
Abstract
Due to limitations in computing power, the passive radar based on GNSS signal may not be able to use all the GNSS signals, requiring to make signal selection. Based on CRLB, a new radiation sources adaptive selection method for passive radar is proposed. With the goal of minimizing the CRLB of GNSS signals and the number of GNSS signals as constraints, an adaptive selection model is established. Simulation experiments were conducted using the selection model and particle filter algorithm. Experimental results show that the calculation accuracy of this algorithm is slightly lower than the tracking results obtained using all six satellites, but the calculation time is greatly reduced, reducing the requirement for radar computing power.
Introduction
The passive radar uses existing radio signals, such as communication radio signals, to detect and track targets without emitting its own radar signals. This approach has several advantages, including reduced detectability by enemies and improved resistance to electronic warfare [1, 2]. Passive radar technology can use a variety of radio signals as illuminators of opportunity, including FM radio, TV, mobile phone base stations, GNSS signals, and radar station signals [3, 4, 5]. In particular, many scholars are focusing on using GNSS signals as illuminators of opportunity for passive radar, which has several advantages, including global coverage and continuous operation in all weather conditions [6].
Target tracking in passive radar is a typical nonlinear problem, and there are several nonlinear filters can be chosen, including the extended Kalman filter (EKF) [7, 8], unscented Kalman filter (UKF) [9] and particle filter (PF) [10]. While the extended Kalman filter and unscented Kalman filter can be used for nonlinear target tracking in radar systems, particle filtering offers a powerful alternative that can handle a wide range of nonlinear and non-Gaussian systems without requiring any assumptions about the underlying probability density function (PDF). Particle filtering uses a set of particles to represent probabilities. These particles are propagated through the system model, and their weights are updated based on the likelihood of the measurements. The particles are resampled to obtain a new set of particles for the next iteration, and the process is repeated. The CONDENSATION algorithm, developed by Isard and Blake in 1998, was one of the first particle filter algorithms to be applied successfully to target tracking in radar systems. Since then, many variants and improvements of the particle filter have been developed, including the bootstrap filter, the auxiliary particle filter, and the particle swarm optimization filter [11, 12, 13]. Also, some scholars have solved this nonlinear problem by improving the traditional Kalman filter [14].
With the increasing number of on-orbit satellites and the development of satellite communication, the amount of electromagnetic wave signals in the air has also increased. This can create challenges for radar receivers, which may receive echos from multiple different satellite signals. To address these challenges, it is important to select a good combination of GNSS signals for target tracking. This can help to improve performance while minimizing the processing load on the information fusion center, especially when computing power of which is limited. In selecting a good combination of GNSS signals, various factors should be considered, such as the quality of the signals, the number of satellites in view, the available bandwidth, and the signal-to-noise ratio. During the tracking process, both the satellite and the target are moving, so the geometric relationships among the radiation source, target, and receiver are constantly changing. It is important to balance these factors and choose a combination that provides the best possible performance given the system’s resources and constraints.
In [15], two external radiation source optimization algorithms are proposed from the perspective of resolution units and resolution capabilities, and the algorithms are verified using GNSS as an external illuminator. In [16], on the premise that the Beidou Navigation Satellite System (BDS) is selected as the illuminators of opportunity, the ballistic missile as the radar carrier, and the aircraft carrier as the target, a method for radiation source selection was given from the view point of the resolution required for target tracking. The selection of radiation source when GNSS signal is used as illuminators of opportunity is studied, but the evaluation standard is relatively rough in [15, 16]. The Cramér-Rao lower bound (CRLB) is the lowest variance that all unbiased estimates can achieve. In the context of tracking target, it can be used to assess the precision and accuracy of estimates of the target’s location or other characteristics in passive radar. The tracking performance of the passive radar can be improved by using the CRLB to establish the optimization method and selecting the appropriate radiation sources or sensors [17, 18, 19]. The posterior expectation and its variance of a parameter can also be used to solve the optimization problem of the sensor network of the passive radar [20]. However, the research objects are the ground radiation sources, and most of the problems solved are the selection of sensors in radar network in [17, 18, 19, 20]. According to the public reports, there is little research on the selection of radiation sources in passive radar based on GNSS signals.
This paper is organized as follows. We present the problems to be solved in the passive radar in Section 2. The particle filter algorithm for target tracking is introduced in Section 3. The adaptive selection algorithm of illuminators of opportunity based on CRLB is studied in Section 4. The performance of the algorithm proposed in this paper is evaluated by simulation experiment in Section 5, Finally, in Section 6 we draw our conclusions.
Problem formulation
Schematic diagram of passive radar target tracking.
Considering the GNSS signal as the illuminators of opportunity, the radar simultaneously receives the direct wave of multiple satellite signals and the electromagnetic wave reflected by the target. After signal processing, the radar has completed target detection and obtained motion parameters of the satellite and target relative to the radar. The principle is shown in Fig. 1. At moment
where,
where,
Set the number of GNSS signals participating in target tracking as
where,
where,
The detailed derivation of particle filtering is provided in [13], and the main steps are presented here:
(1) Importance sampling
Sampling new particles
(2) Update weight
Calculating the weight of the new particle set
where,
Normalization:
(3) Resampling
Calculating effective particle number
If it is less than the given threshold
(4) State estimation
The target state estimation is calculated according to the weight and state of all particles.
Calculating variance:
Return to step (2).
By defining the CRLB as the objective function and setting constraints on the number of GNSS signals used, we can formulate an optimization problem to find the optimal combination of radiation sources for tracking. This approach can help improve the accuracy and reliability of the passive radar by optimizing the selection of data sources and minimizing the impact of noise and other uncertainties.
The passive radar is essentially a bistatic radar. Assuming that the distances from the target to the transmitter and receiver are
where,
When the GNSS signal is used as the radiation source, the radar ranging error obeys a Gaussian distribution with an expectation of zero. Assuming the bandwidth of the
Similarly, the Doppler frequency measurement error of the radar obeys a Gaussian distribution with an expectation of zero, and the standard deviation is [21]:
where,
CRLB provides a lower bound of the covariance matrix of the target state estimation error, that is, the unbiased estimator
where,
where, the meaning of
Therefore, it can be obtained that the CRLB matrix of the passive radar using multiple GNSS signals at time
CRLB improves an effective metric for target tracking accuracy, which is related to many factors such as the GNSS signal transmission power, bandwidth, carrier frequency, radar gain, noise coefficient and the spatial position relationship of the target relative to the radar and satellites. The calculation of CRLB is independent of specific tracking filtering algorithms and has a low computational complexity.
To locate and track of target using passive radar based on GNSS signals, at least 4 satellites are required [23]. Increasing the number of satellites will improve the accuracy of target location and tracking, but at the same time it will increase the calculation of tracking algorithm, which will affect the real-time performance of target tracking. In this paper, 4 satellites are selected for target tracking. Therefore, the radiation source adaptive selection model can be expressed as:
where,
Currently, there are four GNSS systems. So there are 4–6 satellites from the same system illuminating simultaneously at any position on the Earth. When the four systems work simultaneously, there will be 16 to 24 satellites illuminating at each position simultaneously. The visible time of each satellite varies from 60 minutes to 360 minutes.
To verify the effectiveness of the algorithm proposed in this paper, simulation data is used for analysis. During the simulation process, it is assumed that a total of 6 satellites of BDS illuminate the target at the same time. Due to the use of multiple satellites in the same GNSS system, it is assumed that the parameters of these satellites are the same, and the parameters are shown in Table 1. The initial spherical coordinates of the satellites relative to the receiver are (25011382 m, 290.99
Parameter settings of the radar system
Parameter settings of the radar system
Substitute the above parameters into the calculation to obtain the tracking result of the target, as shown in Fig. 2. Figure 3 shows the estimated results of the target’s X direction, Y direction, and target velocity calculated by the algorithm in this paper. As can be seen from the figure, the estimated position and speed of the target are close to the true value, and the algorithm in this paper has obtained good tracking results.
In order to further study the advantages of the algorithm in this paper, four randomly selected and all six satellites were used in target tracking, and their position root mean square errors (pos_RMSE), velocity root mean square errors (vel_RMSE) and calculation time were calculated respectively. The calculation time is the sum of target detection time and target tracking time, and the calculation formulas for pos_RMSE and vel_RMSE are as follows:
where,
The results of 100 Monte Carlo simulations were compared with the algorithm in this paper, as shown in Table 2.
Calculation results and time comparison table
The tracking result of the target.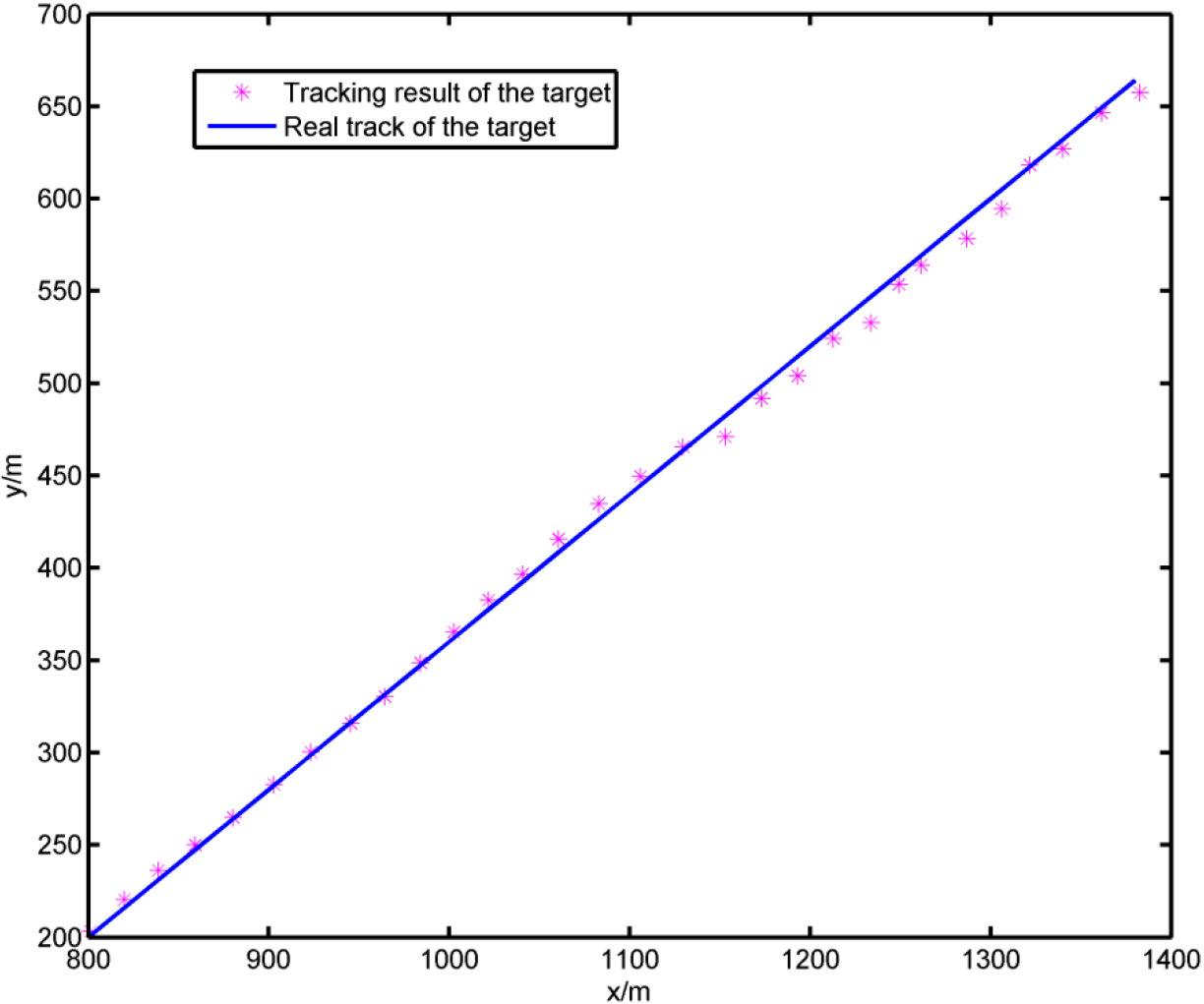
Target velocity estimation results.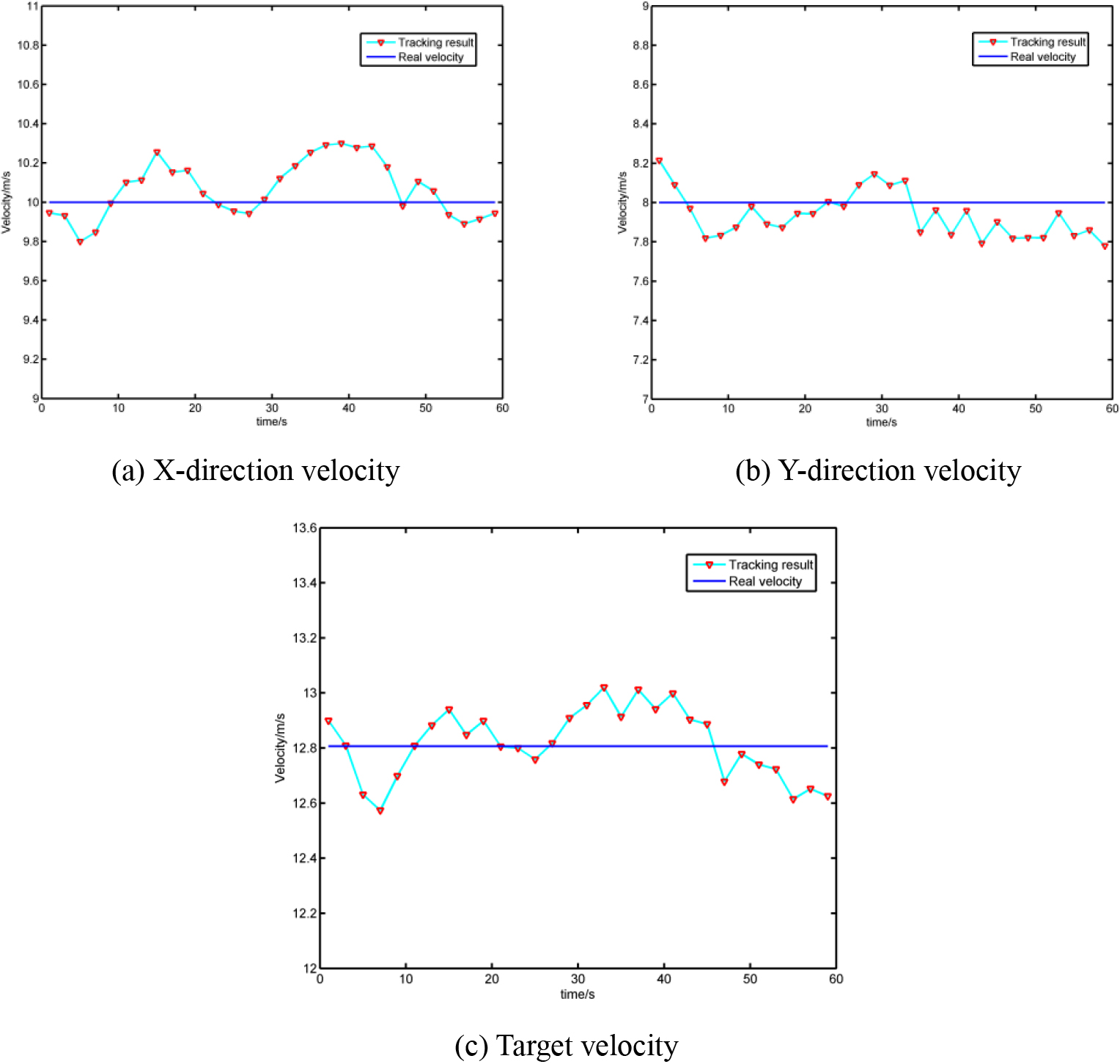
From Table 2, it can be seen that the pos_RMSE obtained by the algorithm in this paper is about 8.05 m, and the vel_RMSE is about 0.25 m/s, both of which are better than the tracking results obtained by randomly selecting four satellites, and worse than the tracking results obtained by using all six satellites. However, the algorithm in this paper takes 281.65 s, which is equivalent to the time spent when randomly selecting four satellites, and is far less than the time spent when using all six satellites.
Based on CRLB, a new adaptive selection method of radiation sources in passive radar based on GNSS signal is proposed. Using multiple parameters of GNSS signals, the CRLB of each GNSS signal combination is derived. With the goal of minimizing CRLB and four GNSS signals as constraints, an radiation source adaptive selection model is established. In simulation experiments, the selection model and particle filter algorithm are used to track a single linear moving target. Experimental results show that the root mean square errors of position and velocity obtained by the algorithm in this paper are 8.05 m and 0.25 m/s, respectively, which are increased by 11.65% and 13.64% compared to using all six satellites, but the calculation time is reduced from 415.34 second to 281.65 second by 32.19%.