
Abstract
In most of the data analysis tools, the sensitivity toward noise exists. Since real data is always contaminated by noise, a preprocessing technique to reduce noise is of interest. We propose a new method to eliminate noise using the fuzzy wavelet technique. We decompose a function using fuzzy wavelets to extract detail and approximation coefficients. Consequently, we threshold the detail coefficients to reduce the effect of noise and reconstruct a denoised signal. This new method exhibits robust behavior even applied for signals with a very small signal to noise ratio. It shows better results compared to ordinary wavelet denoising and fuzzy denoising on very irregular data. We apply the proposed method to noise reduction in audio signals and compare it with ordinary wavelet denoising. The obtained results are satisfactory.
Introduction
On one hand, real-world data is always corrupted by noise. Since most of the data analysis tools are sensitive to noise, it is very important to perform a preprocessing to reduce noise before using these tools. On the other hand, wavelet denoising techniques are popular techniques for signal extraction and denoising (see for instance, [4, 17, 20]).
Consider the following noisy model:
Singular Spectral Analysis (SSA) can be considered as an effective nonparametric tool to denoise noisy signals [19] but it is only efficient for very smooth models with a high signal to noise ratio.
Several types of transformations such as Fourier, Laplace and wavelet are used as effective tools to construct an approximation of a model. The core idea of these tools consists in transforming an original function space into a space with simpler computations. The inverse transform produces either the original function (perfect reconstruction) or its approximation.
Using ordinary wavelet transform, we estimate f or denoise Y with the following steps:
Hereafter, wavelet denoising method is denoted by (WD). For more details about this method see [3, 20].
As we can see in these papers, this method works well in most cases. Nevertheless, for small signal to noise ratio (SNR) or for an irregular function of interest, WD method does not give satisfactory result. To illustrate this fact, see the following example. Consider the model Y
i
= sin(2i) + ɛ
i
where
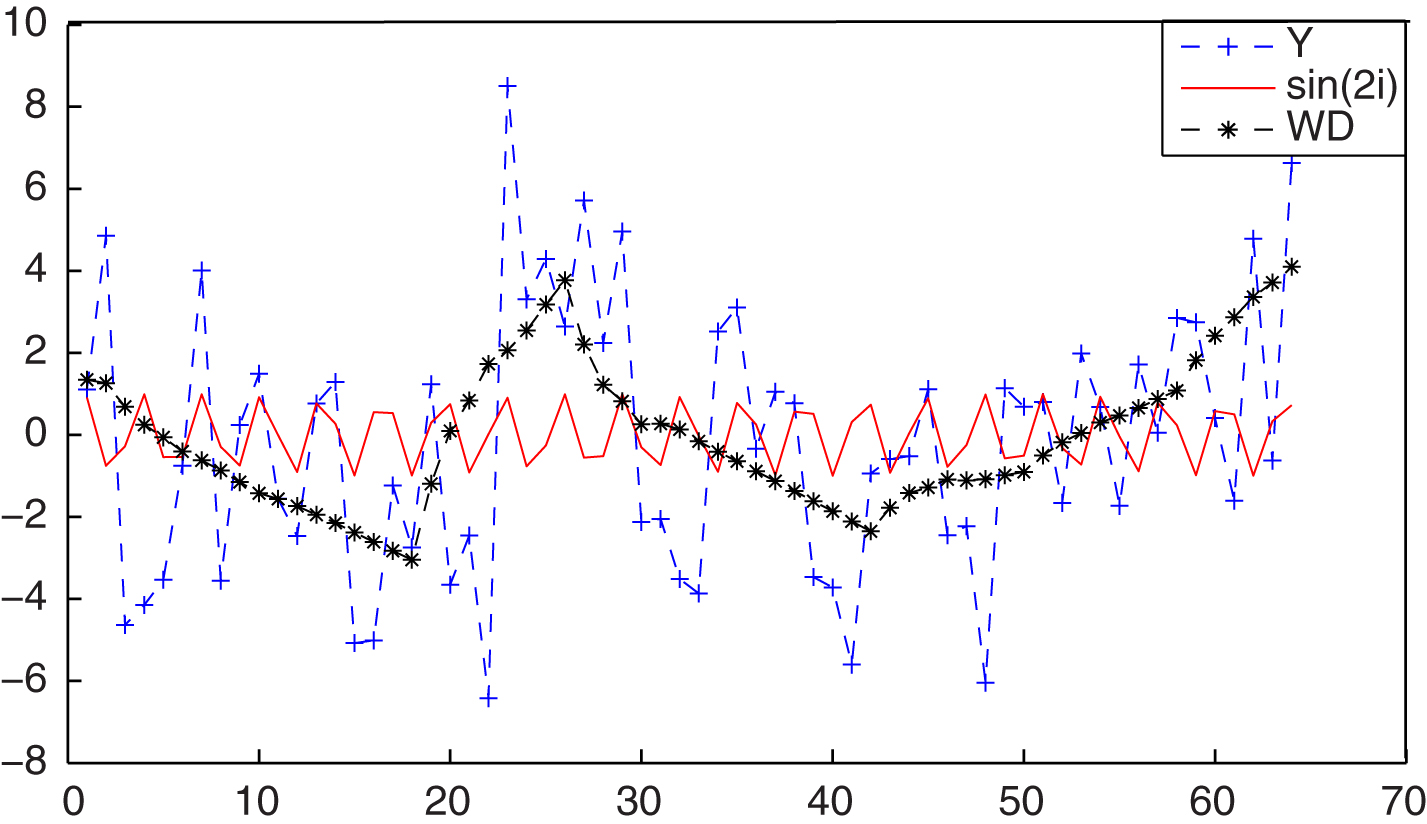
Wavelet denoising of Y i = sin(2i) + ɛ i (shown by ‘+’), sin(2i) (solid curve) and WD (shown by ‘*’).
Since the noise level is high, WD method cannot approximate f well. Hence for some functions and models, we need to use a method to denoise with more precision.
Perfilieva [11] developed three techniques for fuzzy transform (or, shortly, F-transform). The main idea of F-transform is a fuzzy partition of the domain into fuzzy subsets. A simple approximation of the original function is accessible via the inverse formula of the F-transform.
Perfilieva and Hodakova [10] proved that the inverse F-transform has efficient filtering properties. Beg and Aamir [8] developed the notion of fuzzy wavelets and proved a theorem establishing properties of fuzzy wavelets using filtering properties of F-transform. They have extended fuzzy multiresolution analysis schemes to the fuzzy wavelets.
The structure of the paper is as follows. In Section 2, the concept of fuzzy partition, F-transform, inverse F-transform and fuzzy wavelet transform are introduced. In Section 3, fuzzy wavelet denoising is proposed. Section 4 contains some simulation examples to compare fuzzy wavelet denoising, ordinary wavelet denoising and fuzzy denoising. The proposed method is applied to audio signals in Section 5. The paper is concluded in Section 6.
The F-transform is a transformation that can be applied to a continuous function with a bounded domain or discrete function with a finite domain. The domain of function is partitioned to fuzzy sets. The F-transform takes a function and transfers it to a real vector, i.e. it produces a set-to-point correspondence between the partitions and the average values of the function. Let [a, b] be the space of points, a fuzzy set 𝒜 in [a, b] is characterized by a membership function A (x) which associates each point in [a, b] to a real number in the interval [0, 1]. The value of A (x) represents the “grade of membership” of x in 𝒜.
Suppose the domain of a function is the interval [a, b]. In what follows, the fuzzy partition is given by fuzzy subsets of this interval.
Let x1 < … < x
n
be fixed real numbers in the interval [a,b] such that x0 = a, xn+1 = b and n ≥ 2. Let 𝒜1, …, 𝒜
n
be the fuzzy sets characterized with their membership functions A1 (x) , …, A
n
(x). They constitute a fuzzy partition of [a,b], if they satisfy the following conditions for k = 1, …, n: A
k
: [a, b] → [0, 1] , A
k
(x
k
) =1; A
k
(x) =0 if x ∉ (xk-1, xk+1); A
k
(x) is continuous; A
k
(x) is strictly increasing on [xk-1, x
k
] for k = 2, …, n, and A
k
(x) is strictly decreasing on [x
k
, xk+1] for k = 1, …, n - 1; ∀ x ∈ [a, b],
The membership functions A1 (x) , …, A
n
(x) are called basic functions. If the points x1, …, x
n
are equidistant then the fuzzy partition 𝒜1, …, 𝒜
n
, n > 2, is uniform, i.e. x
k
= a + (k - 1) h, k = 1, …, n, where A
k
(x
k
- x) = A
k
(x
k
+ x), for all x ∈ [0, h]; A
k
(x) = Ak-1 (x - h), for all x ∈ [x
k
, xk+1] and Ak+1 (x) = A
k
(x - h), for all x ∈ [x
k
, xk+1].
Let f be any continuous function in [a, b] and S△x,n = {A1,△x, …, An,△x} be a set of basic functions which form a fuzzy partition of [a, b] where △x is the support of each basic function. We say that the n-tuple of real numbers [ℱ1, …, ℱ
n
] given by:
The inverse F-transform of a function f (with respect to A1, …, A
n
) is a linear combination of the F-transform components ℱ
n
[f] = [ℱ1, …, ℱ
n
] and A1, …, A
n
. Then the function:
We can reconstruct the function from its F-transform components by inverse F-transform but we lose some information because this is not a perfect reconstruction [11].
For a function f given at points p1, p2, …, p
l
∈ [a, b], we define its discrete F-transform by n-tuple of real numbers [F1, …, F
n
] if we use a summation instead of the integral in Equation (2). Therefore, the discrete F-transform of the function f is given as follows with respect to basic function A1, …, A
n
, n ≤ l:
In the case of discrete F-transform, we define the inverse F-transform only at points where the original function is given:
Let A (x) be a fuzzy basic function but centered at the first point, i.e., k = 0; such that, A
k
(x) = A (x - x
k
) = A (x
k
- x). The shift operator R
k
is defined as follows:
The components of F n [f] are weighted mean values of f where the weights are given by the basic functions. For each value of p i in (xi-1, xi+1), we have a different approximation of the original function [11].
We consider p
i
= i for i = 1, …, l and we normalize the values of A by dividing them by
In this case, F k is a convolution of two functions f and A i.e., F k = A ∗ f.
If A (x) be a fuzzy basic function, its reflection,
Let
For fuzzy wavelet transform orthonormality holds in the fuzzy sense i.e., basic functions are approximately orthonormal. As a result, there was not a perfect reconstruction with an approximation of the original function.
To obtain next stages of decomposing Y, we consider n as the maximum number of fuzzy basic functions to approximate f (x) such that it is divisible by 2
p
, where
For different values of j, we get different approximations of functions. It is called fuzzy multiresolution analysis of a function. Therefore,
In general, a set of fuzzy orthonormal basis is of the form
If we consider
The recursive algorithm of fuzzy wavelet transform can be obtained as follows, [8]:
Figure 2 shows the decomposition and reconstruction algorithm of the j th stage of fuzzy wavelet transform.
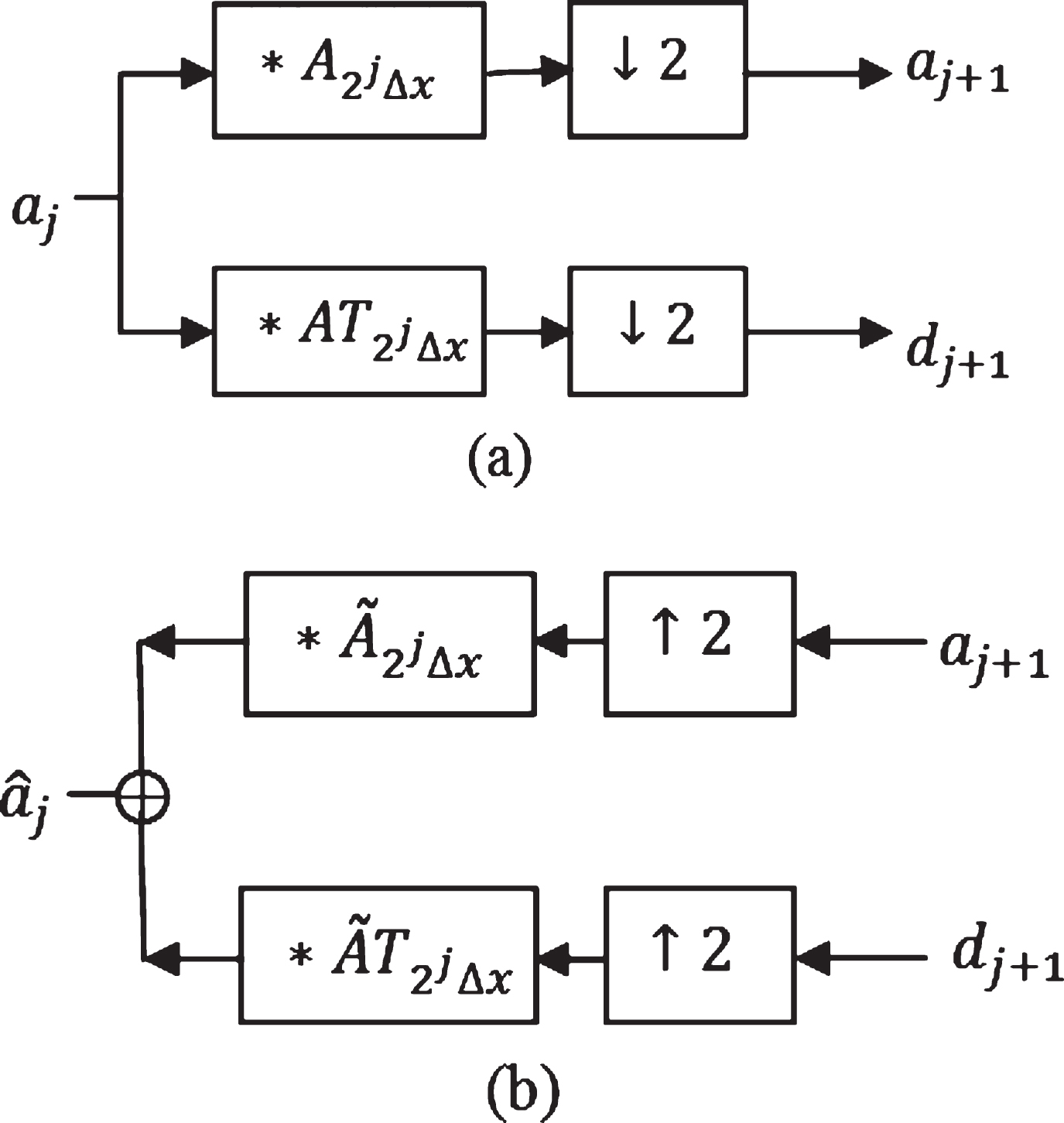
Representation of a fuzzy wavelet decomposition and reconstruction step where convolution, decimation and upsampling are denoted by ∗, ↓2 and ↑2, respectively.
We consider the usual nonparametric model:
We apply our method to the example explained in Section 1. In Fig. 3, we can see the denoised version of Y i = sin(2i) + ɛ i based on the ordinary WD and the proposed method, i.e. Fuzzy Wavelet Denoising (FWD). In this figure, sin(2i), WD and FWD are denoted by dashed line, ‘∗’ and solid curve respectively. As it is evident, our method gives better results than WD.
Fuzzy wavelet and ordinary wavelet denoising of Y i = sin(2i) + ɛ i . FWD fit (solid curve) and WD fit (‘∗’) and sin(2i) (dashed line).
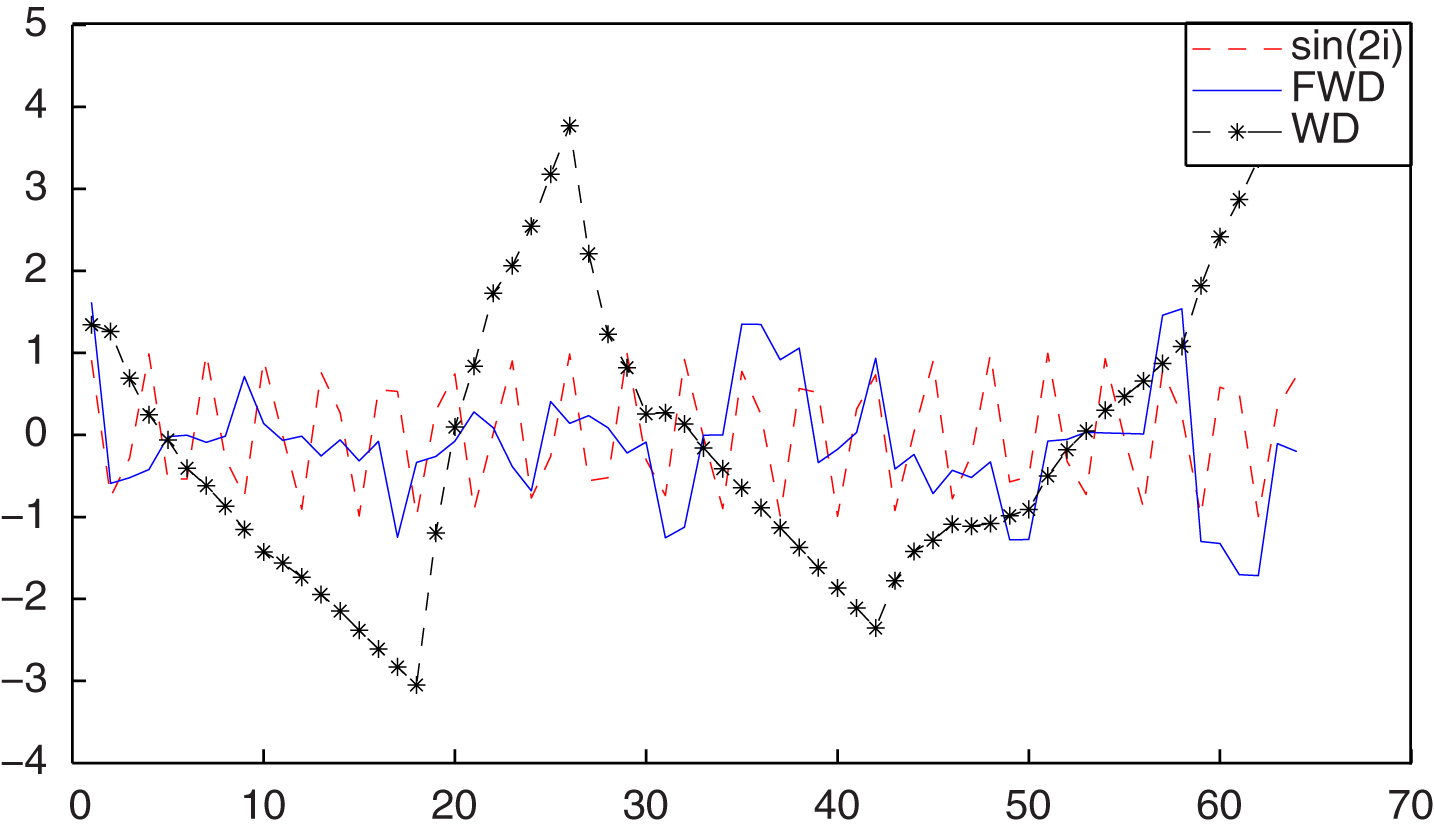
In this example, since f is a periodic function, Fourier based denoising seems to be a good candidate. Figure 4 shows Fourier denoising (i.e., thresholding the Fourier coefficients by universal threshold) and our method for Y i = sin(2i) + ɛ i . In this figure, sin(2i), Fourier denoising and FWD fit are denoted by dashed line, ‘∗’ and solid curve respectively.

Fuzzy wavelet and Fourier denoising of Y i = sin(2i) + ɛ i . FWD fit (solid curve) and Fourier denoising fit (‘∗’) and sin(2i) (dashed line).
As it is shown in Figs. 3 and 4, our method works better than both Fourier denoising and ordinary wavelet denoising methods. The comparison of these three methods for 50 iterations is displayed in Section 4.
Let us provide more comments on step 2 of the FWD algorithm. When detail coefficients are small, it could be due to noise and can be ignored without affecting the estimation of f substantially. Thus, the idea of thresholding fuzzy wavelet coefficients is a way of cleaning out insignificant details. There are a variety of methods to choose a threshold denoted by λ. The threshold depends on the noise level and therefore, an estimate of the noise variance, σ2. A robust estimator of σ (based on the median absolute deviation) is given by [3, Chapter 6]:
We use the universal threshold where the name of the universal threshold given by Donoho and Johnstone [4] to
Therefore, based on this lemma, after decimation we have:
As it is mentioned before, scripfontD denotes the decimation operator. For j-th stage we have:
The function A (x) in Equation (13) works as a weight in this transform since fuzzy wavelet characterizes some local characteristic of the original function. For instance, precise values of independent variables in nonparametric regression problem are factorized or fuzzified by a “closeness” relation like “approximately 2”, and precise values of dependent variables (nonparametric regression function values) are averaged to an approximate value. Therefore, the following theorem is established.
For j-th stage, based on Equation (12) the mean of dj,m is obtained as follows:
Also, the covariance of d1,l and d1,m is computed as follows:
Since convolution is a linear mapping and all properties of normal distribution are preserved, hence,
Since d j s are colored noise with a different variance in each level, we have to use level-dependent thresholding [9, 18]. It means that we estimate the variance of the noise based on detail coefficients of each level. We can calculate λ, the threshold of each level, through the estimator of the variance of the same level.
Figure 5 shows a scheme of our proposed method for one level decomposition.

A scheme of our proposed method for one level decomposition.
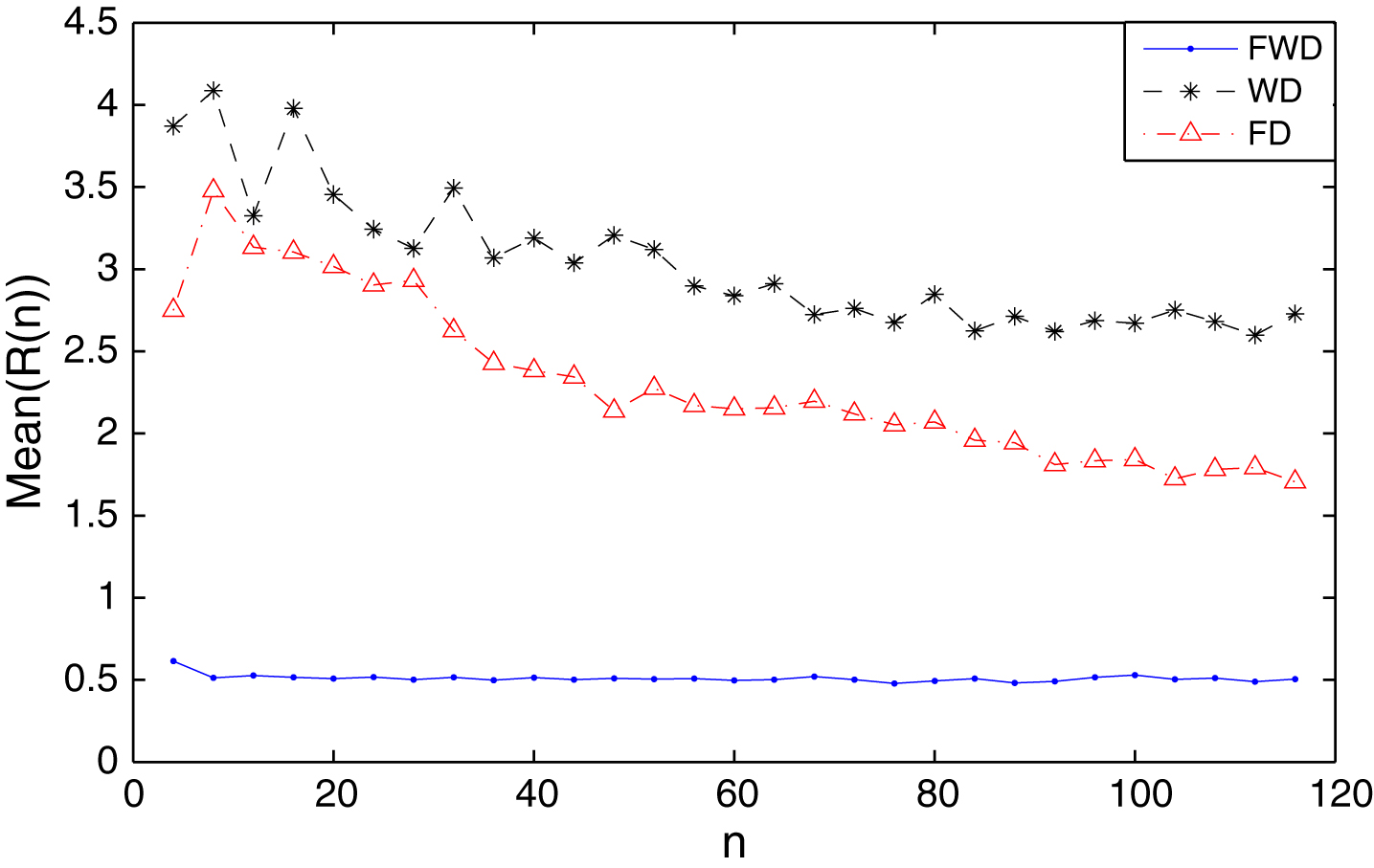
In this section, we compare WD, FWD and Fuzzy denoising (F-transform denoising i.e,. thresholding the F-transform coefficients by universal threshold) through Mean Square Error (MSE) on simulations based on bench mark examples in the MATLAB software. MSE is estimated by:
Mean(R) for FWD, WD and Fuzzy-D methods with sample size 128
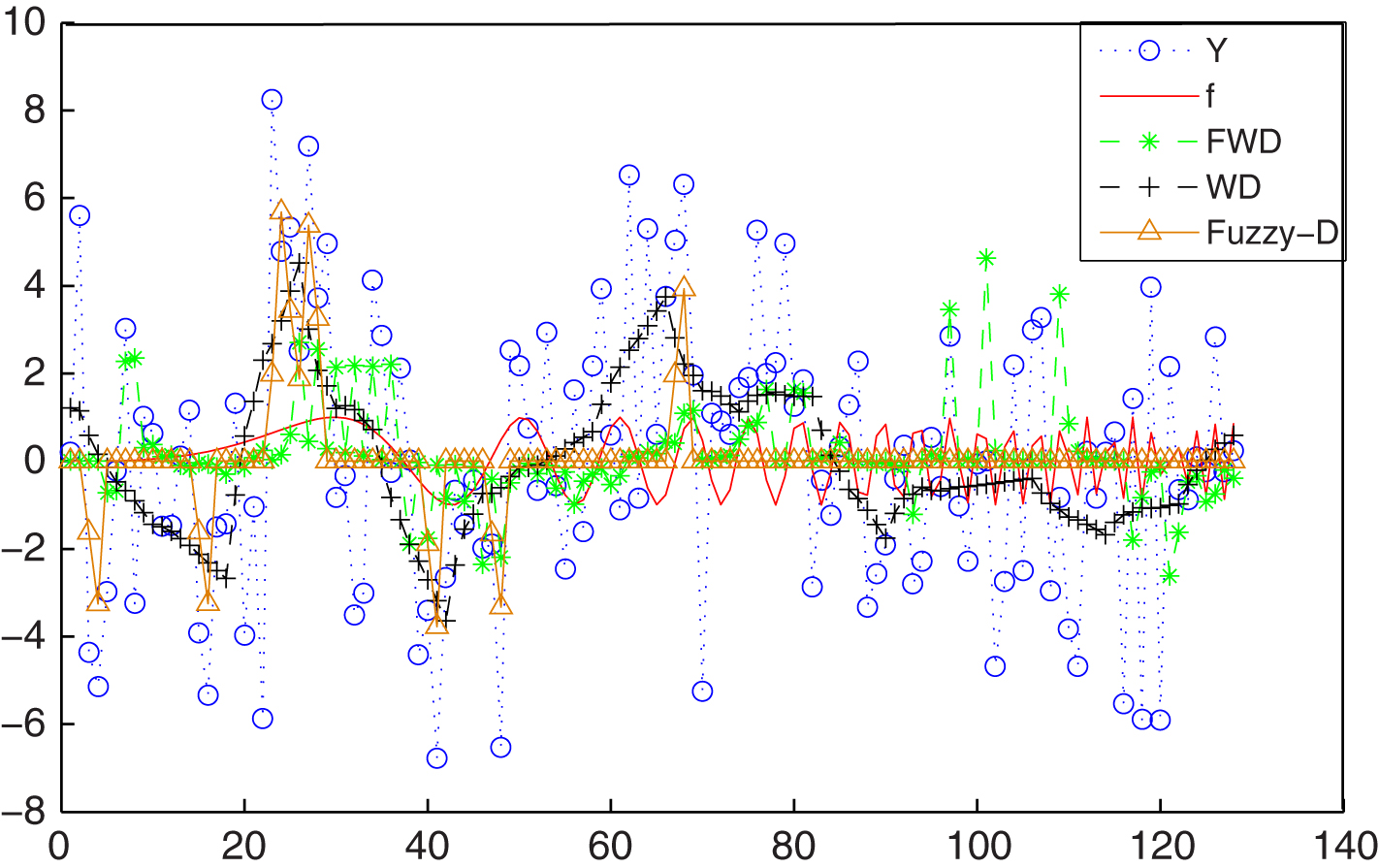
Figures 6, 7 and 8 show denoised signals of noisy Doppler, Quadchirp and Mishmash respectively based on FWD, WD and Fuzzy-D methods for an iteration where ‘∘’, ‘-’, ‘∗’, ‘+’ and ‘▵’ represent Y, f, FWD, WD and Fuzzy-D, respectively. Although the SNR of all these examples is low, our method works well and outperforms WD and Fuzzy-D methods.
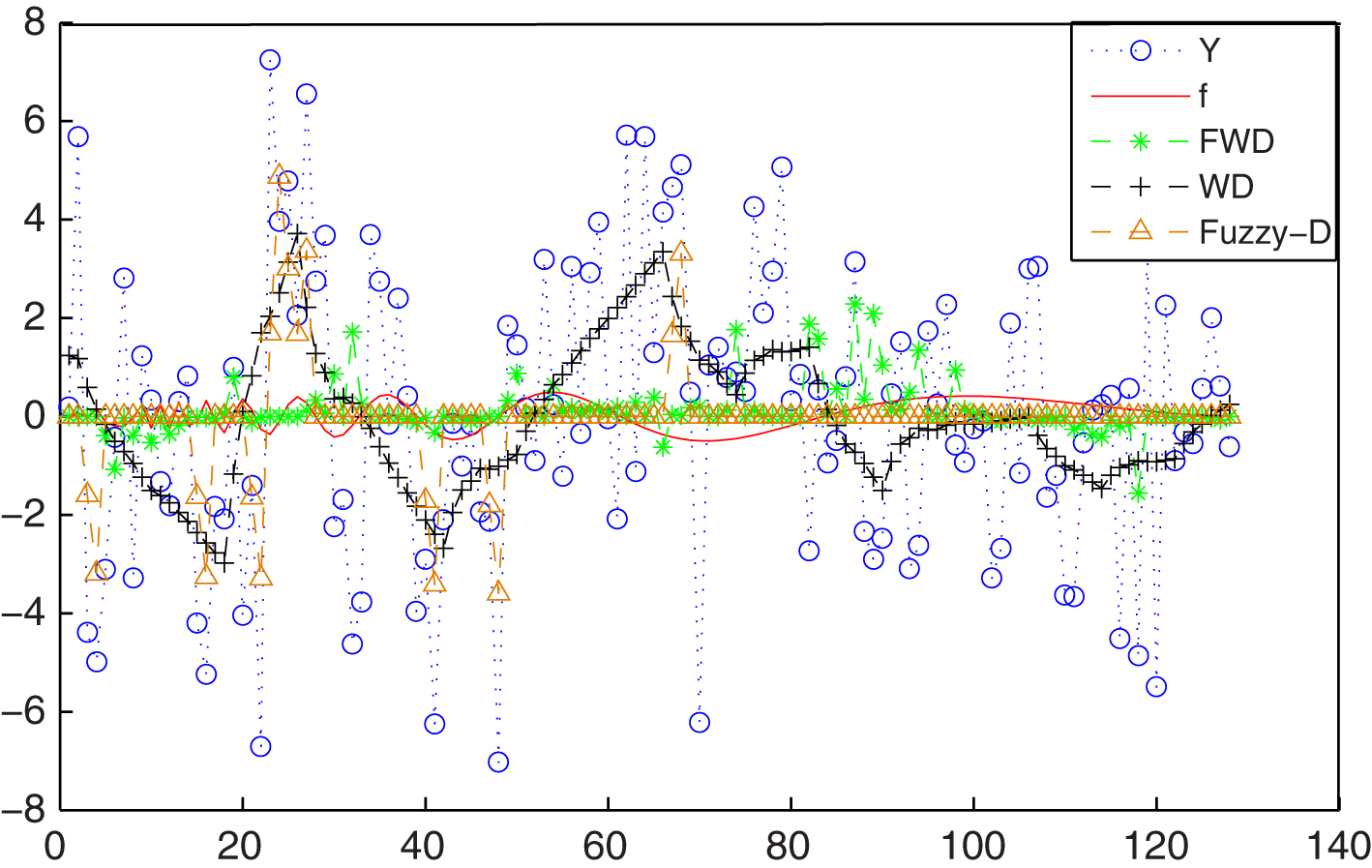
Denoising of Doppler signal contaminated by Gaussian noise using FWD, WD and Fuzzy-D methods. Y is denoted by ‘∘’, f by solid curve, corresponding FWD, WD and Fuzzy-D results by ‘∗’, ‘+’ and ‘▵’, respectively.
Denoising of Quadchirp signal contaminated by Gaussian noise using FWD, WD and Fuzzy-D methods. Y denoted by ‘∘’, f by solid curve, corresponding FWD, WD and Fuzzy-D results by ‘∗’, ‘+’ and ‘▵’, respectively.

Denoising of Mishmash signal contaminated by Gaussian noise using FWD, WD and Fuzzy-D methods. Y denoted by ‘∘’, f by solid curve, corresponding FWD, WD and Fuzzy-D results by ‘∗’, ‘+’ and ‘▵’, respectively.
In addition, in these examples we compar the standard deviation of R (denoted by std (R)) for FWD, WD and Fuzzy-D methods and their results are summarized in Table 2. The best performance corresponds to our method.
std(R) for FWD, WD and Fuzzy-D methods with sample size 128
Figures 9, 10 and 11 show boxplots of R for Doppler, Quadchirp and Mishmash respectively based on FWD, WD and Fuzzy-D methods. As we can see in Figs. 9, 10 and 11, our method outperforms the other methods.
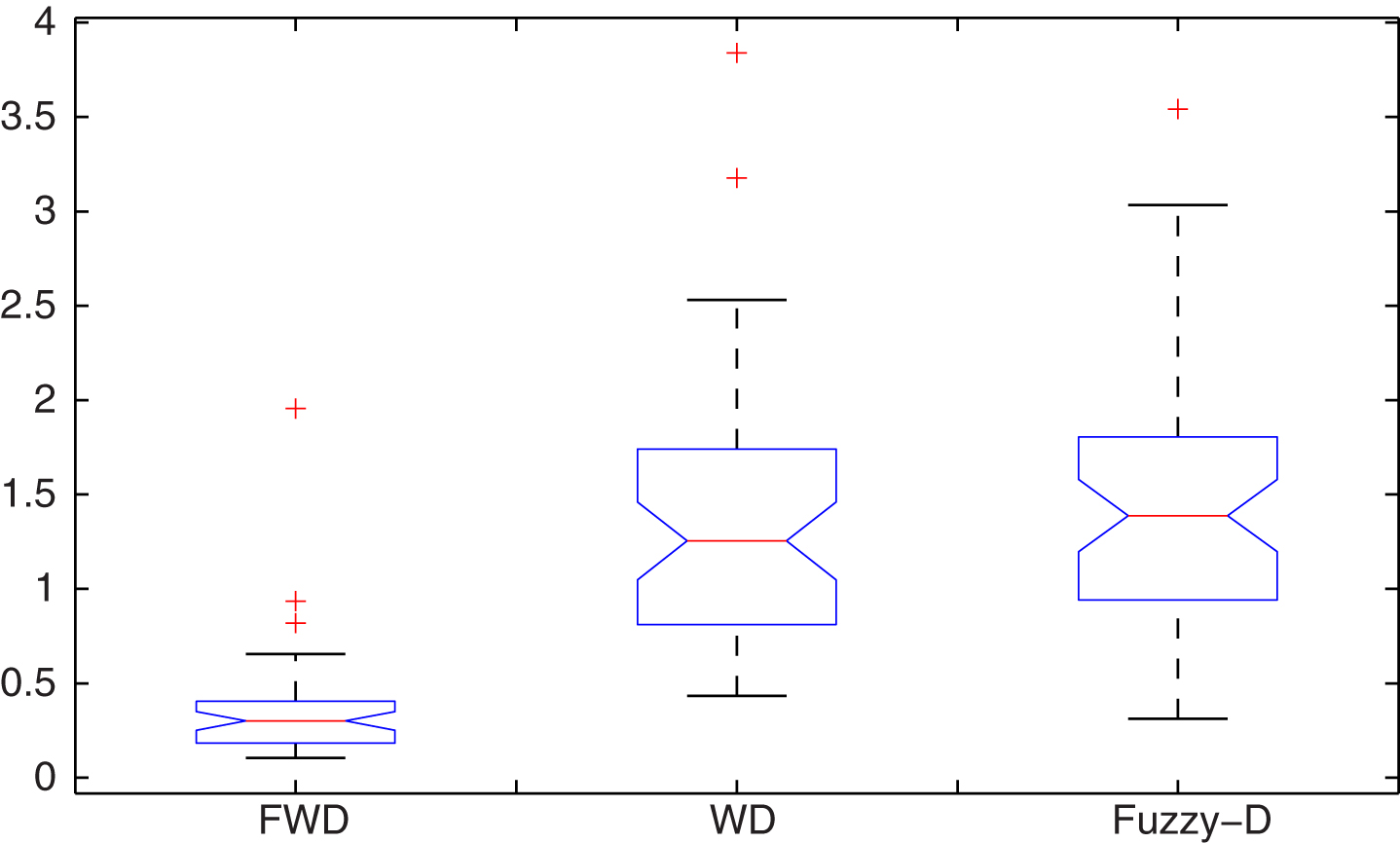
Boxplot of R for Doppler signal based on FWD, WD and Fuzzy-D methods.
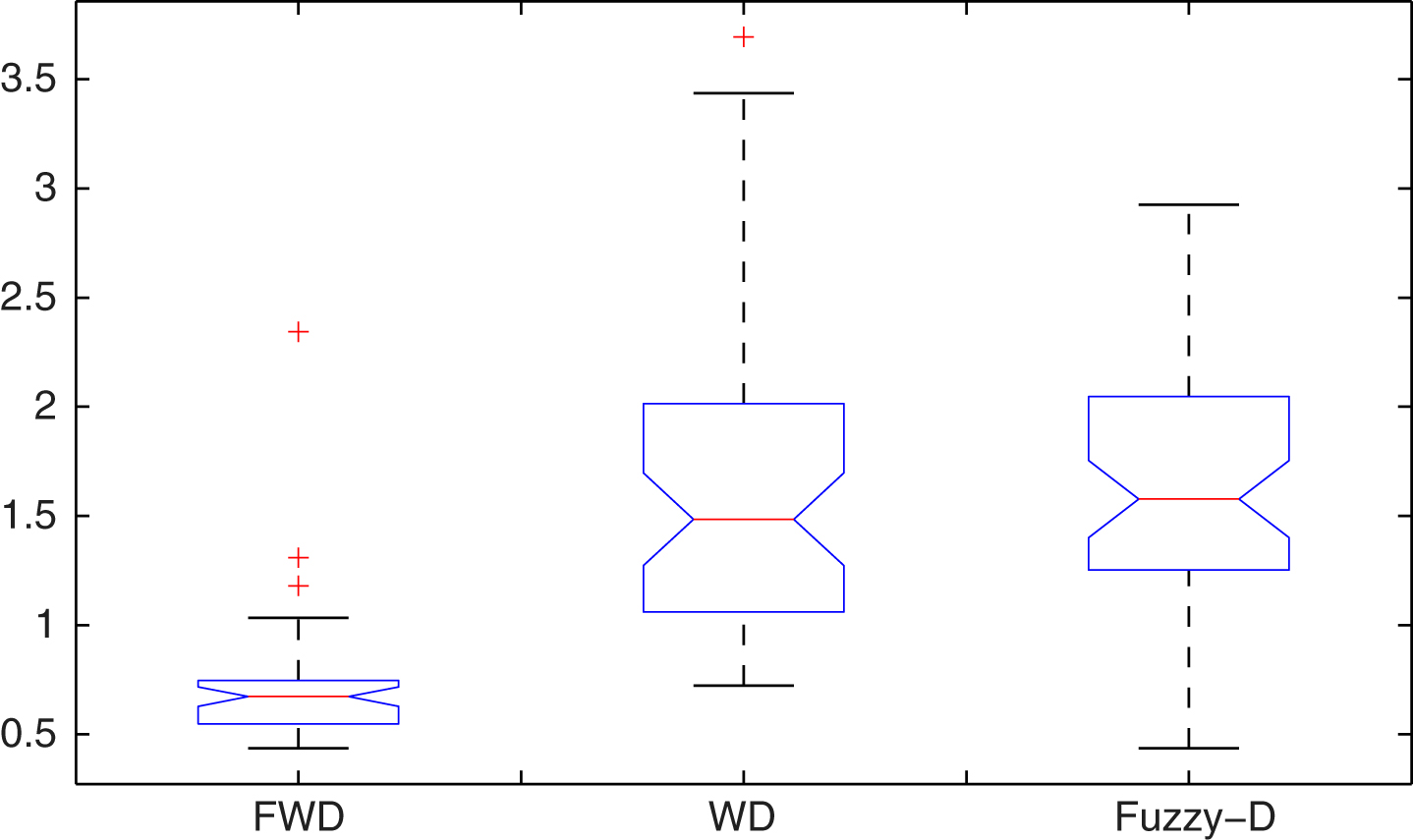
Boxplot of R for Quadchirp signal based on FWD, WD and Fuzzy-D methods.

Boxplot of R for Mishmash signal based on FWD, WD and Fuzzy-D methods.
To see more about the performance of the proposed method, we consider Doppler signal with different noise variances. In this case, the difference between the performance of the proposed method, WD and Fuzzy-D becomes more obvious when the noise variance is increased. The results are shown in Table 3.
Mean(R) for FWD, WD and Fuzzy-D methods with sample size 128 of Doppler signal
We also denoise an example which is mentioned in Section 3. This example is the noisy sinusoid i.e., Y i = sin(2i) + ɛ i for i = 1, …, 64. The performance of denoising methods, FWD, WD, Fuzzy-D and Fourier, over 50 iterations, are presented in Table 4.
Mean(R) for FWD, WD, Fuzzy-D and Fourier denoising methods for sin(2i) + ɛ i
As it is shown the performance of the proposed method is far better than WD, Fuzzy-D and Fourier denoising methods. Figure 12 shows that
Convergence of
We apply our method to different audio signals. The initial task is to improve the SNR by removing noise. We use the following definition of the SNR in db of a signal Y,
We consider two sets of data, a bird chirp signal and a musical signal. These audio signals are available examples in the MATLAB software with the name of chirp.mat and handel.mat, respectively. The bird chirp signal is used in [6].
To compare the performance of a method in speech signal processing, it is common to add some noises to the signal and then denoise it through different methods such as wavelet transform [1, 20]. Therefore, we add a centered Gaussian white noise to the audio signals and compute SNR and R for 100 different initial SNR levels. The mean SNR and R for both FWD and WD are presented in Tables 5 and 6 for bird chirp and musical signal, respectively. Our method gives better results than WD method.
Mean SNR and R for different SNR levels of the bird chirp signal
Mean SNR and R for different SNR levels of the bird chirp signal
Mean SNR and R for different SNR levels of the musical signal
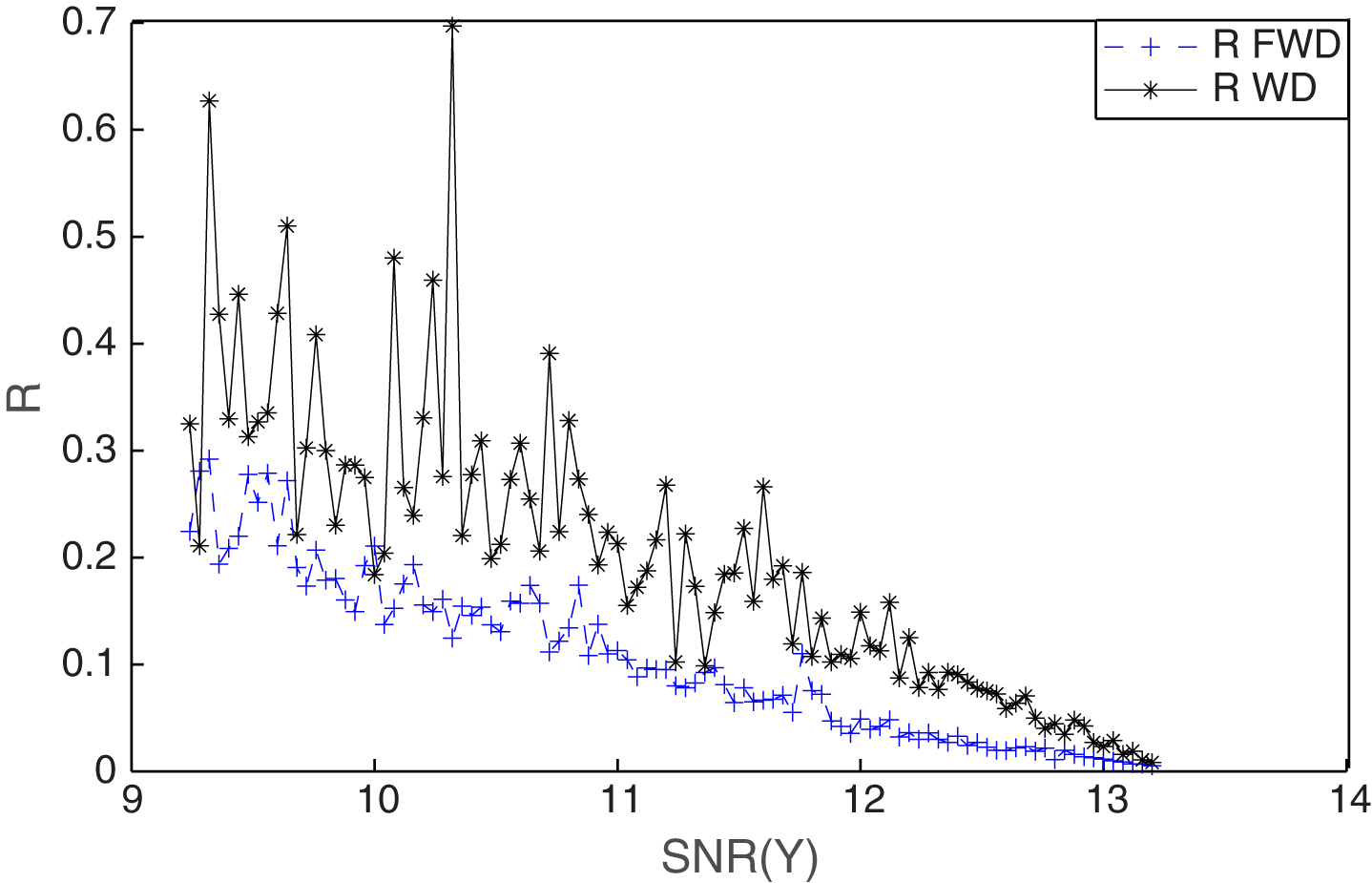
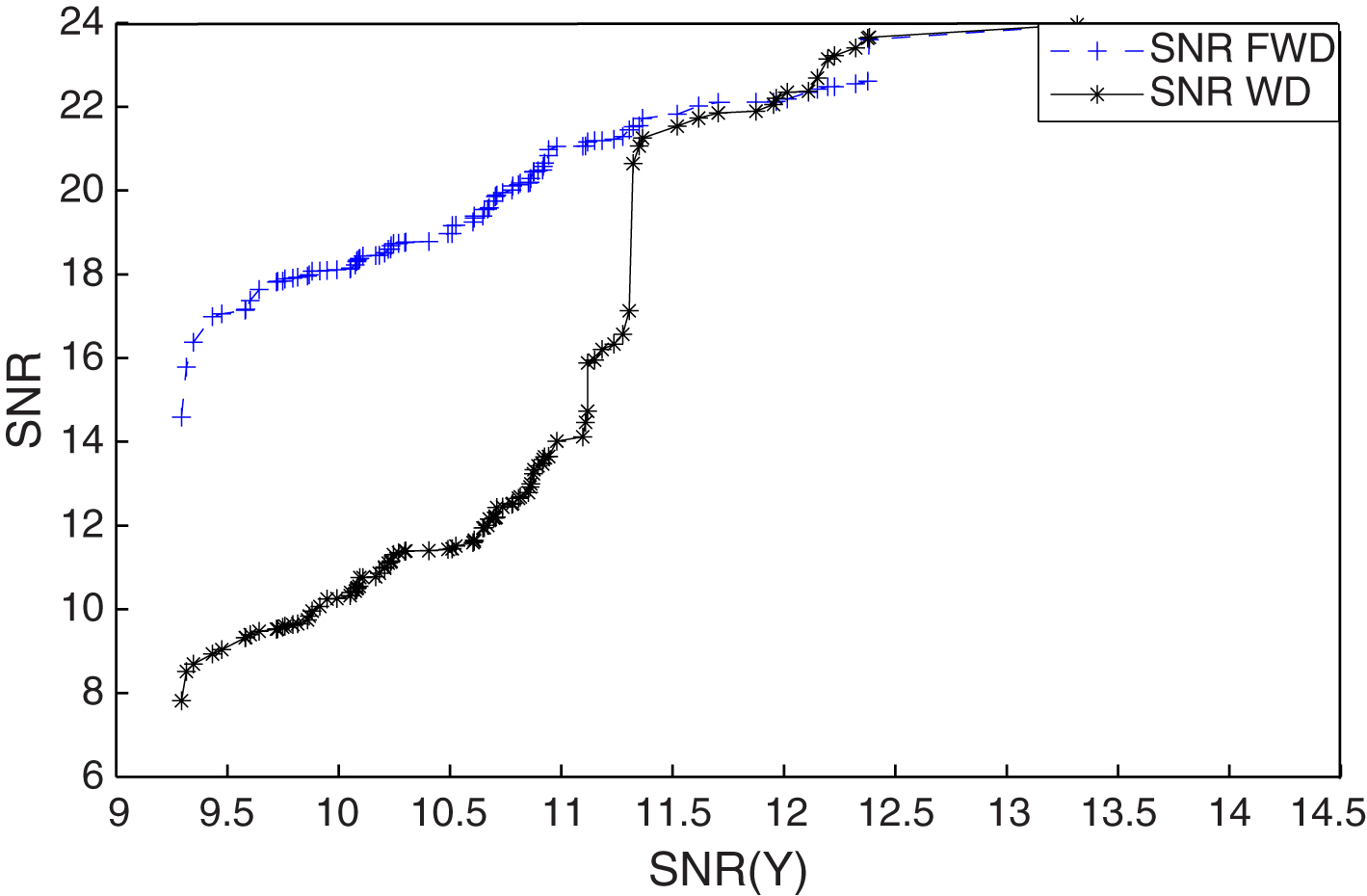
Figures 13 and 14 show the R and SNR of the denoised signals based on FWD and WD methods related to different SNR levels of the bird chirp signal, respectively. As we can see, the proposed method has better results.

R for FWD and WD methods for the bird chirp signal versus different SNR. FWD is denoted by ‘+’ and WD fit is denoted by ‘*’.

SNR for FWD and WD methods for the bird chirp signal versus different SNR. FWD is denoted by ‘+’ and WD fit is denoted by ‘*’.
Figures 15 and 16 show the R and SNR of the denoised signals based on FWD and WD methods related to different SNR levels of the musical signal, respectively.
R for FWD and WD methods for different SNR of the musical signal. FWD is denoted by ‘+’ and WD fit is denoted by ‘*’.
SNR for FWD and WD methods for different SNR levels of the musical signal. FWD is denoted by ‘+’ and WD fit is denoted by ‘*’.
As it is shown in Figs. 13, 14, 15 and 16, FWD method has better performance than WD method and FWD method is less sensitive to the change of the SNR of real data.
In this paper, we proposed a new fuzzy wavelet denoising method and compared it with ordinary wavelet denoising and fuzzy denoising methods. The new method is based on fuzzy wavelet transform and outperforms the other methods when it is applied to two different audio datasets as well as simulated data. For data with irregular pattern or small SNR, the difference of performance among three methods, FWD, WD and Fuzzy denoising, becomes more important. This fact shows the stability of the proposed method. For future work, we can work on non-equidistant data.
Acknowledgments
We would like to thank the editor and two anonymous referees for their valuable comments and suggestions.