
Abstract
Convex evidence theory is the only way to handle ordered and fuzzy evidence fusion, however, conventional convex evidence theory has some drawbacks that make the fusion results are unreasonable in some cases, and not efficient in the scenario of massive data. To overcome above issues, in this article we proposed a novel convex evidence theory based on Gaussian function, we modified Gaussian function and use it to combine mass function of ordered propositions, we designed the formula of the parameters of Gaussian function, and proposed a more accurate method to find the most likely true proposition. We also proved the effectiveness of the proposed method. Theoretical analysis and experimental results demonstrate that the proposed method has lower time complexity and higher accuracy than state-of-the-art method.
Introduction
Evidence theory is proposed by Dempster and Shafer [1, 2], so it is also called Dempster-Shafer theory, or D-S theory. It is an important approach for uncertainty and vagueness processing in the field of artificial intelligence, and has been widely used in many areas [3–5], especially in information fusion recently [6–10].
Fusion of ordered evidences is a challenging problem for evidence theory. The problem of ordered evidence is an important and widespread problem, for example, professors evaluate student by “Excellent, Good, Pass, Failure”, agricultural experts evaluate fertility of cultivated land by “high, upper middle, middle, lower middle, low”. These are all ordered evidences. Fusion results of ordered evidence must satisfy convex property.
To deal with the fusion of the ordered evidences, Liu et al. [11–13] proposed the concept of ordered proposition, and proposed a convex evidence theory model to fuse the mass function of ordered proposition, they constructed evidence combination function for ordered propositions, so far, this is the only uncertainty model for fusing ordered evidence, and it has been successfully used in many application areas [14]. However, there are some drawbacks which make the fusion results are not reasonable in some cases, and not efficient in the scenario of massive data.
To enhance the efficiency and accuracy of the fusion of ordered and fuzzy evidences, in this paper we proposed a novel convex evidence theory based on Gaussian function, a modified Gaussian function is designed to be the combination function, the calculation of fusion result needs lower computation cost, in addition, it can achieve more reasonable result than conventional method.
The remainder of this paper is organized as follows: Section 2 offers brief background knowledge about ordered proposition and the drawbacks of conventional convex evidence theory. The method we proposed is described in Section 3. Then Section 4 presents the experiments to verify the proposed method. Finally, the conclusions and recommendations for future work are summarized in Section 5.
Preliminaries
Brief knowledge about ordered proposition
In this section, we provide brief knowledge about ordered proposition and convex evidence theory.
∀i = 1, 2, …, n, all subject items of P
i
are S, predications are s
i
; ∀i = 1, 2, …, n, predications s
i
describes same characteristics or features of S; The degree of characteristics or features described by s
i
gradually increase or decrease.
For example, if we evaluate examination result of a student, then S = student, s i is {Excellent, Good, Pass, Failure}, so P1 is “student is excellent”, P2 is “student is good”, P3 is “student is pass”, P4 is “student is failure”. When people evaluate same characteristics of same object, the evaluation results are usually “gradually”.
When we evaluate same characteristics of same object, the evaluation results must have convex property, that is to say the uncertainty value of each proposition is unimodal, because we can not say “a student is both excellent and failure”. Figure 1 shows an example of function which has convex property.

An example of convex function.
The uncertainty value of proposition (just like mass function in D-S theory) is represented by mass function. Because predications s i are most item in proposition, so in the remaining of this paper, we represent proposition “P i = S is s i ” by “s i ” for short.
For 0≤ f (μ1, μ2) (s
i
) , ∀1 ≤ i ≤ n ; ∑1≤i≤nf (μ1, μ2) (s
i
)≤ 1 ; f (μ1, μ2) is convex function, i.e. for any i, j, k if i ≤ j ≤ k, then
Property(i) is derived from definition of mass function in evidence theory, and property(ii) is derived from the convex property. In reality, the combination function is to combine the two mass function into one mass function.
Liu et al. [11–13] proposed convex evidence theory to fuse ordered propositions, however, there are some drawbacks in traditional convex evidence theory model: (1) It will bring errors because of its rounding operation in the calculation of the order number of the proposition which are most likely to be true. (2) Combination function is complex to calculate and need much computation cost. (3) The fusion results are incorrect in some cases, for example, there are two groups of propositions for fusion (or combination), if the uncertainty values (i.e. mass function) of the propositions are as follows:
Novel convex evidence theory based on gaussian function
In this section, we proposed the new convex evidence theory. We first present the new combination function.
Suppose s1, s2, …, s
n
are a group of ordered proposition, the two mass functions for combination are μ1 and μ2, then the combination function f (μ1, μ2) (s
i
) is as follows:
We can see Equation (1) is a modified Gaussian function, so we call it Gaussian convex evidence theory. g is the extreme point of the mass function, g is a real number, the proposition whose order number is nearest from g is most likely to be true among all the propositions. For example, if g = 3, Fig. 2 shows the shape of the combination function, the red point represent the uncertainty value of each proposition, 3rd proposition has the maximum uncertainty value, so s3 is most probably to be true. If g = 3.7, the function is showed in Fig. 3, as we can see, 4 is nearest from 3, so s4 has the maximum uncertainty value and is most likely to be true. So it needs no rounding operation during calculation, and rounding errors can not be introduced.
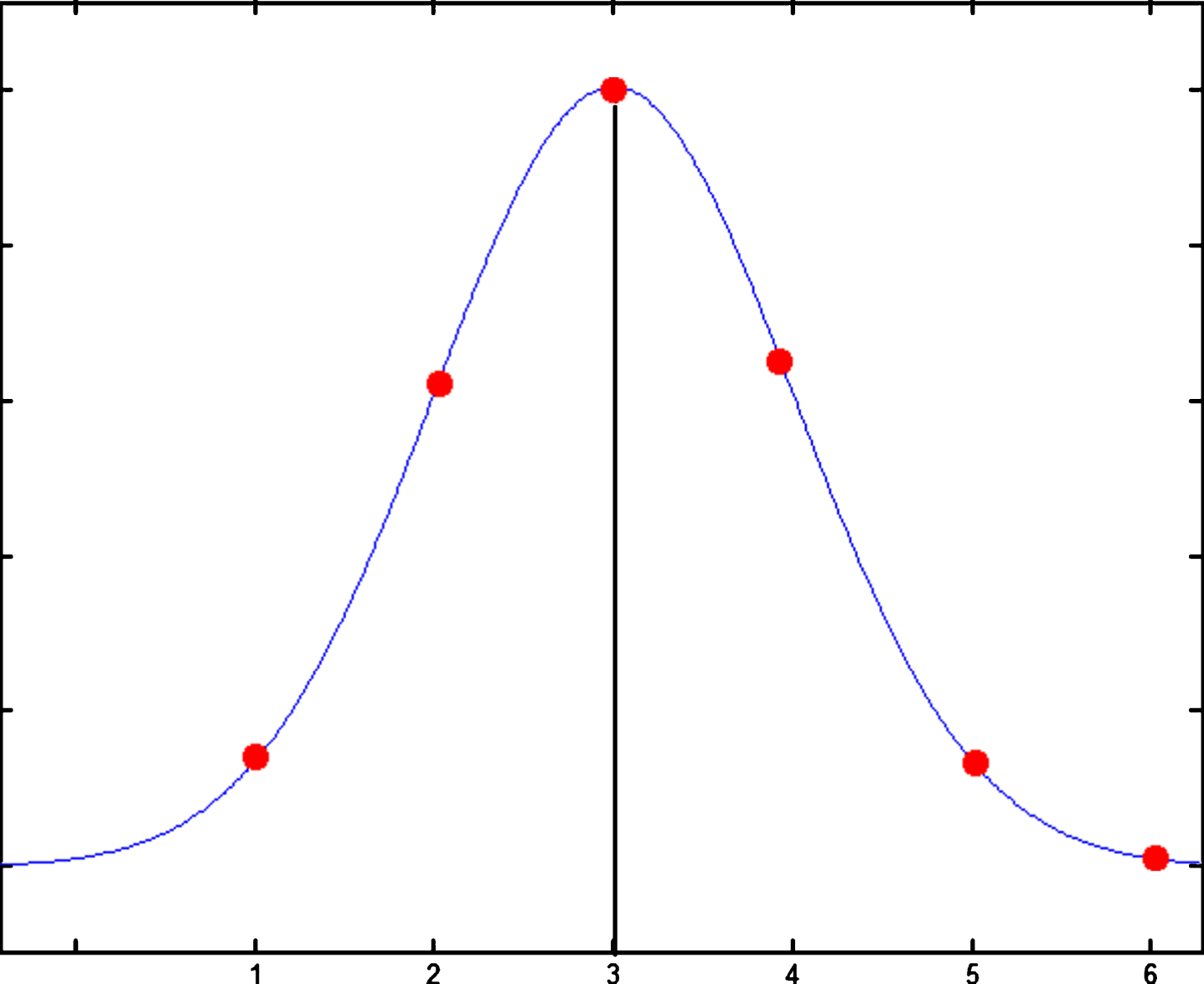
Combination function for g = 3.
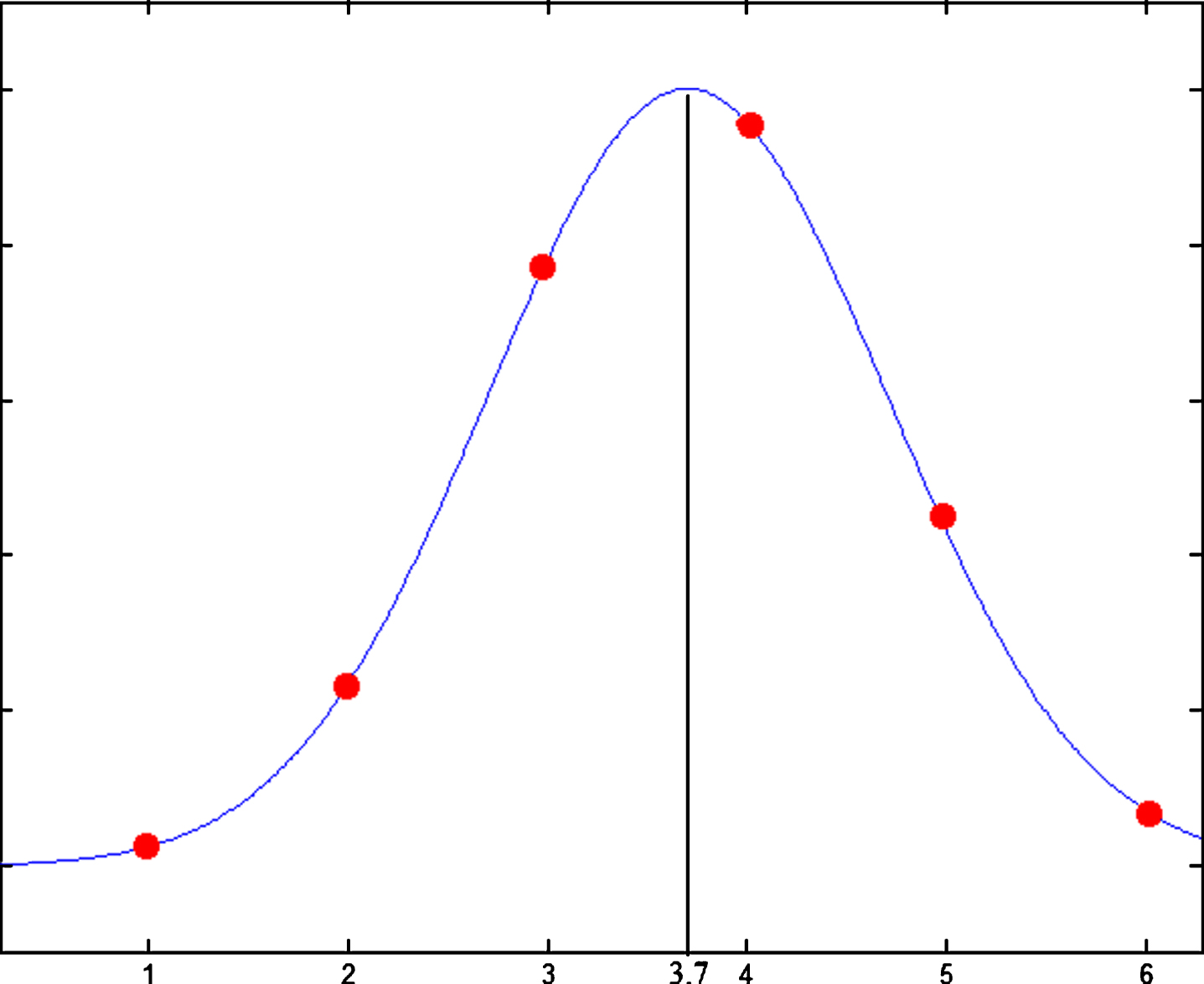
Combination function for g = 3.7.
Now we will prove the combination function f (μ1, μ2) (s i ) is legal mass function for ordered proposition.
(i) ➀ Because μ1(s i ) and μ2(s i ) are mass function, so ∀i, we have μ1 (s i ) ≥0 and μ2 (s i ) ≥0; moreover, e-c(i-g)2 ≥ 0, so from Equation (4), it can be seen that a ≥0. Therefore, from Equation (1), we can derive f (μ1, μ2) (s i ) = a · e-c(i-g)2 ≥ 0.
➁ Because μ1(s
i
) and μ2(s
i
) are mass function, so ∀ i, we have
From above derivation, we have proved f (μ1, μ2) (s i ) is mass function.
(ii) we prove f (μ1, μ2) (s i ) satisfies convex property.
➀ For any i ≤ j ≤ g,
Because i ≤ j ≤ g, thus j + i - 2g < 0, j - i > 0, c > 0;
So c (j + i - 2g) (j - i) <0, therefore:
i.e. f (μ1, μ2) (s i ) ≤ f (μ1, μ2) (s j ).
That means if i ≤ g, then f (μ1, μ2) (s i ) is monotonically increasing function.
➁ For any g ≤ i ≤ j, from ➀ of (ii), we have
Because g ≤ i ≤ j, then j + i - 2g > 0, j - 1 >0, c > 0;
So c (j + i - 2g) (j - 1) >0; therefore,
i.e. f (μ1, μ2) (s i ) ≥ f (μ1, μ2) (s j );
That means if i ≥ g, then f (μ1, μ2) (s i ) is monotonically decreasing function.
Synthesize (ii)-➀ and (ii)-➁, we can derive that f (μ1, μ2) (s i ) is convex function, and g is the extreme point.
Therefore, Synthesize (i) and (ii), we can derive that f (μ1, μ2) (s i ) is mass function for ordered proposition. ■
Let us consider the aforementioned cases in Section 2.2 which are difficult to handle by traditional convex evidence theory. Firstly, to combine (0.99, 0, 0, 0, 0) and (0, 0, 0, 0, 0.01), from Equation (2), we can compute that g = 1.04, so the combination result is (0.352071 0.140307 0.007567 0.000055 0.000000), that means s1 has the maximum uncertainty value, obviously this is a reasonable result. Secondly, to combine (0.25, 0.25, 0.25, 0.25) and (0.25, 0.25, 0.25, 0.25), from Equation (2), we can obtain g = 2.5, but from Equation (3), we can get c = 0, from Equation (4), we can get a = 0.25, so the combination result is still (0.25, 0.25, 0.25, 0.25), that is reasonable.
Now the computational cost is considered for the combination, when the combination result is calculated, first the g, a and c are computed using Equations (2–4), that needs O(n) time complexity, then Equation (1) is adopted to calculate uncertainty value for each proposition, there are n propositions, so the total time complexity is O(n). From [12] it can be seen that the time complexity of traditional convex evidence theory is O(n2), therefore, the proposed method has lower computational cost.
Comparison with conventional method
In this section, we select 15 typical data sets, each data set has two groups of propositions to combination, they are listed in column 2 of Table 1, and we listed the combination results generated by conventional convex evidence theory and the proposed Gaussian convex evidence theory in column 3 and column 4 in Table 1. From Table 1 we can see that, for the 1st and 2nd cases, the propositions for fusion are both indeterminate, so the fusion results of Gaussian convex evidence theory are obviously correct while the conventional convex evidence theory is incorrect. For the 3rd and 4th cases, the fusion results of traditional convex evidence theory is unreasonable that is analyzed in Section 2.2, and obviously the fusion results of proposed Gaussian convex evidence theory are better than conventional convex evidence. And from 4th to 15th cases, the two methods are consistent. Therefore, the proposed method generates more reasonable results than state-of-the-art method.
Experimental results of proposed and existing method
Experimental results of proposed and existing method
We take the “ocean oil spill risk assessment” as the application example of the proposed method. The ocean oil spill accident is divided into 5 levels based on the scale of the accident: {minor accident, medium accident, minor serious accident, serious accident, major accident}. In this section we established an assessment model that estimated the risk based on the weather conditions. The weather conditions include: wind speed, wave height, visibility, seawater temperature [15]. And the mass functions are generated based on typical sample method [16]. The typical values of the weather conditions for 5 levels accidents are listed in Table 2.
Typical sample data for ocean oil spill accident
Typical sample data for ocean oil spill accident
The truth value of an evidence with the value of C for s
i
is:
So for wind speed = 5.6 m/s, wave height = 0.6 m, visibility = 3 m, seawater temperature = 4°C and α= 10, the mass functions are listed inTable 3.
Mass functions for ocean oil spill accident with α= 10
From Table 3, we obtained the 4 mass functions for fusion:
Therefore, the final fusion result by the proposed method is μfusion-result = (0.03, 0.6, 0.3, 0.07, 0), that means “medium accident” are most probably to happen.
In this paper we proposed a novel convex evidence theory model for fusion of ordered proposition, we proposed a combination function based on Gaussian function, and proposed new formula to calculate the parameters a, c, g of Gaussian function, we also prove that the proposed combination function is effective. The proposed method has low time complexity and higher accuracy than existing method. Making deep research on the property of convex, find more mathematical convex functions for combining ordered proposition to make the fusion results more reasonable and accurate are the topics we will concentrate on in future, and we will also try to apply the proposed method in more data fusion scenarios such as sensor data fusion [17].
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant Nos. 61502198), China Postdoctoral Science Foundation (Grant Nos. 2013M541303), the Opening Fund of State Key Laboratory of Applied Optics, Science and Technology Development Program of Jilin Province of China (Grant Nos. 20150520066JH).