
Abstract
Wireless sensor network (WSN) is a group of spatially dispersed sensors for monitoring the physical conditions of the environment and organizing the collected data at a central location. Since WSNs typically have no infrastructure, one of the challenges in WSNs is the lack of appropriate method for an operator to interact with the WSN. Practical tasks for WSNs require sensor node adaptive to changes in WSN configuration, user input, and commands hence, monitoring and interaction with the WSN is needed. In this paper, a new scheme for configuration dissemination with monitoring of sensor state is proposed to control dynamically sensor node operation in real time. Moreover, a method is provided for the operator to observe the state of the sensor node, which helps the operator provide an appropriate control input to the WSN. We prove the stability properties of the proposed algorithm and show the simulation results.
Introduction
Wireless sensor networks (WSNs) consist of sink nodes and a large number of sensor nodes that coordinate autonomously. These networks are used to monitor physical or environmental conditions like sound, pressure, temperature, and propagate data through the network to a main location. However, sensor nodes are not yet capable of autonomously performing various tasks, and many tasks require coordination between an operator and the WSN. Therefore, the operator needs to recognize the state of WSN and convey parameter adjustments or configuration to the WSN.
One of the prominent works of configuration propagation modeled is SPIN [1]. These researchers focused on the efficient propagation of individual sensor observations to all the sensors and proposed data descriptors to eliminate the chance of redundant transmission in WSNs. Other authors proposed a TDMA-based data dissemination protocol for WSN to offer a degree of reliability [2]. The Firecracker protocol [3] used a combination of routing and broadcast principles to rapidly propagate data throughout WSNs. Trickle [4] was proposed for propagating and maintaining code updates as fast as possible from the operator to all nodes in the network. This protocol used suppression and dynamic adjustment of the broadcast rate to limit transmissions among neighboring nodes. It only provided a mechanism by which a node might decide when to propagate the code. Deluge [5] added a feature that supports transfer of large data objects based on Trickle principles. Still other authors proposed a gossip-based approach where each node decides to forward a message to another node based on some probability [6]. The problem with gossip is that, if a source has very few neighbors, then the nodes will not gossip and the information dies out. Middle-ware has been proposed [7] to provide controlled propagation to tune the process according to the desired reliability. In another case [8], a multi-rumor overwriting (MRO) model was proposed. The model described propagation and interaction of periodically sensed data, which were distributed by gossiping, without increasing the traffic on the network. Walker et al. [9,10] focused on two methods of data propagation (flooding and consensus methods) and compared the ability of operators to manage the system to the desired goals. In the flooding method, each node explicitly matches the value of operator command, and in the consensus method, each node matches the average value of operator command of all the neighbors it senses. In [11], a simple data propagation method with operator intent delivery was proposed, which allows users to interact with the WSNs to convey desired parameter values for the operations.
However, existing works have focused on the conveying the data between each node, but WSN requires an operator to be able to observe the WSN states in response to user input and the effects of control input. This paper proposes an autonomous real-time algorithm for data dissemination. In Sect. 2, we propose a method to properly propagate WSN configuration or user input by indirectly setting parameter within the framework of local rules in a decentralized manner. Based on stability analysis, we show that the proposed algorithm allows the user to observe effectively the state of the sensor node by understanding WSN dynamics. In Sect. 3, we show the superior performance of the proposed method to the consensus approach. Conclusions and future works are discussed in Sect. 4.
Proposed algorithm
Model
We consider a WSN system consisting of
To this end, we define the state of the WSN system as
Stability analysis
In this section, we will analyze the feasibility of the proposed algorithm for an operator to achieve desired WSN configurations. We denote a steady state
From (2),
According to (5),
Next, we need to prove that the proposed system ensures the stability. If the system is asymptotically stable, then the trajectory will converge to the steady state, described in (10) and (12), as time goes to infinity. In order to derive the system stability, we define the following change of coordinates
We assume that there exist positive definite matrices P and Q,
For the state monitoring, the sink node determines the difference between the states of its neighbors and control input as
Simulation results
Configurations
To evaluate the performance of our proposed system, we develop a simulation environment using MATLAB. The simulation area is 100 m × 100 m, where the entire network is divided into equally shaped grids, and the sensor nodes are uniformly deployed. We set
Results
Time trajectories of state of 10 nodes with
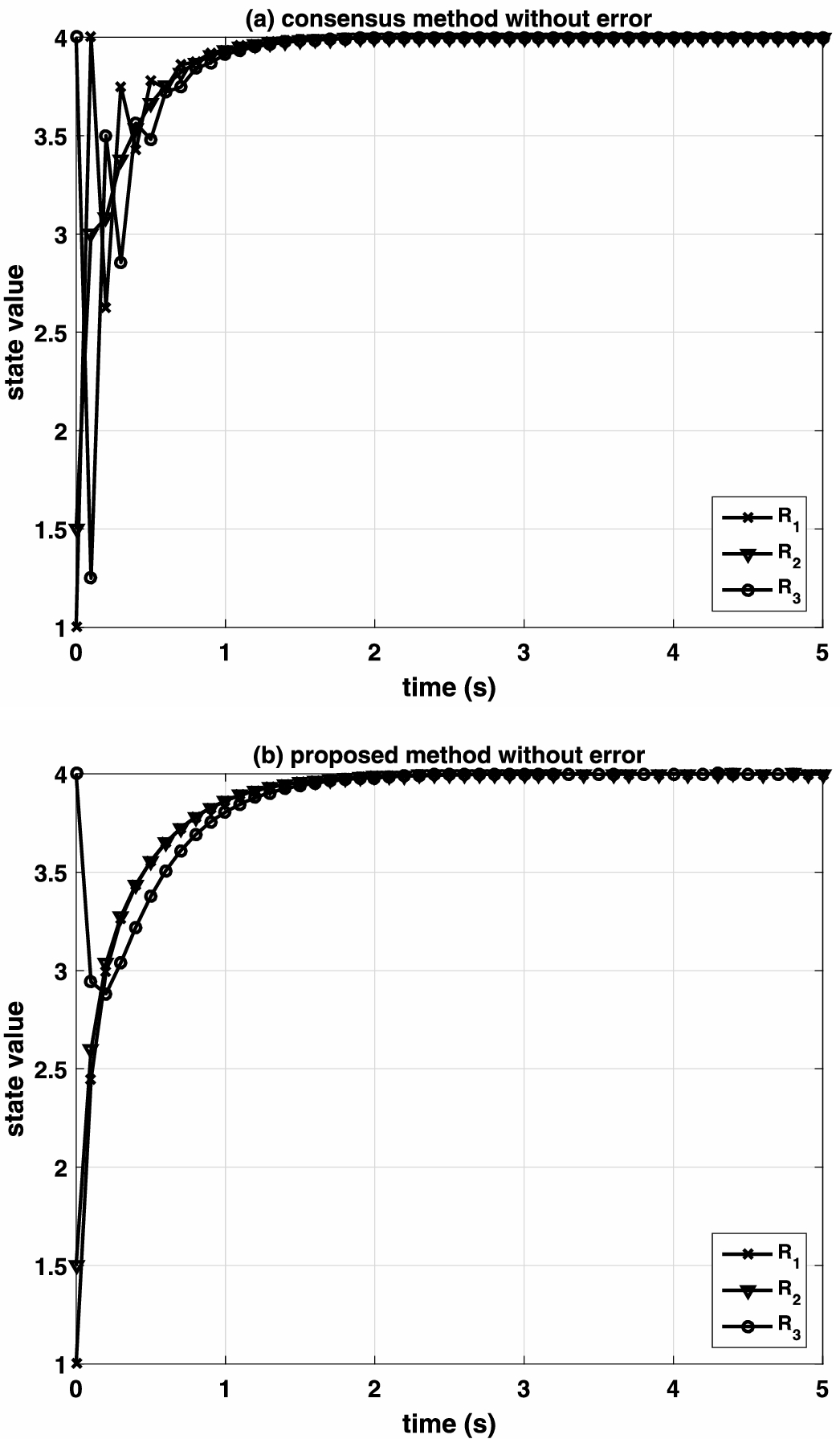
We compared the performance of the proposed method with the consensus method [9]. The consensus algorithm is an asynchronous distributed protocol for distributed averaging, which aims to compute the average
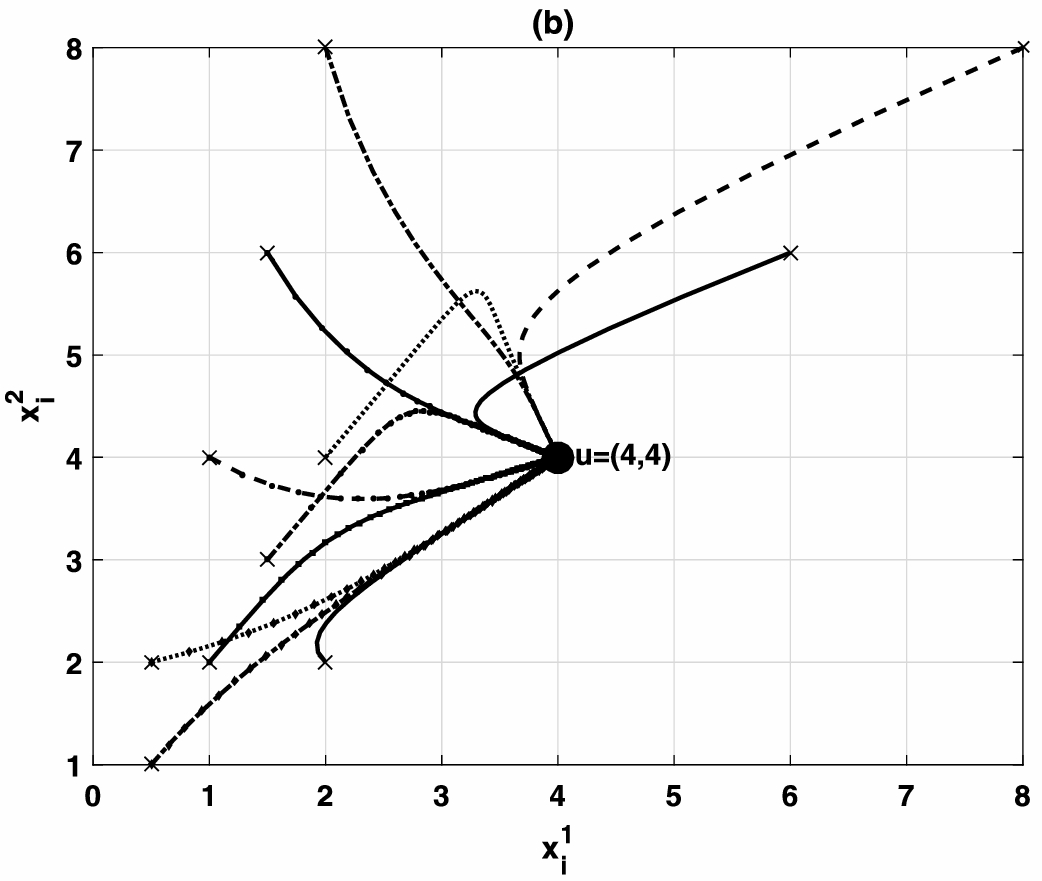
Figure 1 shows the trajectories of states of 10 among 50 nodes (
Time trajectories of state of
Time trajectories of state of
Figures 2–3 illustrate time trajectories of node states when the command input remains constant during runtime. The input is given by the operator, such as
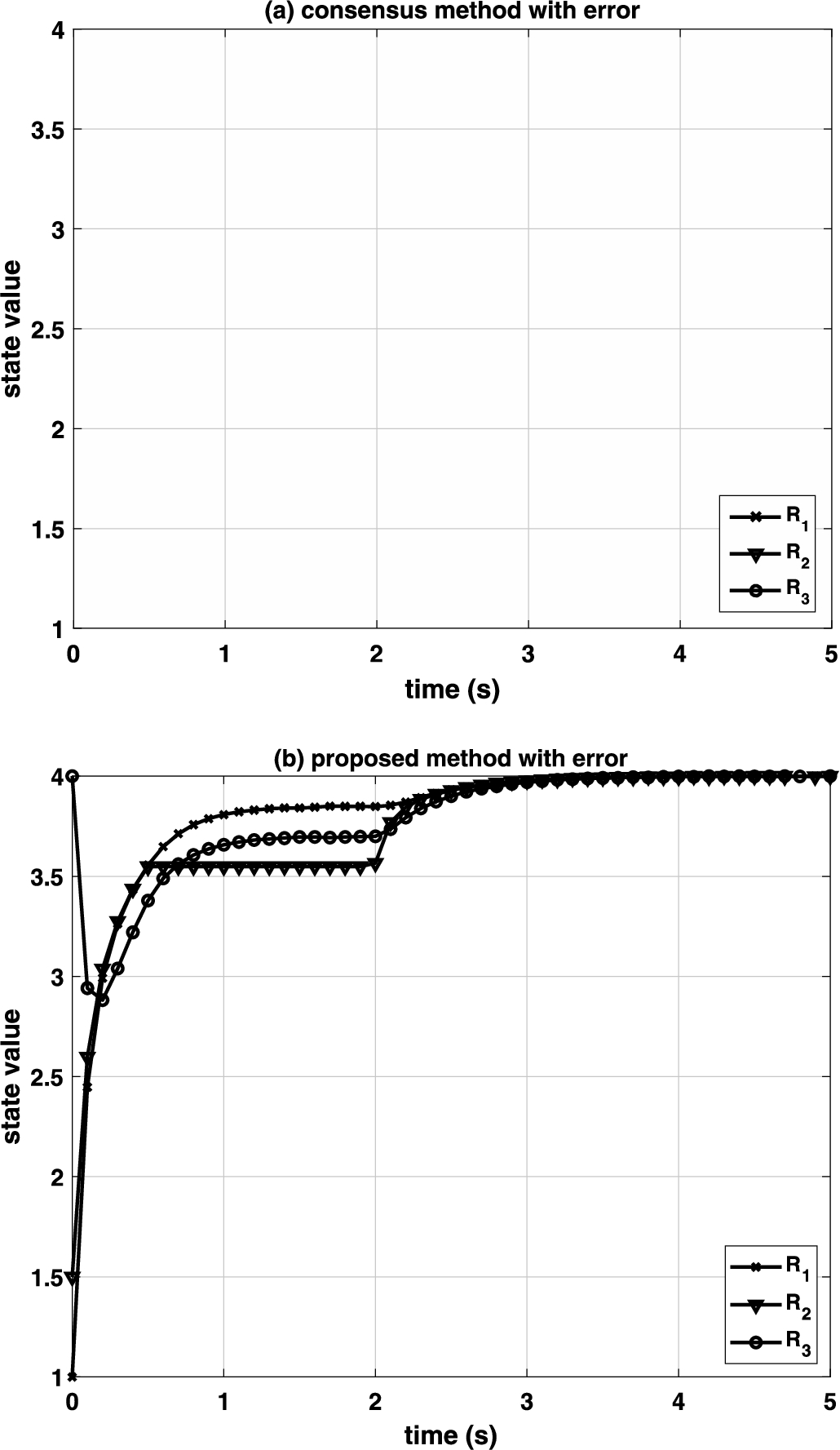
Figure 3(a), (b) illustrates the state change of nodes in an error condition. The error condition is implemented so that the state value of
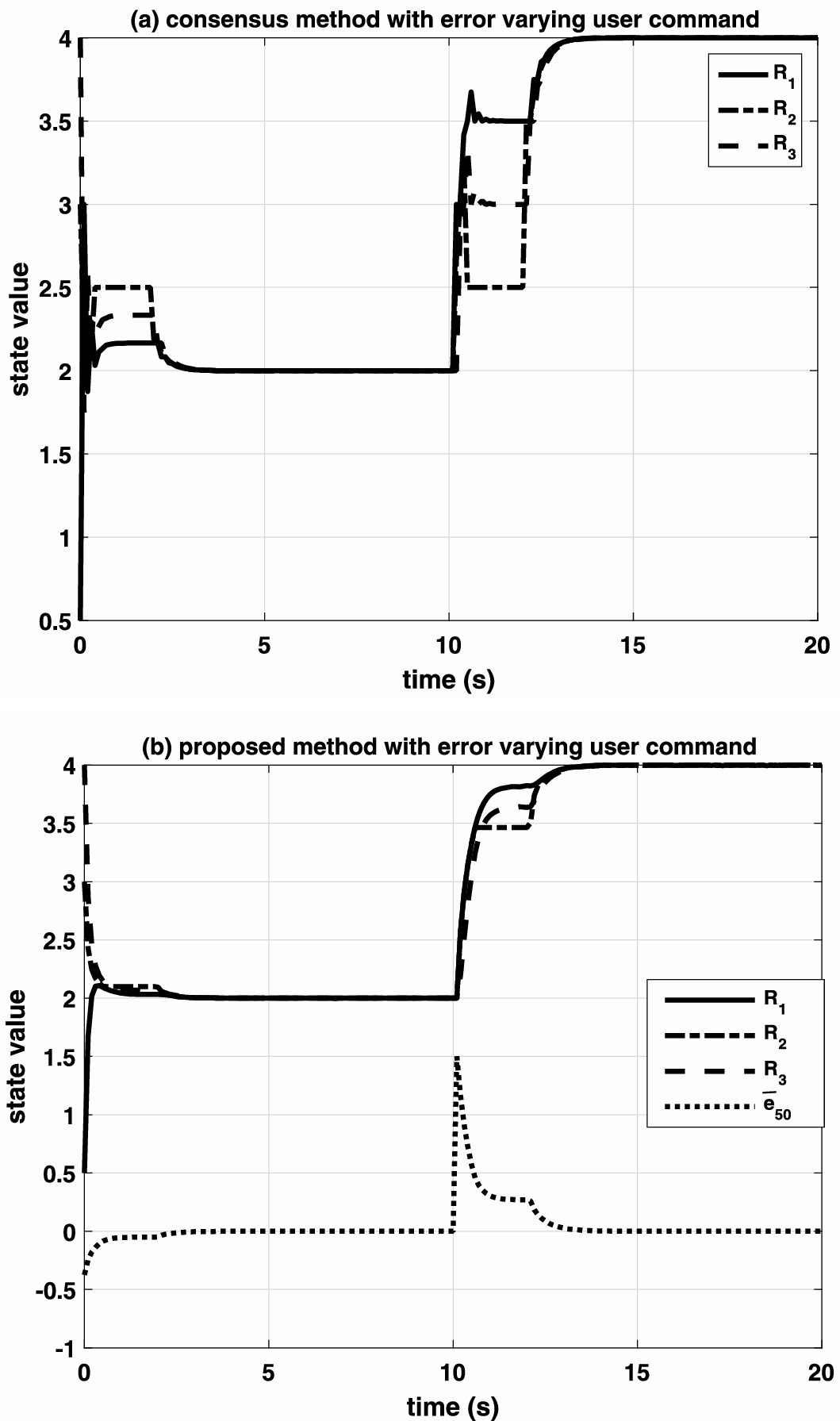
State adaptation according to user input change during runtime: (a) consensus method and (b) proposed method.
Next, we examine the trajectories of states corresponding to control input changes during the runtime. Simulations are conducted over the interval from 0 to 20 s in 100 ms increments. The configuration input is initially set to
This paper presents a scheme of configuration dissemination for WSN systems. The operator interacts with the sensor nodes by applying user input to a single sink node while the other nodes interact with each other according to the proposed dynamics. The proposed scheme properly influences the WSN operation by propagating the operator input to the rest of the sensor nodes based on the control laws of each node. The operator can effectively observe the state of the WSN by understanding dynamics and estimate the timing for the next control inputs, such is based on the feedback of the sink node only. An important area for further study includes selection of a sink node which influences dissemination to the rest of the sensor nodes, and system modeling with moving nodes in the WSN. In this study, the sink node provides feedback to the operator for the state estimation in the network. Then, the operator can be able to learn to understand node states and estimate the timing to give the next configuration inputs. However, this study assumed that the state values at a particular node represent the state of the entire system, so it might be different from the actual situation. In the next study, it needs to be extended in such a way that the state of the entire system can be predicted.
Footnotes
Acknowledgements
This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science, ICT & Future Planning (2017R1A2B1007779).