
Abstract
The remote surveillance and tracking of vehicles on roads is generally achieved by means of a network of sensors deployed along the roadside. The effectiveness of such networks depends fundamentally on the precision with which the sensor locations are known Global Positioning Systems provide an effective means of pinpointing the sensor locations. However, such systems are expensive, and are therefore impractical for large-scale sensor deployment. Accordingly, this paper proposes a low-cost sensor localization service based on binary detection information and a road map. In the proposed algorithm, the sensors are classified as either intersection nodes or non-intersection nodes in accordance with the stochastic characteristics of the binary detection information. Having identified all of the non-intersection nodes along each road segment, the intersection nodes are connected with the non-intersection nodes by means of a clustering technique. Finally, the positions of the roadside sensors are identified by mapping the clustered sensors to the known road map. The simulation results show that the proposed algorithm outperforms existing localization algorithms reported in the literature.
Introduction
The localization of roadside sensors is an important requirement for the effective functioning of road network applications such as remote vehicle surveillance and tracking [1,7,10]. Before locating these roadside sensors, an efficient sensor deployment is needed and some works use unmanned aerial planes to drop wireless sensors onto the target road network [5,22]. Existing localization schemes are typically based on information such as the vehicle id, the vehicle speed, or the vehicle direction. However, acquiring this information requires the use of sophisticated hardware such as GPS transmitters/receivers or ranging devices. Such equipment is expensive, and is therefore impractical for large-scale sensor deployment. Accordingly, a requirement exists for alternative, low-cost solutions for roadside sensor localization.
Nowadays, there are many existing localization schemes, which are usually developed based on either range measurement techniques [23–25,27] or the sharing of connectivity information [20,21]. One of the most common range measurement techniques, Time-difference-of-arrival (TDOA) [25], uses a location-support system to facilitate in-built, mobile, location-dependent applications. In such an approach, mobile or static sensors determine their locations by analyzing the temporal characteristics of the signals received from multiple beacons distributed throughout the target environment. For the sharing of connectivity information, the Ad Hoc Positioning System proposed in [20], some of the sensors have the ability to determine their locations directly (e.g., via GPS), while the remainder determine their locations by analyzing the Angle of Arrival (AOA) of the signals emitted by the sensors with a known location. Besides, in [3], the authors proposed a RF-based localization scheme for small, low-cost devices in unconstrained outdoor environments. In the proposed approach, the receivers (sensors) localized themselves with a high confidence to the centroid of a set of proximate reference points using a simple connectivity metric. In Approximation Point-In-Triangulation Test (APIT) [13], a range-free localization scheme, the network environment is isolated into overlapping triangular regions between a small number of GPS-equipped devices (anchors). By examining the triangular regions to which they belong, the sensors are able to approximate the area of the network within which they reside. By further inspecting the coordinates of the triangle vertices (i.e., the anchors), the sensors reduce the diameter of the estimated area in which they reside, and obtain a good location estimate as a result. In [17], the authors proposed a range-independent localization algorithm designated as SeROC to enable sensors to determine their position in un-trusted environments with the assistance of a small number of trusted entities. In [19], a probabilistic localization method based on robust quadrilaterals was proposed for sensor localization without the need for beacons or anchors.
In addition to the methods presented above, the literatures also contain various active event-driven localization algorithms [26,31,32,38]. Basically, these algorithms create artificial events using an event scheduler and then analyze these events in order to estimate the sensor location. However, for such algorithms to function, the sensors must be fitted with special hardware such as event generators or optical retro-reflectors [32,38]. As a result, while such methods yield an effective localization performance, they are economically unviable for large-scale deployment. In addition, many of the schemes presented in the literatures [3,13,17,19–21,23–25,27] require the sensors to exchange local information in order to derive their global positions. Thus, to achieve a satisfactory localization performance, a dense deployment of sensors is required. However, in many environments, such a deployment is not feasible due to cost constraints or difficulties in physically deploying the sensors. As a result, the localization performance of these schemes is inevitably degraded. Recently, other more localization algorithms in sensor networks are proposed and please refer to literatures [4,6,8,9,18,28,30,33,34,36,37].
For sensor localization in sparse networks, the literatures contain two basic proposals. In the first approach, mobile anchor nodes fitted with GPS technology follow a predetermined route through the network, and the sensors determine their locations from the beacon messages broadcast by these anchors as they travel [11,12,29]. In the second approach, a distance vector (DV) exchange is performed such that all of the nodes in the network can obtain their minimum distance (in hops) to the anchors. The average hop size is then estimated and deployed as a correction to all the nodes in the network. Finally, the unknown sensor positions are estimated via triangulation or minimum likelihood estimation [35].
In our study, we focus on car surveillance or target tracking on roads (e.g. battlefield), in which sensors are commonly deployed on the roadside. The location of road-side sensors is an important determinant of the effectiveness of such a sensor surveillance system. The effectiveness of such networks depends fundamentally on the precision with which the sensor locations are known GPS or vehicle identification device, ranging device or so forth provide an effective means of pinpointing the sensor locations. However, such systems are expensive, and are therefore impractical for large-scale sensor deployment. Accordingly, this study proposes a low-cost localization service for roadside sensors without the need for GPS or vehicle identification devices. In the proposed approach, the roadside sensors perform a binary detection of the passing vehicles and the sensor locations are then identified on a known map via a statistical analysis of the detection timestamps. It classifies sensors as intersection or non-intersection nodes by analyzing the stochastic characteristics of the obtained information on the binary detection of vehicles. After identifying the non-intersection nodes for each road segment, the algorithm connects the intersection nodes with the non-intersection nodes by means of clustering. Furthermore, the proposed algorithm filters the clustered sensors by using a road map, and thereby, determines the positions of road-side sensors.
The remainder of this paper is organized as follows. Section 2 presents the background to the localization problem considered in this study and describes the related research. Section 3 describes the localization scheme proposed in this study. Section 4 compares the localization performance of the proposed scheme with that of an existing localization method by means of numerical simulations. Section 5 discusses the performance of the proposed localization algorithm in large-scale networks and makes a comparison of the computational complexities of APL and the proposed algorithm. Finally, Section 5 presents some brief concluding remarks.
Background and related work
Time difference on detection
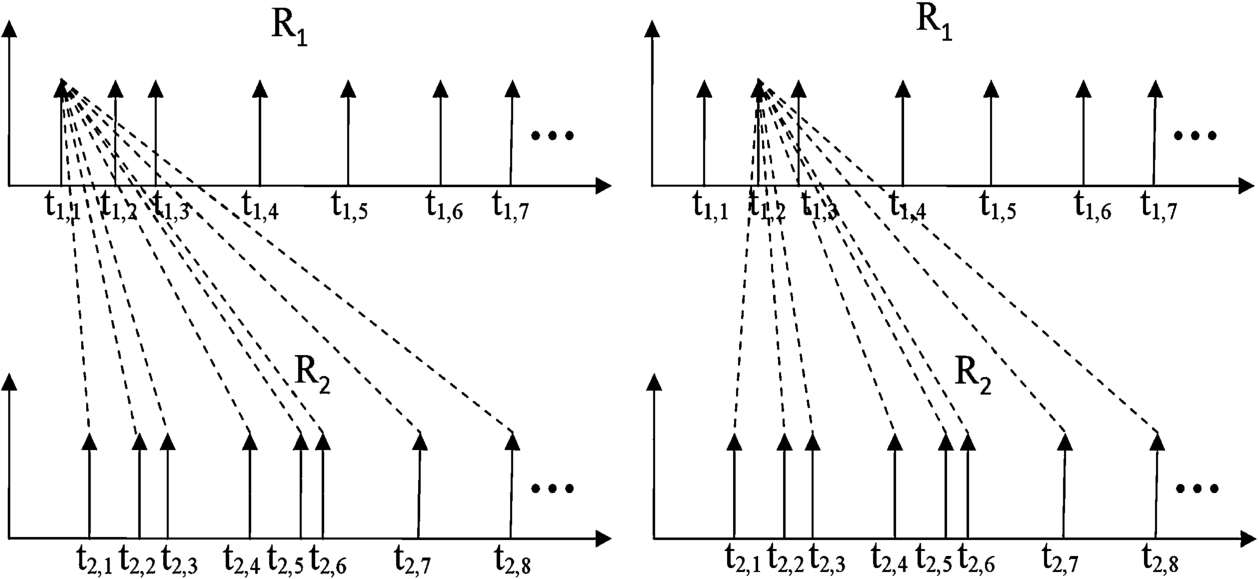
In the Time Difference on Detection (TDOD) algorithm [14], sensor localization is achieved by estimating the time difference on detection between two neighboring sensors. In their proposed approach, the vehicle arrival patterns recorded by any sensor are statistically maintained at the neighboring sensors, and the road segment length, i.e., the distance between the two sensors, is estimated from the time taken by the vehicles to move between the two sensors (i.e., the movement time) and the speed limit of the particular road segment.
Time difference on detection operation for sensors
Time difference for two nighobring sensors.
Figure 1 shows the TDOD operation performed at the localization server for two sensors
Once the localization server has performed TDOD estimation for the two timestamp sequences received from
In the Autonomous Passive Localization (APL) scheme [14], the distance between each pair of roadside sensors is estimated from vehicle-detection timestamps, and a virtual graph is then constructed composed of sensor IDs (i.e., the vertices) and distance estimates (i.e., edges). The graph is then mapped to the corresponding road map in order to estimate the physical position of each sensor. For APL to function correctly, the sensors must be time-synchronized and have a binary vehicle detection capacity such that ranging or GPS devices are not required. Furthermore, the road map corresponding to the observed network must be available to the APL server. Finally, the mean vehicle speed must be close to the speed limit of the road.
In APL, each sensor sends its vehicle-detection timestamps together with its ID to the APL server. The server then performs a TDOD operation for all the sensors and estimates the distances between each pair of sensors. The APL server then estimates the movement time of the edge (i.e. distance between two arbitrary nodes) or path as the maximum count of the TDOD operation for the corresponding nodes. Finally, by assuming a mean vehicle speed close to the speed limit of the road, the APL server calculates the length of the edge or path between the two sensors.
In the subsequent fine-tuning phase, APL uses a minimum spanning tree and the relative deviation errors to filter out the less likely paths and it constructs a virtual graph comprising all possible edges. Typically, the edge estimates are more accurate than the path estimates. In addition, the APL algorithm uses the ratio of the standard deviation to the mean of TDOD to eliminate erroneous distance estimates when constructing the virtual graph. Finally, the physical location of each sensor is determined by mapping the permutation matrix of the reduced virtual graph onto the real graph (i.e., the road map).
Statistical tests
A statistical test [15] is a mechanism for making quantitative decisions about a process (or set of processes). Through the analysis of experimental data, a statistical test can determine whether or not there is sufficient evidence to reject a particular hypothesis about a given process. In the localization method proposed in this study, statistical tests are used to examine the similarity between the parameters of the observed populations.
When performing a statistical test, it is first necessary to clearly state the null hypothesis H0 and the alternative hypothesis H1 (i.e., the hypothesis contrary to the null hypothesis). Only when the sample information provides sufficient evidence can the null hypothesis be rejected. The level of significance α, which represents the probability that the null hypothesis will be rejected, indicates the risk taken by rejecting the null hypothesis. The lower the value of α, the more accurate the test. A critical value which represents the boundary for the possible rejection of the null hypothesis can be determined from the level of significance. If the test statistic is less than this critical value, the null hypothesis is rejected. Consequently, the test itself can determine whether or not the null hypothesis should be rejected.
When performing statistical tests, a so-called Type 1 error may occur, in which the null hypothesis is incorrectly rejected (i.e., false positive error). The probability of a Type I error is equal to the significance level, α. That is,
The present study utilizes two statistical tests to examine the parameter relationship of the observed vehicle-detection timestamps. Specifically, the F-test [15] is used to check for a statistical difference in the variances of two arbitrary TDOD values. In addition, the T-test [15] is used to check for statistical differences in the means of the vehicle inter arrival times at two arbitrary sensors.
Sensor localization scheme with passive information
System model
The proposed localization scheme is based on the following assumptions: (1) the roadside sensors have no ranging or GPS devices and can sense vehicles only via binary detection. (2) The sensors are sparsely deployed and they are connected via off-the-road sensors. (3) The roadside sensors are uniformly distributed. (4) No two roadside sensors can sense one another. (5) The sensors are time-synchronized at the millisecond level. (6) Each sensor detects passing vehicles and generates a corresponding vehicle-detection timestamp in the form of a tuple
The following terms are defined in order to facilitate a description of the proposed localization algorithm:
Sensors deployed at an intersection and having more than two neighboring sensors (e.g. Sensors 1–6 in Fig. 3).
Sensors deployed at non-intersection points and having a maximum of two neighboring sensors (e.g. Sensors 7–50 in Fig. 3).
Non-intersection nodes in the same road segment which have not yet been ordered.
Non-intersection nodes within the same road segment which have been ordered (e.g., Sensors 7–9 in Fig. 3).
Nodes at the end of a non-intersection chain (e.g., Sensors 7, 26, 27 and 46 in Fig. 3).

Sensors in road network model.
The localization algorithm proposed in this study determines the physical locations of the sensor nodes using only the information provided by the vehicle-detection timestamps. In the proposed approach, each sensor sends its vehicle-detection timestamps and ID to the localization server. The server then analyzes the properties of the vehicular traffic on the basis of the information collected from all the sensors and classifies the sensors into two groups, namely non-intersection node clusters and intersection nodes. The server analyzes the relationship between each pair of sensors in the same non-intersection node chain in accordance with their interarrival time processes and timestamp series; and then constructs an ordered non-intersection chain. In addition, the server estimates the two endpoint non-intersection nodes in each road segment and connects these nodes to the adjacent intersection nodes. By repeating this process for each of the road segments the server gradually constructs a virtual graph of the entire sensor network. Finally, the server maps the virtual graph to the known road map in order to estimate the position of each sensor.
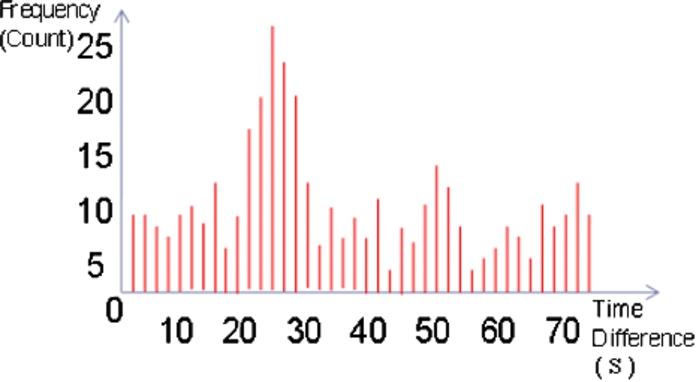
In the road segment classification phase, the localization algorithm uses the vehicle detection-timestamp information obtained from the sensors and then classifies the sensors accordingly. In general, every road segment has distinct traffic properties. Thus, sensors in different road segments detect different traffic patterns. Within the same road segment, the information collected by the various sensors exhibits obvious characteristics in the random process. By contrast, different road segments are characterized by distinctly different random properties.
The same pattern of TDOD in different road segments.
The same pattern of TDOD in same road segment.
As shown in Figs 4 and 5, the TDOD measurements between two sensors in the same road segment have a strong correlation, while those between two sensors in different road segments have a weak correlation. Therefore, the localization server commences by calculating the TDOD value (i.e., Eq. (1)) for each pair of sensors in the road network, and then performs a statistical test (i.e., F-test) to determine whether or not a statistical difference exists in the TDOD variances of different sensor pairs. Note that the TDOD variance
Note that an F-test can be used only if the standard deviations of the two considered populations are equal (i.e.,

Road Segment Classification
The proposed localization algorithm orders the sensors within each non-intersection cluster by comparing the random properties of their interarrival processes and timestamp series. Due to differences in the vehicle speed, rate of acceleration/deceleration, direction of travel, and so forth, the vehicle movements within the network can be modeled as a random process. The interarrival time of the vehicles at each sensor reflects the elapsed time between the passage of two successive cars past the same sensor. For a given road segment, the random properties of the timestamp information generated at each non-intersection sensor are similar to those of the timestamp information generated at its neighboring sensors. Furthermore, the similarity between the random properties of the two sets of timestamp information increases as the distance between the two sensors reduces. For example, if non-intersection sensor A detects a high vehicle density, its neighboring sensor B will also in all probability detect a high vehicle density.
Assume that a total of n sensors exist in the observed road network. Furthermore, assume that the vehicle interarrival times at each sensor form a random sequence. Let m elements be chosen from each random sequence. (Note that a larger value of m can ensure a lower error.) The m elements associated with the n sensors can be evaluated to build n vectors, as shown in Fig. 6.
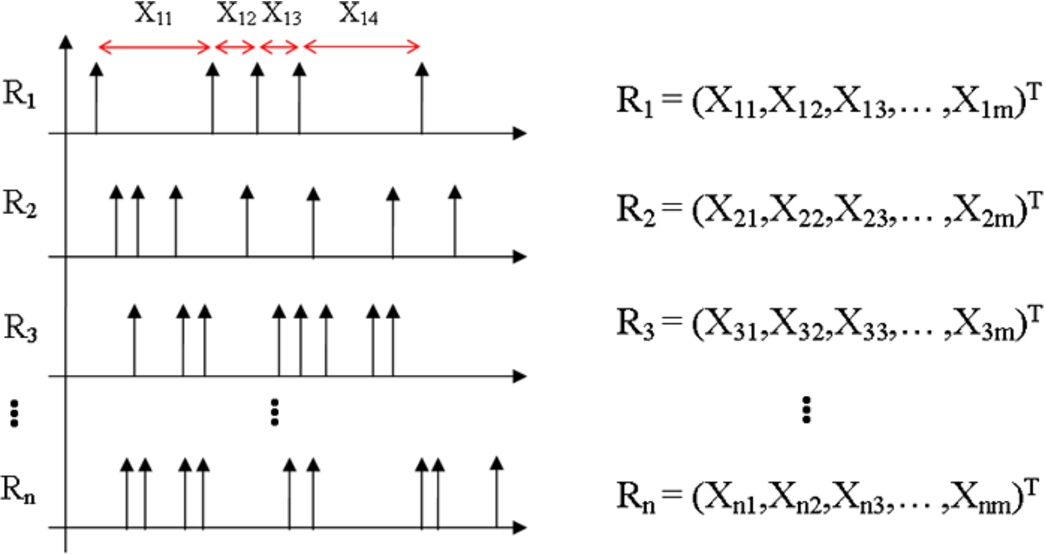
Sensors’ interarrival time.
In the localization algorithm proposed in this study, the means of the random vectors are examined via a two-sample T-test (i.e., Eq. (6)) in order to determine whether or not they are equal. Note that the two means are taken to be equal if the T-test cannot reject the null hypothesis.
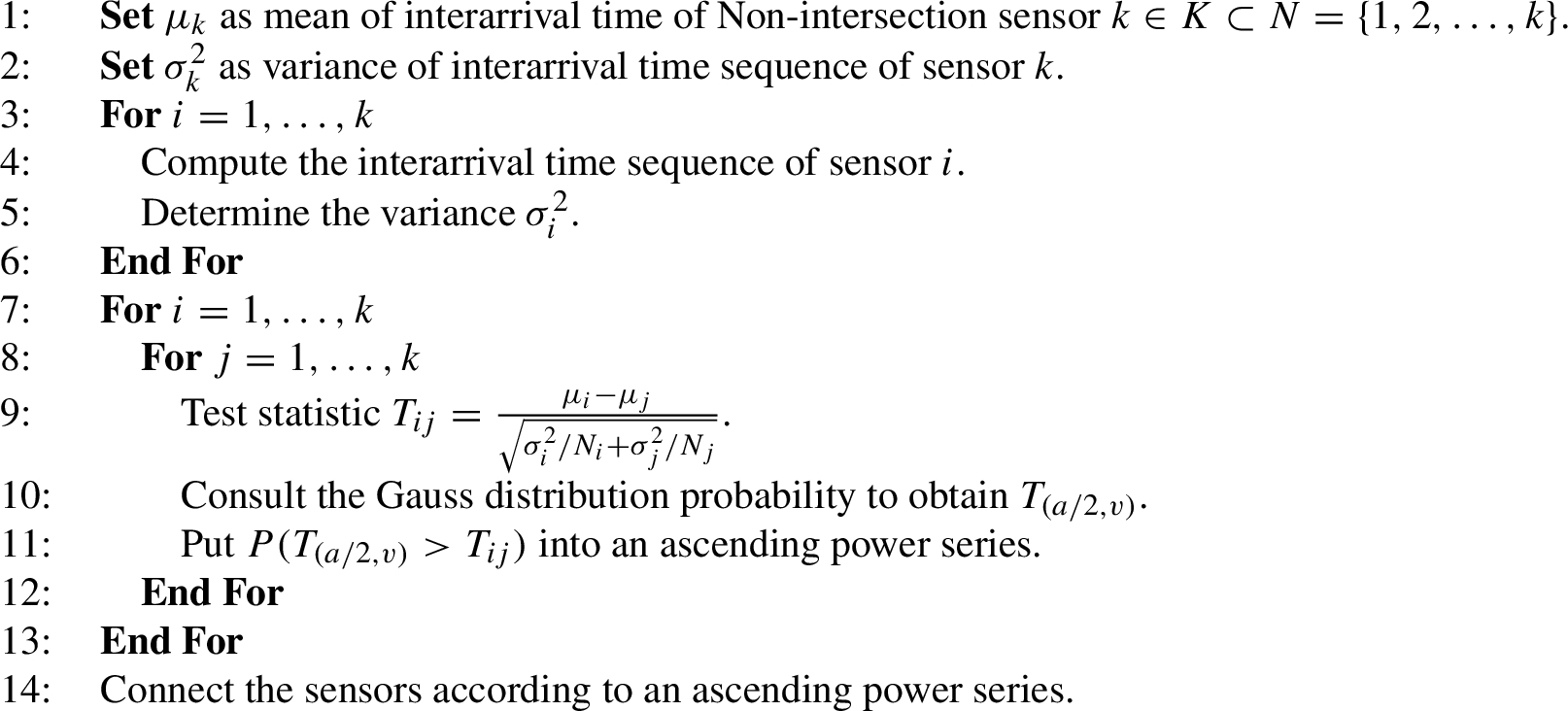
Ordering Non-intersection Nodes (mean)
In addition to the means analysis described above, the covariance of the interarrival time series between two sensors is also examined to test for similarity between the two random processes. The interarrival time series at two neighboring nodes have similar waveforms. Moreover, the degree of similarity between the covariance of the two time series increases as the distance between the two sensors reduces. In the proposed localization algorithm, the random process is partitioned into small intervals (i.e., hourly time windows), and the covariance of the two random processes evaluated accordingly.
Note that by combining the mean and covariance procedures, a greater classification accuracy is obtained.
In constructing the virtual graph of the sensor network, the localization algorithm searches for all the neighboring sensors of each intersection node in order to localize the node on the corresponding road segment. The non-intersection node chains are then connected to the intersection nodes, thereby forming a virtual graph. Finally, the virtual graph is mapped to the known road map in order to localize the position of each sensor.
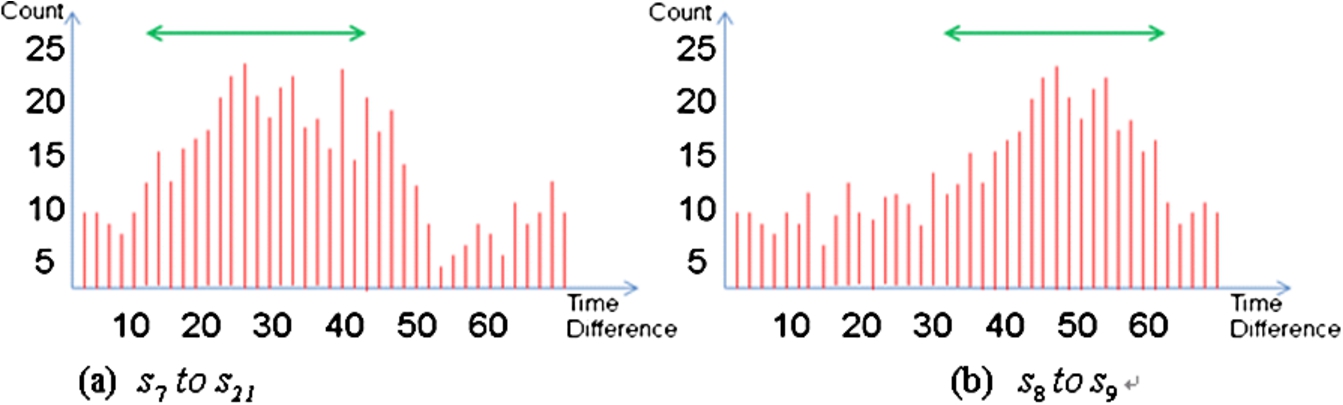
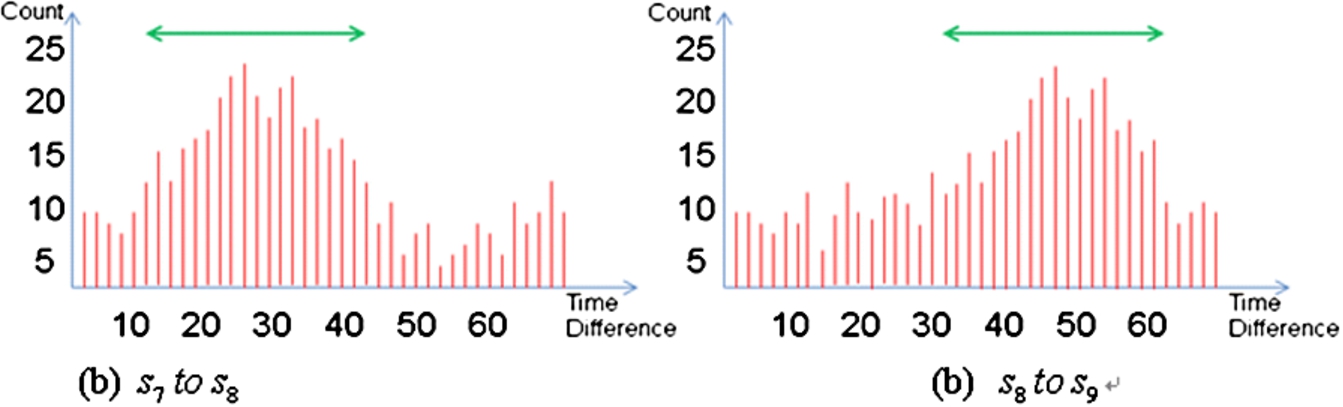
An intersection node receives traffic information from neighboring endpoint non-intersection nodes. As shown in Fig. 7, the interarrival time at an intersection node are related to the interarrival time at the neighboring endpoint non-intersection nodes. Thus, the timestamps of the non-intersection nodes are merged into a new random vector, which is then compared the random vector of the intersection node. By selecting the appropriate non-intersection nodes for comparison with the corresponding intersection node, a high correlation can be obtained.
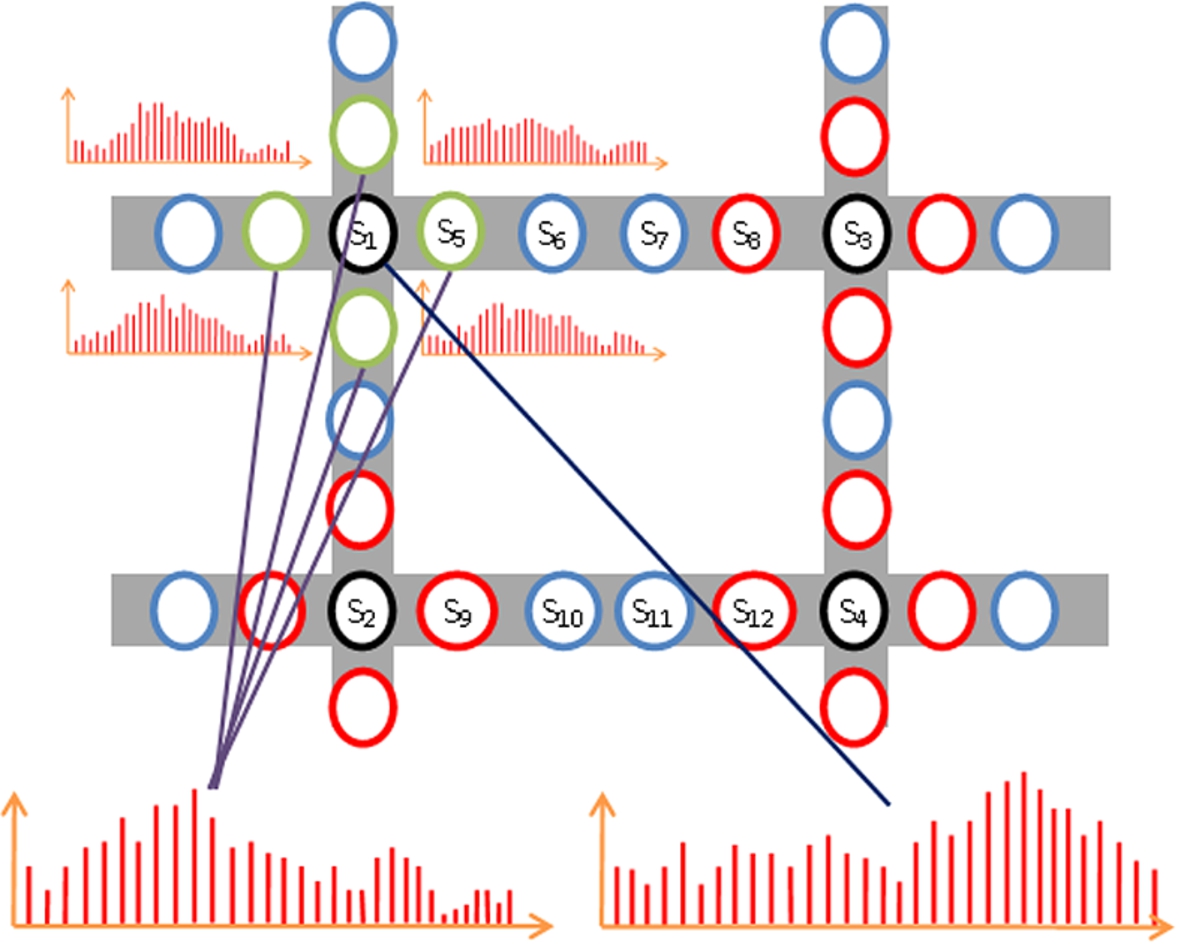
Correlation between intersection and endpoint non-intersection nodes.
Depending on the type of intersections, this algorithm first selects several random vectors corresponding to non-intersection nodes and then sums these vectors to form a new random vector. In practice, the target area may actually contain multiple types of intersection. Therefore, in constructing the virtual graph, the algorithm commences by identifying the different types of intersection within the selected area, and then connects the endpoint non-intersection nodes and intersection nodes in descending order of intersection complexity. For example, suppose that the selected area contains two 5-way intersections, ten 4-way intersections, and one 3-way intersection. The algorithm searches first for five endpoint nodes for each intersection node, and connects the endpoint nodes and the intersection node each time a match is obtained. When no further 5-way intersections can be found, the algorithm searches for four nodes for each intersection node, and constructs the virtual graph accordingly. The process is then repeated to construct the graph for the 3-way intersection.
The new random vector is partitioned into time windows and the number of timestamps in each time window is evaluated. The timestamp numbers are taken as the value of the time windows, and collectively form a random sequence. The localization algorithm then utilizes the same approach to construct a random sequence based on the timestamps generated at the intersection node. Finally, the algorithm determines the covariance (i.e., Eq. (7)) of the two random sequences and normalizes the result to obtain the correlation coefficient shown in Eq. (8).
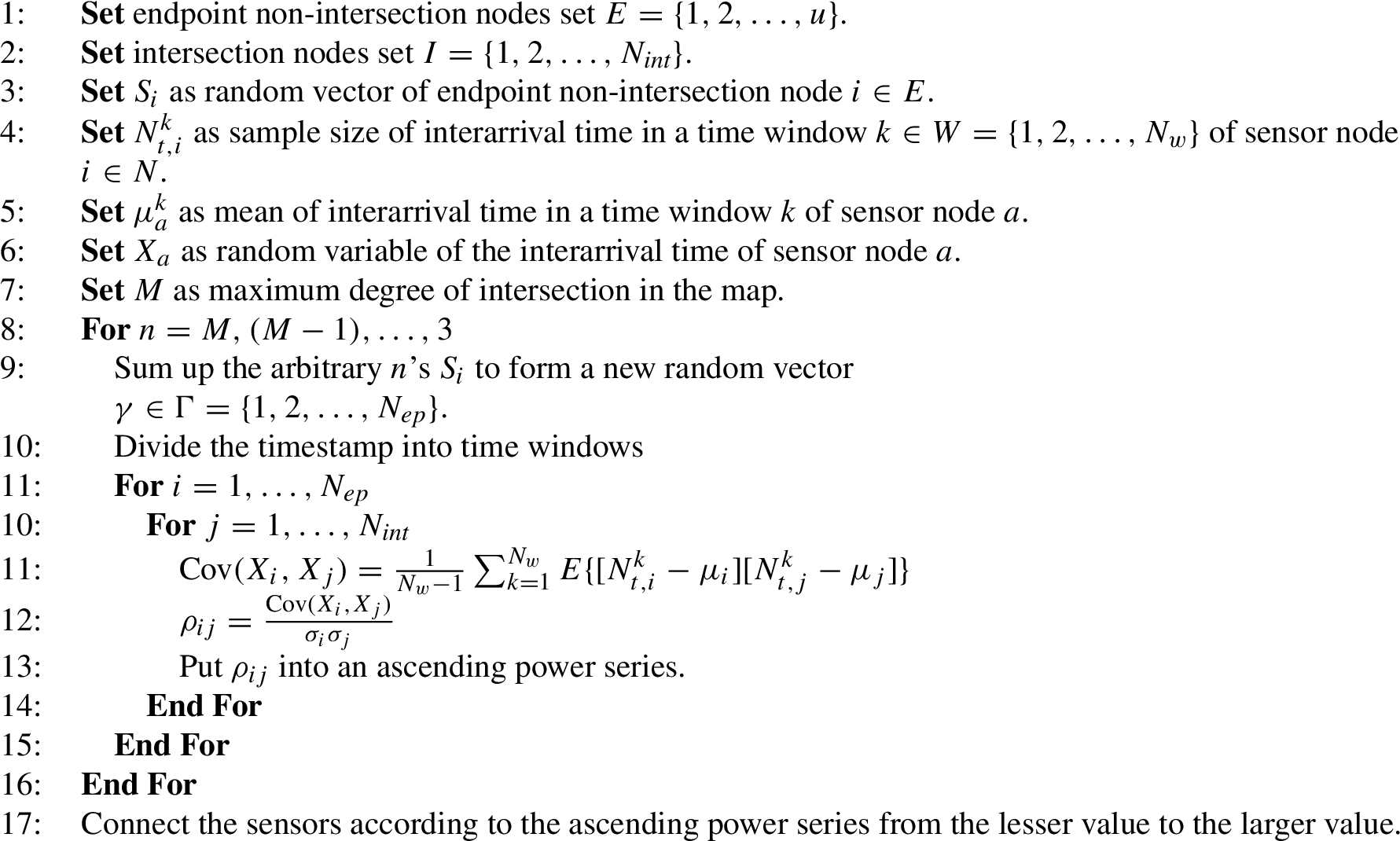
Connecting Virtual Graph
It is noted that the computational cost of the localization algorithm is dependent on the window size. Specifically, a larger window size results in a greater localization precision, but incurs a greater computational cost. Therefore, a tradeoff must be realized between the precision of the localization process and the computational cost. In the present study, the window size is set to one hour because different hours in the day are often associated with different traffic patterns (e.g., traffic jams in rush hour periods, free-flowing traffic in off-peak hours, and so on). As discussed previously, the level of significance α, i.e., the probability of the null hypothesis is rejected. Specifically, a lower value of α indicates a greater accuracy of the statistical test. In this study, α is assigned the conventional value of 0.05.
In this section, the performance of the proposed localization algorithm is compared with that of APL by means of numerical simulations performed on the Opportunistic Network Environment (ONE) simulator [16]. The simulations involved 20 ∼ 120 sensors and 100 vehicles. The vehicles randomly chose their own directions and followed the shortest paths to their destinations. Each road segment was assigned a particular speed limit (maximum speed limit: 65 km/h). The speeds of the vehicles traveling along each segment were uniformly distributed in the interval of (45 km/h, speed limit assigned to road segment). The simulations were performed using the Manhattan street model [2] with a road segment length of 500 m (see Fig. 8). The parameters used in performing the simulations are summarized in Table 1. The error ratio (out of set of predefined sensor locations) which forms the basis of performance evaluation of the simulation is the number of localization error sensors divided by total number of sensors.
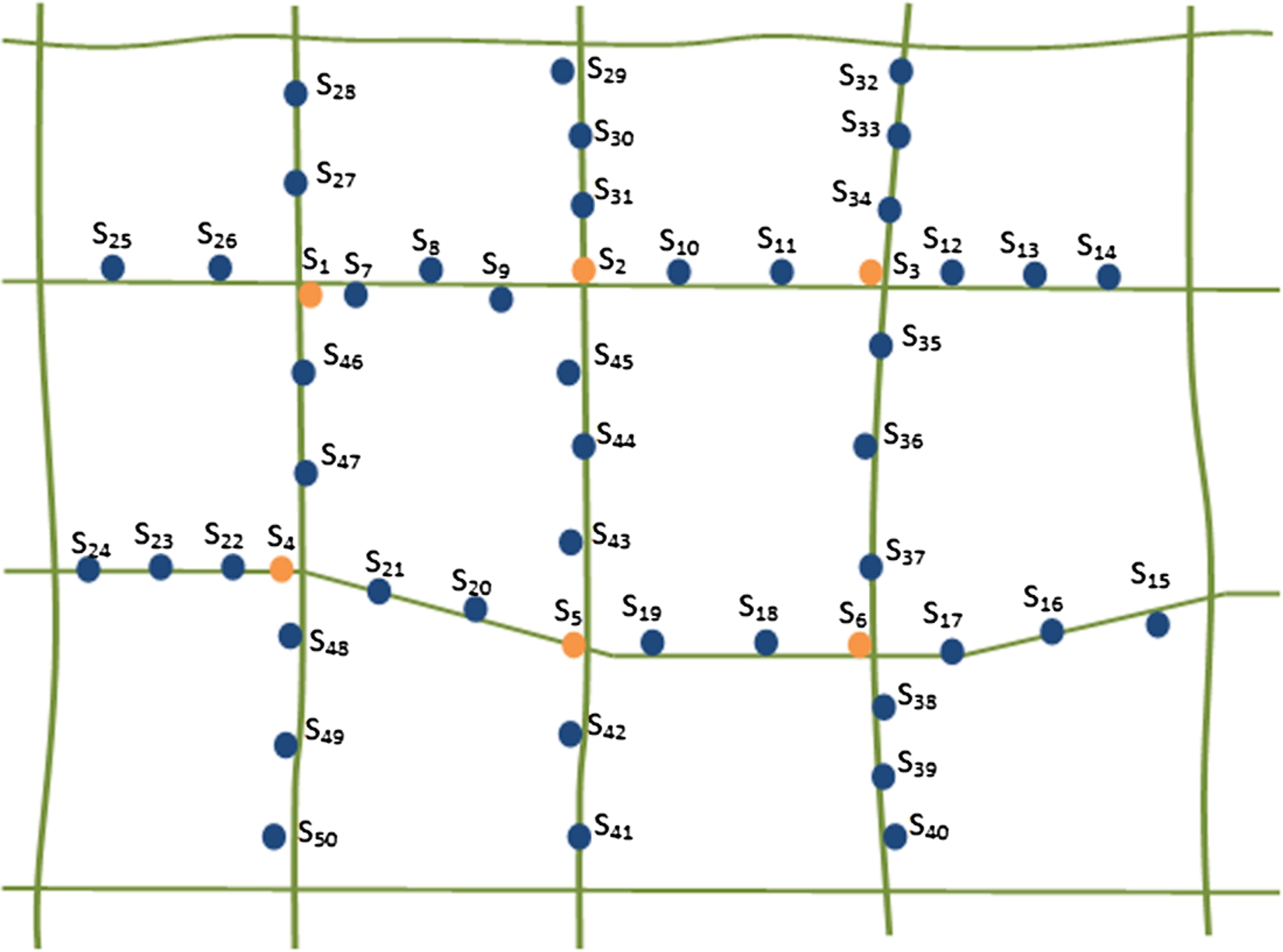
Simulation road network.
Simulation Setup
Figure 9 shows the performance of the proposed localization algorithm at given speed deviation (i.e., speed difference). As shown, the error ratio reduces with an increasing speed difference. Since the proposed algorithm is based on binary detection random processes, a high speed deviation results in the acquisition of different detection patterns at sensors located in different positions.
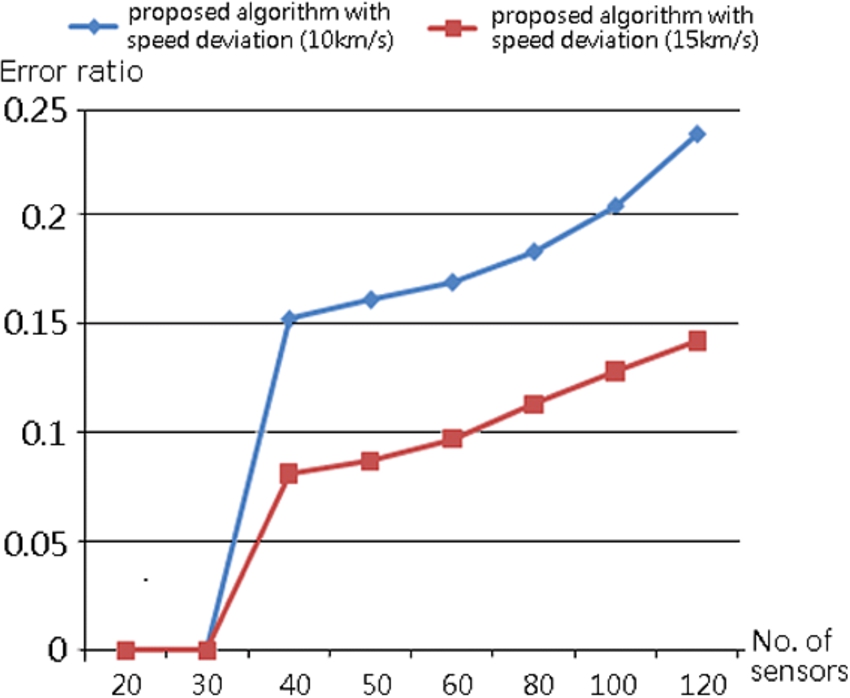
Error ratio on proposed algorithm.
The traffic behavior in an urban environment is more complicated than that in a military environment. That is, the vehicles may randomly stop at some point along a road segment or may suddenly begin to move from a stopped state. Such events add redundant timestamp values (i.e., noise) to the observed timestamp series. Thus, to improve the performance of the localization process, it is necessary to enlarge the sample size (i.e., vehicle detection-timestamp information); thereby reducing the ratio of redundant timestamp information to useful timestamp information.
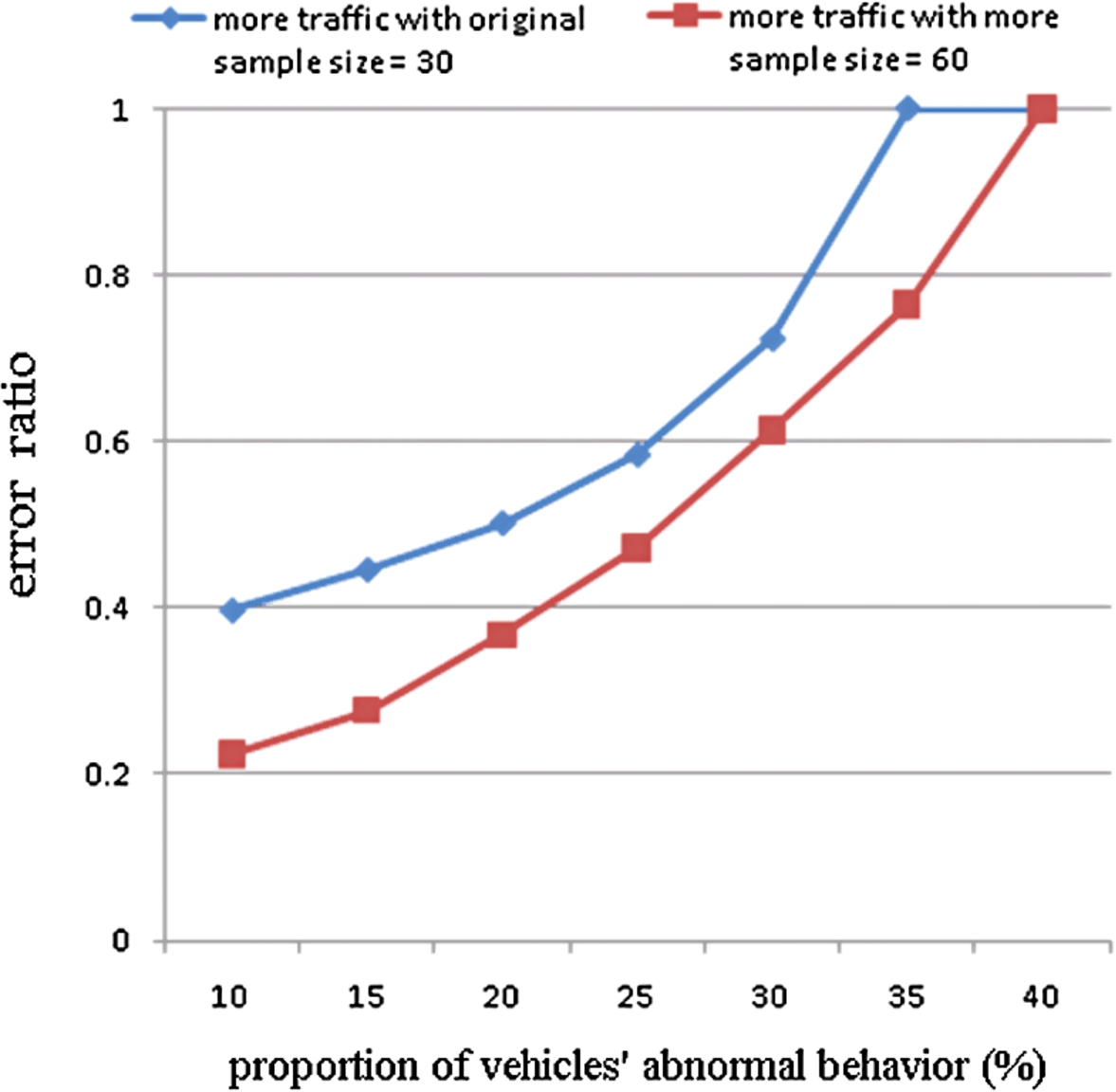
Error ratio with different proportions of noise (vehicles’ abnormall behavior).
Figure 10 shows the performance of the proposed algorithm given different sample sizes for the case where 10–30% of the cars randomly stop and start. It is seen that the error ratio increases exponentially with an increasing amount of noise (i.e., vehicles’ abnormall behavior). However, the localization performance improves with an increasing sample size. Figure 11 shows that the localization error reduces with an increasing vehicle density due to the corresponding increase in the sample size.
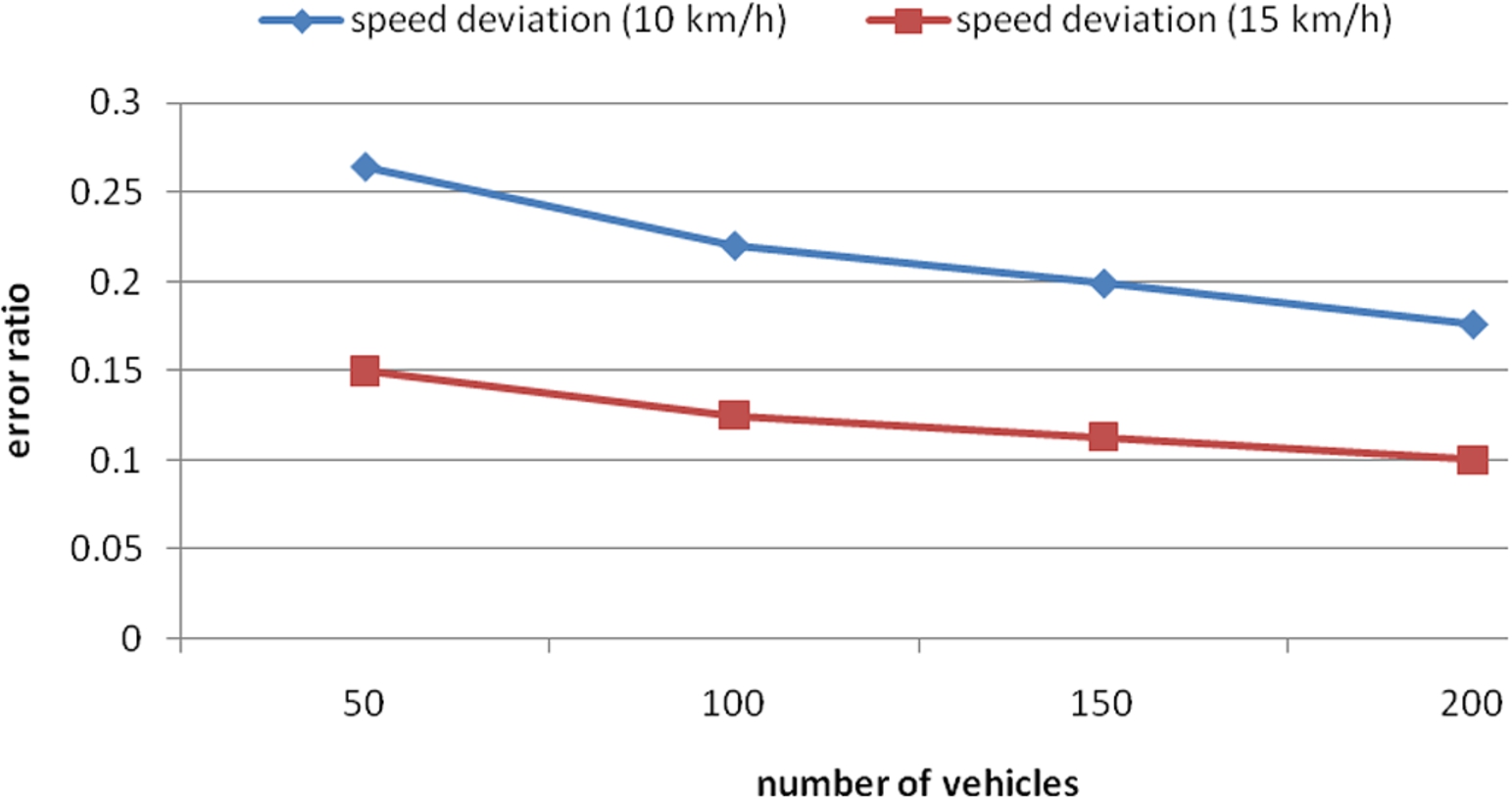
Error ratio with different vehicle density.
In APL [14], each sensor sends its vehicle-detection timestamps and ID to the server. In other words, the first step of APL is the same as that of the proposed approach. APL then performs a TDOD operation on all of the sensors and estimates the distances between each pair of arbitrary sensors. By contrast, the proposed algorithm finds the similar variance with statistical test through TDOD operation between each pair of arbitrary sensors. In the following step, APL estimates the length of each road segment by evaluating the movement time between the corresponding sensors. The movement time is evaluated by utilizing the correlation between the vehicle-detection timestamp sets of the two sensors subject to the assumption that the mean vehicle speed is approximately equal to the speed limit assigned to the corresponding segment of roadway. As a result, a larger vehicle speed deviation results in a poorer accuracy of the movement time (and hence a poorer precision of the estimated road segment length). On the other hand, in the proposed approach, a high speed deviation results in multiple detection patterns at the sensors located in different positions (see Section 3.2). Therefore, Fig. 12 shows that while APL ceases to function correctly when the speed deviation exceeds a certain value, the accuracy of the proposed algorithm actually improves as the speed deviation increases. There are 200 nodes in this simulation.
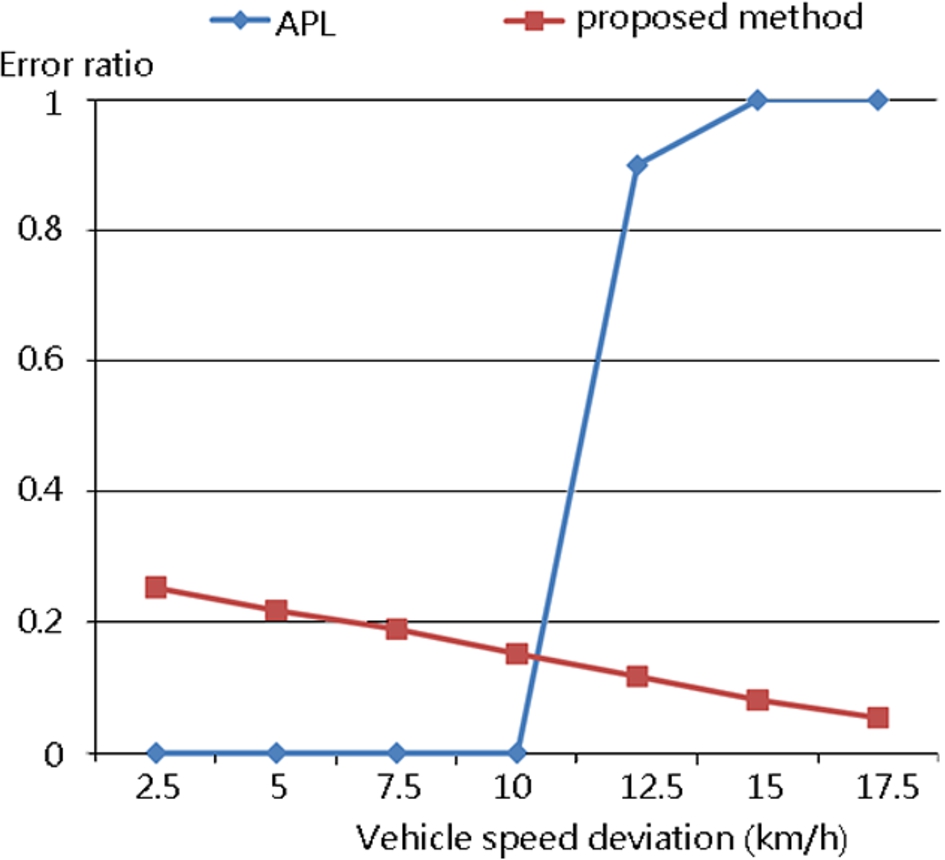
Error ratio of APL and proposed algorithm.
In the proposed algorithm, the variance of the TDOD process is used to classify the non-intersection node clusters and intersection nodes. The accuracy of the classification operation depends on the deviation of the vehicle speed over the road segment. This classification operation can be used to compare the vehicle speed distribution in one road segment with that in another. If the vehicle speed deviation is very small, the difference between the two distributions is not sufficiently distinct. Thus, the tendency of the error ratio for the algorithm proposed is this study is the reverse of that for APL.
In final scenario, it contains two 5-way intersections, eleven 4-way intersections, and seven 3-way intersection in selected area. Figure 13 shows that the proposed algorithm retains a localization ability in a network environment with heterogeneous intersection types. In addition, it exhibits a lower error ratio than that in a homogenous environment containing 4-way intersections only because the intersections in different types have distinct traffic properties. The lower error ratio arises as the result of a misclassification of some of the intersection types within the simulation environment.
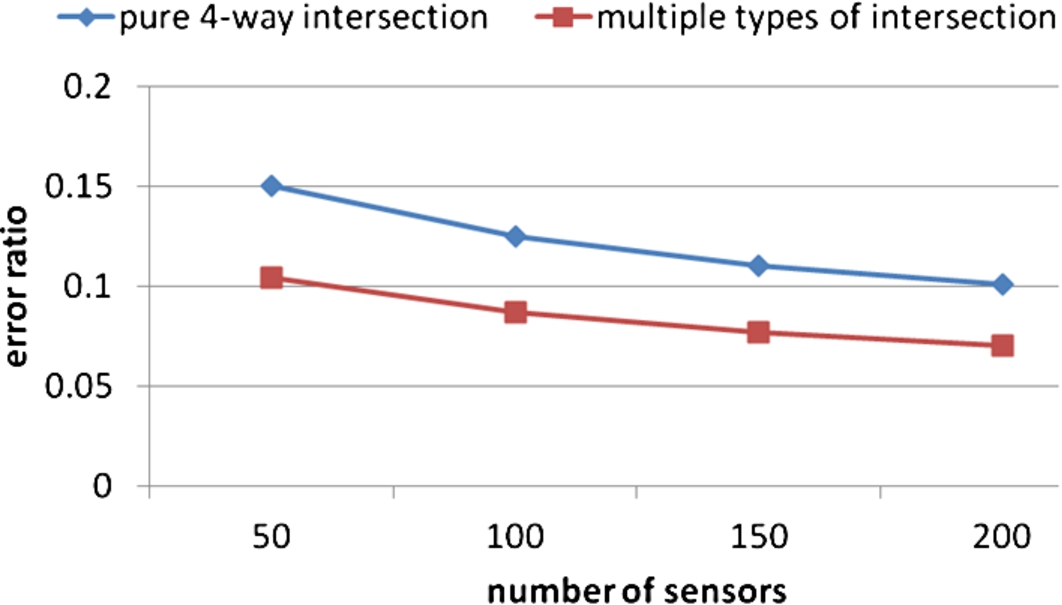
Error ratio in multiple types of intersection.
The following additional scenarios should also be mentioned:
(1) Large-scale networks: In large-scale networks (i.e., networks containing a very large number of intersection nodes), the performance of the proposed localization algorithm may be degraded. However, a large target area can be regarded as the combination of several smaller areas (i.e., fewer intersections). The localization accuracy would be improved by dividing the road network into several smaller areas with localization performed by a different server in each area.
(2) This section concludes with a comparison of the computational complexities of APL and the proposed algorithm, respectively. As discussed above, APL performs a TDOD operation in the first step. The TDOD operation is performed
Conclusion
This study has proposed an algorithm for localizing the roadside sensors in a traffic network using only binary detection information. The proposed localization approach is based on the covariance and means properties of the sampled binary detection random processes and is accomplished using simple, low-cost sensors. It has been shown that by classifying the sensors as intersection nodes or non-intersection nodes, a good localization performance is obtained under both high speed deviation conditions and noise conditions. Furthermore, it has been shown that for a similar level of computational complexity, the proposed algorithm provides a better localization performance than the APL scheme, even when the assumption of a uniform vehicle speed on each road segment is relaxed. In the future, this study will extend its related issues, e.g. issues in larger dense networks, and compare our extended study with more localization algorithms.
Footnotes
Acknowledgement
This work was supported in part by National Science Council under the Grant NSC 98-2219-E-006-010.