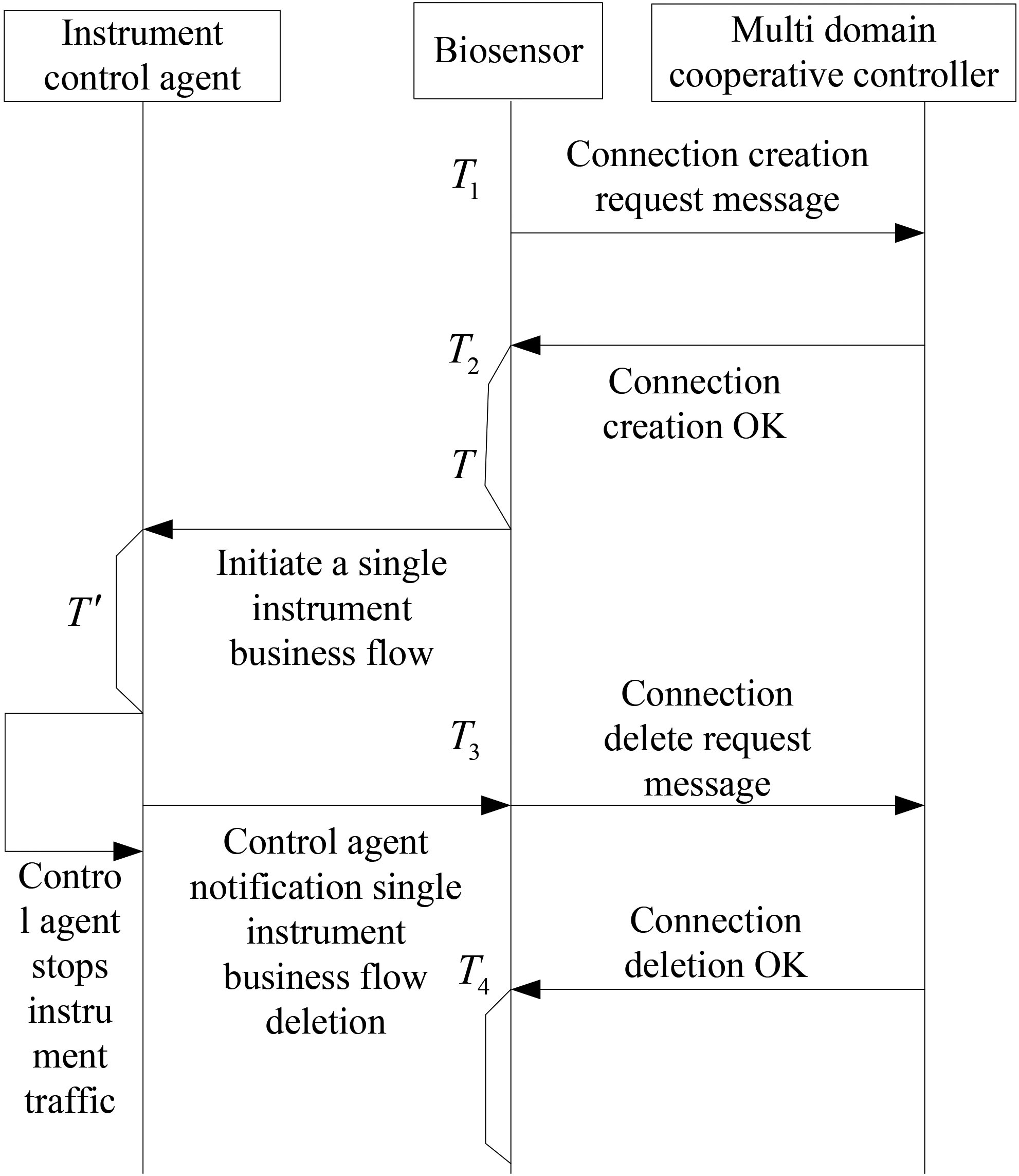
After waiting time, the biosensor sends the termination process request to the instrument control agent, and at the same time sends the connection deletion request to the multi domain controller. After waiting time, the next business creation, instrument sending process verification and deletion business process are started. The number of repetitions was 9.
It can be seen from the test process that after the interaction of the message process of the biosensor and the collaborative controller is completed, it needs to wait for a time
Waiting time value method of reliability test.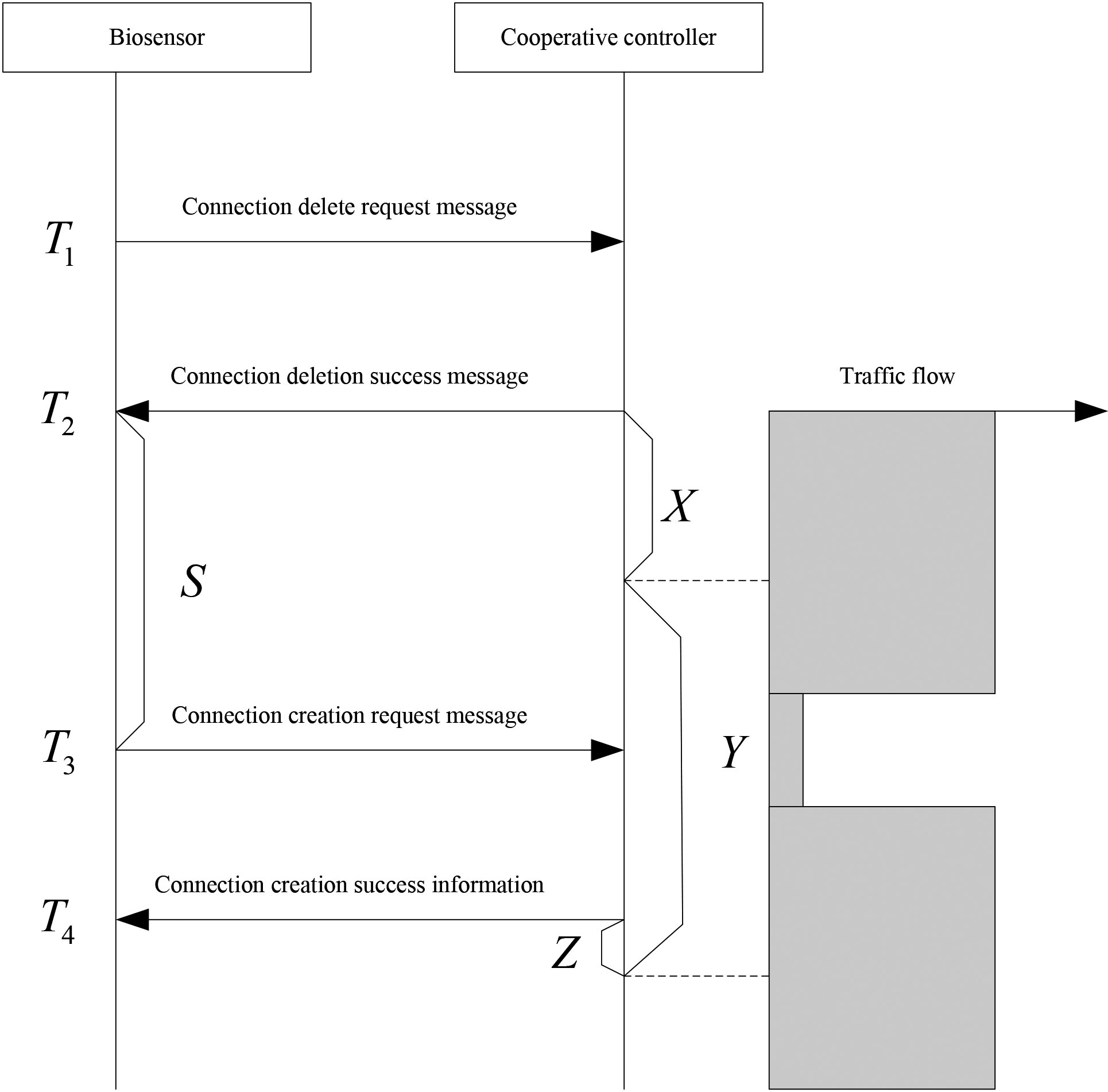
In Fig. 8, the meaning of each time is as follows:
We can conclude that after the creation of the message process, the underlying network device needs to wait for
In Eq. (2),
According to the above definition, the stability of the microcontroller accessories based on biosensor is tested. In order to ensure the effectiveness of this method, the next experiment will be carried out.
In order to verify the validity of the stability detection method of the microcontroller accessories based on biosensor designed above, experiments are carried out, and the traditional detection method is compared with the detection method designed in this paper, and the accuracy of the two detection methods is compared. The experiment is carried out in a factory. 10 microcontrollers are randomly selected from the factory. The traditional method and the design method are used to test the microcontrollers. A total of 5 experiments are carried out.
Experimental platform
The test server selected for the experiment is Intel PentiumIIIx4, 4 GB processor memory, Redhat Linux operating system, and Crypto API library functions as calculation functions. The specific experimental platform is shown in Fig. 9.
Experimental platform.
The database mainly stores the experimental data. Using Crypto API library function to calculate can reduce the cost. Using 128 bit key can ensure that the performance test of the two methods is not affected by the cost and the accuracy of the experimental results.
Using this method in the experimental platform and the traditional method for comparison, five parallel experiments were carried out, according to the stability of the microcontroller test results, the detection accuracy and running time of the two methods were compared. The specific experimental results are shown in Figs 10 and 11.
Accuracy comparison results.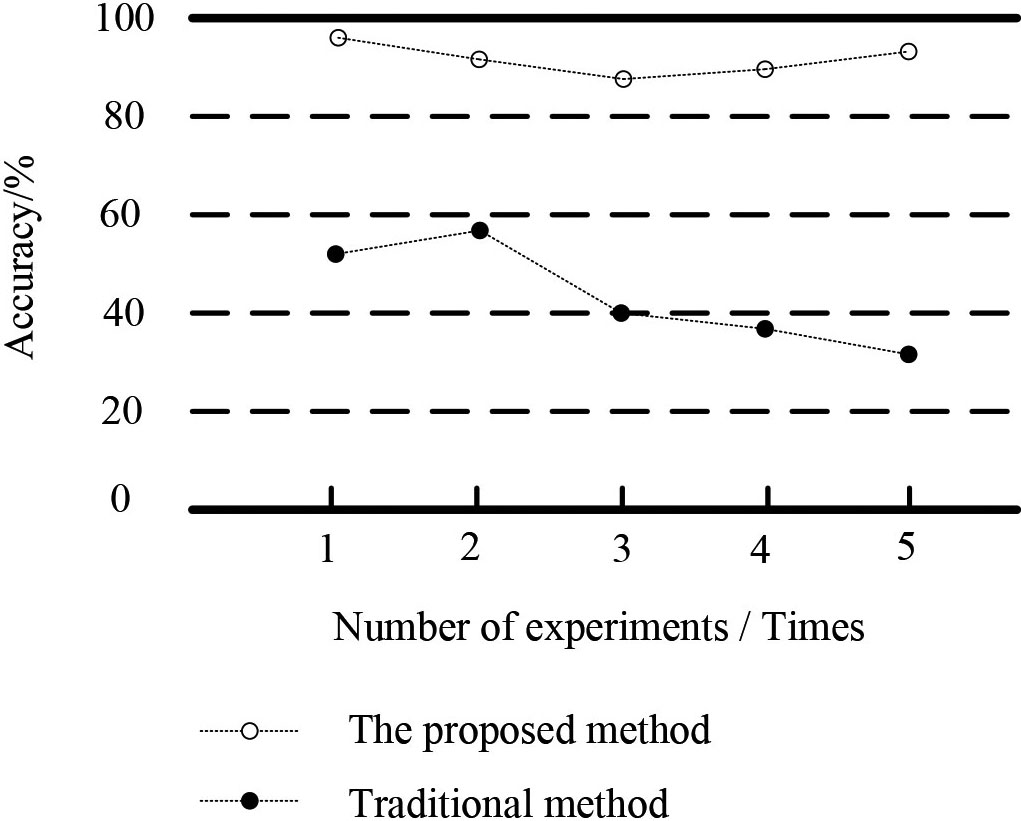
Comparison of running time.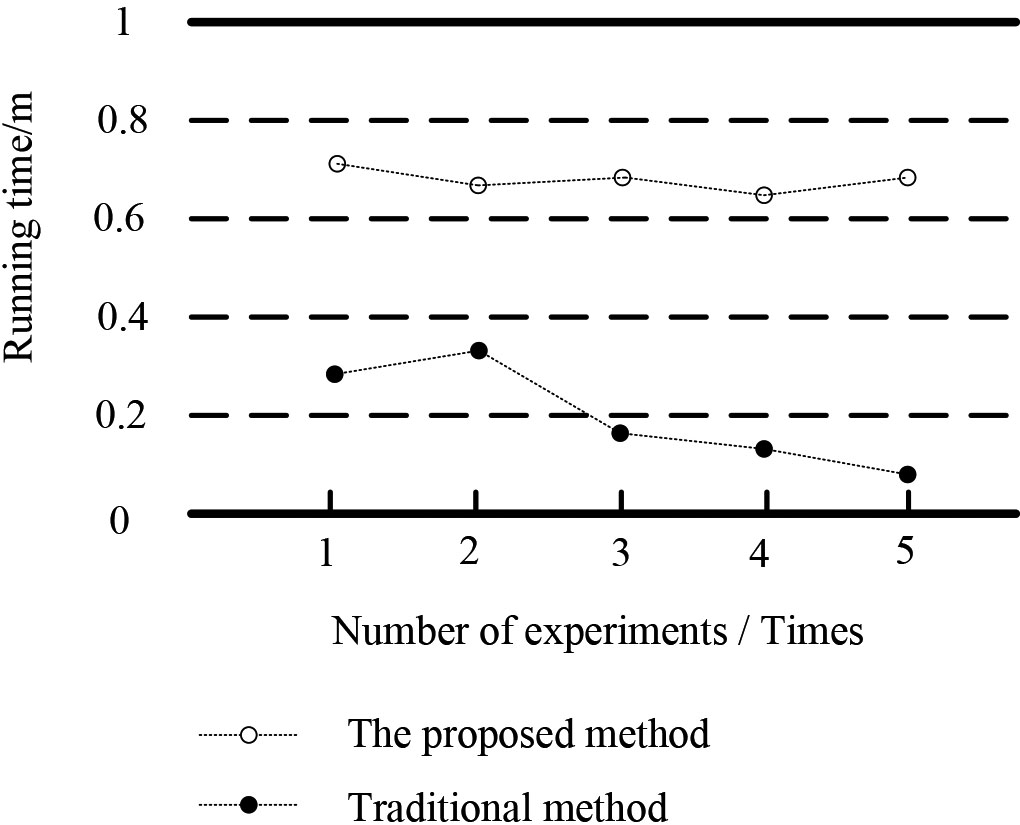
As can be seen from Fig. 10, in the five parallel experiments, the accuracy of the traditional method to detect the stability of the microcontroller is between 30%–60%, and the highest accuracy is 60%; However, the accuracy of this design method to detect the stability of microcontroller is always above 80%, and the highest accuracy can reach 98%.
It can be seen from Fig. 11 that the running time of the traditional method is between 0.6–0.7/m, and the maximum running time of this method is not more than 0.36/m, which is far lower than that of the traditional method. It can be proved that this method has high efficiency in the detection time of microcontroller.
Therefore, the stability detection method based on biosensor designed in this paper has higher accuracy, shorter detection time, better practical effect and better performance for the stability detection of microcontroller accessories.
In the era of rapid development of industrial technology, the application of microcontroller is more and more widely. In this paper, a stability detection method of microcontroller accessories based on biosensor is proposed to solve the problem of insufficient accuracy of existing methods in the stability test of microcontroller. By analyzing the interference principle and interference mode, the stability test index of microcontroller is established to detect the response of microcontroller accessories after interference and select the optimal interference detection signal. It can effectively detect the stability of microcontroller accessories.
Through the experimental test, using this method to detect the stability of the microcontroller accessories, the accuracy of the test results is more than 80%, the precision is higher, the detection time is shorter, which can meet the needs of the stability detection of the microcontroller accessories.
However, due to time constraints, this paper only analyzes and studies the interference principle and interference mode of the microcontroller accessories. In order to make the microcontroller accessories better applied in electronic control technology, how to improve the stability of the microcontroller should be studied. At the same time, the design of this method is relatively complete, which can try to test the stability of other electronic controllers.
Footnotes
Acknowledgments
The research is supported by: 2021 Key scientific research projects of colleges and universities in Henan Province, Project No.: 21B460002, Project name: Research on path planning of industrial robot polishing and grinding based on visual perception; 2020 key project of research and practice of school level education and teaching reform (employment, innovation and Entrepreneurship), Project No.: 202001, Project name: Research on innovation and Entrepreneurship Education Path of Engineering Laboratory service in our university in the new era – Taking mechatronics specialty as an example; 2021 school level young backbone teacher training plan, Project No.: 202102, Project name: Research on polishing system of industrial robot based on visual perception; 2020 Development project of Jiangsu Key Laboratory of Advanced Robotics, Project No.: KJS2026, Project name: Research on Key Technologies of industrial robot polishing system based on visual perception.