
Abstract
In Wireless Sensor and Actor Networks (WSANs), sensors and actors collaborate together to get the information about the physical environment and perform appropriate actions. In order to provide effective sensing and acting, a distributed local coordination mechanism is necessary among sensors and actors. WSANs have emerged as a variation of WSNs. WSANs are capable of monitoring physical phenomenons, processing sensed data, making decisions based on the sensed data and completing appropriate tasks when needed. WSAN devices deployed in the environment are sensors able to sense environmental data, actors able to react by affecting the environment or have both functions integrated. In this work, we propose a fuzzy-based system for actor node selection in WSNs. In our system, we use 4 input parameters. Different from our previous work, we consider also the actor mobility. The output parameter is Actor Selection Decision (ASD). The simulation results show that the proposed system selects the actor node in order to have short delays, low energy consumption and proper task assignment.
Introduction
Wireless Sensor Networks (WSNs) can be defined as a collection of wireless self-configuring programmable multi-hop tiny devices, which can bind to each other in an arbitrary manner, without the aid of any centralized administration, thereby dynamically sending the sensed data to the intended recipient about the monitored phenomenon [5].
Wireless Sensor and Actor Networks (WSANs), have emerged as a variation of WSNs. WSANs are capable of monitoring physical phenomenons, processing sensed data, making decisions based on the sensed data and completing appropriate tasks when needed. WSAN devices deployed in the environment are sensors able to sense environmental data, actors able to react by affecting the environment or have both functions integrated [6]. For example, in the case of a fire, sensors relay the exact origin and intensity of the fire to actors so that they can extinguish it before spreading in the whole building or in a more complex scenario, to save people who may be trapped by fire.
Unlike WSNs, where the sensor nodes tend to communicate all the sensed data to the sink1
There may be applications with single-sink or multiple-sinks.
Actor–Actor (AA) coordination helps actors to choose which actor will lead performing the task (actor selection), how many actors should perform and how they will perform. Actor selection is not a trivial task, because it needs to be solved in real time, considering different factors. It becomes more complicated when the actors are moving, due to dynamic topology of the network.
In this paper, different from our previous work [10], we propose and implement a simulation system which considers the mobility of actors. The system is based on fuzzy logic and considers four input parameters for actor selection. We show the simulation results for different values of parameters.
The remainder of the paper is organized as follows. In Section 2, we describe the basics of WSANs including research challenges and architecture. In Section 3, we describe the system model and its implementation. Simulation results are shown in Section 4. Finally, conclusions and future work are given in Section 5.
WSAN challenges
Some of the key challenges in WSAN are related to the presence of actors and their functionalities.
Deployment and positioning: At the moment of node deployment, algorithms must consider to optimize the number of sensors and actors and their initial positions based on applications [2,3]. Architecture: When important data has to be transmitted (an event occurred), sensors may transmit their data back to the sink, which will control the actors’ tasks from distance or transmit their data to actors, which can perform actions independently from the sink node [12]. Real-time: There are a lot of applications that have strict real-time requirements. In order to fulfill them, real-time limitations must be clearly defined for each application and system [7]. Coordination: In order to provide effective sensing and acting, a distributed local coordination mechanism is necessary among sensors and actors [12]. Power management: WSAN protocols should be designed with minimized energy consumption for both sensors and actors [15]. Mobility: Protocols developed for WSANs should support the mobility of nodes [1,14], where dynamic topology changes, unstable routes and network isolations are present. Scalability: Smart cities are emerging fast and WSAN, as a key technology will continue to grow together with cities. In order to keep the functionality of WSAN applicable, scalability should be considered when designing WSAN protocols and algorithms [2,14].
WSAN architectures
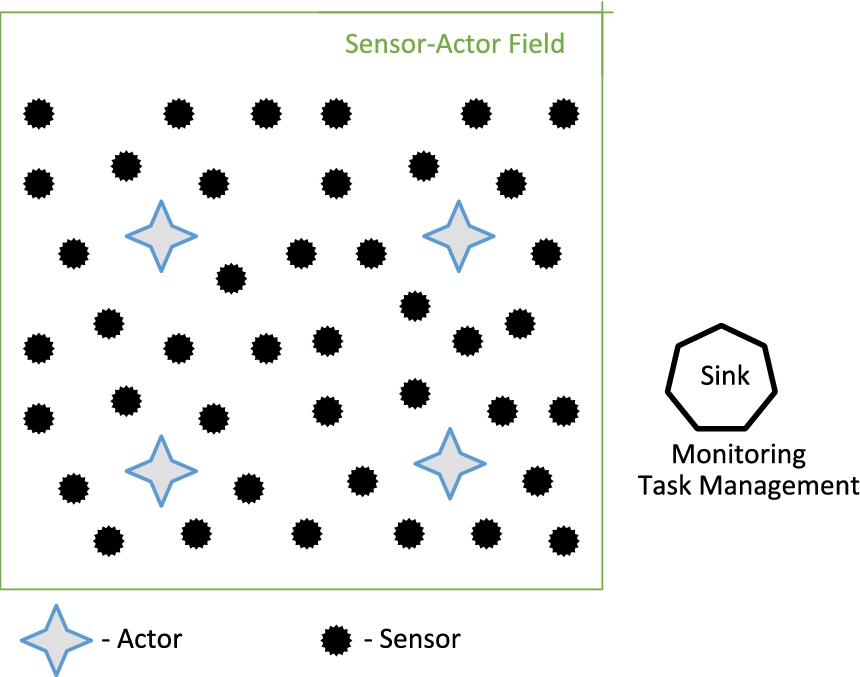
Wireless Sensor Actor Network (WSAN). (Colors are visible in the online version of the article;
A WSAN is shown in Fig. 1. The main functionality of WSANs is to make actors perform appropriate actions in the environment, based on the data sensed from sensors and actors. When important data has to be transmitted (an event occurred), sensors may transmit their data back to the sink, which will control the actors’ tasks from distance, or transmit their data to actors, which can perform actions independently from the sink node. Here, the former scheme is called semi-automated architecture and the latter one fully-automated architecture (see Fig. 2). Obviously, both architectures can be used in different applications. In the fully-automated architecture are needed new sophisticated algorithms in order to provide appropriate coordination between nodes of WSAN. On the other hand, it has advantages, such as low latency, low energy consumption, long network lifetime [6], higher local position accuracy, higher reliability and so on.

WSAN architectures. (a) Fully-automated; (b) Semi-automated. (Colors are visible in the online version of the article; https://dx-doi-org.web.bisu.edu.cn/10.3233/JHS-150505.)
Problem description
After data has been sensed from sensors, they are collected to the sink for semi-automated architecture or spread to the actors for fully-automated architecture. Then a task is assigned to actors. In general, one or more actors take responsibility and perform appropriate actions. Different actors may be chosen for acting, depending on their characteristics and conditions. For example, if an intervention is required in a building, a flying robot can go there faster and easier. While, if a kid is inside a room in fire, it is better to send a small robot. The issue here is which of the actors will be selected to respond to critical data collected from the field (actor selection).
If WSAN uses semi-automated architecture, the sinks are used to collect data and control the actors. They may be supplied with detailed information about actors characteristics (size, ability etc.). If fully-automated architecture is being used, the collected data are processed only by actors, so they first have to decide whether they have the proper ability and right conditions to perform. Soon after that, actors coordinate with each-other, to decide more complicated procedures like acting multiple actors, or choosing the most appropriate one from several candidates. In this work, we propose a fuzzy-based system in order to select an actor node for a required task.
System parameters
Based on WSAN characteristics and challenges, we consider the following parameters for implementation of our proposed system.
Job Type (JT): A sensed event may be triggered by various causes, such as when water level passed a certain height of the dam. Similarly, for solving a problem, actors need to perform actions of different types. Actions may be classified regarding time duration, complexity, working force required etc., and then assign a priority to them, which will guide actors to make their decisions. In our system TRA is defined by five levels of difficulty. The hardest the task, the more likely an actor is to be selected.
Distance of Actor from Job Place (DAJP): The number of actors in a WSAN is smaller than the number of sensors. Thus, when an actor is called for action near an event, the distance from the actor to the event is different for different actors and events. Depending on three distance levels, our system takes decisions on the availability of the actor node.
Remaining Energy of Actor (REA): As actors are active in the monitored field, they perform tasks and exchange data in different ways from each other. Consequently, also based on their characteristics, some actors may have a lot of power remaining and other may have very little, when an event occurs. We consider three levels of RP for actor selection.
Actor Node Speed (ANS): It is obvious that in an heterogeneous WSAN, actors are of different types and may operate in different environments. So, in order to judge the mobility degree of an actor, the system uses the speed of an actor.
Actor Selection Decision (ASD): Our system is able to decide the willingness of an actor to be assigned a certain task at a certain time. The actors respond in five different levels, which can be interpreted as:
Strong Not Select – It is not worth assigning the task to this actor. Not Select – There might be other actors which can do the job better. Select Not Select – The actor is ready to be assigned a task, but is not the “chosen” one. Select – The actor takes responsibility of completing the task. Strong Select – Actor has almost all required information and potential and takes full responsibility.
System implementation
Fuzzy sets and fuzzy logic [16] have been developed to manage vagueness and uncertainty in a reasoning process of an intelligent system such as a knowledge based system, an expert system or a logic control system. In this work, we use fuzzy logic to implement the proposed system.
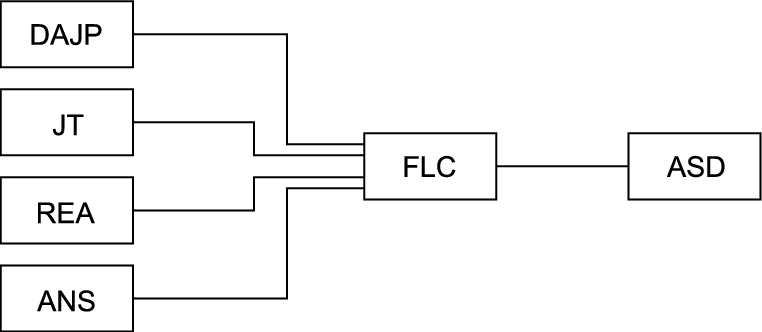
Proposed system structure.
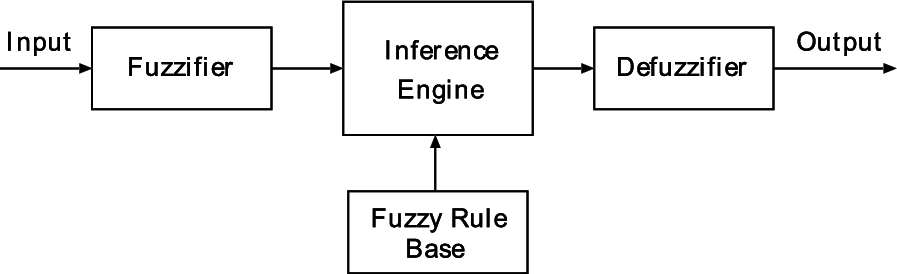
FLC structure.
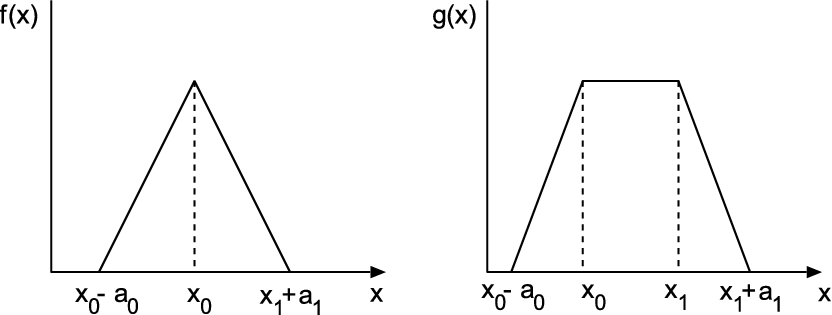
Triangular and trapezoidal membership functions.
The structure of the proposed system is shown in Fig. 3. It consists of one Fuzzy Logic Controller (FLC), which is the main part of our system and its basic elements are shown in Fig. 4. They are the fuzzifier, inference engine, Fuzzy Rule Base (FRB) and defuzzifier.
As shown in Fig. 5, we use triangular and trapezoidal membership functions for FLC, because they are suitable for real-time operation [13]. The
We use four input parameters for FLC:
Job Type (JT);
Remaining Energy of Actor (REA);
Distance of Actor from Job Place (DAJP);
Actor Node Speed (ANS).
The term sets for each input linguistic parameter are defined respectively as shown in Table 1.
The output linguistic parameter is the Actor Selection Decision (ASD).
Parameters and their term sets for FLC
Parameters and their term sets for FLC
FRB of proposed fuzzy-based system

Fuzzy membership functions. (a) ANS; (b) DAJP; (c) JT; (d) REA; (e) ASD.
Results for

Results for
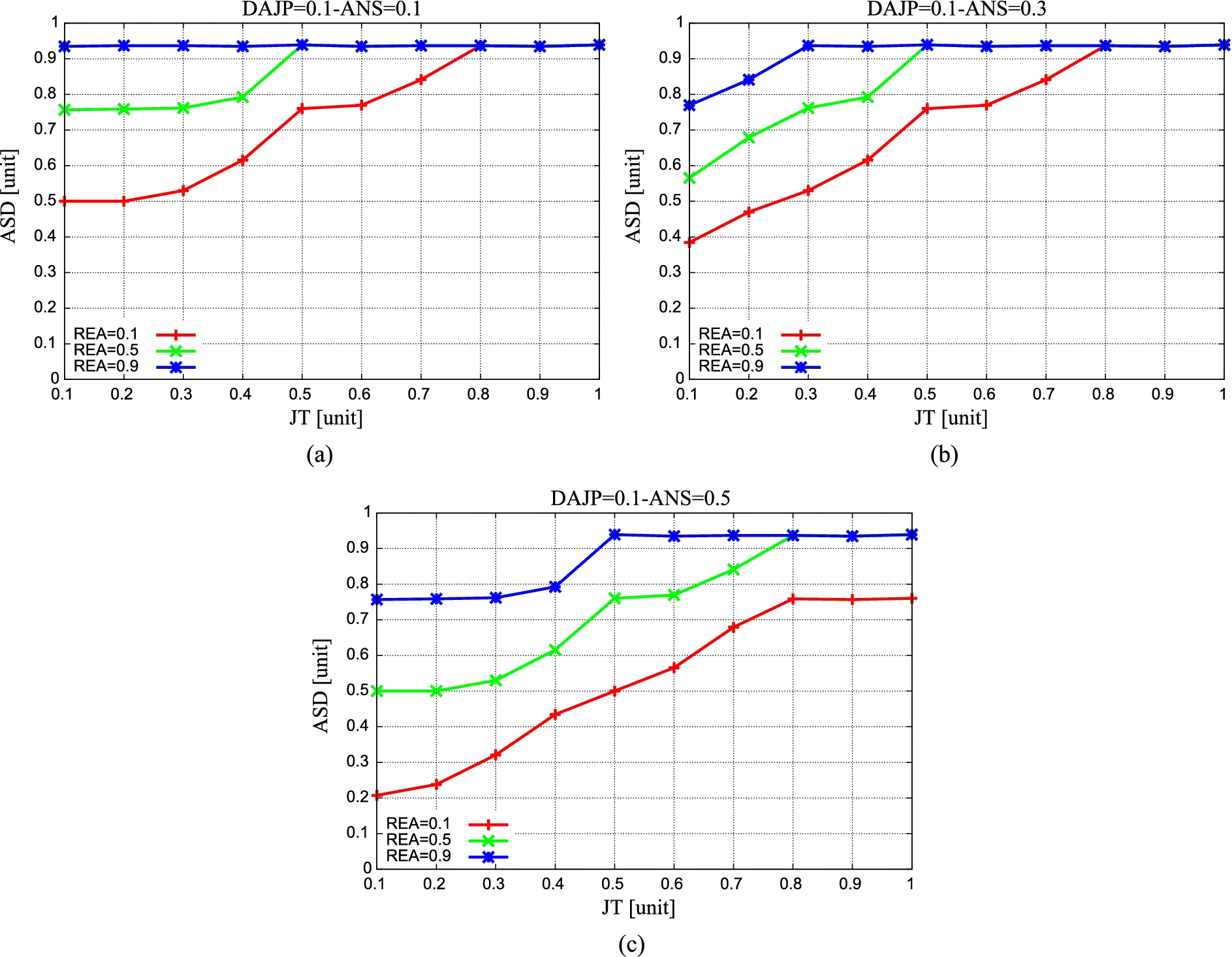
We present the simulation results in Figs 7, 8 and 9. From results in general, we notice that as JT becomes difficult the ASD becomes higher because actors are programmed for different jobs. The DAJP defines the distance of the actor from the job place, so when DAJP is small, the ASD is higher. The actors closest to the job place use less energy to reach the job position. We also notice that for each value of DAJP, when the ANS increases the network topology is more dynamic. In this condition, the actor may loose connectivity and changes its condition (such as distance from job place) in a while, so it will be not reachable any more. But, the actor is moving with higher speed, the response can be faster for emergency situations.
Conclusions and future work
The main challenges for WSANs have to do with node coordination, energy management and mobility. A WSAN can be implemented as semi-automated architecture (which is similar to WSN) and fully-automated architecture (which is the real challenge of embedded WSANs). In this paper, we proposed and implemented a mobility-aware fuzzy-based simulation system for WSAN, which considers 4 parameters to select an actor node for a required task in the network. The system selects the actor node in order to have short delays, low energy consumption and proper task assignment.
In the future work, we will consider also other parameters for actor selection and make extensive simulations to evaluate the proposed system.

Results for