
Abstract
We study in this paper the problem of minimizing the number and the locations of deployed cameras in visual sensor networks where to objective is to monitor a set of targets with a predefined quality level. To this end, we first propose a mathematical programming formulation, based on mixed-integer linear programming (MILP), which is designed to provide optimal solutions in case where the deployment area is represented through a set of discrete potential locations of the cameras. Due to the combinatorial nature of such problems, finding exact solutions entails a tremendous computational cost. Consequently, we introduce various suboptimal solution approaches, based on a number of well-known metaheuristics, such as particle swarm optimization (PSO) and genetic algorithms. Numerical results show PSO succeeds to find the best solutions in the majority of considered scenarios. Furthermore, even for large instances, it provides better feasible solutions than those returned the MILPs after a significant amount of time.
Keywords
Introduction
Visual sensor networks (VSN) constitute a hot research topic [18], with numerous promising applications, including remote video surveillance, monitoring and assisting elderly and health patients, and habitat monitoring. VSN are generally deployed to autonomously and continuously monitor the totality of a geographic area of interest or a set of physical objects (targets) within that area [17]. Although, the price of cameras with networking capabilities drops significantly over the last years, minimizing the number of deployed cameras remains a first-class topic [11], because the overall system cost can increase significantly with the number of cameras, in particular where a wired network infrastructure is used to convey images towards a central processing node. On the other hand, depending on the application, the images of the observed targets must meet a number of quality criteria (e.g. number of pixels per inch) which either require using expensive cameras or reducing the distance between the cameras and targets which may decrease the number of targets that can be observed per camera. We study in this paper various techniques to solve the problem of tracking a set of targets with a required quality level objects on a two-dimensional place using a minimum of cameras. Our objective is to determine the cameras’ positions among a set of candidate locations along with their orientations. While small instances of this problem can be solved exactly using various mathematical formulations, as the problem size increases, solving such problem becomes computationally prohibitive. Indeed, Ai and Abouzeid [2] demonstrated that this problem is NP-hard in general. Consequently, besides the exact method formulated as a mixed-integer linear program, we introduce in this paper a number of suboptimal solution approaches, mainly based on meta-heuristic techniques. First, we adapt the generic framework of Particle Swarm Optimization (
Related works
The coverage in visual sensor networks was studied by many works in the literature [8]. In [2], an exact integer linear program (ILP) and a Centralized Greedy Algorithm (CGA) for the maximum coverage with minimum sensors (MCMS) problem is given. A Distributed Greedy Algorithm (DGA) is also proposed. They used last centralized methods as comparative baseline. By incorporating a measure of the sensors residual energy into DGA, they also develop a Sensing Neighbourhood Cooperative Sleeping (SNCS) protocol which performs adaptive scheduling on a larger time scale. With this protocol, authors guaranteed the maximum coverage/lifetime network over the best existent protocol. Aziz et. al. [3] employed particle swarm optimization to build an algorithm which finds the near optimal deployment of sensors providing the best coverage. Then, they evaluated the fitness of the solution using Voronoi diagram. Their results showed that a good coverage is achieved in less time than existing approaches. The area coverage problem in a 2D/3D-grid space has been investigated in [9]. The solution process was based on binary particle swarm optimization inspired probability (BPSO-IP). This method is based on the PSO sharing mechanism information with a new probability based parameter. In addition, they proposed three other metaheuristics. They proved that PSO-IP overcomes the three other methods (on number of cameras deployed to ensure a total coverage), especially with large instances. Authors in [19] handled deployment in video sensor networks. They try to find optimal continuous deployment for angular coverage (cameras with 360° span) in tow stages, first a master problem try to find discrete positions from region of interest, next a sub-problem to determine which continuous points are not covered. They repeat this process iteratively until the sub-problem is infeasible. Authors in [6] studied a particular form of target coverage problem where the aim was to cover targets by at least k sensors that m-connected. They proposed a genetic approach to deal with this problem. The results were promising (better time complexity over other GA based methods). Author’s method, outperforms (selected potential positions) existing algorithms and greedy approach, in various scenarios of WSN. The authors in [4] proposed an algorithm to find the minimum number of visual activated sensors to cover all the targets. They took into account the multiple targets view from single node and explore the redundancy of nodes as energy savings (they considered active and sleep mode for redundant sensors). Finally, a two-phase algorithm, based on hybrid method (heuristic and exact solution), was designed in [1] to provide an approximate solution to the target coverage in a three-dimensional space. Note that our solution approach is partly inspired by the work in [9]. But as far as we know, no paper in the literature has formulated coverage problem in visual sensor networks that considers a continuous measure of image quality. Also, we designed an exact model as a means to evaluate the performance of various metaheuristic-based techniques.
Coverage model
Problems related to deployment of camera-based sensor networks can be generally classified according to the coverage type: (i) target coverage; (ii) area coverage. While in the second type, the objective is to cover a total geometric area with minimal camera sensors, our work is more related in the first type as we aim to cover a total number of given targets spread over some area.
To this end, we use the directional model [16] of camera coverage represented in Fig. 1.
Let assume that a camera is deployed over an Euclidean space A. We denote by
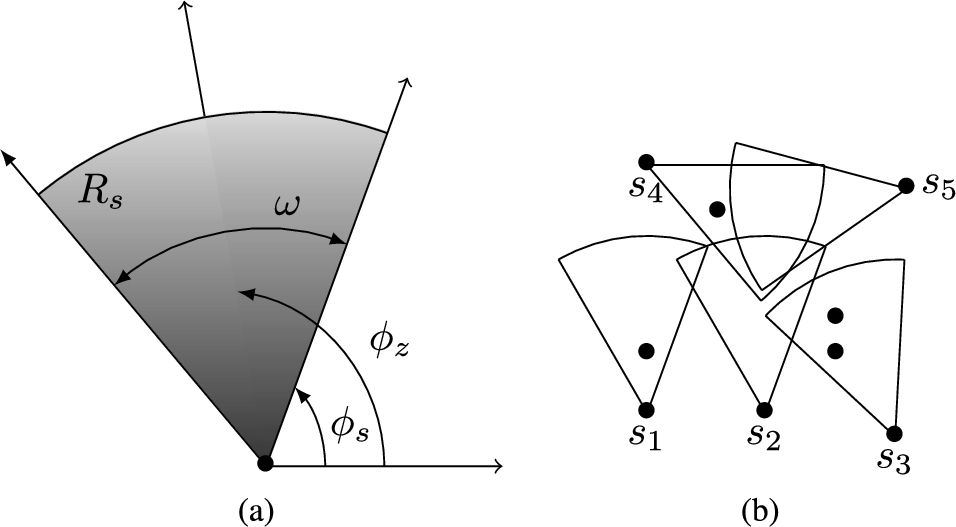
Illustrations of: (a) Directional Model; (b) Three active cameras covering 4 targets.
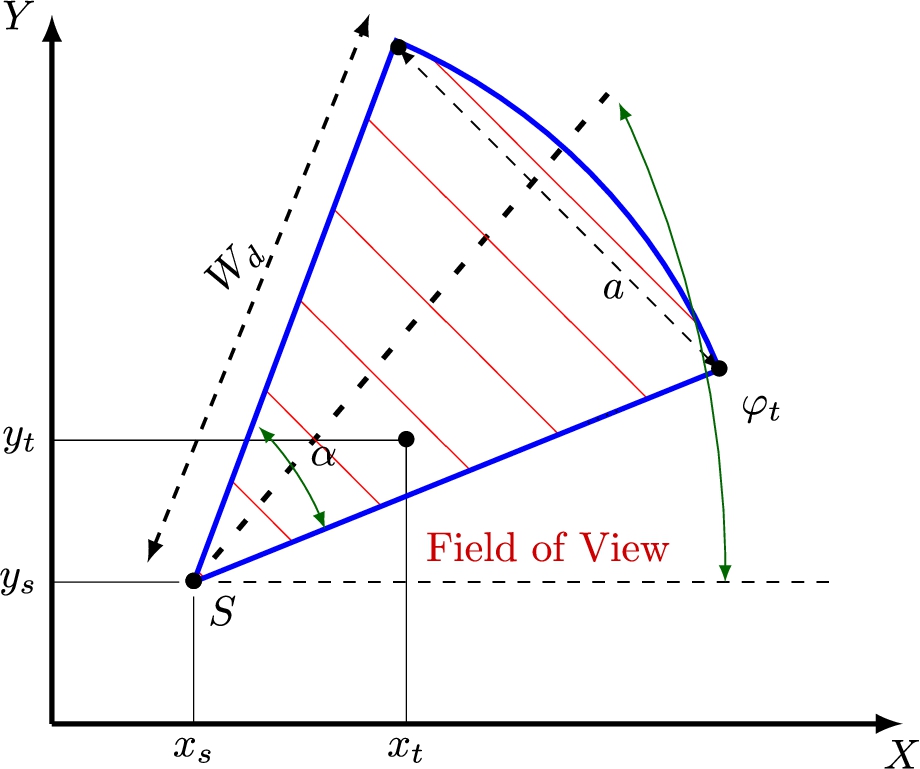
Camera’s field of view.
We introduce in the following our optimization model whose objective is to deploy a minimum number of cameras to cover a set of known targets in a two-dimensional space. Table 1 defines the main used notations.
Problem’s formal notations
Problem’s formal notations
First, we introduce the binary variables
The minimization of the number of deployed cameras can be expressed using variables
Meanwhile, the following set of constraints must be satisfied.
Also, each target must be associated to at least one camera, which is guaranteed through the following set of constraints:
Now, if
Finally, we enforce a minimum coverage quality for each target through the following constraint:
Due to the potential number of binary variables for real-world instance, this problem is computationally-hard to solve in general. We introduce in the following section a set suboptimal solution methods with the aim to obtain high-quality solutions in a reasonable amount of time.
We present in this section various solutions methods to solve our problem, first by defining a greedy algorithm and then by proposing a set of algorithms based on metaheuristic techniques.
Greedy algorithm
The idea of the greedy Algorithm 1 is to find at each iteration the pairs
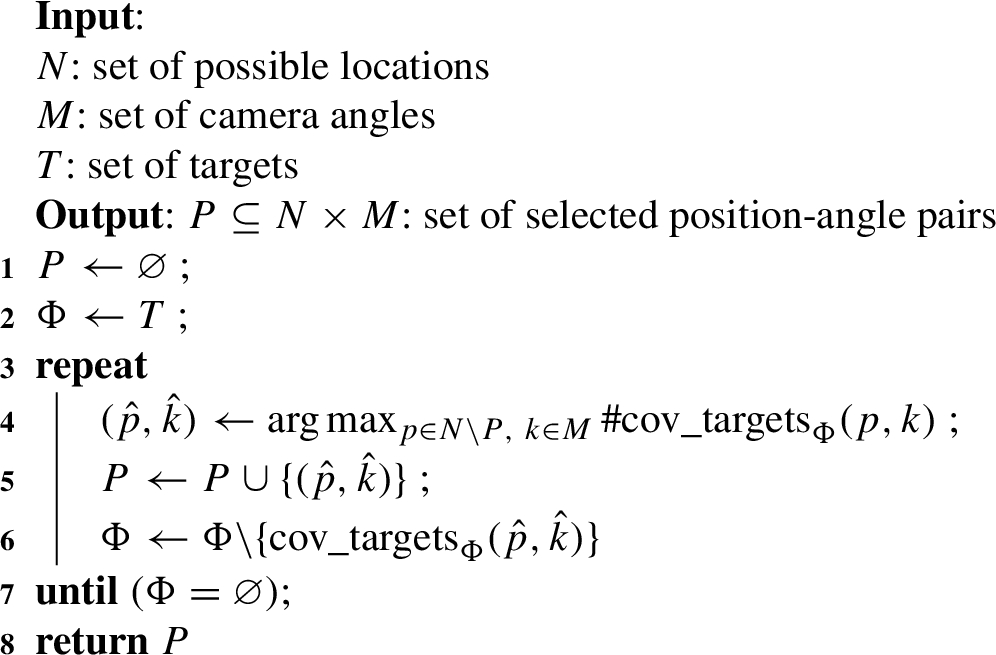
Greedy Algorithm
Particle swarm optimization (PSO) is a meta-heuristic method invented by Russel Eberhart (Electrical Engineer) and James Kennedy (socio-psychologist) in 1995 [7]. This method, inspired by social behaviour, has been thought as an optimization tool dealing with continuous functions initially then discontinuous ones lately [12]. The original algorithm considers a population of individuals (fish schools), looking for some optimal region (amount of food). However, in contrast to evolutionary algorithms, particles of PSO cooperate together to find the optimal rather than competing against each other. Note that many research works showed the capability of PSO to tackle large instances problems [5].
In general, a PSO algorithm consists in a group of individuals named particles, where each has its own position in the search space and represents a potential solution to the optimization problem. After each iteration, these particle move according to their components [13]. Specifically, at some iteration t, a particle p is characterized by the following:
Actual velocity
Actual position
Best neighbourhood solution
The best solution found so far is denoted
A given solution for our deployment problem is a position
To enable “particle travel”, we allow two types of movement at each iteration:
Rotation: changing the orientation of one deployed camera.
Displacement: moving some camera to another position.

PSO solution.
Note that these movements are guided by the velocity parameter, which takes in our case a discrete value. Thus, we redefine (9) as follows:
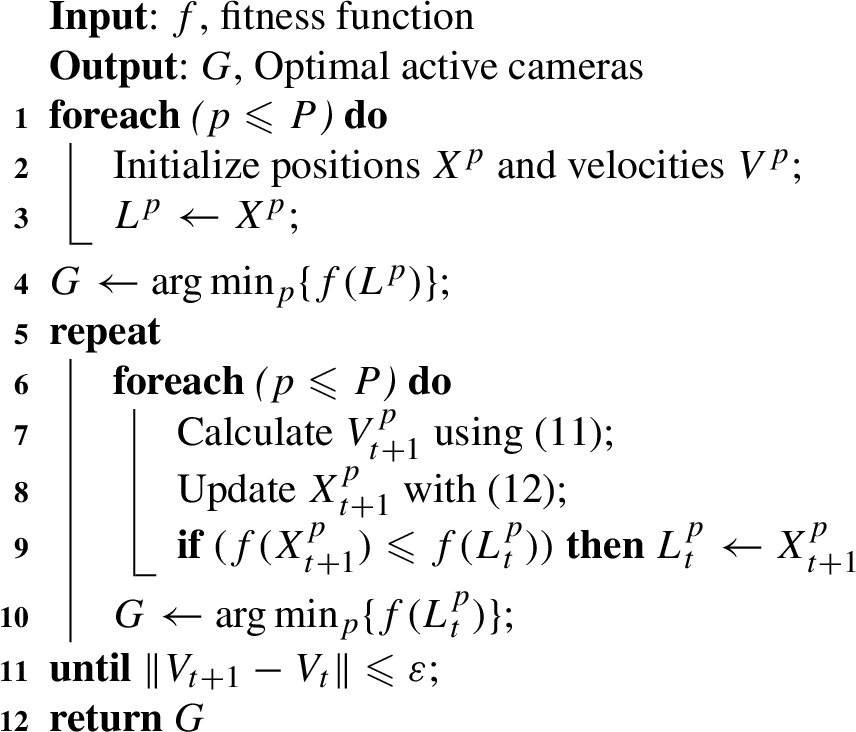
Proposed PSO algorithm
The stopping criteria corresponds to the situation where the velocity became near zero value (
Note that our fitness function f will be reused to evaluate solutions in the other metaheuristic methods (GA and SA), such we can compare these methods.
This method was developed in the mid 1980’s by various researchers [15]. It consists on generating initially a random solution, then to switch from one to another. A new solution is selected if it improves the objective function. Otherwise, this solution may be selected with a probability calculated as follows:
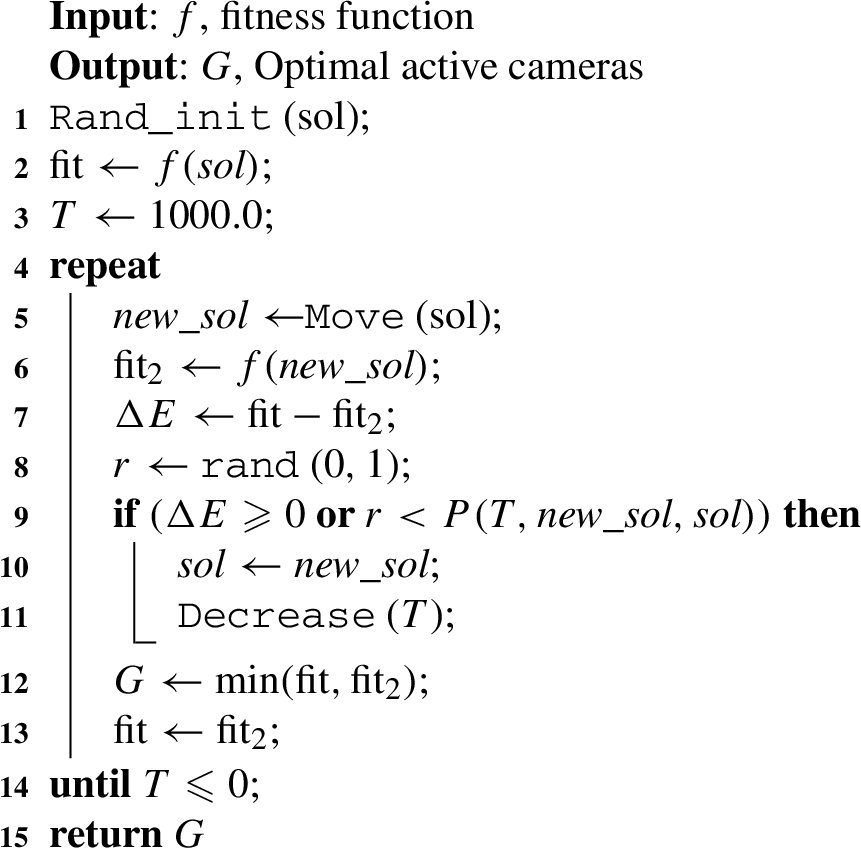
Proposed SA algorithm
The
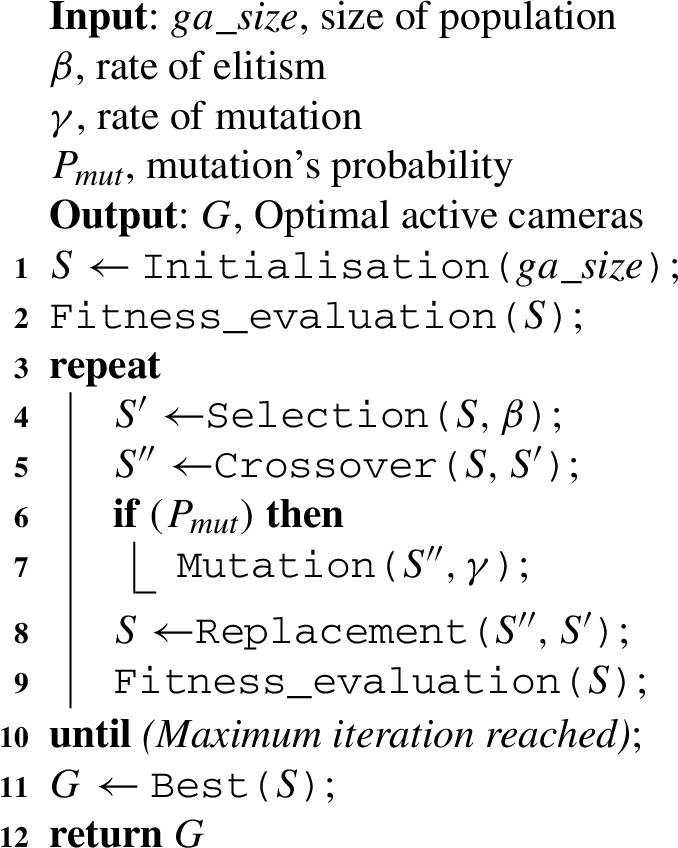
Proposed GA algorithm
A genetic algorithm (GA) is a metaheuristic population-based optimization method [20]. GA starts with a random population of Roulette-wheel method, i.e. β fittest solution (most probably chosen) from the initial The single crossover point was adapted i.e tow parents are selected, from which we define a crossover point, and swap genotypes of both parents to generate tow new child. Perturb a solution (displace or rotate a camera) within γ rate of mutation and replace old members by new fittest one.
Experiments and results
We discuss in this section a number of numerical experiments related to our different approaches. First, the most important parameter to define in order to implement our metaheuristics, is the solution coding or representation.
Each solution is encoded directly where the vector X represents camera positions and angles (Fig. 3). This coding solution was adopted for the three methods (PSO, GeA, SiA). Given
The experiments were executed on a computer with Intel® Core™ i5-2400 CPU @ 3.10 GHz × 4 and 8.0 GB of RAM. We summarizes in Table 2 the main parameters used to implement different methods.
Approaches parameters
Approaches parameters
Figures 4(a)–4(e) depict examples of the solutions determined by our five approaches on a problem instance of 20 targets spread over area of 100 × 100 possible locations.
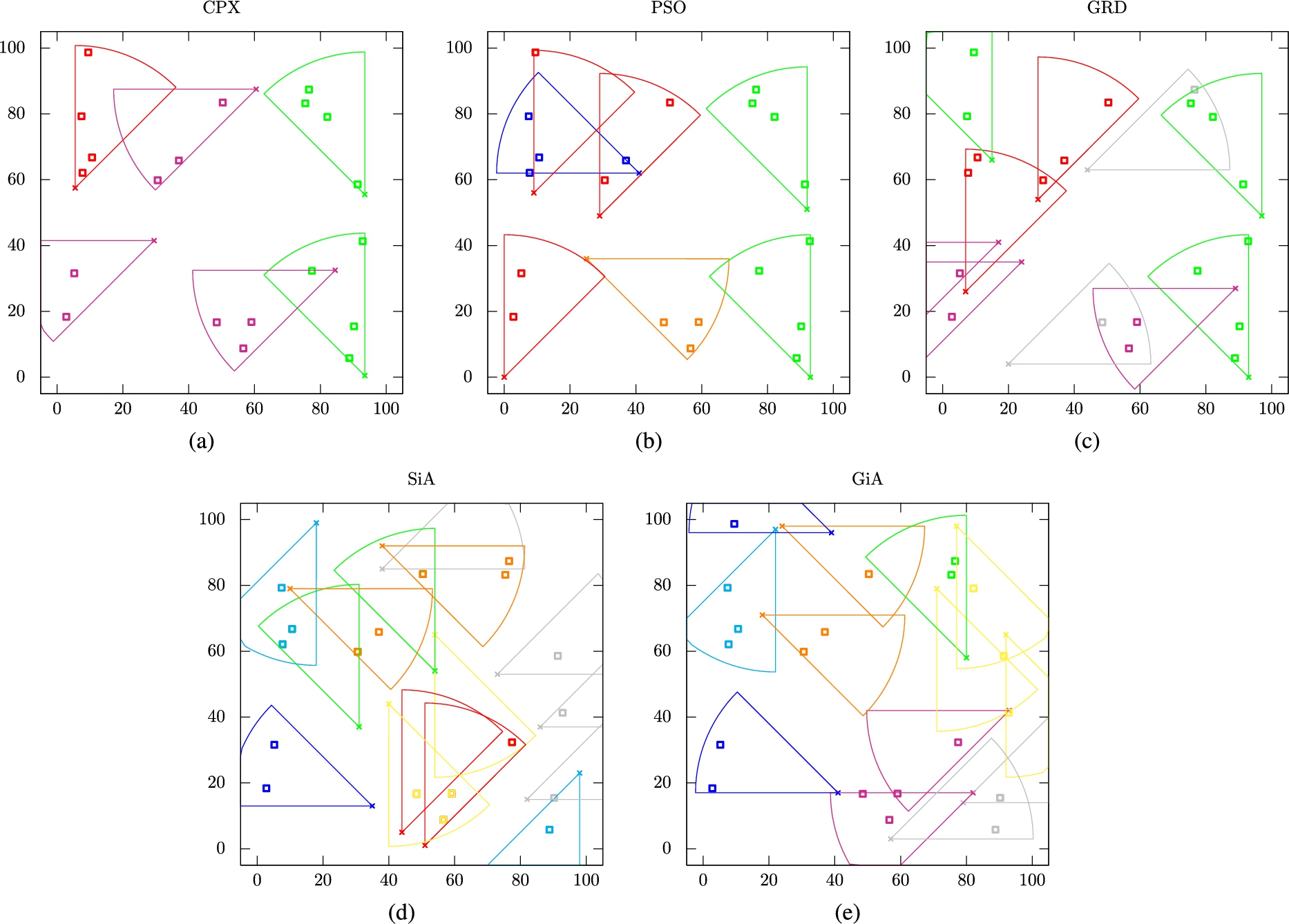
Illustrations of: (a) Cplex solution; (b) PSO solution; (c) Greedy solution; (d) SA solution; (e) GA solution.
To experiment the impact of δ on found solutions, we solve by our exact approach ten (10) instances of a 50 targets spread over 100 × 100 area with
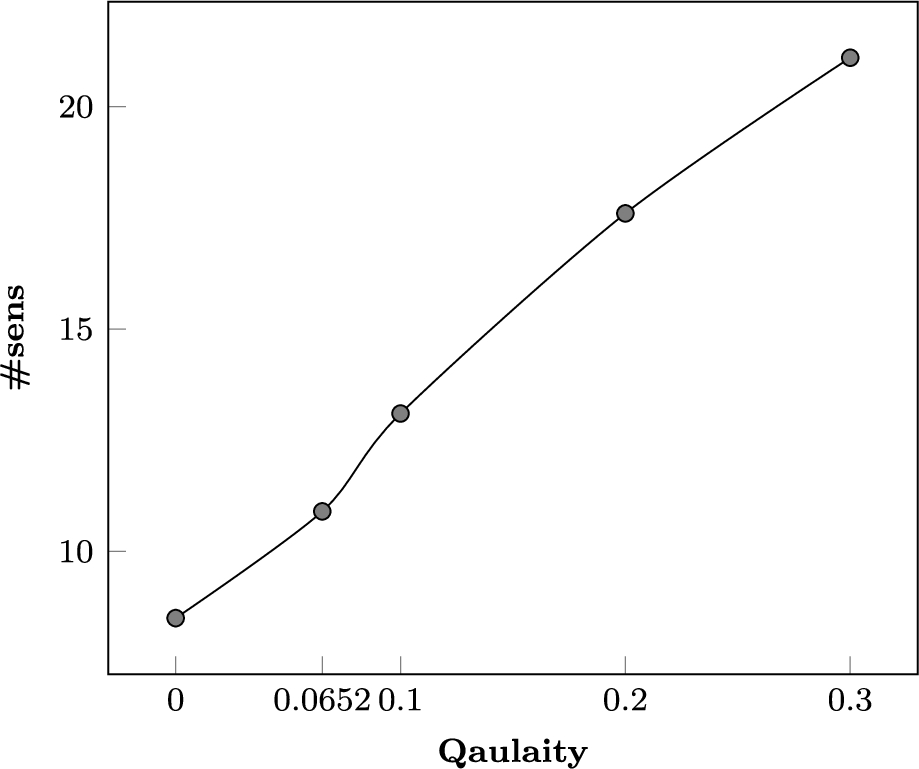
Sensors found by
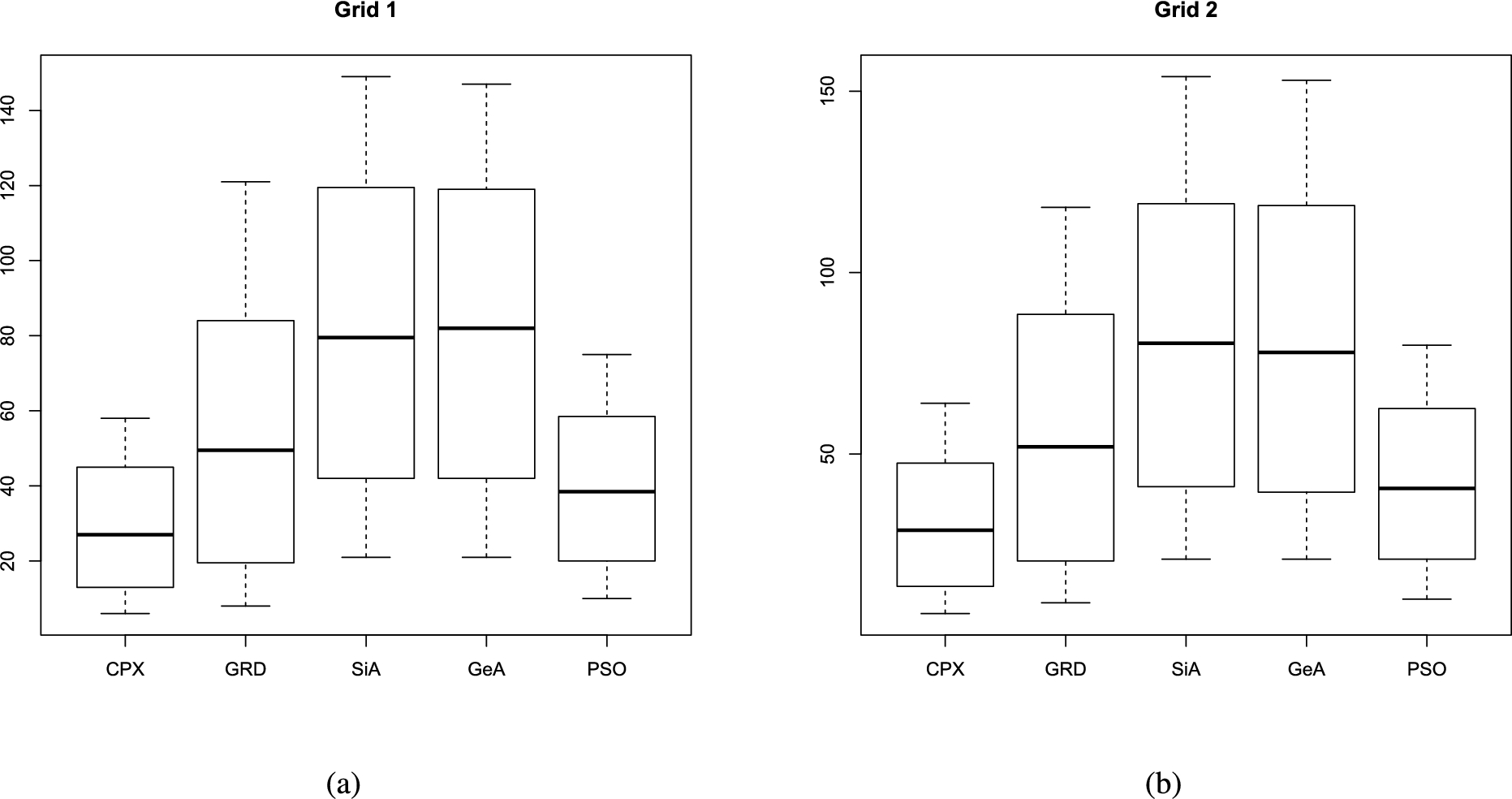
Next, we solve 4 sets of problem instances with 50, 100, 150 and 200 targets, respectively, using also the five methods. For each instances, we experimented two grid scenarios: Grid1 (50 × 50) and Grid2 (100 × 100). For each scenario, we solve by the five approaches ten (10) instances of the problem.
All over these experiments we refer to the exact method by
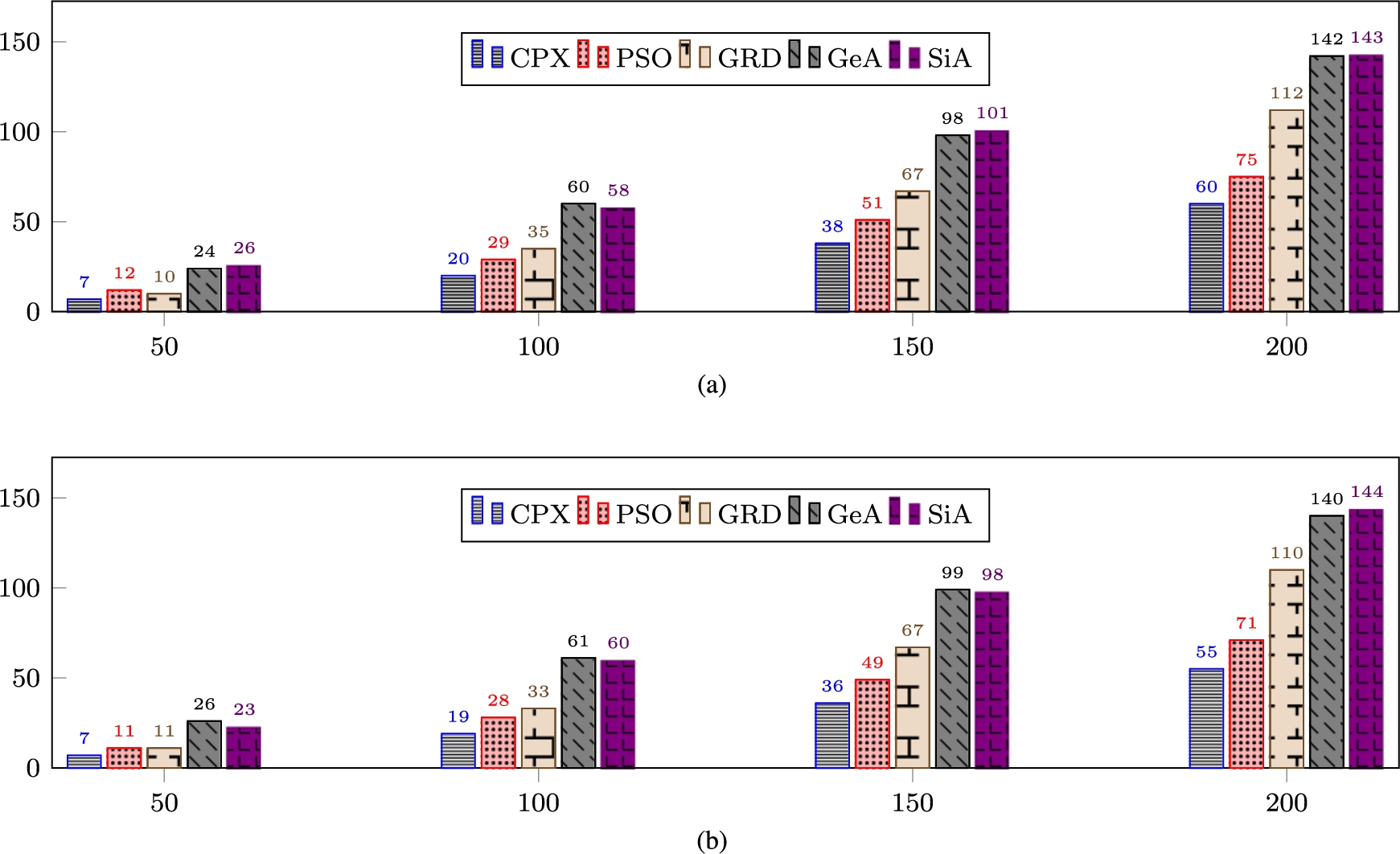
Sensors found by different approaches on: (a) Grid 1 (50 × 50) (b) Grid 2 (100 × 100).
Sensors found by different approaches on: (a) Grid 1 (50 × 50) (b) Grid 2 (100 × 100).
Times
Times
In another set of experimentations, we seek to determine the impact of the grid size, which corresponds to the number of possible camera location per area unit; on the solution quality. To do so, we consider two scenarios with 50 and 200 targets, respectively, uniformly spread over an area of 400 × 400 m2 (named IG50 and IG200, respectively). We evaluate both the mean number of cameras and computation time over 10 instances for each scenario. The results, depicted in Fig. 8(b)), show that
We can conclude that even if
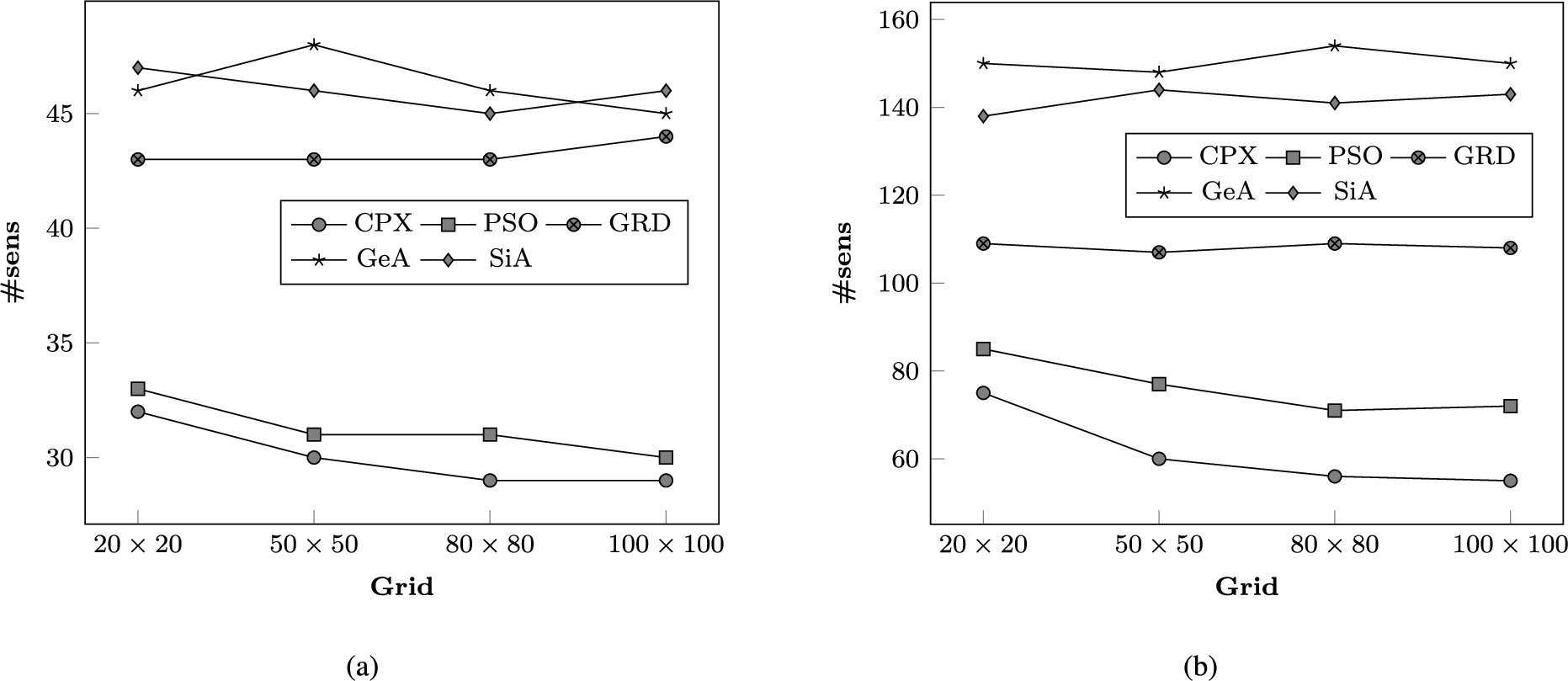
Impact of grid refinement: (a) 50 targets, (b) 200 targets.
We studied in this paper the problem of cost-effective deployment of visual sensor networks. To this end, we first formulated the problem as a mixed-integer linear program where the objective is to minimize the number of deployed cameras subject to coverage and quality constraints. As the problem is NP-hard in general, we further designed a number of metaheuristic-based algorithm methods with the aim to obtain high quality solutions in a reasonable amount of time. Experimental results exhibited that the PSO-based algorithm achieved the best compromise between CPU time and objective quality. The results illustrated also the impact of grid density, to some extent the targets can be covered by less cameras at the price of higher computational cost. As future work, we plan to extend our model to consider connectivity and energy-efficiency constraints.