
Abstract
The current speed control methods of mineral hoisting and conveying machinery ignore the fuzzy steps of the PID control model, and the AC commutation effect of mineral hoisting and conveying machinery is poor, resulting in long delay and low accuracy of speed control. To this end, a speed control method for lifting and transporting machinery based on single neuron PID is proposed. The structure of a single neural adaptive PID speed controller is designed. A learning algorithm is introduced to optimize the AC commutation effect of the hoisting and conveying mechanical circuit. A single neuron PID controller is used to fuzzy process the input signal to form a fuzzy language set. The speed controller port is defined, and the single neuron PID control rule is designed. Using the reduction ratio of the three-phase motor speed governor, the maximum speed required for conveying minerals is calculated, and the speed control of the mineral hoisting and transporting machinery is realized. The experimental results show that the mineral lifting deviation is small, the speed regulation time is less than 4 s, the average control delay is 200 ms, and the maximum speed regulation accuracy is 99.9%. The method in this paper has certain application value and is worthy of promotion.
Introduction
In order to ensure the safe and efficient operation of the coal mine, it is not only necessary to formulate in advance the environmental and geological conditions, construction operation technology, construction scheme, etc. of the construction site of the coal mine, but also need to select appropriate mine hoisting and transportation equipment according to the actual operation conditions, and transmit the obtained mineral resources to the cities so as to maintain the normal operation of all aspects of the city [1]. Mine hoisting and transporting equipment is a part of mine track transportation system. Once the speed of mine hoisting and transporting machinery is too fast, it will lead to vibration problem of hoisting machinery, not only the internal structure of equipment will be impacted, but also will lead to production accidents and endanger the personal safety of construction workers. However, the slow speed of the hoisting machine will also have a negative impact on the mine production progress [2]. Therefore, in order to enhance the stability and efficiency of mine hoisting and transportation process, the control method of mine hoisting and transportation speed should be further studied.
A series model sensorless vector control scheme based on stator current is proposed by Hu et al. [3], the traditional voltage model and current model are modified, the pure integral link and its adverse effects are eliminated, and the structure of the series model is changed. It is explained and its adaptive law is derived in detail. The full-order flux observer is used to estimate the stator flux, and it is used for the vector control under the flux orientation. Although this method studies a new vector control method, the speed control accuracy has not been greatly improved. Jia et al. [4] proposes a transfer function model from the speed drive signal of the servo motor to the strain vibration signal at the root of the rotating flexible manipulator, and determines the key parameters of the model through experiments. The experimental results show that under the pseudo-random signal and the frequency sweep excitation signal, the consistency between the prediction output of the identification model and the dynamic response of the actual structure is 78%, respectively, 8% and 89%. The correctness of the model and parameter identification results are verified, and the vibration characteristics of the flexible arm during the rotation process are mastered. Although this method improves its control accuracy, its robustness is insufficient and cannot be widely used. A fuzzy adaptive iterative learning control method for mechanical transportation with initial state learning is designed by Yi et al. [5]. In the control strategy, the initial state learning control law is introduced to relax the strict repetition of the initial state of the system. The Lyapunov function is used to analyze the convergence of the system, overcoming the constraints of the global Lipschitz continuity condition. At the same time, a fuzzy controller is designed to adjust the gain and parameters of the adaptive law. Finally, the algorithm is applied to mechanical transportation control. However, this method ignores the optimization of the AC commutation effect of the hoisting and transporting machinery circuit, resulting in a long delay and low speed control accuracy of the hoisting and transporting machinery.
Based on this, this paper proposes a speed control method for lifting and transporting machinery based on single neuron PID. Firstly, according to the structure of mining hoisting container, its motion state is studied, and the mechanical model of mining crane is established, and then PID technology is introduced to establish a single neuron PID control model. Establish a mechanical loop for lifting the conveying equipment and optimize it with a learning algorithm. Complete the design of single neuron PID control rules, use the reduction ratio of the three-phase motor governor to calculate the maximum speed required to transport minerals, and realize the speed control of lifting and transporting machinery. This paper mainly calculates the deviation e between the set mining speed and the actual mining speed, and then inputs the speed deviation e into the PID controller to calculate the maximum speed and kinetic energy of the crane, and control the rated torque of the normal load within the rated torque range of the motor. In order to ensure the maximum lifting and deceleration torque of minerals, and then realize the speed control of mineral lifting and conveying machinery. In this way, it is hoped to improve the control efficiency of heavy minerals and transport machinery to provide assistance for the new development of mining business.
Speed control method of mineral lifting and transportation machinery based on single neuron PID
Mechanical model of mineral crane
Figure 1 is a schematic diagram of the structure of the mining lifting container. As shown in Fig. 1, when the winch is in motion, the speed of the winch container reflects the actual speed of the system, so the vibration of the winch also reflects the stability of the system.
Schematic diagram of lifting container. Note: mg stands for gravity.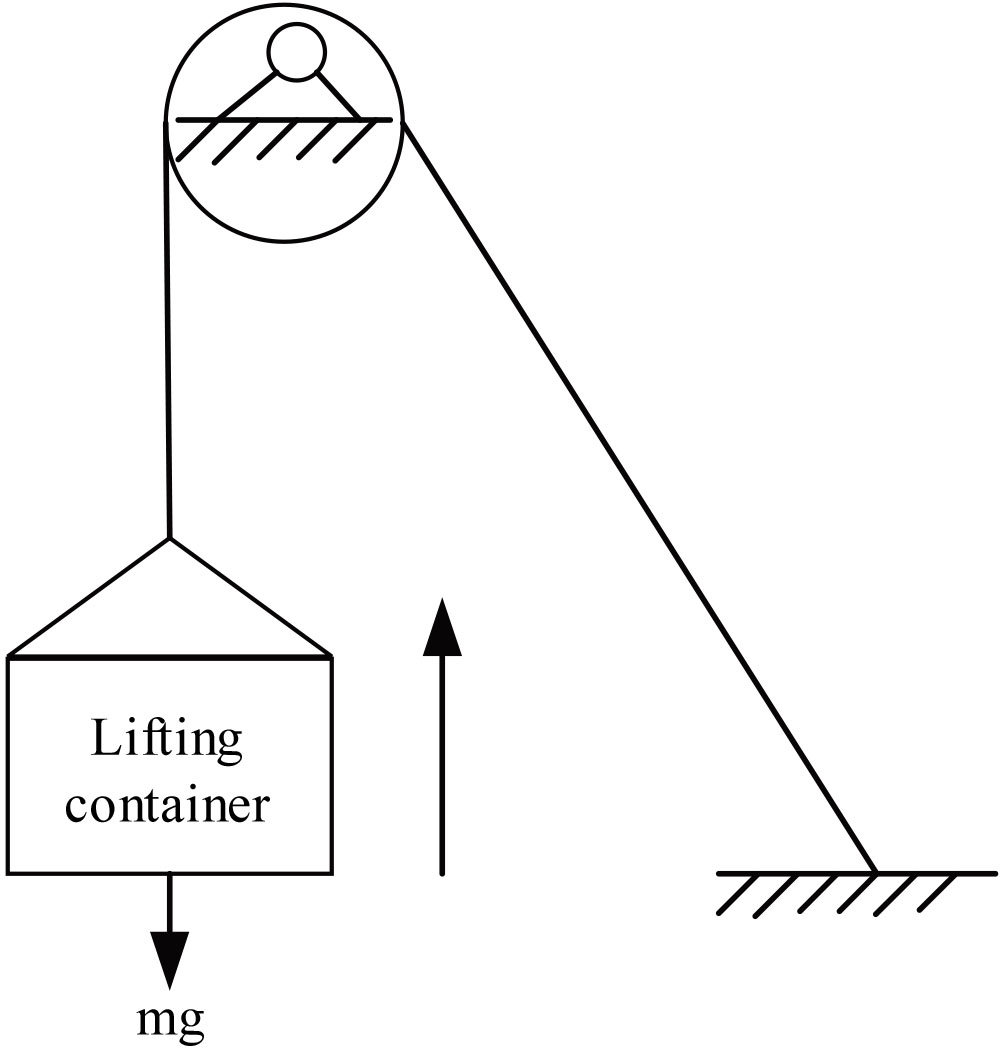
If the mass of the main rope is processed by Rayleigh method, and the mass of the tail rope is concentrated on the container, the hoist should work according to the 3-stage speed diagram as shown in Fig. 2.
Three stage velocity chart. Note: V represents speed, and t1, t2, t3 all represent a certain moment.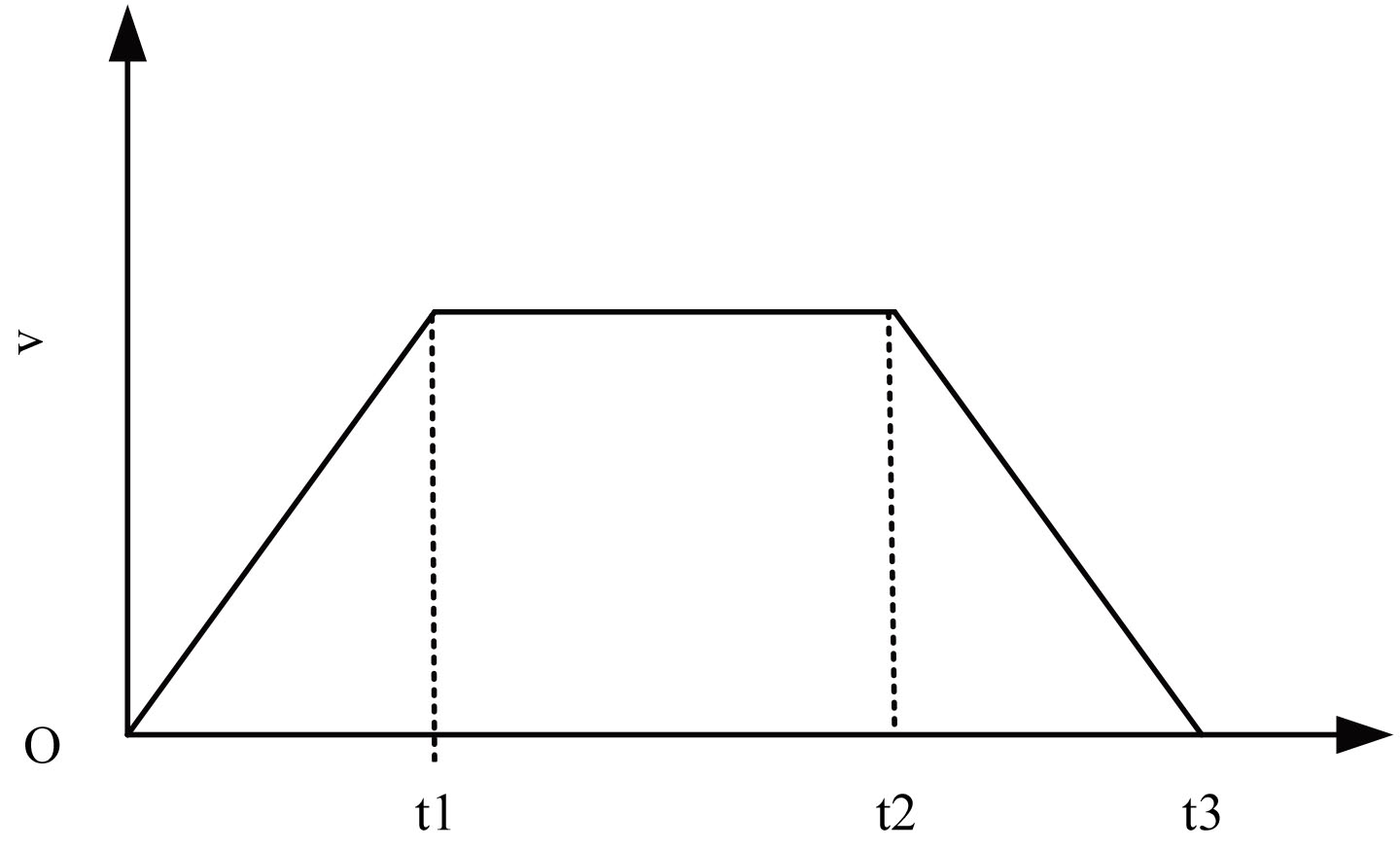
Taking the mechanical model of mineral hoisting constructed in Section 2.1 as the research object, a single neuron PID control model is constructed [6]. The traditional PID control principle is simpler, and the stability and the reliability are remarkable, widely uses in the metallurgy domain, the mechanical domain, the electric power domain. Due to the rapid development of modern industry and science and technology, the complexity of the controlled target is becoming larger and larger. Many controlled targets are uncertain and nonlinear. Related researchers have also improved the PID control, single neuron PID control came into being, can overcome the above problems. The single neuron PID control method uses the adaptive rule, can let the PID controller have the human brain cognition, the learning ability [7].
Neuron mathematical model
The neuron PID control can adjust the weight value of the controller according to the integral proportion and differential coefficient of the AC progressive signal of mineral hoisting and conveying machinery circuit and the AC output result of the mineral hoisting and conveying machinery circuit, realize the AC directional control of the mineral hoisting and conveying machinery fault circuit and make the mineral hoisting and conveying machinery circuit return to normal quickly [8, 9].
The neuron mathematical model is shown in Fig. 3.
Neural mathematical model.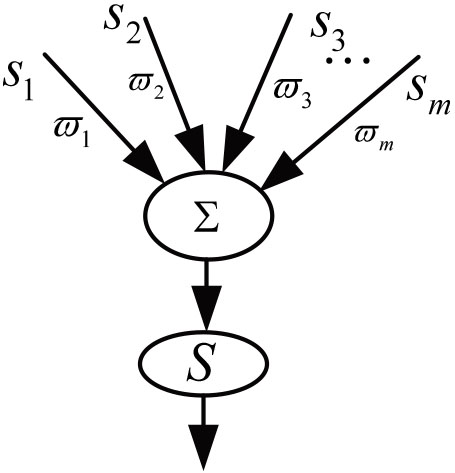
In Fig. 3,
The structure of single neuron adaptive PID controller is shown in Fig. 4. In Fig. 4,
Structure of single neuron adaptive PID controller.
The output signal of the adaptive neuron can be obtained when the neuron establishes the control signal by using the pattern of correlation retrieval, as shown in Eq. (1):
In the formula,
The single neuron adaptive controller can adjust the weighting coefficient to complete the self-adaptive and self-organizing functions. In this study, we consider that the weighted coefficient
In the above formulas,
On this basis, the performance index of the single neuron adaptive PID controller is set to the second power of the output error, and the performance index function can be obtained as shown in Eq. (4):
The correction direction of the weighting coefficient
In Eq. (5),
Design of single neuron PID controller
The deviation e and deviation change rate
The core of single neuron PID controller is fuzzy calculator. The fuzzy calculator has two parts: single neuron PID control rule and fuzzy inference. Fuzzy set is the key part of single neuron PID controller to perform arithmetic operation, i.e., the input fuzzy set can be calculated by fuzzy decision. The output control quantity can not be a fuzzy language, otherwise it can not drive the actuator, so it needs to control the controlled object again by unfuzzifying operation. Figure 5 shows the flow chart of single neuron PID controller.
Flow chart of single neuron PID controller.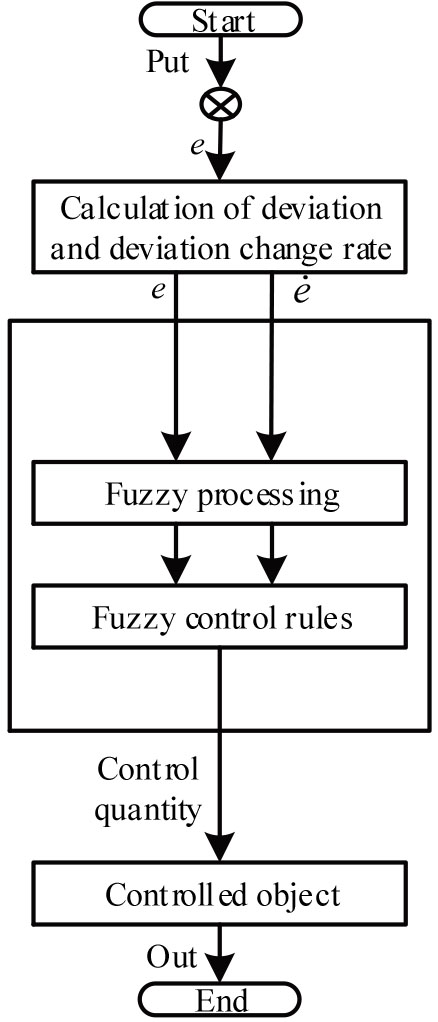
The operation process of single neuron PID controller is as follow:
Step 1: Confirm the fuzzy concept in single neuron PID controller; Step 2: Fuzzifying the precise deviation e input in Fig. 1 into a fuzzy set, that is, fuzzifying; Step 3: Determine the core of the single neuron PID controller, the control rules [14]; Step 4: Fuzzy decision; Step 5: Unfuzzify the fuzzy sets obtained through fuzzy inference in Fig. 1 into precise control quantities.
Fuzzification refers to discretization of input deviation
The input variable is changed from the basic universe to the corresponding fuzzy set universe and fuzzified [15]. In the process of fuzzification, the input variable is multiplied by the corresponding coefficient, which is the quantization coefficient. The coefficient multiplied by the deviation universe is the quantization coefficient
The output of the single neuron PID control algorithm is changed from the fuzzy universe to the corresponding basic universe, and the anti fuzzy processing is implemented. The fuzzy processing needs to be multiplied by the quantitative coefficient, and the non fuzzy processing also needs to be multiplied by a coefficient, which is the proportional coefficient
Define the speed controller port, optimize the input/output circuit, and output the lifting speed control command [16]. The controller has speed analog input module, defines input/output points, controls and feeds back lifting speed, as shown in Table 1.
Definition of controller I/O port
Definition of controller I/O port
Optimize the input/output circuit, use the input circuit to filter the collected signal, transfer the collected data to the output point of the controller, amplify the output signal power, and drive the industrial control components of the lifting machinery.
Calculate the deviation e between the set mineral speed and the actual mineral speed, and then input the speed deviation e into the PID controller [17]. The discrete PID control model is as follows:
In Eq. (11),
Because PID control has a strong dependence on parameter modification and does not have the function of adaptive parameter adjustment, it is necessary to adjust PID parameters adaptively through single neuron PID controller [18, 19]. By calculating the deviation E and deviation change rate
Single neuron PID control structure diagram.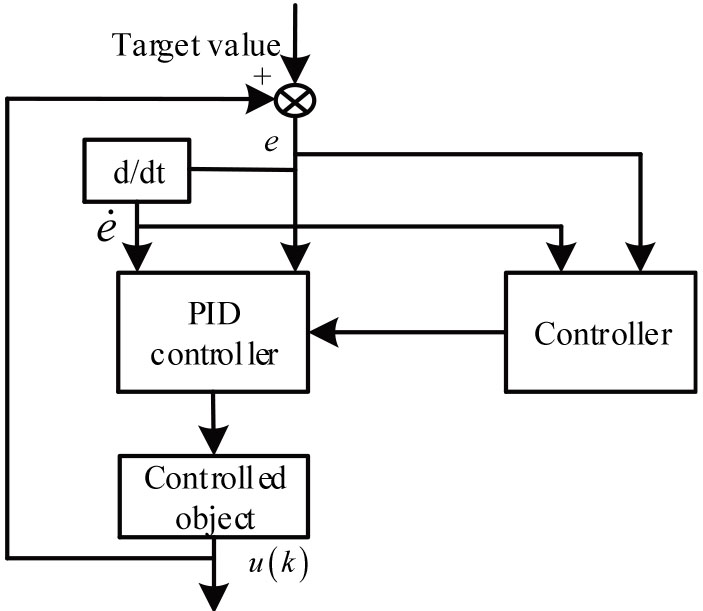
If {
Membership function.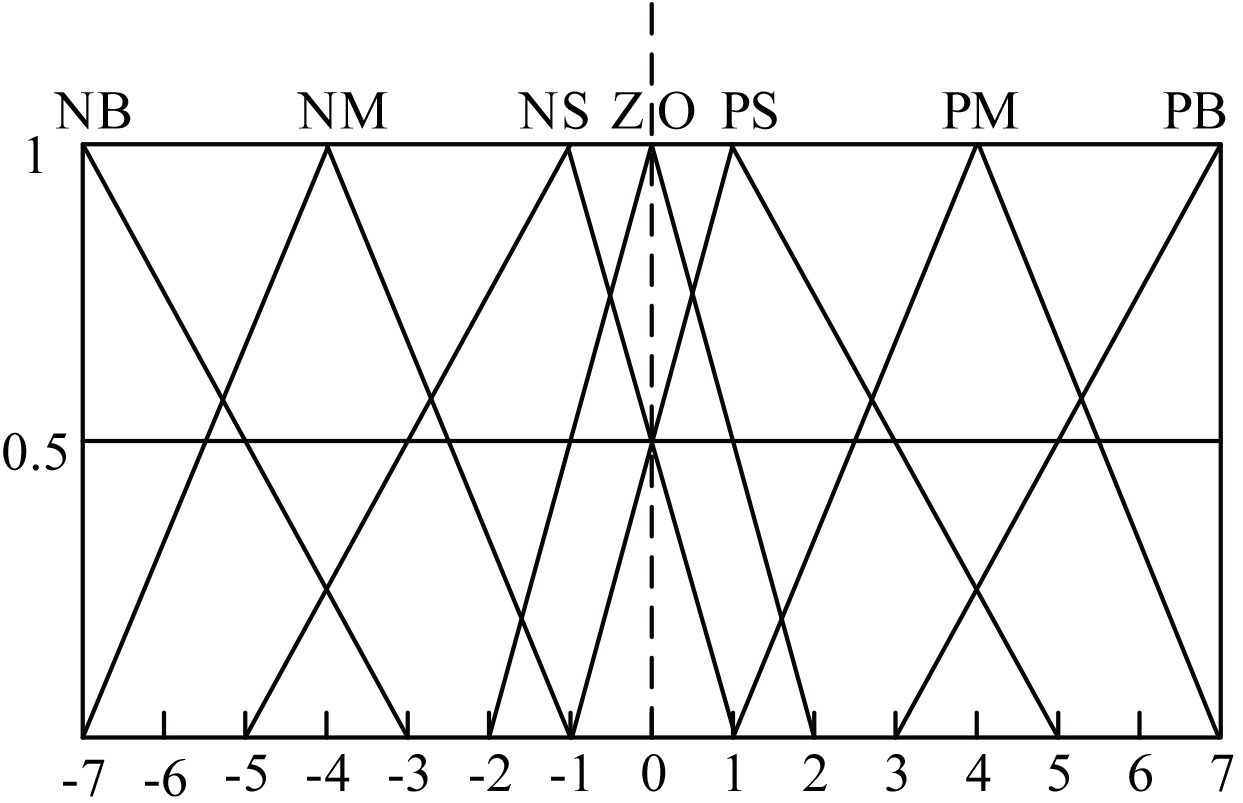
On this basis, the fuzzy logic relationship among parameters
According to the single neuron PID control rule obtained in the previous section, the maximum rotational speed and kinetic energy of the crane are calculated, and the rated torque of normal load is controlled within the rated torque of the motor, so as to ensure the maximum torque of the acceleration and deceleration of the mineral lifting and realize the speed control of the mineral lifting and conveying machinery.
Based on the deceleration ratio of the three-phase motor speed controller [20], the maximum speed
where,
In the formula,
where,
where,
where,
Taking Eq. (17) as a limiting condition, the reduced inertia of motor shaft can be expressed as:
The normal load rated torque is controlled within the rated torque of the motor to ensure the maximum torque of mineral lifting acceleration and deceleration. Within the maximum torque of the motor, when the starting torque of the mineral reaches the maximum, the pitch value
where,
The initial torque of mineral transport is used to control the speed of mineral lifting transport.
In order to verify the practical application performance of the crane mineral feeding speed control method based on single neuron PID, the following simulation experiments are designed on the MATLAB platform.
Taking the crane of a mineral mining company as the experimental object, the lifting height is between 0 m–35 m, and the average lifting speed is about 1.5 m/s. In order to avoid the singleness of the experimental results, the speed sensorless vector control method of series model based on stator current proposed by Hu et al. [3] and the fuzzy adaptive iterative learning control method of mechanical transportation proposed by Yi et al. [5] are compared to complete the performance verification together with the proposed method.
Firstly, the lifting deviation of the three methods is tested to preliminarily prove the effectiveness of the proposed method. The results are shown in Table 2.
Test results of lifting deviation of three methods
Test results of lifting deviation of three methods
According to the results in Table 2, in the case of different lifting distances, the lifting deviation of the method in this paper is between
On this basis, 150 m lifting height is selected to measure the relationship between lifting control adjustment time and speed control stability under the three methods. The results are shown in Fig. 8.
Relationship between time and speed control adjustment duration under different methods.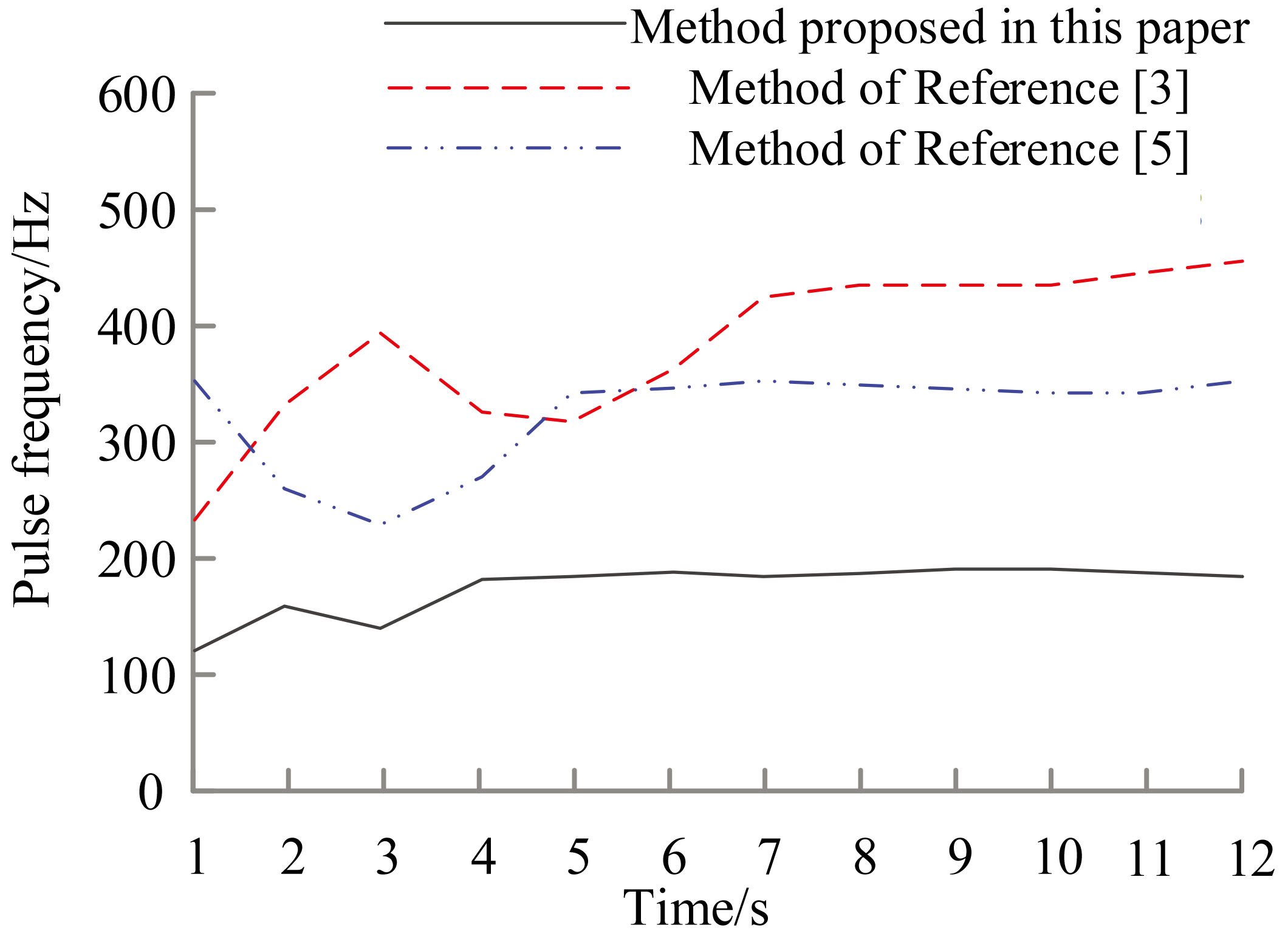
According to the results shown in Fig. 8, the speed control adjustment time of this method is less than 4 s, and the crane mineral transportation speed tends to be stable after 4 s. The adjustment time of the series model sensorless vector control method based on stator current is about 5 s, and that of the fuzzy adaptive iterative learning control for mechanical transportation is about 5 s. The above experimental results show that the control and adjustment time of this method is less than the two comparison methods, and the speed is stable and the process is faster.
Figure 9 shows the control delay test results of the three methods under different lifting speeds.
Test results of control delay with different methods.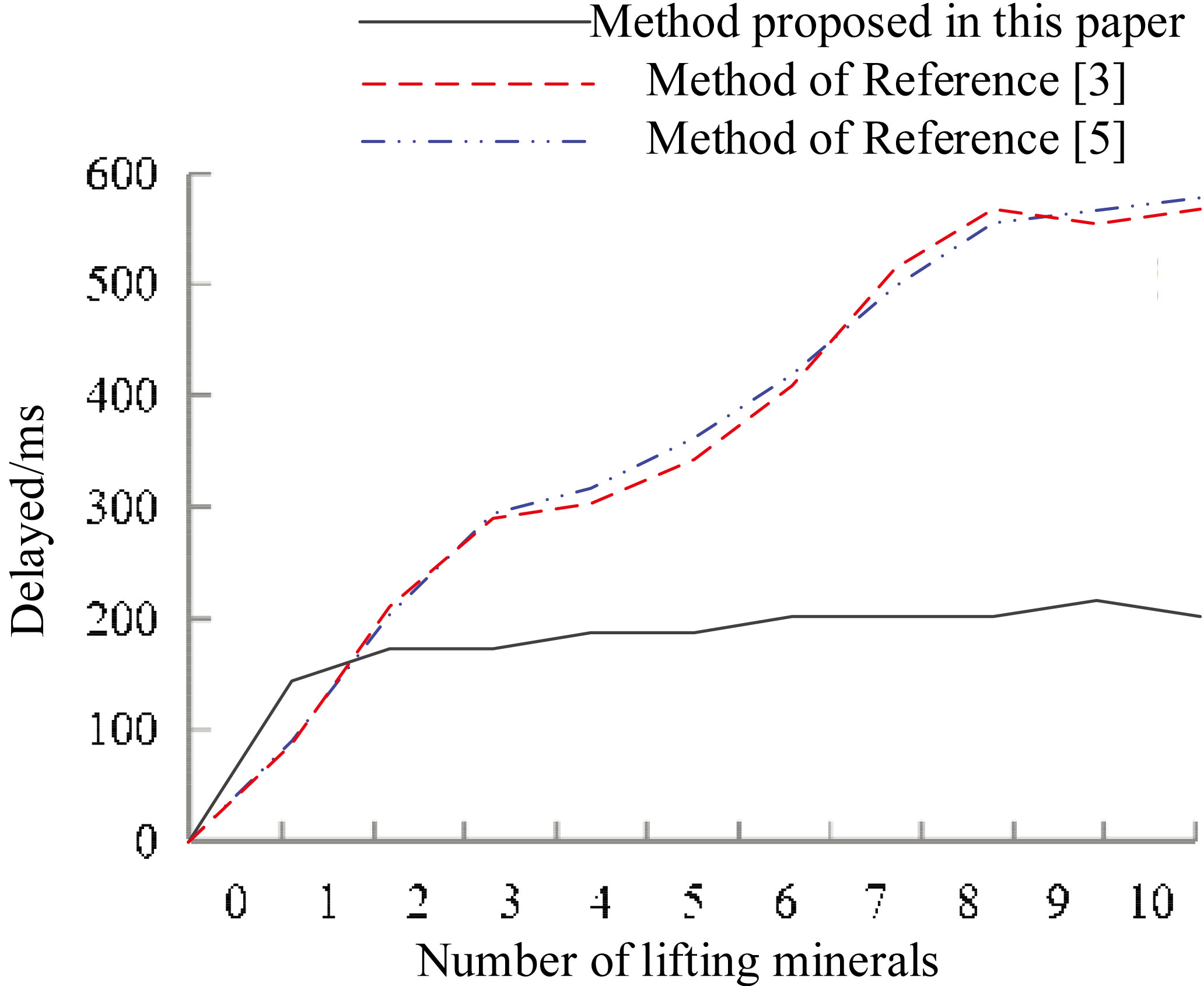
According to Fig. 9, the average control delay of this method is 200 ms under different amount of lifting minerals, and the maximum average control delay of the other two methods is 600 ms. The control delay of this method is obviously lower than that of the other two methods. The experimental results show that the control delay of this method is short.
On this basis, the hoisting speed of minerals is set as 50 pieces/min, and the speed control accuracy of three methods is counted by adding mechanical noise interference. The results are shown in Table 3.
Comparison of speed control accuracy of three methods
From the results in Table 3, it can be seen that the accuracy of the three methods decreases with the increase of mechanical noise. When the mechanical noise reaches 100 dB, the speed control accuracy of each method is the lowest, and the speed control accuracy of the method in this paper reaches 95.5%, while the speed control accuracy of the other two methods is less than 90%, and the speed control accuracy of the two methods is lower than that of the two comparison methods. Under the interference of mechanical noise, the maximum speed control accuracy of the method in this paper is 99.9%, while the maximum speed control accuracy of the other two methods is 96.3%. The method in this paper is better than the comparison method. The experimental results show that the method can effectively improve the stability of lifting and transportation.
In order to solve the problems of long delay, low precision and poor anti-interference ability of traditional hoisting and transportation machinery speed control method, a speed control method based on single neuron PID is proposed. A learning algorithm for optimizing the exchange commutation effect of mineral lifting and conveying mechanical circuits is introduced. Define the speed controller port, design a single neuron PID control rule, and complete the speed control of mineral lifting and transport machinery. The experimental results show that the speed regulation time of this method is less than 4 s, the average control delay is 200 ms, and the maximum speed regulation accuracy is 99.9%. Stability, has certain application value. Although this paper has some research results, the influence of environmental factors is not considered in the research on mechanical speed control. In the future, further research will be conducted on the influence of environmental factors on the speed control of mechanical equipment.