
Abstract
This paper presents a novel indirect type-2 fuzzy sliding mode (T2FSM) control approach for fractional order chaotic systems. In this paper both switching control term and the equivalent control term are estimated in comparison with the current fuzzy sliding mode control system designs, where the control law of sliding mode is directly replaced by a fuzzy term controller. The consequent adaptive T2FSM parameters are adjusted online to synchronize two fractional order systems with uncertainty. As a result, the chattering phenomenon is weakened and the error is also lessened, while the controller robustness against system uncertainties and unknown disturbances is improved. The designed approach has achieved the following advantages. Firstly, by applying the Lyapunov design method and interval T2FSM method to achieve the control law. This proposed approach makes a good performance for the overall system. Another advantage of the proposed design is to relax the requirement for the limit of approximation error and an estimation method is also employed to observe the bound of it real time. Simulation results confirm the perfect method in the existence of a disturbance with uncertainty.
Keywords
Introduction
Though fractional order calculation is a much older classical mathematical theme having the same 300-year history as integer calculus, it has found application in many domains of physics [11] and engineering [21] only in recent decades.
At the same time, chaos synchronization of fractional order systems have made great contributions [1]. Some papers discuss how to synchronize the general fractionalorder chaotic systems [31], while others study special issues of that [2].
Chaos synchronization describes the closeness of the trajectories between oscillators formed by two coupled chaotic systems in different periods. Since the new creation work of Pecora and Carroll [23], chaos synchronization is attractive in many scopes such aseconomical system, chemical systems, biological reactions, secure communication and information technology [10]. Nowadays chaos synchronization, a very important theme in the nonlinear science has been researched in a lot of papers, including the algorithms of fuzzy control [28],back-stepping control [16], adaptive theory [12], linear feedback control [3, 35], and fuzzy sliding mode control [15, 32].
In some paper, fuzzy controllers as a model-free controller are applied to implement the synchronization between two chaotic systems [30]. It has been proven that relying on universal approximation theorem, any nonlinear systems could be approximated to any desired accurateness by Fuzzy-neural network (FNN) [37]. The adaptive FNN approaches are categorized into two kinds: direct adaptive algorithm and the indirect one [37]. In the former control, a direct adaptive FNN system is applied as controller by the adaptive controller. While in the latter one, indirect adaptive FNN control, the fuzzy characterization is applied by adaptive controller to simulate the system. Rules of IF–THEN characterize a type-2 FLS with the unchanged type-2 antecedent or consequent sets. Therefore, it can be applied for type-2 FLS when the circumstances are not so certain that exact membership grades can be settled. For instance, training data are corrupted by noise [13]. The most frequently used T2FLS are interval T2FLS (IT2FLS) for their reduced computational cost [20]. Though the T1FLS plays the most important role in applying fuzzy set theory extensively, the T2FLS have been employed in some control applications such as mobile robot navigation and nonlinear control [5], decision-making [34], chaotic control [14], robotic control [36] and sliding mode control (SMC) design [6]. Alternatively, many discussions of papers have been proposed on enhancing the stability of fuzzy controllers. As is generally acknowledged, a robust means is provided by SMC to control an uncertain nonlinear dynamic system [13]. A sliding motion could be generally classified into two stages: a reaching stage and a sliding stage. The SMC system may show sensitivity to external disturbances and parameter changes, on the reaching stage; however, the system shows robustness to disturbance, in the sliding mode [22]. Hence, different approaches have been proposed such as minimizing or even deleting the reaching stage [9]. During the reaching phase, disturbances or parameter variations may degrade tracking error. It is a straight forward method for the reduction of synchronization time and steady error and the increasement of the control discontinuity [4]. However, an undesirable result, chattering, may be caused in some dynamic systems. Several methods have been set forth in the paper to eliminate the chattering phenomenon [7, 27]. However, these methods are acknowledged to degrade the robustness.
The contribution made by this paper is that by incorporating the advantages of sliding mode, adaptive fuzzy hybrid control approach is proposed to address the synchronization control without chattering phenomenon in the face of structure and unstructured uncertainties. In order to enhance robustness during reaching time, first a novel moving sliding surface (MSS) is introduced, where the sliding surface is adjusted by adaptive interval type-2 FNN. Secondly, indirect adaptive FNN control law is obtained while both the switching-type control term and equivalent control term are approximated by fuzzy systems. Tuning on-line can be realized relying on the method of Lyapunov synthesis for free parameters of the adaptive FNN. Simulations both present the effectiveness of the proposed control approach and stability analysis.
Preliminaries for fractional calculus
Definitions of fractional-order derivative
Fractional order calculus is a generalization and unification of the classical integer order calculus [8]. There are many different definitions related to the fractional order derivative, such as Riemann-Liouville (RL) definition and Caputo definition [24]. The definitions of Riemann-Liouville (RL) and Grunwald-Letnikov (GL) are most widely applied to define the general fractional calculus [25, 29].
Fractional differential functions are generally solved in the PC (Predictor, Corrector) approach put forward by Diethelm et al. [36]. The differential equations as follows:
let:
Then Function (6) shows its discretization in the following function:
Then, for Function (9), the error can be expressed as:
Therefore, the algorithm mentioned above can be applied to solve a fractional order system numerically.
Figure 1 shows the IT2FS architecture which is different from type-1 fuzzy system which could be achieved by the reasoning results of IT2FS. Thus, the output of inference engine is shown to be the IT2FS.

Structure of IT2FS.
Let the IT2FS have an output (y ⊂ Y) and I inputs, then the fuzzy rules number sums to N. The form of the nth fuzzy rule is denoted as follows:
Here Calculating Calculating the firing interval of the Nth rule F
n
(x):
It can be noted that, instead of the product, the minimum can be applied in Equation (10). Operating the type-reduction to integrate the correlating rule results and F
n
(x). The center-of-sets type-reduction approach is applied in this study [18]:
With
y
l
and y
r
could be calculated by Karnik-Mendel methods as follows [19]: Sorting Initializing g
n
by setting Calculating the switch point k (1 ≤ y ≤ N - 1) which makes For some n≤k, taking Testing if y′ ≠ y. If no, go to step (f). If yes, pause and set L = k. Given y = y′, then go to (c). y
l
and y
r
also apply EKM algorithm [33] with less computing time consumption. Calculating the defuzzified output as y = (y
l
+ y
r
)/2.
Suppose a class of fractional-order drive system is expressed as
The slave system would be shown as follows:
In the above systems, p (x, t) and q (y, t) are uncertainty with bound expressing dynamics of system, u (t) is control term, d (t) is external bounded disturbance and x1, x2, y1 and y2 are the state variables. The control aims at synchronizing both response and driven systems though setting up the controller which acquires driven system feedback in order to adjust performance of the slave system.
The error system of synchronization is described as
After that, the following error dynamic equation could be obtained:
This paper aims at the achieving the asymptotic stability of system in the sense that
Then, in the synchronization error terms, sliding surface is denoted as:
Through sliding mode condition η ≥ 0,
Nevertheless, in the practical applications, the equivalent controller (20) would fail when both the external disturbance and the response system are unknown. To identify and control the unknown response system (17) and the unknown external disturbances, here, fuzzy systems are applied to approximate p, q and the switching control term η sw sgn (s).
Therefore the resulting controller could be achieved.
In the adaptation process, let
The parameters, here, in ξ (x) and φ (s) are thought to be estimated, when adaptive law can freely design the parameters
Define the minimum of estimated error
Then, we get
Now study the Lyapunov function candidate
The derivative of V is
Substitute (26)–(28) into (32), then we get
It can be predicted from the general approximation theorem that the term sω, if not equal to zero, should be very small in the system [17]. Then we set
It has completed proof that (34) determines whether adaptive fuzzy sliding mode dynamics exists. Ultimately the error system would be stable at equilibrium point, that is, the synchronization could be achieved between the drive system and controlled response system.
In this part, the performance of the above proposed scheme will be studied through three typical fractional-order chaotic systems. As mentioned in Section 2.2, one has implemented the improved algorithm for numerical simulation in MATLAB, in which the step-size is fixed as h = 0.005.
Suppose the Duffing-Holmes fractional-order case expressed by
Original conditions of response system and drive system are respectively designed as y1 (0) =0.1, y2 (0) = -0.2 and x1 (0) =0.2, x2 (0) =0.2. Figure 1 shows state portrait of the chaotic dynamics (25) as q = 0.98 in system. Parameters a and b are separately determined as 0.25 and 0.3.
The uncertainty and disturbance can perturb the response system, which is given by
In the function above Δg (t, Y) and d(t) are selected as 0.1 sin (t)
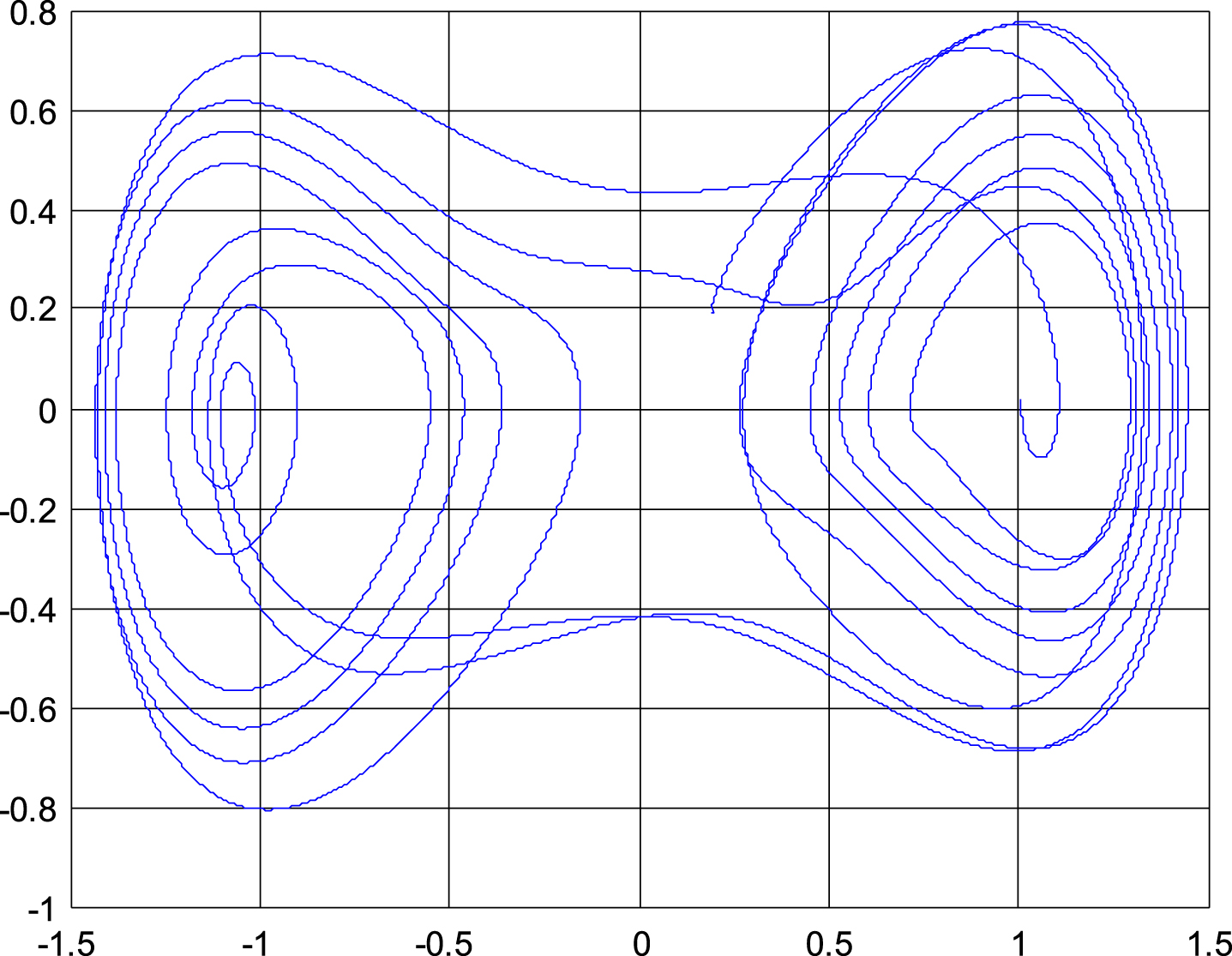
State portrait of Duffing-Holmes system.
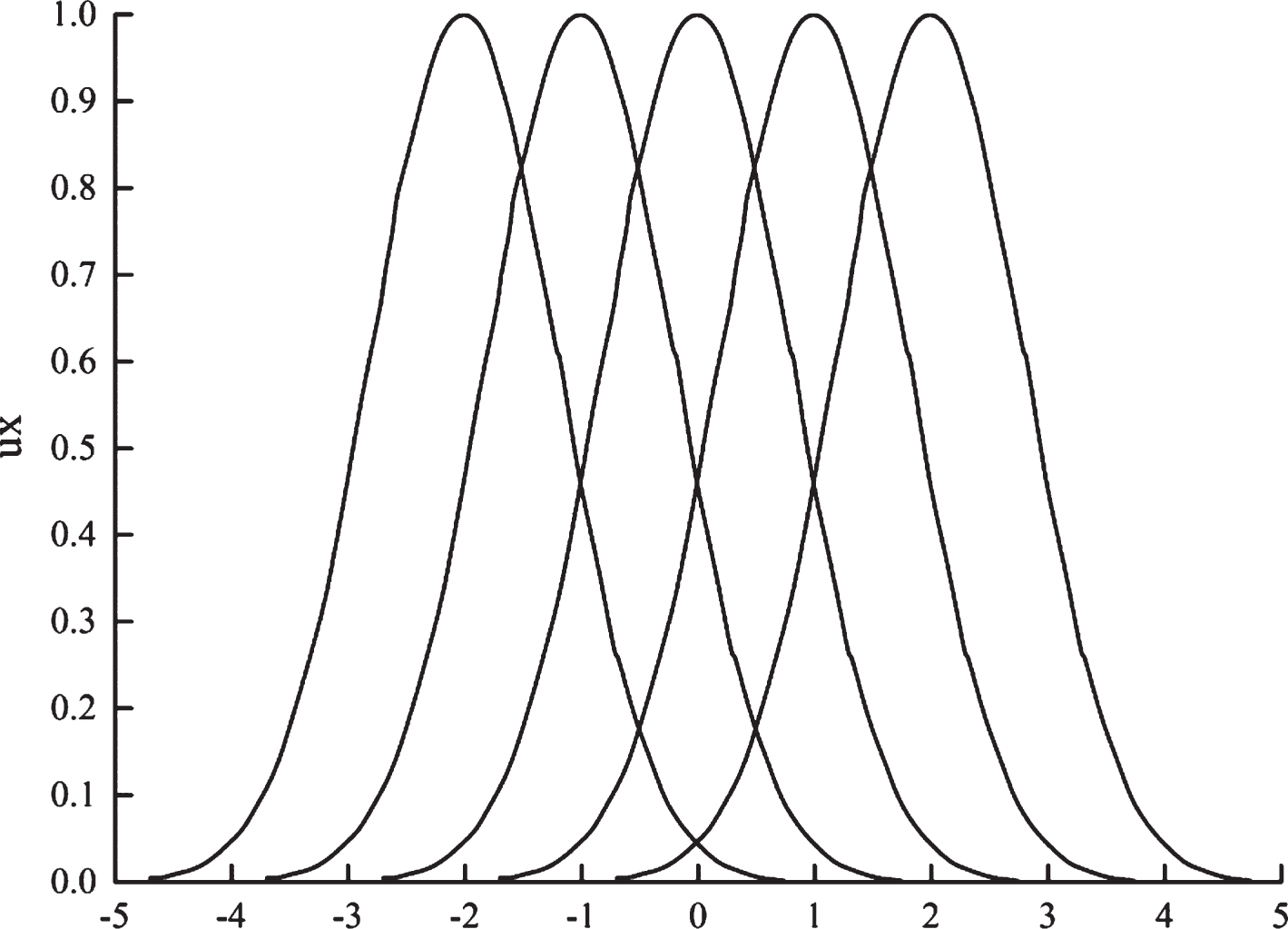
The membership function for x i and y i , i = 1, 2.
We activate the control effort at 3s so as to be robust in the proposed AFSMC. The synchronization performance and stage portrait of drive systems is demonstrated in Fig. 4 to illustrate the trajectories of the states x1 and y1, while the ones of the response system is displayed in Fig. 5 to reveal that of states x2 and y2. It can be seen that when the control effort is activated, the synchronization of response and drive is approached quickly. Figure 6 demonstrates the sliding surface trajectory S(t).
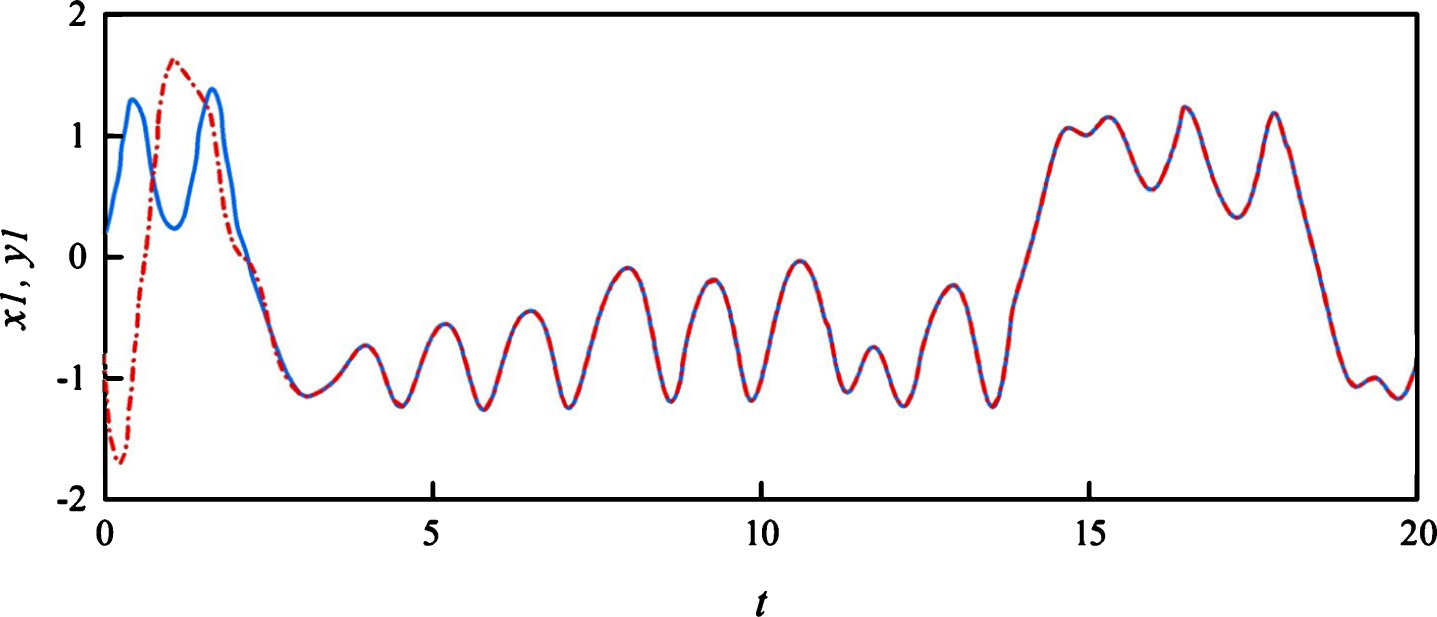
The states x1 and y1 trajectories.
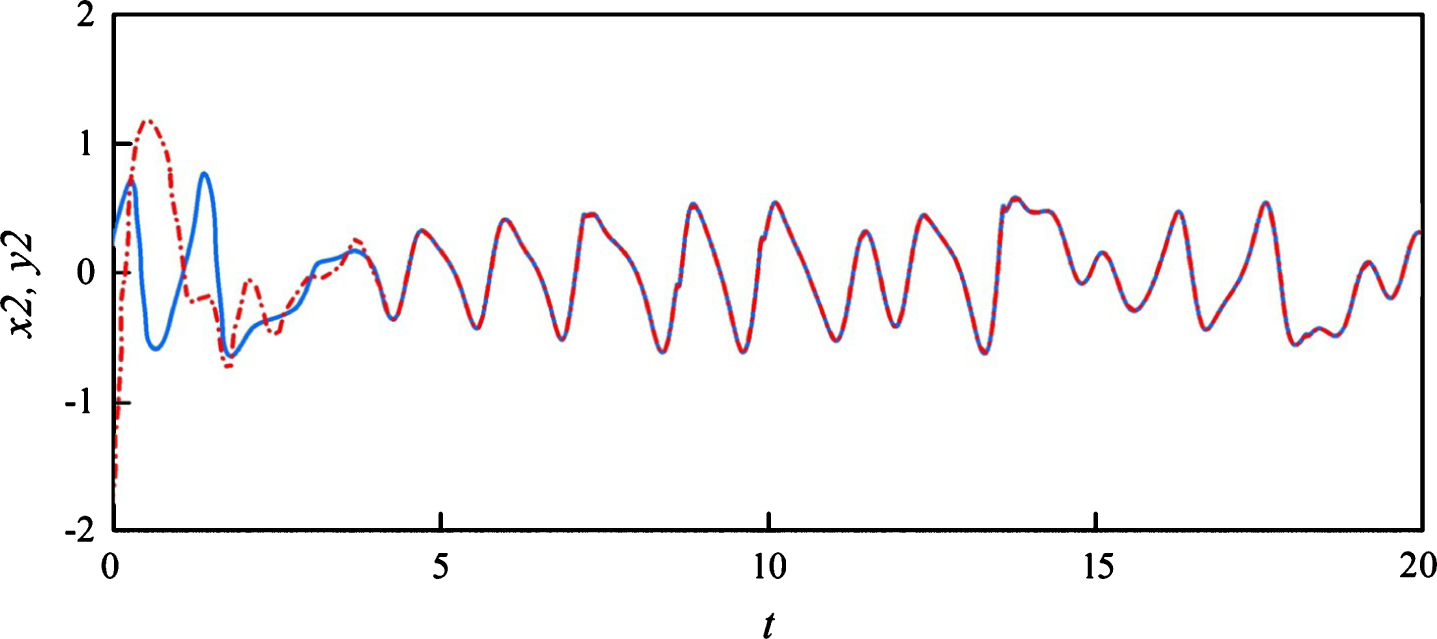
The states x2 and y2 trajectories.
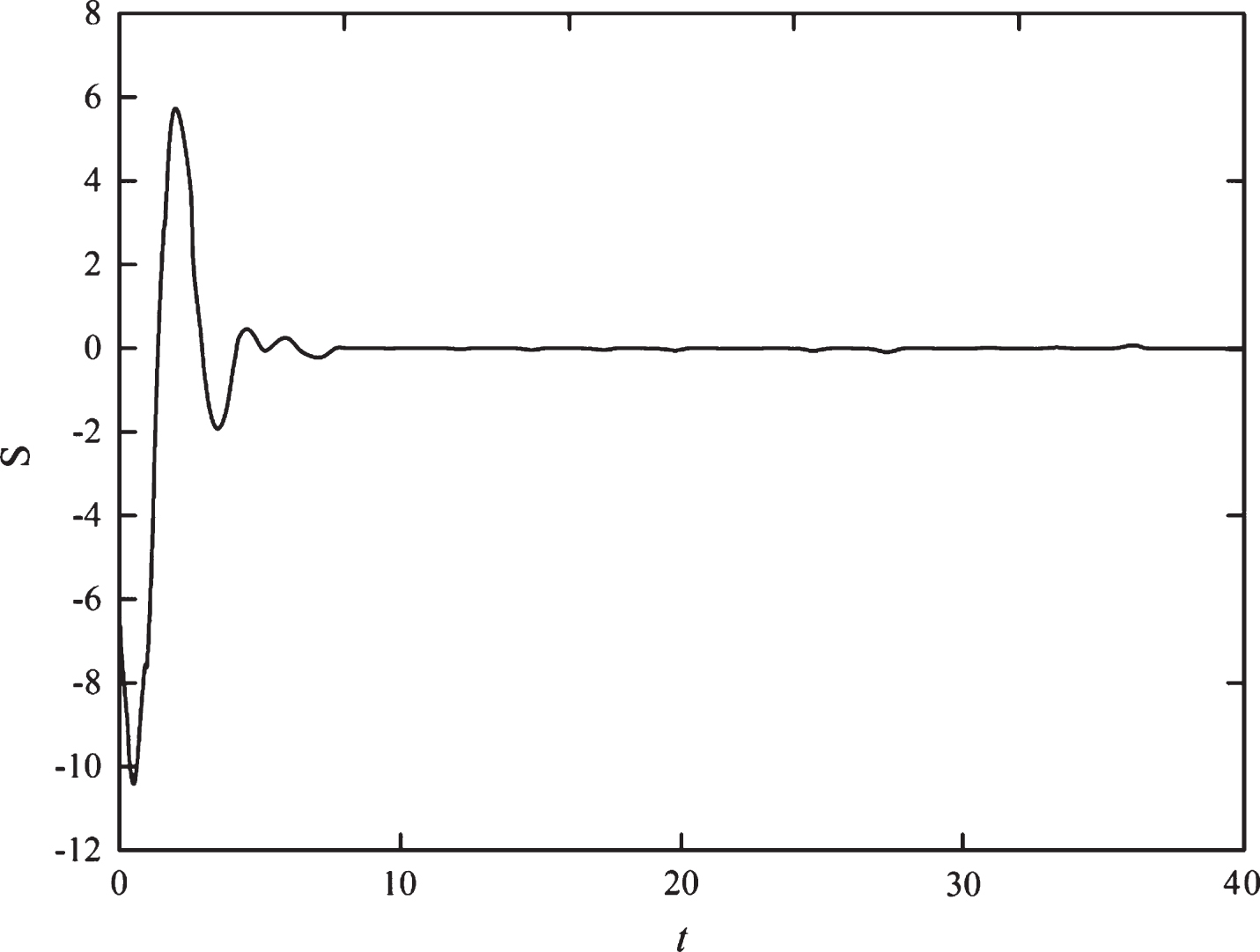
Trajectory of the sliding surface S (t).
An IT2FNN control system’s application has been successfully illustrated to keep fractional-order chaotic system in internal noise and linguistic uncertainties in the paper. First, fractional-order chaotic system’s principles are adopted. After that, the detail information has been specified about the stability analyses and the theory foundation of the IT2FNN control method raised in the paper. During the design process, parameters derived from controller could be trained by using the Lyapunov stability theorem, where fuzzy systems can estimate both the switching-type and equivalent control term using the control law of sliding mode. It is the advantage of the algorithm to adaptively generate fuzzy rules even when no prior knowledge is known about the system. The IT2FNN control system has robustness on external disturbances and parameter variations. The steady error is alleviated while the phenomenon of chattering is attenuated in the sliding mode controller. Last, experimentation and simulation have been implemented to verify whether the control schemes proposed in the paper effectively by fractional order systems synchronization. IT2FNN proposed in this paper is observed clearly to show favorable result.
Footnotes
Acknowledgements
The authors would like to acknowledge the partial supports provided by Shandong Province Crucial R&D Plan Project, China (NO: 2015GGX105008) and Shandong Provincial Science and Technology Development Plan Project, China (NO: 2014GGX105001). The gratitude should also be given to both the editors and anonymous commentators who pay attention on thorough reading, fruitful comments as well as constructive advices for the improvement of this manuscript.