
Abstract
The robust control network for nonlinear large-scale systems with parametric uncertainties also considers the uncertain robust stabilization problem for controlled networks. In heterogeneous populations, hybrid regression models are the most important statistical analysis tools. To aim of the study is to conduct a more in-depth analysis of the existing completive robust control networks relying on biased temporal logic. Compared with the symmetric distribution, the skewed distribution can obtain accurate and effective information. Therefore, a time-series logic model under skewed distribution is proposed. The temporal logic under skew state is applied to describe the normative language of fuzzy systems. Firstly, the mixed nonlinear regression model under skewed distribution data is introduced to test whether the temporal logic formula can be realized under the skew state. Secondly, through the method of reduction, the control flow interval logic CFITL is studied, and the time series logic sequence is used to describe the measurement output loss. The sufficient conditions for the control network system to satisfy the exponential stability and
Introduction
To better analyze the nature of the data, we often cluster the data, classify the overall data according to different indicators or characteristics, and then analyze the data with similar index in detail [1,18]. In the heterogeneous population, the normal distribution model is one of the most important data analysis tools. It mainly studies mixed data with two or more sub-clusters. Since Goldfeld and Quandt introduced the hybrid regression model for the first time, the mixed F-regression model has attracted the interest of many statisticians [2,5]. Recently, the data often does not strictly follow the normal state [14]. The distribution, most of which has a certain skew, is not strictly symmetrical. Currently, it is somewhat out of date to use the symmetric distribution such as normal distribution and t distribution to study the nature of the data [8,12]. Therefore, the partial distribution and the partial deviation the skew distribution of state distribution have attracted the attention of many scholars. For the first time, Azzalini studied the partial normal distribution and its properties [16]. Discussed a series of skewed distributions and their respective properties, and obtained the super-order moments of these distributions.
In the network environment, considering the characteristics of the NCSs themselves, the nonlinearity of the research objects is a problem that researchers cannot avoid [19]. Since the current control theory is mature in linear systems, scholars consider the control theory of linear systems to solve the control problems of nonlinear systems. There are two more common classical methods: one is to use global linearization of the research object by feedback linearization, but the application is relatively low, the research object can only be a finite nonlinear system; the second is to select a certain work [3,15]. The small-time range of the point, then analyze the obtained linear system and design the control method, but when the system is far away from this working point, it is difficult to meet the control requirements of the system [10]. According to the second method, the method of describing a nonlinear system based on the T-S fuzzy model is widely used. The core idea of this method is to transform the nonlinear system into linear subsystems under multiple fuzzy rules, design corresponding controllers or filters for each fuzzy rule, and then fit them using the distributed compensation principle (PDC) [17]. For the strong fitting ability of the nonlinear system and the simplicity of the method, the T-S fuzzy dynamic model is applied to solve the nonlinear control. T-S fuzzy control technology has been applied in some industrial processes.
In this paper, a design method for skewed-distributed sequential logic robust control networks is proposed. The uncertainty caused by the delay and modeling existing in the network control system is transformed into a matrix satisfying the given constraint condition, and the uncertainty caused by the unknown disturbance existing in the external environment is equivalent to the bounded energy. To meet the boundary value of the uncertain matrix under such constraints and the limit value of the energy function matrix satisfying the given
Methodology
Hybrid nonlinear regression model with skewed distribution data
In the test model of normal distribution, the test statistic
The simple algorithm of the skewed distribution optimization problem is applied to regression. The algorithm is suitable for variables with small sample size and few samples. When there are many outliers in the data, the parameters estimated by the simple algorithm are compared. it is good. It is suitable for sample data with large sample size and few independent variables. For the data characteristics of GIC and
In this paper, we choose the skewed distribution method to estimate the parameters, and the coefficients of the model under different tau are shown in Table 1.
Parameter estimation of the model
Parameter estimation of the model
***, **, * Represented separately 0.001, 0.01, 0.05 significant.
The curves obtained by the skewed distribution method obtained in Table 2 above are substantially coincident, and the obtained skewed distribution function is obtained. The distribution of the network can be determined, thus bringing a lot of convenience to practical use [4]. In the measurement world, skew processing can be classified into a stochastic model or a function model. For skewed distributions, most of the coordinate observations can be considered as equal precision or approximate precision observations. Therefore, the gross deviation observations are considered to be the normal distribution subsamples with the same variance as the normal observations, and thus the skewed distribution is returned. The function model is easier to understand and more realistic. On this basis, the residual structure statistic can be utilized, and the hypothesis test method can be used for gross error detection and localization [6]. Therefore, the variance of the sample is often used to replace the variance of the parent, and the common point without the gross difference is used to calculate the transformation parameters. The transformation coordinates and transformation residuals of all observation points are calculated by this parameter to obtain the result.
The gross error detection of the
Temporal Logic CFITL Temporal Logic CFITL is an extension of the computational tree logic CTL, introducing the concept of intervals to describe the target structural factors. The system-based functionality is associated with system design factors based on attributes described by the temporal logic. Given a strict set of partial orders D, let
The CFG only focuses on the timing logic of the program, ignoring the data flow characteristics of the program. The in-process sequential logic analysis methods mainly have the following three types: use the dominator graph to find the loop, and mark the loop for later optimization. Because loops are the most worthwhile improvements in a program, this method is widely used by today’s compilers. This is a general term for a class of analysis methods, which is used to analyze the structure of a single process and decompose it into a series of hierarchical structures called interval [11]. The hierarchical relationship of these structures can be represented by a tree, called the control tree. Many of the analysis and optimizations that follow can be done based on the control tree. 3 is structural analysis: structural analysis is a particularly important and representative one in Interval analysis, and it is used in many compilers or optimization methods, so it is used as a sequential logic analysis method alone. The three analysis methods are all based on the basic unit BB of the sequential logic diagram (CFG). Because the timing logic diagram and BB are known to everyone, their basic concepts are omitted here. Just add a point to the method of identifying BB, the flow is shown in Fig. 1.
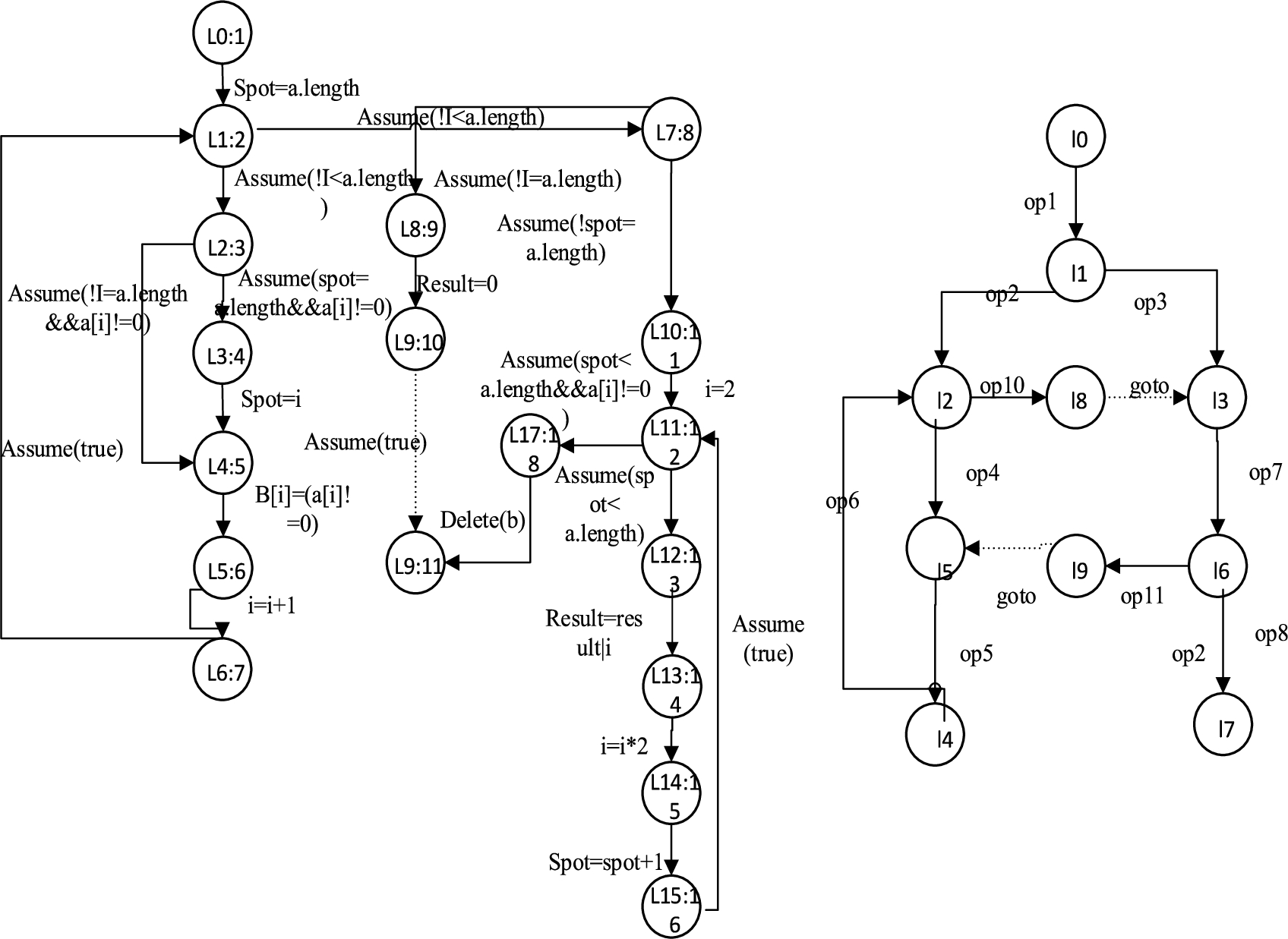
Sequential logic process instance.
In Fig. 1, the number indicates the advantage of depth. First, the serial number is searched. The left letter in parentheses indicates some node of the node. The right side indicates that the spot section algorithm first performs depth-first search on the CFG, and numbers each node in the pre-order traversal order. According to the descending order, use theorem 1 to calculate the value of each node’s spot function in descending order, and use inference 1 to calculate the spot function value of each node. Here, the inference 1 calculates the spot function value in two cases. In the first case, the calculation is performed. Spot(i) is obtained by sdom(i), which corresponds to step 3 of Fig. 2 above; in the second case, spot(u) is not obtained when spot(i) is calculated, and the sequence number is recorded in spot(i) After the descending traversal is completed, the sequence number increment traversal is performed again. At this time, the value of spot(u) must be calculated before spot(i), and can be obtained by
The Network Control System (NCS) is a closed-loop feedback control system formed by a communication network. The networked system has many advantages such as flexible structure, low installation and maintenance cost, etc. For NCS, its task is to estimate the unknown state of the system based on the observed data. In recent years, many achievements have been made in the theory and method of environmental network design. At present, most of the research on robust filtering of NCS is based on a single NCS node, and the network is designed for the problems that may occur in the network environment. According to the randomness of network data loss, the Bernoulli distribution sequence is used to describe the data loss and then the filter is designed. The robust filtering problem of NCS with both data loss and long delay is studied. In the network, there are often many distributed. The structure diagram of the similar or heterogeneous agent node is shown in Fig. 2.

Robust prediction network system block diagram.
The expressions of these conditions for the robust regulator and the structure-free static control network are also different when using other forms of mathematical description. The robust regulator has two parts in its structure, one called the stabilization compensator and the other called the servo compensator. The function of the stabilization compensator is to make the control network implementation structure asymptotically stable. Due to the interaction between the nodes, the measurement of various variables, the acquisition of signals, and the interference between the processing devices, there is a certain degree of coupling phenomenon in the system state measured by the agent. At the same time, each node in the NCS transmits measurement results to the control center via a wired or wireless communication network. Stability is a prerequisite for studying other performance of the system, so it is very important to analyze the stability of the robust control network system. A controller that makes the network implementation structure unbiased is usually a robust regulator.
As shown in the above figure, the robust predictive control system assumes that the system has N network systems. Due to electromagnetic interference and other factors, the network output has a certain degree of coupling phenomenon. When the measurement result of the network node is transmitted to the control center through the communication network, there is data. The package is missing. In a single network, if the switch is at the
Where:
First, a single network sensor and controller are driven by a clock, the period is T, the controller is driven by events; the second is that the output of each network is affected by other networks,
In the above network transmission process, based on the hypothesis, discrete formula (2), Obtain the discrete equations of the robust predictive control system:
Where
Where
The skewed matrix parameter
In the above formula, α is a known constant. It is assumed that
In the above formula, the design method is to explicitly deal with the uncertainty of the model in the process of predictive control rolling optimization. Its online optimization problem usually adopts the minimum-maximum predictive control strategy, and the uncertainty of the model is closely related to the computational complexity [9]. Linked together, usually with the increase of control and prediction time domain, the computational complexity increases exponentially, where
The skewed distribution smoothing method is one of the most used prediction methods and belongs to the deterministic and complete network analysis method. The so-called time series method refers to a set of data arranged in chronological order, using different mathematical models formed by known complete network data, and used to perform prediction methods. The focus of the complete network approach is to study the laws of things that change over time, without ignoring the causes of such changes. By analyzing the continuity, correlation and independence between the complete networks, a prediction model suitable for different sequence trends is established [7]. Representative methods include: motion smoothing method, skewed distribution smoothing method, grey prediction model method, and stochastic completion network method. Among them, the skewed distribution smoothing method is a complete network prediction method developed and established based on the moving average method. It calculates the smoothed value of the skewed distribution and combines certain time series prediction models to predict the phenomenon.
The design of the predictive controller usually has the following methods: one is to change the traditional structure of online optimization; the other is to approximate the online optimization problem, as shown in the following formula (11).
The design problem of
In the network control system, there are many uncertain factors affecting the control performance of the system, such as uncertain delay, external unknown disturbance, random measurement noise, process noise and so on. Uncertainties inevitably reduce system performance and can even lead to system instability. At present, there are three processing methods for the uncertain delays in the network control system, such as fixed delay control, random delay control that satisfies a certain distribution, and uncertain delay control. The fixed delay control method generally determines the uncertain system with time-varying delay by introducing an information buffer at the input of the controller or the actuator; the advantage is that the uncertainty delay is converted into a fixed delay. In this way, it can be designed with the already mature control algorithm, but this method artificially increases the network delay and reduces the performance of the control system. The design method of stochastic control theory that satisfies a random distribution refers to the design of the control system with time delay using stochastic control theory, but the premise delay must satisfy some random points. The parameters
The scheduling algorithm is a set of rules for determining the order of sending information at any time, solving the conflict problem caused by simultaneous access to the network when the sensor data of each object is transmitted, so that the requirements of the network resources are properly allocated by each object, so that the entire network is controlled. The system is able to meet the desired performance requirements. To verify the effect of the unknown disturbance on the control system, a pulse interference signal with

Smooth control response curve with delay problem.
Considering that the network control system with modeling error is asymptotically stable, it indicates that the designed controller has certain suppression ability for the uncertainty caused by the modeling error. Comparing the state responses with delays less than one sampling period and more than one sampling period respectively, it can be known that when there are simultaneous modeling errors and unknown disturbances, although the system’s overshoot, rise time, and adjustment time vary, the system is in a short time. The stable equilibrium point
So far, the problem of solving the robust skewed distribution with smoothed parameter matrices E and F is transformed into a problem of deterministic inequality. However, Eq. (16) is still not a standard LMI problem. To transform (15) into standard LMI problem, solve and design robust control network parameters, we take the following formula (16) decomposition method for matrix P.
Wherein, the dimension of X, Y is:
The advantage of this method is that the number of three-dimensional unstructured mesh nodes on each computing node is basically equal, which increases the data communication between computing nodes. Considering that the calculation of inactive nodes is basically negligible, the method of weighted partitioning is adopted. The weight function of the active node is much larger than the weight function of the inactive node, thus ensuring that the number of active nodes in each partition is substantially equal. The so-called establishment of the data transmission list is to determine the correspondence between the transmission and reception, and establish a list to facilitate accurate and fast data transmission. This method is applied to the robot inspection system, and the calculation master node sends the values of the sub-areas to the corresponding ones. After the node and the time step of each physical time step are iteratively completed, the values of each sub-area are sent back to the computing master node.
State estimation control network simulation
To verify the effectiveness of the designed method, the robust network control system was simulated. Firstly, the network control system is established with uncertain delay, modeling error and control input directly acting on the output system model. Comparing the state responses with delays less than one sampling period and more than one sampling period respectively, it can be known that when there are simultaneous modeling errors and unknown disturbances, although the system’s overshoot, rise time, and adjustment time vary, the system is in a short time. The stable balance point
Considering the distributed network control system, the number of robust control networks is
Process and measurement noise
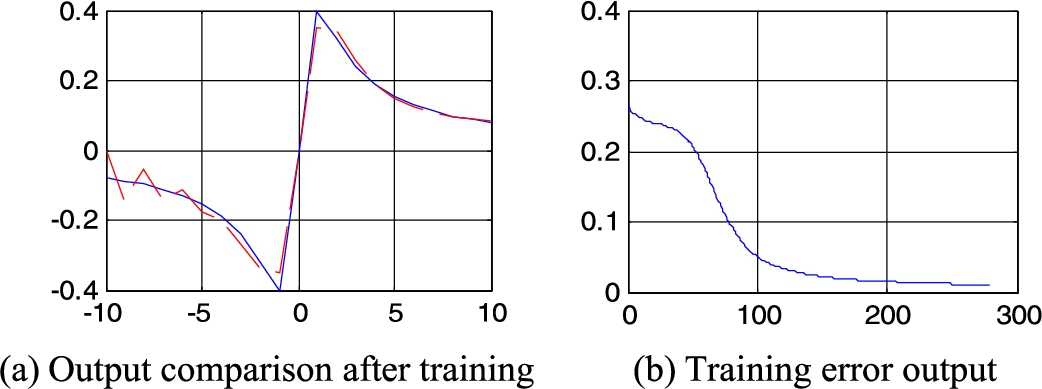
The simulation results are shown in Fig. 4 below, and the actual value of the first state of the robust control network in Fig. 5 is compared with the estimated value. The simulation results verify the effectiveness of the

Smooth control response curve with delay problem.
An adaptive robust
Robust control network error graph.
For the distributed time-delay network systems based on fuzzy models with skewed distribution temporal logic states, it is considered that the time lag shows probabilities in different intervals due to the uncertain inducing factors, and the skewed distribution matrix is used to describe the random probability interval time lag. Create a filter error system with a set of random variables. The time-delay correlation time series logic is used to analyze the stability of the network error system. Combined with the related lemma and LMI technology, the matrix inequalities for the L1 filter can be obtained. The designed fuzzy filter can ensure the filtering error system gradually. Nearly stable and meets a given level of L1 noise rejection. The numerical simulation curve is shown in Fig. 6. The small error in the robustness of our results is a good indication of the robustness of our system. It can be seen from the above figure that the node connectivity in the model has no obvious feature length, which is consistent with the scale-free network characteristics. The connections between the nodes have no typical feature length, but the degree of most nodes is very low. Only a few core parts have very high degrees. By using two independent Bernoulli binary distributions to describe the random one-step delay and packet loss of different channels, the closed-loop NCSs are modeled as an augmented system with a set of random parameters. Finally, the dynamic output feedback based on the skewed distribution system is proposed. Control network design method, the transmission time lag at the time of change allows upper bound, the energy bounded and amplitude bounded interference is selected, other parameters are unchanged, and the upper bound of the time delay is calculated as shown in Table 3.
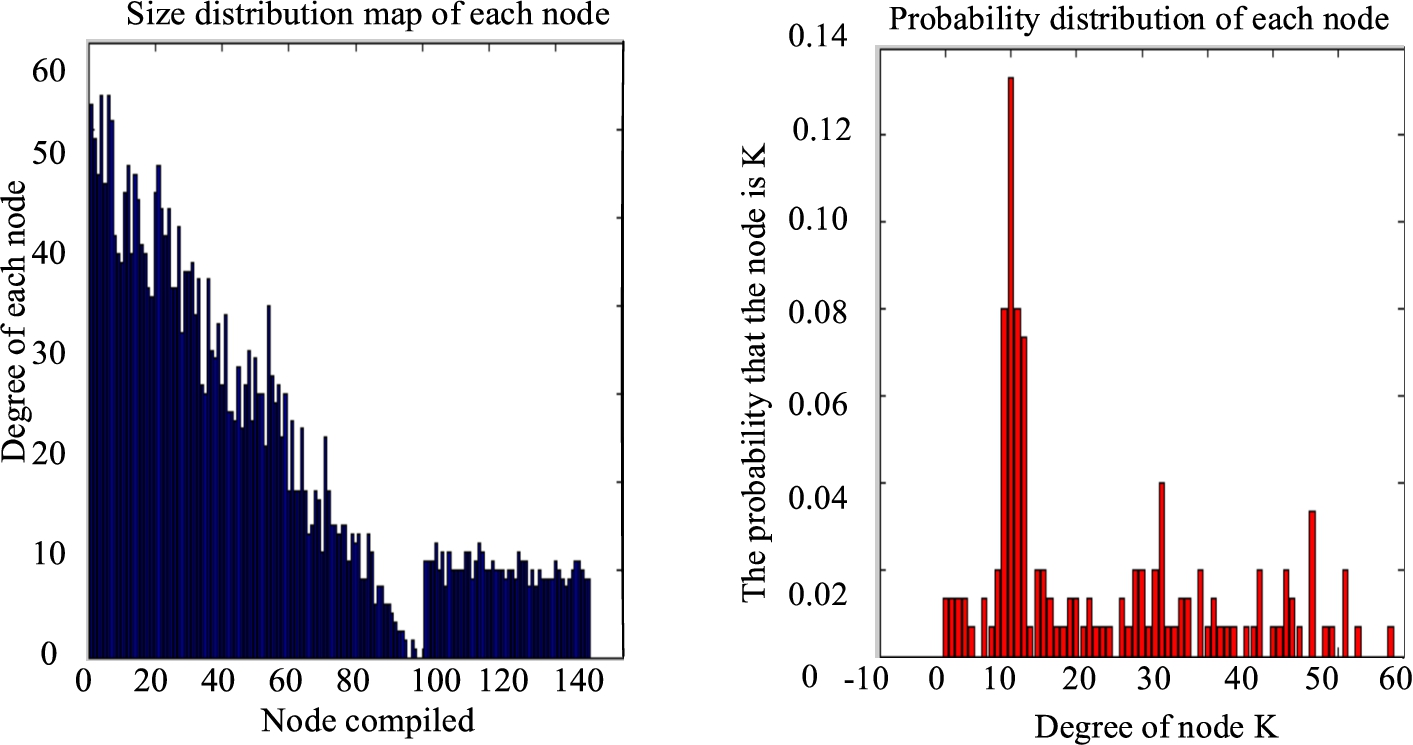
Probability map of each node degree size distribution map and node degree.
Model simulation data sheet
The fuzzy judgment value of the skewed distribution robust control system in four cases can be clearly obtained. In particular, the ideal judgment value obtained by the model satisfies the consistency condition. The interval value is transformed into a random variable under the temporal logic state obeying the skewed distribution. The stochastic simulation and robust control algorithm are used to obtain the optimal solution of the model, which avoids the computational defects of the interval value. It should also be noted that the weights of the ideal fuzzy judgment matrix obtained by Table 3 can be obtained by the conventional weighting model. The control system using the conventional design method has interference from the 5th sampling period. For the delay of more than one sampling period, the response curves of the state variables
Obviously, the design method of using bias prediction controller effectively reduces the regulation time and overshoot of the system, improves the control accuracy of the network control system, and effectively suppresses the effects of modeling uncertainty and external disturbances on the control system.
A robust controller design based on state estimation is proposed for network control systems with uncertain delays and data loss between the sensor and the controller. The state variables of the control system are estimated at each sampling time by using the skewed distribution timing robustness. The controller and the actuator have at least one data update in each cycle. The designed robust controller for skew state estimation not only improves the control precision of the control system, but also reduces the adjustment time of the control system. Moreover, there is no limit to whether the delay is greater than one sampling period, and there is no need to satisfy some random distribution.
This paper mainly proposes an effective sequential logic robust control network for the researched systems that are rarely studied, thus supplementing the existing NCS research. Based on distributed time-delay systems with uncertainties, the robust
Footnotes
Acknowledgements
This study was supported by the Teaching Quality and Teaching Reform Project in Colleges and Universities of Anhui Province – High level teaching team (no. 2018jxtd044) and the Key Topics of Anhui Education Department – Research on big data analysis method of university teaching based on spark distributed computing platform (no. KJ2019A0965).
Conflict of interest
The author has no conflict of interest to report.