
Abstract
In this paper, a Takagi-Sugeno (T-S) fuzzy hyperbolic model is proposed for the fuzzy control of a class of nonlinear systems. The consequence of the proposed model is a hyperbolic tangent dynamic model, and it is employed to represent the nonlinear system. By constructing a new Lyapunov function, the stability conditions of the open-loop T-S fuzzy hyperbolic system are derived via linear matrix inequalities (LMIs). Then, the parallel distributed compensation (PDC) method is used to design a fuzzy hyperbolic controller, and the asymptotic stability conditions of the closed-loop system are formulated via LMIs. The main advantage of the control based on T-S fuzzy hyperbolic model is that it can achieve small control amplitude via “soft” constraint control approach. Finally, the effectiveness and advantage of the proposed schemes are illustrated by a mathematical constructive example and the Van de Vusse example.
Keywords
Introduction
As is well known, fuzzy logic system utilizing fuzzy sets and fuzzy inference to process uncertain information is an effective way of processing complex nonlinear systems. In particular, the fuzzy control technique based on the so-called Takagi-Sugeno (T-S) fuzzy model [27, 37] has been widely employed for the control design of nonlinear systems [12], since the classical linear system theory can be applied to the analysis and controller synthesis of nonlinear systems. The fuzzy-model-based technique has been used to discuss the stability performance [3, 10, 28], filter design [4, 38] and tracking control [6, 7] issues of fuzzy control systems in an extensive literature. Recently, some novel T-S models have been proposed, for example, T-S fuzzy bilinear model [14, 36] and T-S fuzzy nonlinear model [24–26, 32] were proposed for a class of nonlinear systems, respectively.
It can be seen that existing literatures based on the T-S fuzzy model are usually concerned with the system performances, such as stability, robustness, tracking, and so on [11, 18]. However, the issue of constraint on control input is seldom mentioned. Notice that for practical application any designed controller for dynamic systems should be designed such that it guarantees the stability of systems with requiring permissible magnitude of control inputs [39, 41]. In [41], under the T-S fuzzy model structure, adequate methods were proposed to tackle the crane’s control problem with different engineering constraints. Thus, it is important to concern the issue of constraint on control input while studying dynamic systems.
In general, the approaches of constraint control include model predictive control (MPC) [1, 8, 21, 29, 33], control with saturation nonlinearity [9, 41] and probabilistic control [31]. These methods usually change the constraint control into optimization problems. However, the fact that most real-life problems in science, engineering, optimization problems consist of one or more linear, non-linear, non-convex, and discontinuous constraints results in that the problems are very complex or even unable to be solved [31]. For instance, the classical MPC formulation does not provide a systematic way to deal with model uncertainties and disturbances. Moreover, min-max policies, as its most ordinary method, are often computationally demanding, and the resulting control law may be too conservative [8]. Based on the T-S fuzzy model, a few results on MPC have been discussed in [21, 33]. Very recently, [5] was to relax the stabilization conditions for the discrete T-S fuzzy system with constraints on the control input. The possible switching subregions fired by two successive states of the system were analyzed and utilized to reduce the stabilization conditions. The interactions of fuzzy subsystem within two subregions are integrated into a single matrix to relax the stabilization conditions. Han et al. [22] addressed the problem of state/fault estimation and fault tolerant control for a class of Takagi-Sugeno fuzzy systems subject to simultaneously external disturbances, sensor and actuator faults. A fuzzy-reduced-order robust state/fault estimation observer was proposed and an observer-based fault tolerant controller was designed to compensate the fault effect and guarantee the stability of closed-loop system. A fault tolerant saturated control (FTSC) problem for discrete-time T-S fuzzy systems with delay was studied in [2]. Sucient conditions for observer based control design with saturation constraints were developed. It maintained asymptotic stability even in the presence of both permanent sensor faults and saturation on the control. Thus, the main existing approaches on constraint control have their own drawbacks. This motivates us to establish a new T-S model to solve constraint controlproblems.
Recently, a fuzzy model called fuzzy hyperbolic model (FHM) was presented for a class of complex nonlinear systems in [17]. Based on the model, numerous research results have been reported in [15]. The state equation of the model is comprised of the hyperbolic function of state variables and the linear function of input variables. Based on the model, the corresponding controller is designed as the form of u = H tanh(Kx) for some constant matrices H. It is easy to see that the control law is bounded for all x, since the range of each component in vector tanh(Kx) belongs to [- 1, 1], and ∥H tanh(Kx)∥ ≤ ∥ H ∥ for all x. In fact, this kind of nonlinear feedback controller is more reasonable in practical application. Thus, the FHM and controller design approach based on the model have some reference for dealing with the issue of constraint control. On the other hand, the T-S fuzzy model [27, 37] has been an effective and powerful way for modeling of complex nonlinear systems [19]. More recently, Motivated by these two observations, we establish a new T-S model, namely, T-S fuzzy hyperbolic model for complex nonlinear systems by using the modelling framework of T-S fuzzy model. The consequence of the model is a hyperbolic tangent dynamic model. Then, a fuzzy hyperbolic controller can be designed to deal with the issue of constraint control for nonlinear systems.
In this paper, a T-S fuzzy hyperbolic model will be established to deal with the stabilization of a class of nonlinear systems under small control input. Firstly, a T-S fuzzy hyperbolic model whose consequence is a hyperbolic tangent dynamic model is presented to represent the nonlinear systems. Secondly, a fuzzy hyperbolic controller is designed via the PDC method to stabilize the T-S fuzzy hyperbolic system. Using some good properties of hyperbolic tangent function, a new Lyapunov function is constructed. In this case, the design techniques in linear control theory can be extended to the analysis and synthesis of nonlinear systems, and the sufficient conditions can be derived in terms of LMIs to guarantee the asymptotic stability of the closed-loop system. Finally, the effectiveness and advantage of the control approach based on T-S fuzzy hyperbolic model are illustrated by two simulation examples, in which some comparisons between the T-S fuzzy hyperbolic model and the T-S fuzzy linear model are made.
It should be pointed out that, with a T-S fuzzy hyperbolic model and a new Lyapunov function, the constraint control strategy is designed for a class of nonlinear system. Since the local control law is u (t) = H
j
tanh(kx (t)), and the overall fuzzy hyperbolic control law is achieved by smoothly blending of these local control laws together through the membership functions, i.e.,
The rest of the paper is organized as follows. Section 2 establishs a new T-S model called T-S fuzzy hyperbolic model and analyzes the stability of the open-loop system. The T-S fuzzy hyperbolic model is employed to the stabilization of a class of nonlinear systems in Section 3. In Section 4, two simulation examples are proposed to illustrate the effectiveness and advantage of the design approach based on T-S fuzzy hyperbolic model. Section 5 concludes this paper.
Modeling and stability analysis of a T-S fuzzy hyperbolic model
Modeling of a T-S fuzzy hyperbolic model
The T-S fuzzy model [27, 37] has been widely employed to deal with the analysis and synthesis of nonlinear systems. In this subsection, a T-S fuzzy hyperbolic model will be presented to represent the nonlinear systems. This fuzzy model is described by fuzzy IF-THEN rules which express local dynamics using a hyperbolic tangent model. The overall fuzzy system is obtained by fuzzy smoothly “blending” of the local hyperbolic tangent models. The i-th rule of the T-S fuzzy hyperbolic model is of the following form:
Plant Rule i:
IF s1 is Fi1, and ⋯ and s g is F ig ,
THEN
By using the fuzzy inference method with a singleton fuzzifier and product inference and center average defuzzifies, the overall T-S fuzzy hyperbolic system can be written as
When u (t) =0, we can obtain the following open-loop system from fuzzy system (2):
Follow the Lyapunov stability theorem, the stability conditions of system (3) are derived as following theorem.
The time derivative of V (t) is computed as
Substituting (3) into (6), we have
Since tanh(kx (t)) =0 if and only if x (t) =0 for k
i
> 0, i = 1, 2, …, n, thus, if LMIs (4) holds, then
The objective of this section is to design a fuzzy hyperbolic controller such that the T-S fuzzy hyperbolic system (2) is globally asymptotically stable under small control amplitude.
Based on the T-S fuzzy hyperbolic model and the PDC method [27], the following fuzzy hyperbolic controller is designed:
Control Rule j:
IF s1 is Fj1, and ⋯ and s g is F jg ,
THEN
Thus, the overall fuzzy hyperbolic control law is represented by:
Substituting (9) into (2), the overall closed-loop system can be expressed as
The asymptotic stability conditions of closed-loop system (10) are summarized as follows.
It is assumed that
Pre- and post-multiplying both sides of (14) by P-1, and denoting Q = P-1, M
i
= H
i
Q, we have
Applying a similar procedure to
In this section, we shall give two examples to show the effectiveness and advantage of the design approach based on T-S fuzzy hyperbolic model. The first one is a mathematical constructive example, and the second one is an isothermal continuous stirred tank reactor (CSTR) for the Van deVusse example.
where
By solving LMIs (11) and (12), the diagonal positive definite matrix and controller gain matrices are obtained as: P = diag {1.6433, 1.9251},
In order to compare the T-S fuzzy hyperbolic model with the T-S fuzzy linear model [27], the system matrices A i , B i , i = 1, 2, 3, 4, the initial condition and the membership functions for T-S fuzzy linear system are the same as those in T-S fuzzy hyperbolic system (eq23).
Following the stable fuzzy controller design approach for continuous T-S fuzzy linear system in [27], the fuzzy control law can be obtained as follows:
The state responses and control curves of the two fuzzy systems are shown in Figs. 1 and 2, where the initial condition is x (0) = [3 - 1] T . From the simulation results, we can see that the stabilization time of the two systems are nearly the same. However, the control input of the T-S fuzzy hyperbolic system is much smaller than that of the T-S fuzzy linear system, which is the advantage of the design approach based on T-S fuzzy hyperbolic model.

State responses of Example 1 (TSFHS: T-S fuzzy hyperbolic system; TSFLS: T-S fuzzy linear system).
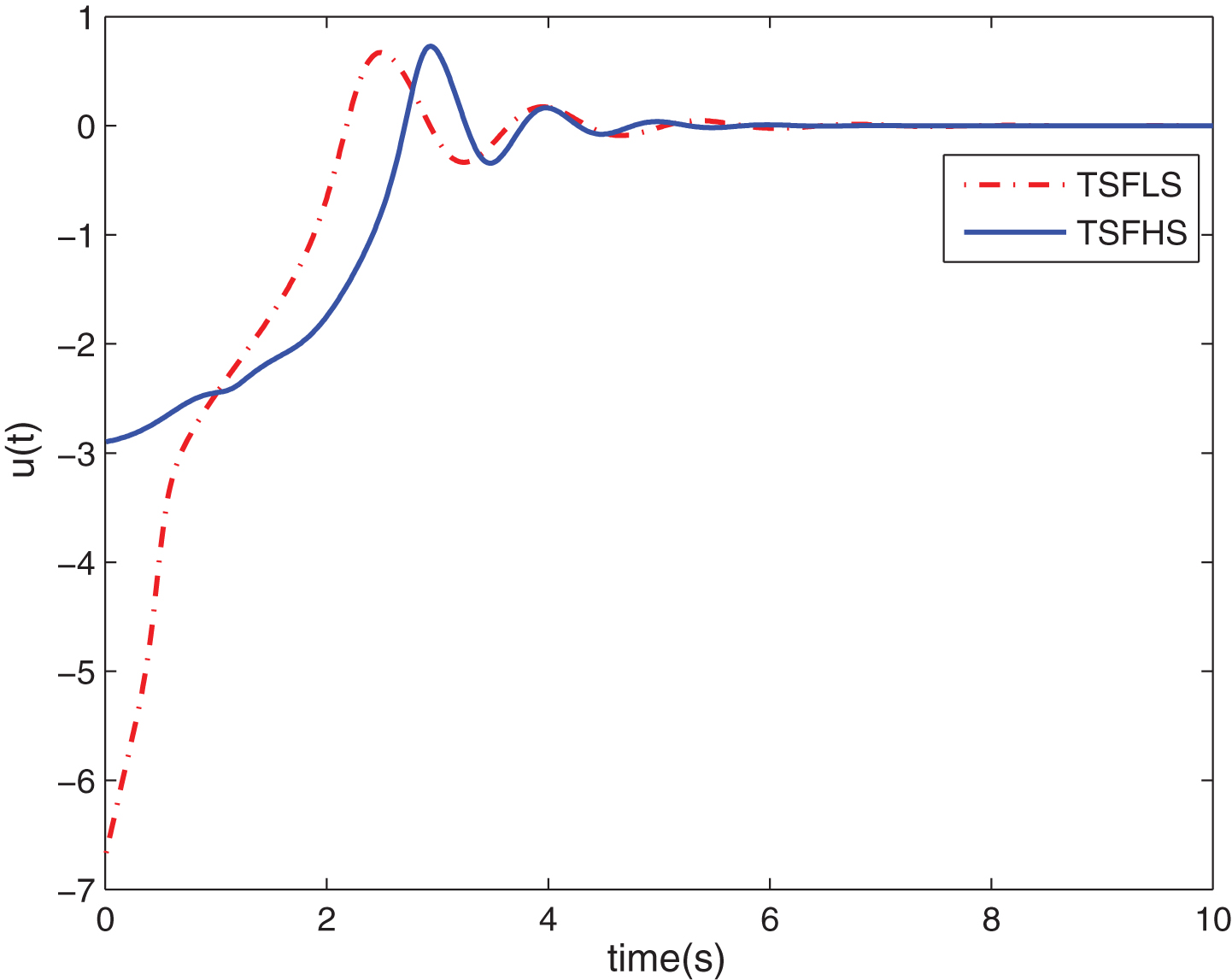
Control curves of Example 1.
In the following, the kinetic parameters are chosen as: k1 = 50 h-1, k2 = 100 h-1, k3 = 10 L/ - (mol · h),CA0 = 10 mol/ - L. In addition, V = 1 L is the same as that in [35].
Some equilibrium points of system (18) are tabulated in Table 1. Under these equilibrium points, [x
e
u
e
], which are also chosen as the desired operating points, [x
d
u
d
], the T-S fuzzy-model-based modeling method in [30] is employed to construct all system matrices when we represent the system (18) by using T-S fuzzy linear model [27, 37]. Based on the modeling method in [30], one can obtain
Equilibrium Points
Applying [[30], Equations (11) and (12)] to system (18) in operating points, the system matrices A i , B i , i = 1, 2, 3 can be obtained. The system matrices A i , B i , i = 1, 2, 3, are the same as those in T-S fuzzy linear model when we represent the system (18) by using T-S fuzzy hyperbolic model. Thus, the fuzzy hyperbolic laws can be represented by
R1: IF x1 is 2.9368
THEN
R2: IF x1 is 4.4816
THEN
R3: IF x1 is 6.1706
THEN
where
By solving LMIs (11) and (12), one can figure out diagonal positive definite matrix
Following the stable fuzzy controller design approach for continuous T-S fuzzy system in [27], we can figure out the positive symmetric matrix
The membership functions of state x1 are shown in Fig. 3 and

Membership functions of x1.
Thus, the whole fuzzy hyperbolic control law is
We choose u
d
= 77.0000 and the operating points as

State responses of original system (18) (TSFHM: T-S fuzzy hyperbolic model; TSFLM: T-S fuzzy linear model).

Control curves of original system (18).
This paper has established a T-S fuzzy hyperbolic model whose consequence is a hyperbolic tangent model, and it was employed to the stabilization of a class of nonlinear systems under small control amplitude. First, A new Lyapunov function is utilized to the stability analysis of the open-loop system, and the asymptotic stability conditions are derived via LMIs. Then, the PDC method is used to the fuzzy controller design of the T-S fuzzy hyperbolic system. Moreover, some sufficient conditions are derived via LMIs to guarantee the asymptotic stability of the closed-loop system. Finally, two simulation examples show the effectiveness and advantage of the proposed approaches. Comparing with the control approach based on T-S fuzzy linear model, the design approach based on T-S fuzzy hyperbolic model can achieve much smaller control amplitude in the case of the state stabilization time is almost the same.
Footnotes
Acknowledgments
This work is supported by the National NaturalScience Foundation of China under Grant No. 60974139 and 61573013.