
Abstract
Traditional motion posture monitoring system has some problems such as time-consuming monitoring, low monitoring accuracy and poor monitoring effect. Therefore, this paper designs a real-time motion posture monitoring system based on sensor data flow. In the aspect of hardware, the whole structure of human motion posture monitoring system is designed. The mPU-92/65 six-axis motion processing sensor is selected to collect motion posture, and the module of human motion status detection is designed by MEMS sensor. In software, according to the amplitude fusion information of sensor output and correlation mining, fuzzy fusion model of motion posture data acquisition is established by using correlation component detection method, and real-time monitoring of motion posture is realized by combining sensor data flow technology. The experimental results show that when the number of iterations is 300, the motion posture monitoring accuracy of the designed system can reach 99.57%, the motion posture monitoring time is only 31 ms, and the motion posture monitoring recall rate is as high as 98.65%, indicating that the designed system can improve the motion posture monitoring effect.
Introduction
Human posture includes the static posture and moving posture of human body. Human motion posture measurement refers to measuring the information about human posture of human body or local parts of human body during movement, including spatial position, spatial shape, motion speed, included angle, force, acceleration, EMG signal, etc. And analyze the measured information to understand or obtain the instantaneous posture and posture change law of the human body [1, 2, 3]. Human motion posture measurement is an essential test technology for human information acquisition. It is widely used in sports training, gait and motion recognition, medical rehabilitation, sports and health management, biological authentication and other fields [4, 5]. In recent years, with the development and maturity of MEMS and semiconductor technology, micro accelerometer has been widely used in the design of human training intensity monitor and limb motion micro detection system. The acceleration tracking method based on MEMS technology is a contact measurement method, but due to the small volume of the acceleration sensor itself, combined with wireless communication technology, it has limited impact on human activities after it is fixed on the human body [6]. This method has no position requirements for other supporting equipment (such as emission source in electromagnetic tracking method, ultrasonic transmitter in acoustic tracking method, etc.), and can complete the detection of one measurement point only by single point independent operation. In most cases, the acceleration sensor is not as sensitive to the environment as photogrammetry, and it has the advantage of low cost. Acceleration tracking measurement technology not only provides a simpler path for human motion attitude measurement, but also creates a broad application prospect for itself [7]. Therefore, relevant scholars have studied this and made some progress.
Zhang and Zhang [8] proposed a real-time detection method of leg posture in football based on FSR and gyroscope. FSR and gyroscope are installed in the legs of football players respectively, and the pressure and angular velocity information collected by FSR and gyroscope are used to judge whether the legs of football mobilization are in motion state through the threshold obtained by dispersion. When the football player’s legs are in motion state, the time-domain and frequency-domain features of the data collected by FSR sensor and gyroscope sensor are extracted, and the collected time-domain and frequency-domain features are sent to the support vector machine classifier as training samples. The real-time detection of football leg posture is realized by the support vector machine classifier. The average detection time of this method is low, but the detection accuracy is poor. Sun [9] designed a real-time monitoring system for lower limb movement based on Internet of things technology, realized real-time acquisition of EMG signals during lower limb movement such as walking, running, high leg lifting, standing and sitting through signal acquisition hardware, real-time acquisition of attitude sensing signals and foot pressure signals, and transmitted the collected data to mobile terminals through Bluetooth protocol. Use mobile terminal app to identify motion categories and detect them in real time. The system can improve the accuracy of real-time monitoring of lower limb movements, but the average recall rate is low, resulting in poor monitoring effectiveness. Zheng [10] proposed an intelligent analysis method of motion training posture based on deep learning. Based on Arduino embedded development board, equipped with multiple IMU sensors, and combined with stepping motor, Zheng established a system to collect accurate human motion data such as speed and acceleration, and obtained accurate data of human motion. In order to accurately recognize human motion model, a deep learning model based on symmetric coding, time scale coding and structure coding is established. The classification error of this method is small, but the real-time motion monitoring efficiency is low, and the overall monitoring time is too long.
In order to solve the problems such as time-consuming monitoring, low monitoring accuracy and poor monitoring effect of previous research methods, a real-time monitoring system of motion attitude based on sensor data flow is designed in this paper, which can effectively improve the monitoring accuracy, reduce the monitoring time of attitude, and improve the monitoring effect. The specific design ideas are as follows:
In the aspect of hardware design, the overall design of real-time monitoring system of motion posture is carried out first, and the hardware block diagram of human body posture measurement terminal is given; According to the demand of motion posture monitoring, mPU-92/65 six-axis motion processing sensor was selected to collect motion posture. Then, based on the human motion state detection module of MEMS sensor, the hardware connection diagram between MMU-92/65 and HMC5883L is given to realize the initial selection of parameters between MMU-92/650 and HMC5883L. Finally, MEMS sensor is used for data acquisition and transmission control. In software design, data fusion method is first used to analyze and calculate information; Then through the understanding of the structure and classification of data fusion, choose the appropriate method for the next processing; Then the proper data fusion method is used to monitor and analyze motion posture in real time. Finally, based on the above, the design of distributed nodes is made by collecting motion and posture information of WSN. In the experiment part, the experimental plan is formulated first, and then the data source of this experiment is elaborated. In the following part, in order to verify the effectiveness of the design system for motion posture monitoring, FSR improvement method, Internet of Things method and deep learning method are used to make comparison with the design system in this paper. The validity of the system is evaluated by four indexes: the accuracy of motion posture monitoring, the monitoring time of motion posture, the recall rate of motion posture monitoring and the acceleration value of motion posture under different methods.
Overall system design
The overall structure of the human motion posture monitoring system designed in this paper is shown in Fig. 1. The system is mainly composed of three parts:
Five motion detection modules based on MEMS sensors are installed on the upper arm, forearm, chest, thigh and ankle joints respectively; Coordinate the ZigBee wireless data transmission network established by nodes, and use ZigBee wireless network to transmit data can increase the range of human motion [11, 12, 13]; The data is transmitted to the PC through ZigBee wireless network. Based on the data processing and display software of the PC, the attitude Angle calculation and motion state identification are realized, and the real-time performance of system detection and identification is improved [14, 15].
Overall structure of human sports posture monitoring system.
The hardware framework of human sports posture monitoring system is shown in Fig. 2, which mainly includes microcontroller and wireless transceiver module, PCB antenna, posture measurement sensor module, power supply module and serial port module for test.
Hardware block diagram of human posture measurement terminal.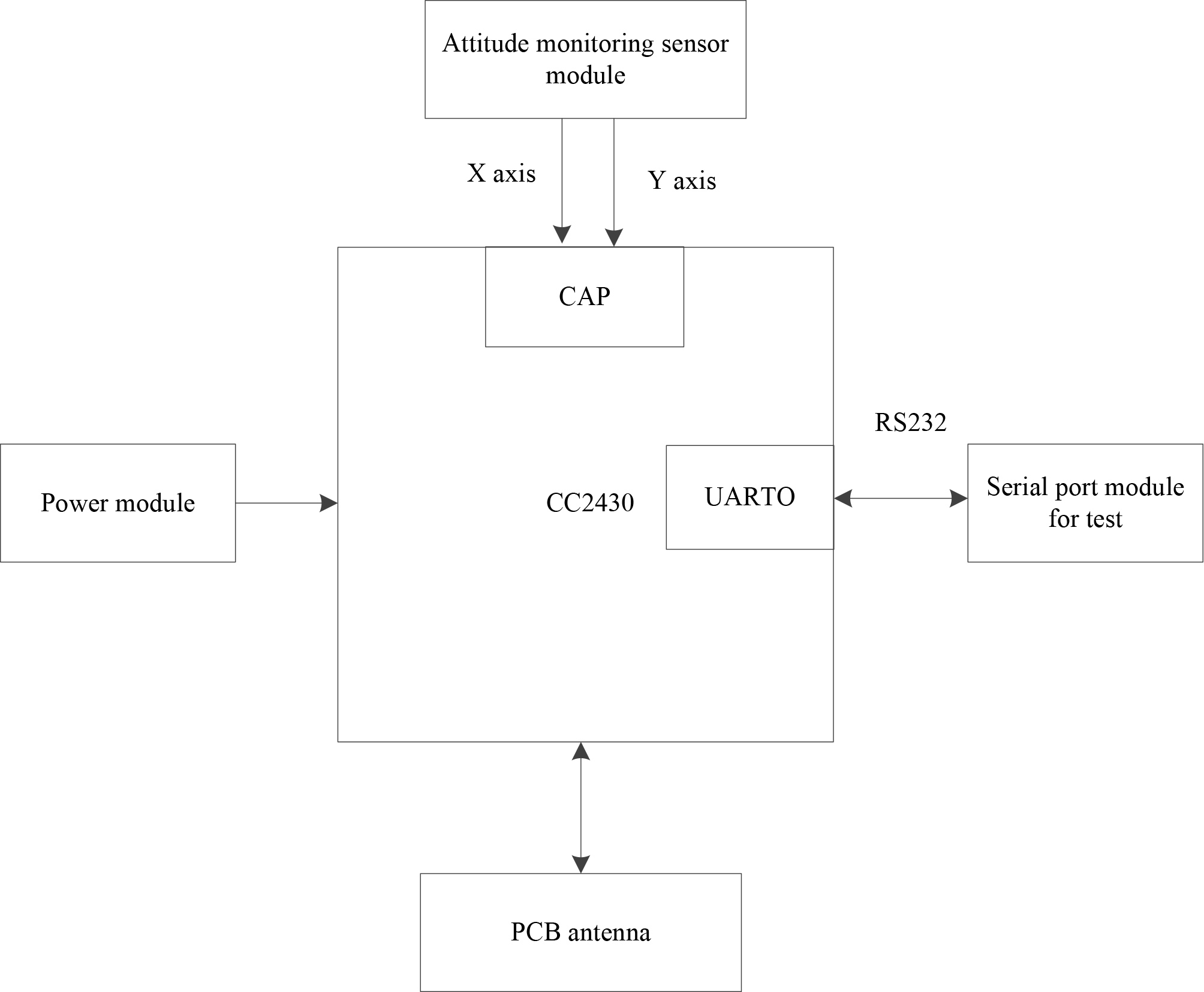
Schematic diagram of MEMS axis gyroscope and MEMS axis accelerometer.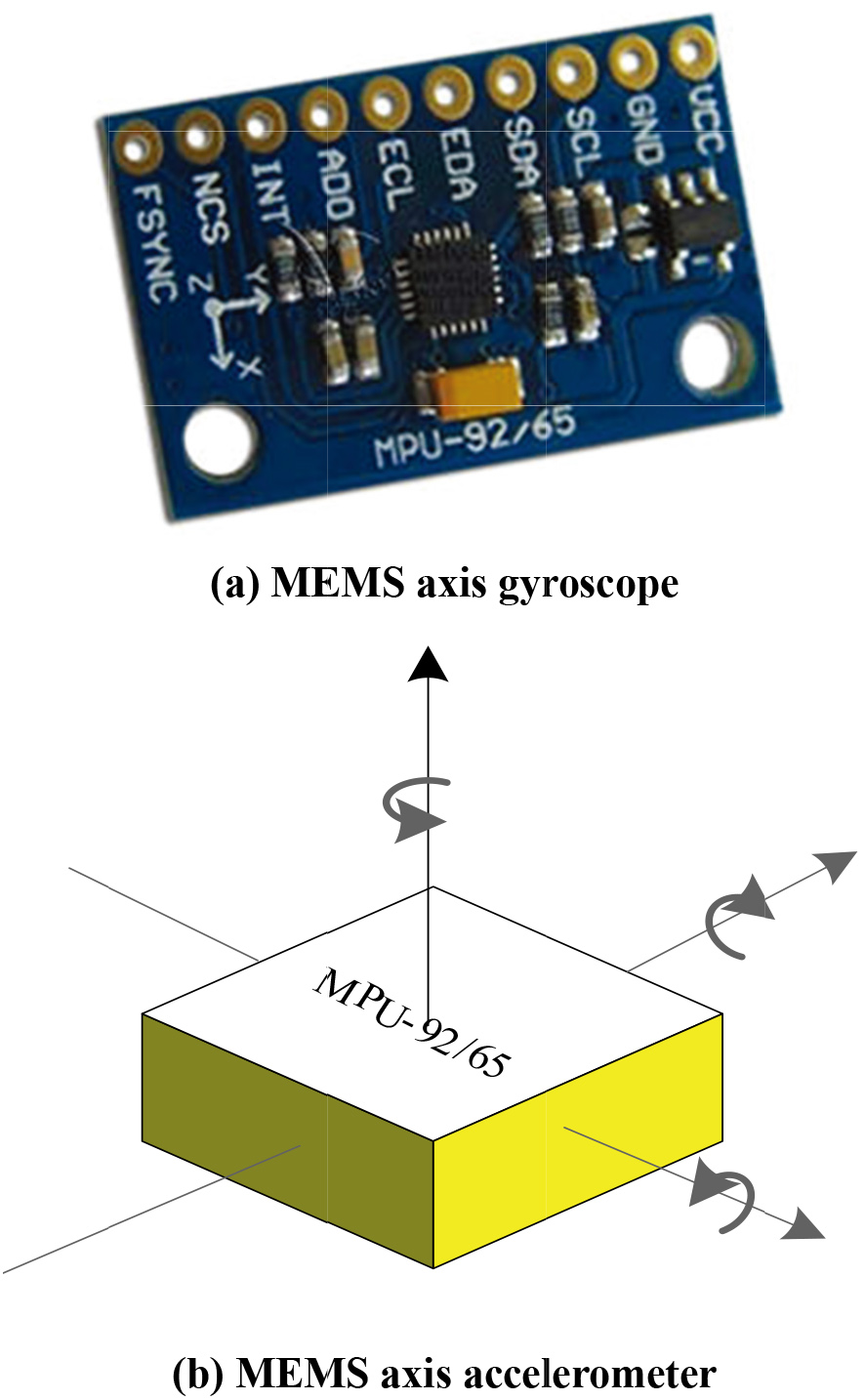
The motion state detection module in this paper is composed of two MEMS sensors and an MCU, which mainly realizes the detection and transmission of human motion information. Mpu-92/65 sensor includes a 3-axis gyroscope and a 3-axis accelerometer, which can measure the angular velocity information and acceleration information of the measured object at the same time, effectively avoid the axis difference between the gyroscope and the accelerometer, and the measurement range can be adjusted according to the actual needs [16]. Hmc5883l is a weak magnetic sensor chip used in the field of low-cost compass and magnetic field detection, which can detect the magnetic field in three axis directions [17]. The MCU of motion state detection module adopts stno2f103rbt6, has the latest Cortex-M3 architecture core of arm, has powerful data storage and processing functions, and has multiple and multiple communication interfaces, which can fully meet the data transmission requirements with sensors and wireless communication modules [18].
MPU-92/65 chip is the first six axis motion processing sensor in the world. It integrates a MEMS axis accelerometer, a MEMS axis gyroscope and an expandable digital motion processor DMP (digital motion processor), as shown in Fig. 3. MPU-92/65 MESE gyroscope measures the angular velocity in the process of sports, and the attitude angle of sports can be obtained by integrating the angular velocity. MEMS accelerometer measures the size and direction of the earth’s gravity field during the movement of the arm, calculates the angle between the human body and the direction of the gravity field, and then obtains some posture angles of sports.
Initialization contents of MPU-92/650 and HMC5883L
Initialization contents of MPU-92/650 and HMC5883L
Hardware connection between MPU-92/65 and Hmc5883l.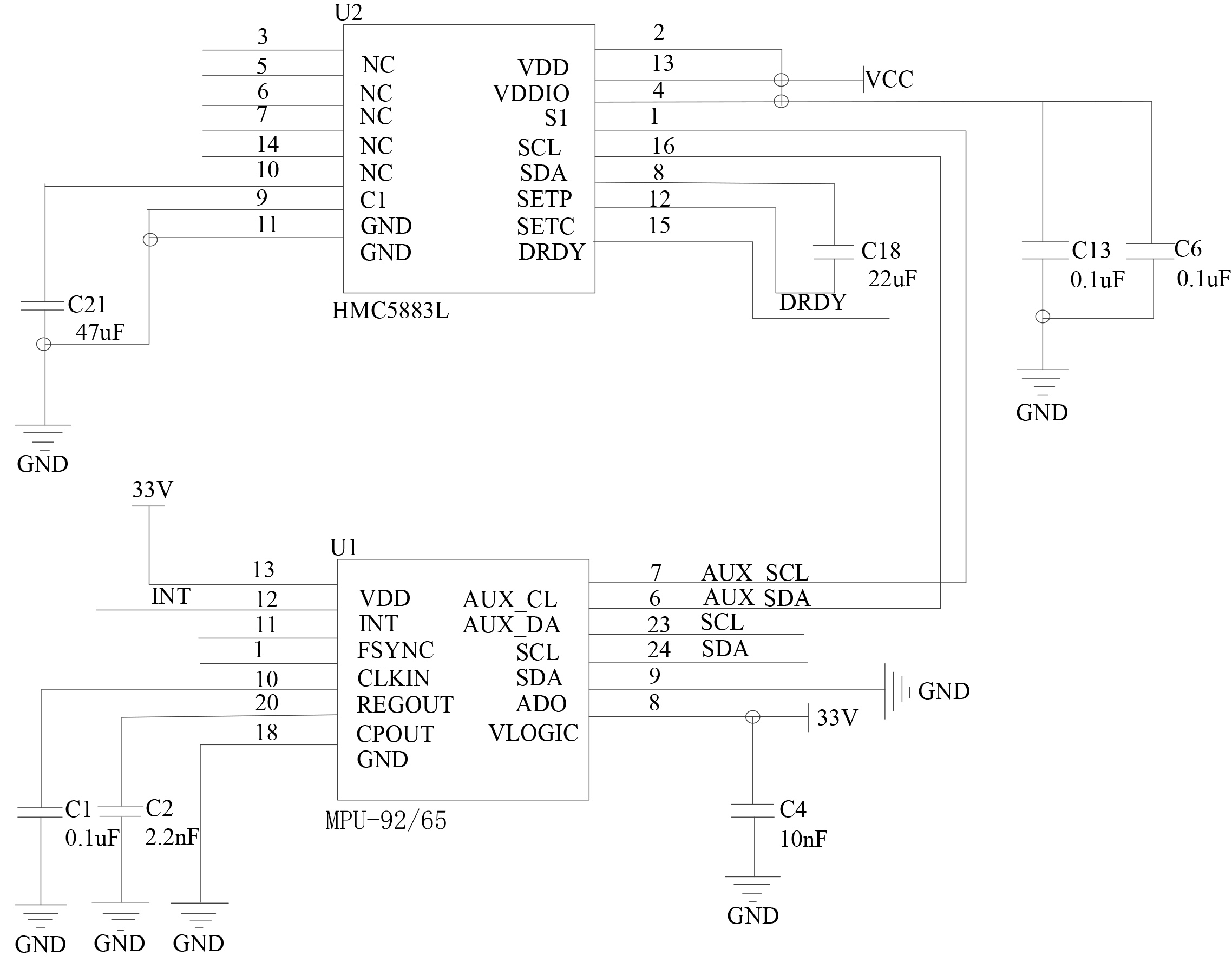
The MCU of MEMS sensor detection module adopts stm32f103rbt6, which receives the arm motion information collected by MEMS sensor through I
MPU-92/65 can be connected with a third-party digital sensor through I
Mpu-92/65 sensor needs to be initialized before data measurement. Set the sampling frequency and measurement range of gyroscope, the measurement range of accelerometer, the frequency of low-pass filter, and the interruption of AD conversion. Similarly, hmc5883l magnetometer also needs to initialize and set the sampling frequency and measurement range before data measurement. The initialization contents of MPU-92/65 and hmc5883l are shown in Table 1.
Software design of sports posture real-time monitoring system
Data fusion method
The fusion judgment of current environmental information is a basic ability generally owned by humans and organisms. Because the information supplied by human sensory organs to the brain has different characteristics, it can carry out local cognition and global cognition of physical phenomena in a certain spatial range. This processing process is complex and adaptive. Information with high value content can be extracted from a variety of information as a basis for judgment. Through the process of comprehensive analysis and processing of complex problems, the human brain changes from perception to cognition, that is, the process of information fusion.
Data fusion is a multi-source and multi-level information processing and evaluation process. It is a certain architecture formed by filtering, optimizing and characterizing information sources such as sensor data. This architecture is suitable for obtaining decision-making, interpreting information, target recognition and tracking, sensor management and system control. Multisensor data fusion simulates or expands the biological cognitive process to a certain extent.
In the multi-sensor system, the sensor obtains different kinds of data information, which is similar to the biological sensing information, but different from the biological sensing information. It is the result of refinement, concretization and digitization, such as the image data captured by the camera sensor, the audio data collected by the microphone, and the temperature and humidity data obtained by the temperature and humidity sensor, acceleration data collected by acceleration sensor, etc. The types of information obtained by different sensors are different.
In the data fusion process, by making full use of the resources of each sensor and analyzing and calculating the information collected by the sensor, a large amount of data information can be combined according to certain criteria to extract the key features or parts with high information content, so as to realize the reasonable description and interpretation of the objective environment. Compared with a single sensor, multi-sensor data fusion can obtain more comprehensive information of the object to be measured in the same time, and the reliability, timeliness and robustness of the fused information are much stronger.
Structure and classification of data fusion
Data fusion processing can be divided into centralized processing structure, distributed processing structure and hybrid processing structure according to different implementation occasions. According to the abstract level difference of target data in the fusion system, data fusion can be divided into three levels: data level fusion, feature level fusion and decision level fusion:
(1) Data level fusion
Data level fusion structure.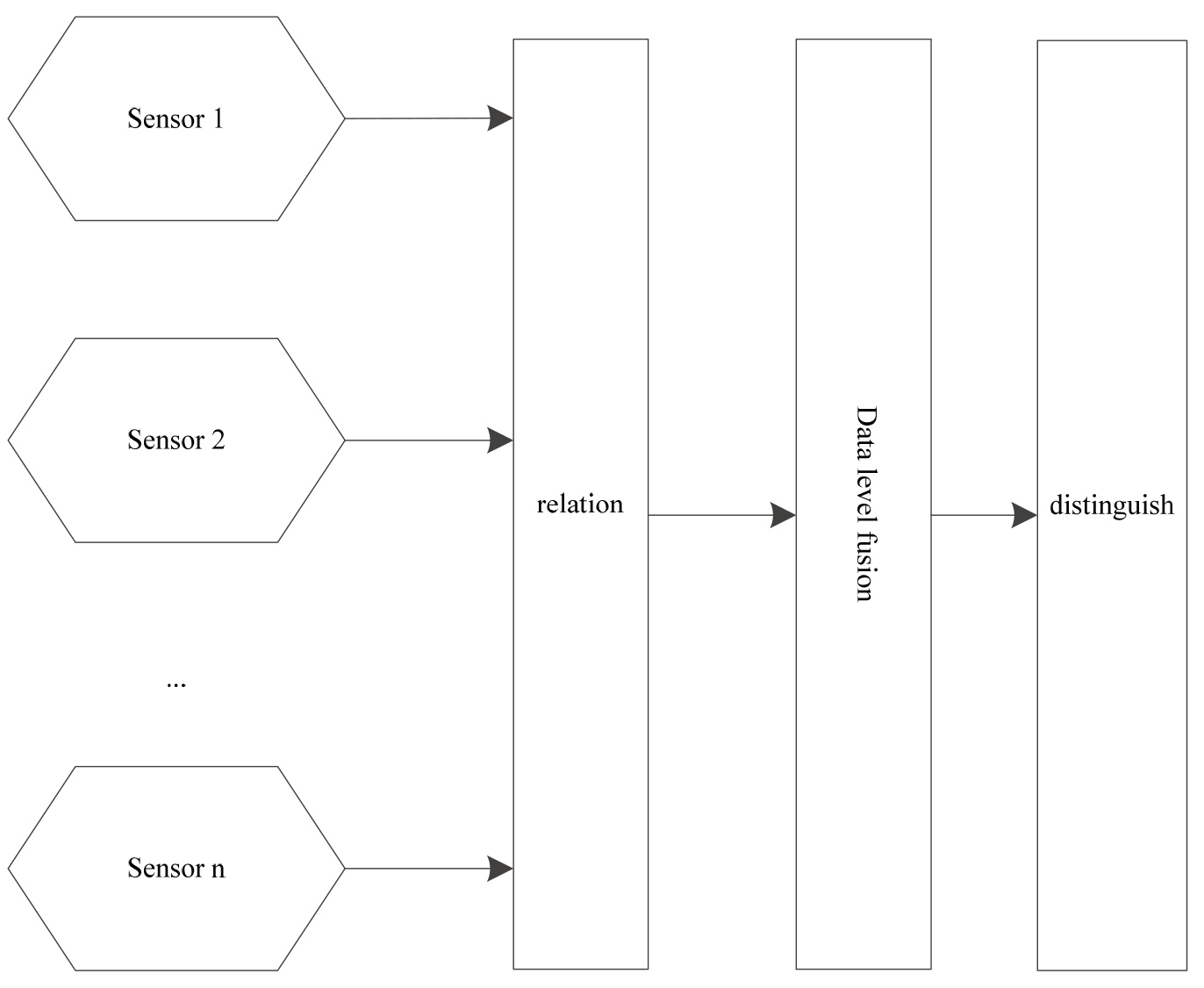
Data level fusion is the lowest fusion method in multi-sensor data fusion. It is used to process data with the same properties, that is, it requires the same properties of sensors. The fusion requires high target data, so it can restore the original information to the greatest extent and provide high-precision data. The limitations of this integration are as follows:
Raw data fusion without processing, large amount of information, consumption of a lot of time and hardware resources, poor real-time, high communication requirements. The target data layer is the lowest layer of information, which has poor stability and high requirement for error correction ability in the fusion process. The data source shall be the same type of sensor.
(2) Feature level fusion
Feature level fusion structure.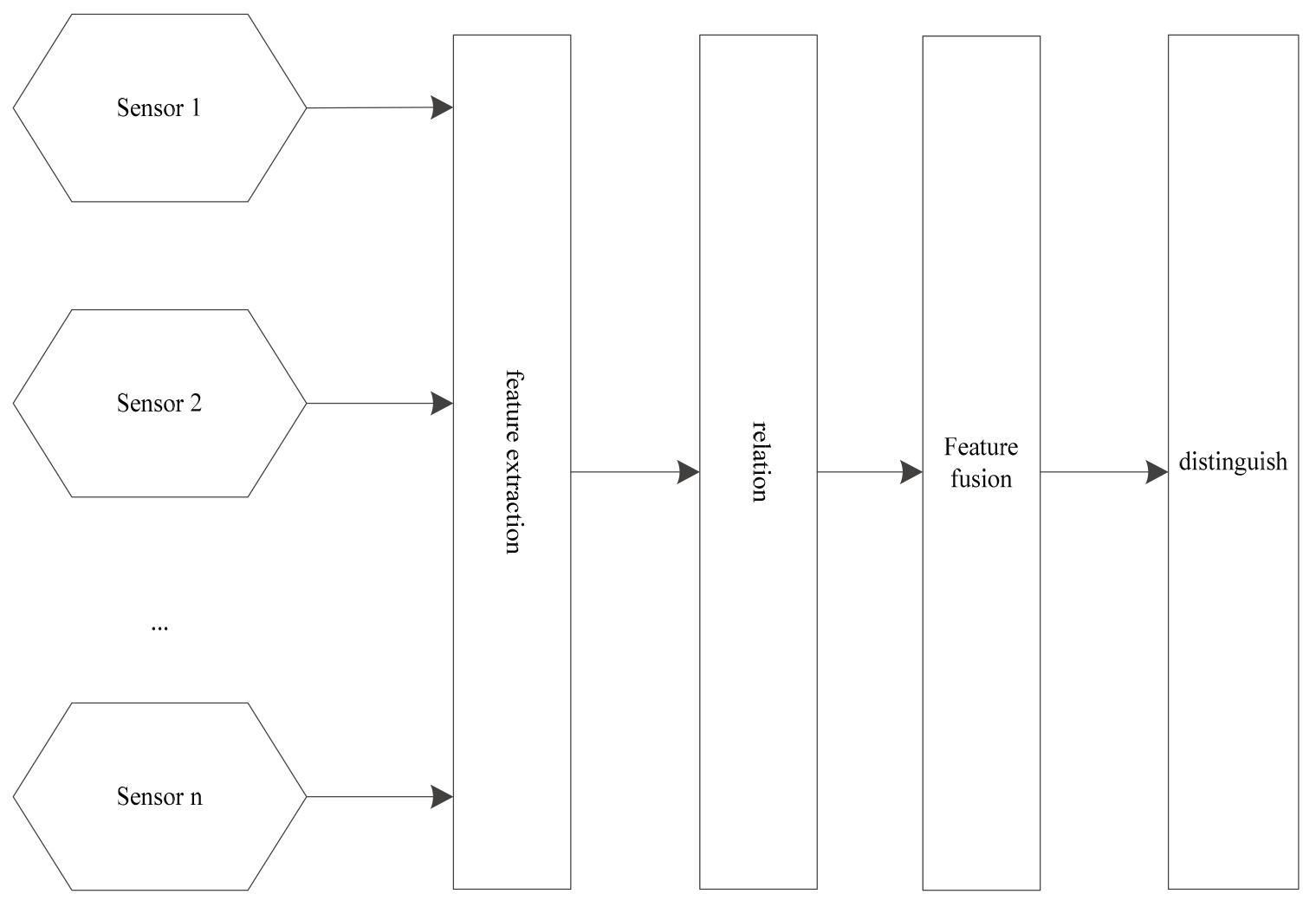
Features are the abstract results of the characteristics of an object or a group of objects. Through features, we can easily understand the behavior and attributes of the research object, so as to identify it in a group of objects with the same or different properties. Compared with data level fusion, feature level fusion first extracts relevant feature vectors from the original data collected by sensors, and then carries out relevant data fusion on the extracted feature information, which belongs to intermediate fusion. Feature level fusion extracts and simplifies the original data on the basis of the original data, which reduces a lot in the amount of data. At the same time, it has high fault tolerance and stability, and reduces the requirements for system resources and communication resources. Because there is no original level data, the original information cannot be restored in case of data loss, and the monitoring of the research object is lost.
(3) Decision level fusion
Decision level fusion structure.
Decision level fusion is an advanced fusion method in multi-sensor fusion. Compared with feature level fusion, its process is to preprocess the original data collected by multi-sensor independently, make independent decision classification for the research object, and fuse the data of their independent decision results according to specific algorithms. The optimal decision results with consistency are obtained, which provides a judgment basis for the system. Decision level fusion has strong pertinence to the research object, and the fusion process will have a direct impact on the accuracy of decision-making. Decision level fusion algorithm depends on practical problems and relevant professional knowledge. The commonly used methods include D-S evidence theory, Bayes estimation, fuzzy integral and expert system.
This design calculates the angle between the human body and the ground through the axial acceleration measured by the gravity acceleration sensor. In this paper, it is referred to as the acceleration sensor for short. In this design, the double axis acceleration sensor is selected, and the two axes are set as X axis and Y axis respectively. Take one axis as an example to describe its measurement principle. The measurement principle is shown in Fig. 8.
Angle measurement principle.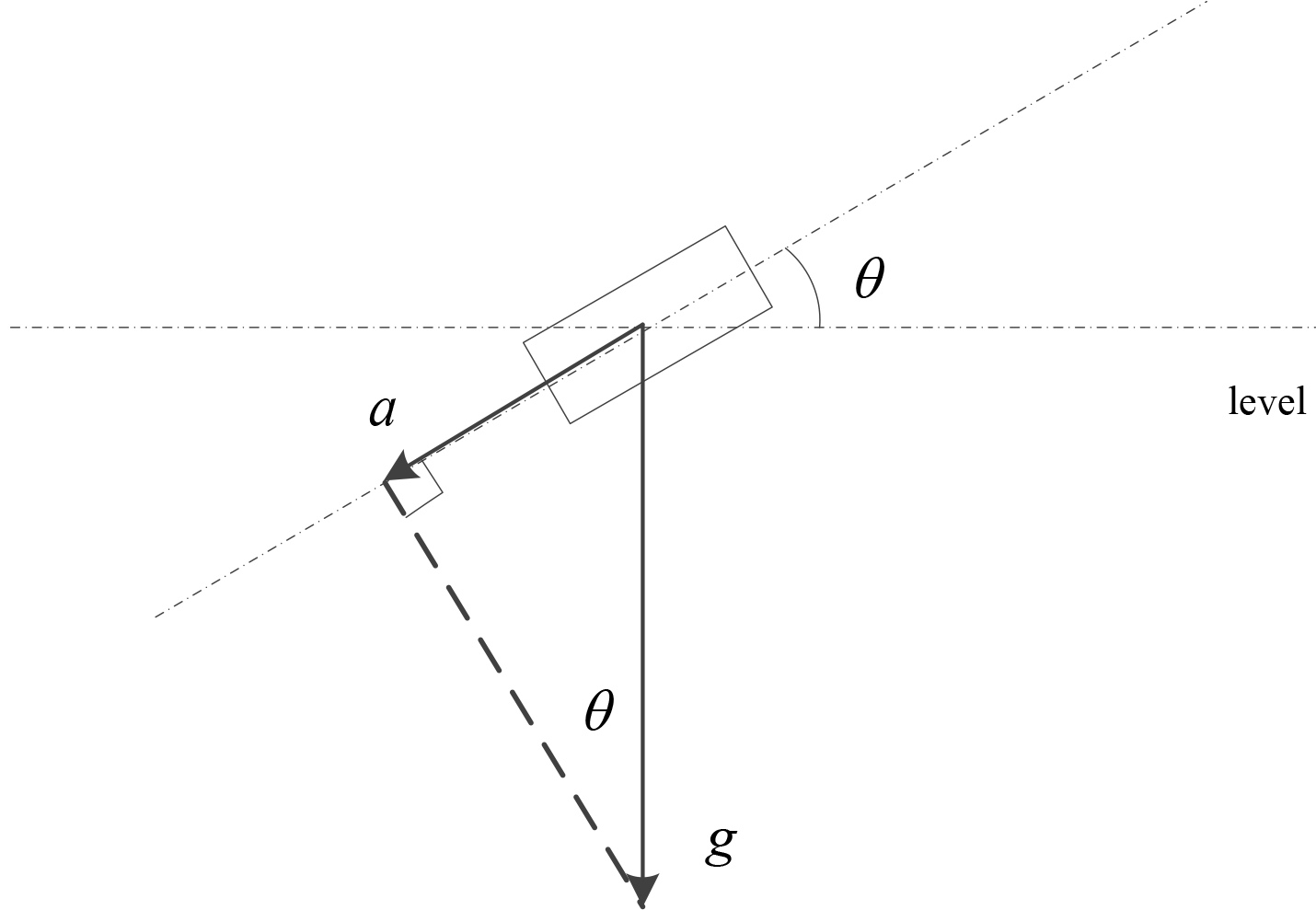
The axial acceleration can be divided into positive and negative, indicating the direction of acceleration. If the acceleration is positive in Fig. 8, the acceleration on the reverse extension line is negative. When the detected object is stationary or moving at a uniform speed, the acceleration of the acceleration sensor itself is zero. At this time, the axial acceleration of the acceleration sensor is only related to the angle. The relationship between axial acceleration
where
In this system, the acceleration sensor indicates the magnitude and direction of the measured axial acceleration a through the duty cycle of the output PWM waveform, as shown in Fig. 9.
Schematic diagram of PWM wave output.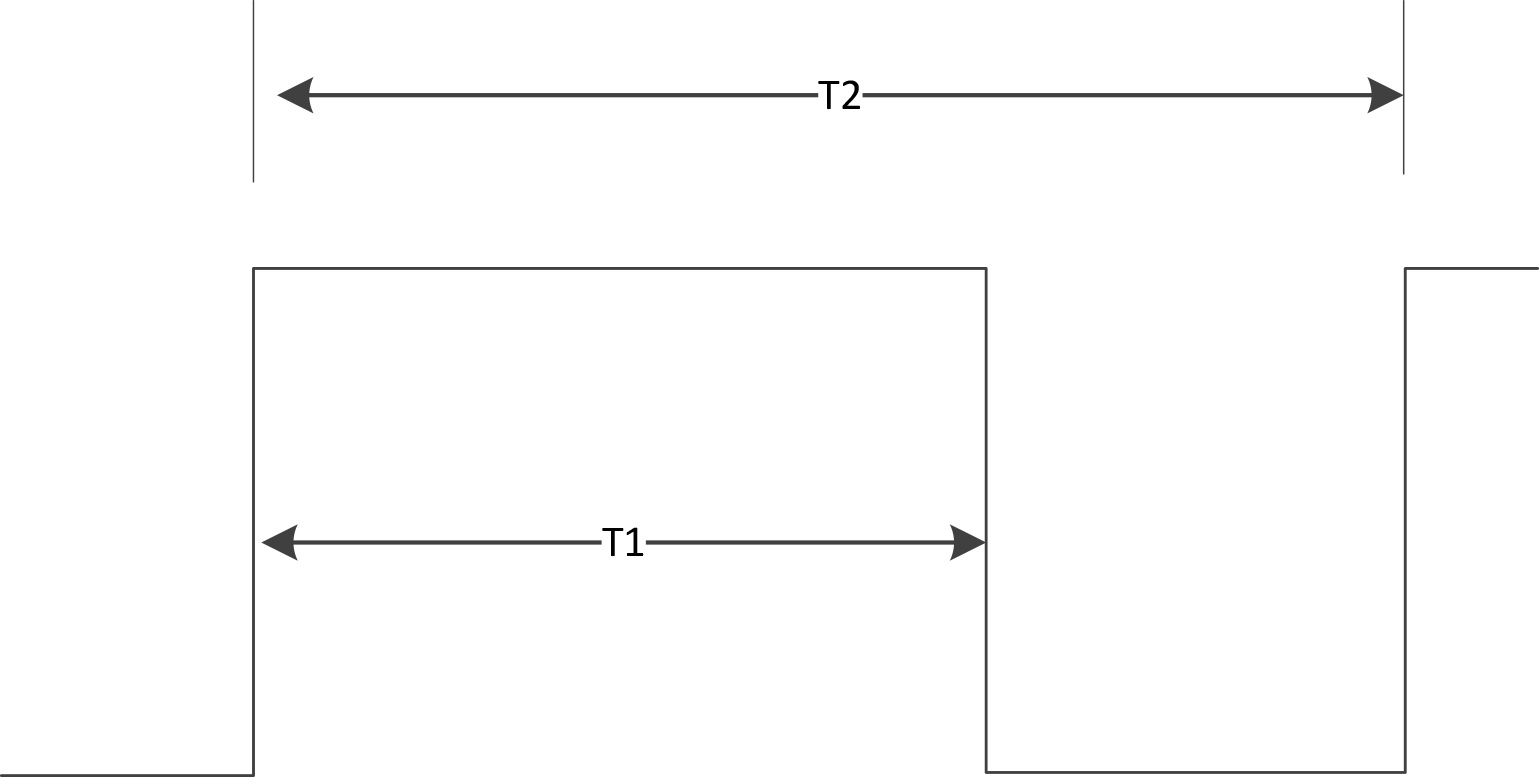
In Fig. 9, if the period of PWM wave is
The static range of the acceleration sensor is
Corresponding diagram of attitude and angle of acceleration sensor.
Based on the above design of distributed nodes for sports posture information acquisition using wireless sensor networks, sports posture monitoring is optimized, information fusion and association mining are carried out according to the oscillation amplitude of sensor output, and it is assumed that the interference component of sports posture data acquisition is
Among them,
Among
where
Experimental scheme
On the basis of software and hardware implementation of the system, the data of human motion posture are collected for subsequent analysis. Then four indexes were selected to measure the practical effectiveness of the human motion posture detection system proposed in this paper. The four indexes were the accuracy of motion posture monitoring, the monitoring time of motion posture of the monitoring system, the recall rate of motion posture monitoring and the acceleration value of motion posture under different methods. In order to verify the motion posture monitoring effect of the monitoring system, the improved FSR method, the Internet of Things method and the deep learning method were introduced as the control group of this experiment, and the results obtained by the design method in this paper were compared. Debug and test the human motion posture detection system, and finally analyze the result data. The specific data acquisition scheme and data analysis results are detailed below.
Data collection
20 volunteers participated in this experiment, mainly school students, 10 boys and 10 girls. Because the height and weight of volunteers will affect the experimental results, the height and weight of participants were measured. The average weight of participants was 60.36 kg, the average height was 169 cm, and the average age was 22 years old. When collecting, volunteers use the posture collector designed in this paper to wear five data collectors on the upper arm, forearm, chest, thigh and ankle respectively. When wearing correctly, volunteers simulate athletes’ Sports Behavior for data collection.
Experimental result
Accuracy of motion attitude monitoring of monitoring system
In order to verify the motion attitude monitoring effect of the monitoring system, FSR improvement method, Internet of things method, deep learning method and motion attitude monitoring accuracy verification of the design system are adopted. The results are shown in Table 2.
Motion attitude monitoring accuracy of monitoring system
Motion attitude monitoring accuracy of monitoring system
By analyzing Table 2, it can be seen that the motion attitude monitoring accuracy of the monitoring system is different under different methods. When the number of iterations is 50, the motion attitude monitoring accuracy of the improved FSR method is 78.45%, the motion attitude monitoring accuracy of the Internet of things method is 69.15%, the motion attitude monitoring accuracy of the deep learning method is 85.64%, and the motion attitude monitoring accuracy of the designed system is 99.87%; When the number of iterations is 200, the motion attitude monitoring accuracy of the improved FSR method is 80.14%, the motion attitude monitoring accuracy of the Internet of things method is 70.32%, the motion attitude monitoring accuracy of the deep learning method is 78.32%, and the motion attitude monitoring accuracy of the designed system is 98.54%; When the number of iterations is 300, the motion attitude monitoring accuracy of the improved FSR method is 85.09%, the motion attitude monitoring accuracy of the Internet of things method is 79.32%, the motion attitude monitoring accuracy of the deep learning method is 76.99%, and the motion attitude monitoring accuracy of the designed system is 99.57%; The accuracy of motion attitude monitoring of the designed system is much higher than that of other methods, which shows that the accuracy of motion attitude monitoring of the designed system is better.
In order to verify the efficiency of motion attitude monitoring of the design system, FSR improvement method, Internet of things method, deep learning method and design system are used for motion attitude monitoring time detection. The results are shown in Table 3.
Time for motion attitude monitoring
Time for motion attitude monitoring
According to Table 3, the efficiency of motion attitude monitoring is different under different methods. When the number of iterations is 100, the motion attitude monitoring time of the improved FSR method is 1865 ms, the motion attitude monitoring time of the Internet of things method is 1637 ms, the motion attitude monitoring time of the deep learning method is 1275 ms, and the motion attitude monitoring time of the designed system is 33 ms; When the number of iterations is 300, the motion attitude monitoring time of the improved FSR method is 1732 ms, the motion attitude monitoring time of the Internet of things method is 1682 ms, the motion attitude monitoring time of the deep learning method is 1221 ms, and the motion attitude monitoring time of the designed system is 31 ms; The design system always has high motion attitude monitoring efficiency, which shows that the design system has high motion attitude monitoring efficiency.
In order to verify the recall rate of motion attitude monitoring of the design system, FSR improvement method, Internet of things method, deep learning method and design system are used to detect the recall rate of motion attitude monitoring. The results are shown in Table 4.
Recall rate of motion posture monitoring
Recall rate of motion posture monitoring
Acceleration value of motion attitude under different methods.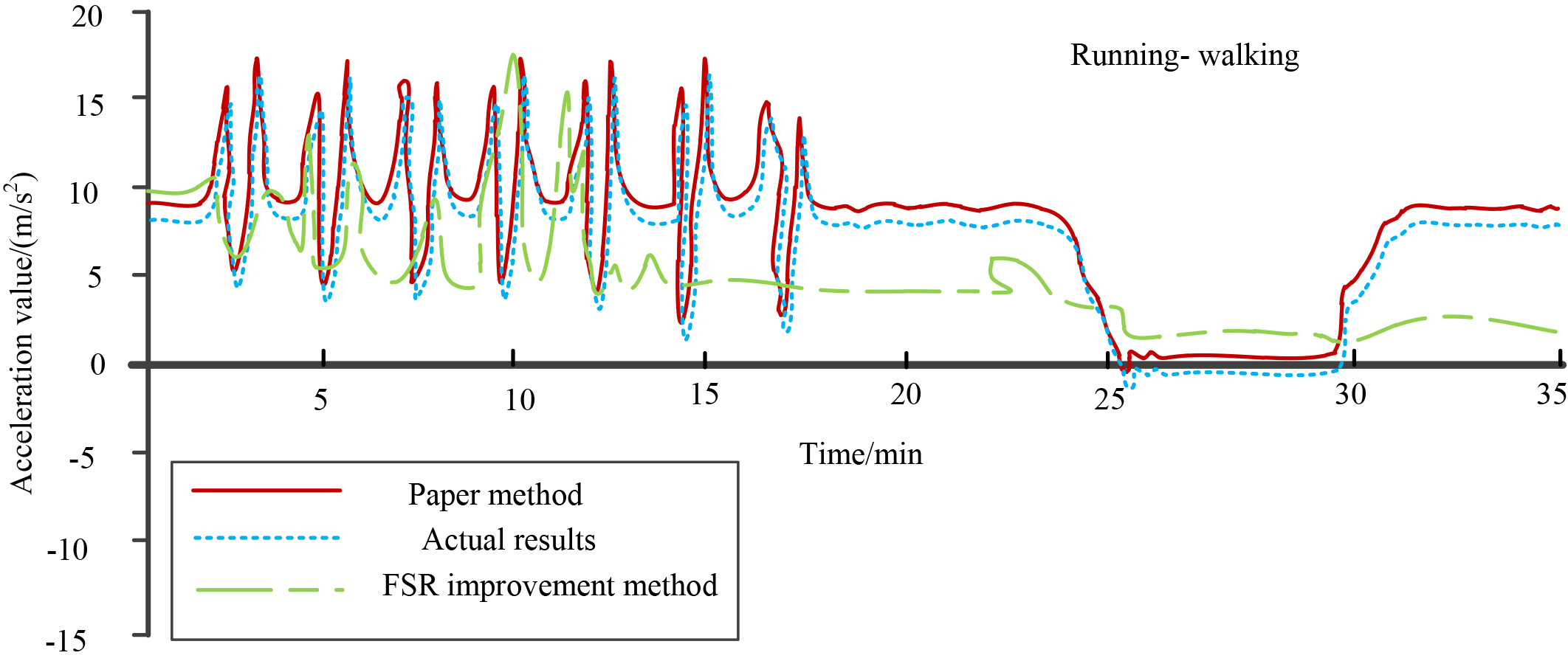
Table 4 shows that there are differences in the recall rate of motion attitude monitoring under different methods. When the number of iterations is 150, the recall rate of FSR improved method is 89.32%, that of Internet of things method is 86.32%, that of deep learning method is 80.26%, and that of the designed system is 99.53%; When the number of iterations is 300, the recall rate of motion attitude monitoring of the improved FSR method is 75.65%, that of the Internet of things method is 85.19%, that of the deep learning method is 85.19%, and that of the designed system is 98.65%; The designed system always has a high recall rate of motion attitude monitoring, which shows that the designed system can improve the effect of motion attitude monitoring.
In order to verify the motion attitude acceleration value of the design system, the improved FSR method is used to monitor the motion attitude acceleration value with the design system, and the results are shown in Fig. 11.
According to the analysis of Fig. 11, the monitoring effect of motion attitude acceleration value is different under different methods. When the human body is in the process of running to walking and the movement time is 5 min, the human motion acceleration value of this method is 3.9 m/s2, the actual human motion acceleration value is 4.2 m/s2, and the human motion acceleration value of the improved FSR method is 5.1 m/s2; When the motion time is 20 min, the human motion acceleration value of this method is 9.2 m/s2, the actual human motion acceleration value is 8.8 m/s2, and the human motion acceleration value of the improved FSR method is 4.8 m/s2; The human motion acceleration value of this method is close to the actual results, which shows that the monitoring effect of this method is good.
Conclusion
This paper designs a real-time sports posture monitoring system based on sensor data flow. According to the needs of sports posture monitoring, mpu-92/65 six axis motion processing sensor is selected to collect sports posture; The design of human sports state detection module is realized by MEMS sensor. The information fusion and association mining are carried out according to the output oscillation amplitude of the sensor. The fuzzy fusion model of sports posture data capture is established by using the correlation component detection method, and the real-time sports posture monitoring is realized by combining the sensor data flow technology. The following conclusions are drawn through experiments:
When the number of iterations is 300, the motion attitude monitoring accuracy of the designed system is 99.57%, which shows that the motion attitude monitoring accuracy effect of the designed system is good. When the number of iterations is 300, the motion attitude monitoring time of the design system is 31 ms, which shows that the motion attitude monitoring efficiency of the design system is high. When the number of iterations is 300, the recall rate of motion attitude monitoring of the designed system is 98.65%, indicating that the designed system can improve the effect of motion attitude monitoring.
Compared with the three systems in the control group, the system designed in this paper has the advantages of high monitoring accuracy, high monitoring efficiency, high monitoring recall rate and short monitoring time. It is of great significance for people’s sports training, gait and movement recognition, medical rehabilitation, sports and health management, biometric authentication and other fields. It not only provides a simpler path for human body motion posture measurement, but also creates a broad application prospect for its own. However, there are still some problems in this paper that need to be improved in the future. In the future research stage, the system designed in this paper will be further optimized to make the system more complete and efficient.