
Abstract
This paper presents an interval type-2 Takagi Sugeno (TS) fuzzy model of Angle of Attack sensor of the aircraft. The angle of attack signal is used as a gain scheduling variable in flight control computer for governing the flight control laws, hence any failure or malfunction of this sensor can cause catastrophic damage of the aircraft. In this paper angle of attack signal is estimated indirectly by means of interval type-2 TS fuzzy model with the data obtained from aircraft speed, vertical acceleration and pitch angle sensors. The methodology shows its benefits for formulating a data driven standby model of actual angle of attack sensor. The presence of uncertainty in data or measurements can be addressed by type-2 fuzzy logic theory. The concept is demonstrated by using the recorded flight data of VFW-614 ATTAS aircraft operating in quasi-steady stall flight maneuver without any reference to physics of stall hysteresis. The model parameters are obtained using Gustafson and Kessel (G-K) clustering and weighted least square method. The comparative study with other modeling methods and fivefold cross validation test between model estimated data and actual angle of attack sensor data shows well suited modeling capability of proposed interval type-2 TS fuzzy system.
Keywords
Introduction
The Angle of Attack parameter is an essential input for safe and secure operation of modern aircraft for its full flight envelop with wide range of varying flight conditions. This parameter is generally measured by moving vane type angle of attack sensor, which gives the angle between resultant airflow in the plane of symmetry with the longitudinal axis of the aircraft [3]. The sensing vanes can freely move in response to the air stream as aircraft maneuvers and corresponding deflections are sensed via potentiometer or other angle-measuring transducers. The angle of attack parameter act as gain scheduling variable to reconfigure and govern the control laws embedded in flight control computer [3, 9]. Apart from this, the deflection law of few additional control surfaces such as canard and wing leading edge slats of the aircraft are directly regulated by this parameter [6].
The moving vanes of angle of attack sensor are installed in nose cone area of front fuselage. During accelerated maneuvers the angle measured by deflection of the sensor vanes are getting influenced by separation of airflow, aerodynamic loads and pitch axis acceleration [4, 5]. The fighter aircraft having cobra maneuvering capability can operate upto 90 degree of angle of attack, this wide range of operating conditions under aerodynamic/propulsive and gravitational loads can lead to damage/deformation of axle of sensor vanes [22]. The nonappearance or sporadic input data of angle of attack parameter to the flight control computer causes unreliable working of flight control system and as a result catastrophic damage of the aircraft [9]. Considering this prominence, the serviceability needs of angle of attack sensor becomes paramount importance as a safety point of view. To overcome from this safety critical situation, the provision of data driven standby system (model) can be made for continuous availability of optimally estimated value of angle of attack parameter (as per present flight configuration) to the flight control computer for instant recovery of the aircraft.
Various Neural Network (NN) and soft computing based techniques exist to estimate the angle of attack parameter from the data derived through other sources without taking the data from actual angle of attack sensor [1, 10].
The fuzzy logic theory proposed by Zadeh is one of the best approaches for system identification and modeling of such complex and highly nonlinear system. In this theory, Takagi Sugeno (TS) fuzzy model can represent the nonlinear systems in the form of various sets of fuzzy IF-THEN rules with rule output as the function of input parameters [12, 29], thus it simplifies the complete nonlinear dynamics of the system. In general, type-1 TS fuzzy logic system is applied for modeling in various application areas [7, 30], but in case of presence of uncertainty in the measurement or in the data, type-2 TS fuzzy model proves better alternative as compared to type-1 TS [13–16, 31]. The uncertainties associated with modeling of angle of attack sensor may be due to separated airflow created during post stall maneuvering flight conditions [4, 27] or because of sensor data that are used to tune the parameters of TS model are uncertain and noisy. Due to crisp nature of membership function of type-1 fuzzy system, it is unable to handle these uncertainties where as type-2 fuzzy system can model such uncertainties in better ways because its membership functions are fuzzy in nature. The membership function of type-2 fuzzy sets are three dimensional where as membership function of type-1 fuzzy sets are two dimensional, hence type-2 fuzzy sets provide an additional degree of freedom to model the uncertainties. The application of type-2 fuzzy logic system is beneficial in the cases if data generating system is time varying but mathematics of time variability is unknown or measurement noise is non-stationary with unknown mathematical description [15].
This paper presents the design method for modeling the Angle of Attack (AOA) sensor of the aircraft using interval type-2 TS (IT2-TS) fuzzy logic system. The angle of attack parameter is estimated indirectly with the data obtained from aircraft speed sensor, vertical acceleration sensor and pitch angle sensor. The model parameters are obtained from the given set of input–output training data and validated on separate set of test data [26].
This method can be used in realistic architecture even during uncertain and noisy flight environment (post stall maneuvering) to provide the model based standby system in case of failure or malfunction of actual angle of attack sensor of the aircraft.
The paper is arranged as: Section 2 introduces the angle of attack model formulation based on its dynamic equation. Section 3 describes about the motivation for implementation of interval type-2 TS (IT2-TS) fuzzy system for angle of attack sensor modeling with brief overview of IT2-TS fuzzy methodology. Section 4 highlights the architecture of IT2-TS fuzzy system for sensor modeling. Section 5 provides the insight about the implementation process. Section 6 discusses the results obtained and comparison with other modeling methods. Section 7 concludes the paper.
Angle of attack sensor model formulation
In general, the mathematical model of the system in state space form is given by [26].
The angle of attack parameter (α) which is one of the state variables of the aircraft can be modeled as nonlinear function of other state variables as [3, 27]:
As per the above assumption and neglecting the effect of lateral-directional motion variables, the air speed (V), Z axis vertical acceleration (a
z
) and pitch attitude angle (θ) are considered as potential input variables for sensor modeling. In consideration with this assumption the angle of attack sensor can be modeled as Equation (5).
The suitable formulation of model for Angle of Attack sensor can be characterized as phenomenological models and behavioral models. The phenomenological models are derived based on basic principles and physical law describing the process while behavioral models can be generated from input and output data without any specific relevance to internal behavior of the process [26].
In this paper, behavioral model based on IT2-TS fuzzy logic is proposed for redundancy management of angle of attack sensor as illustrated in Fig. 1. Proposed model can be trained from the training data set by taking V, a z , θ as inputs and α as output variables and in case of failure or malfunction of actual angle of attack sensor IT2-TS fuzzy model can provide the model based redundancy.
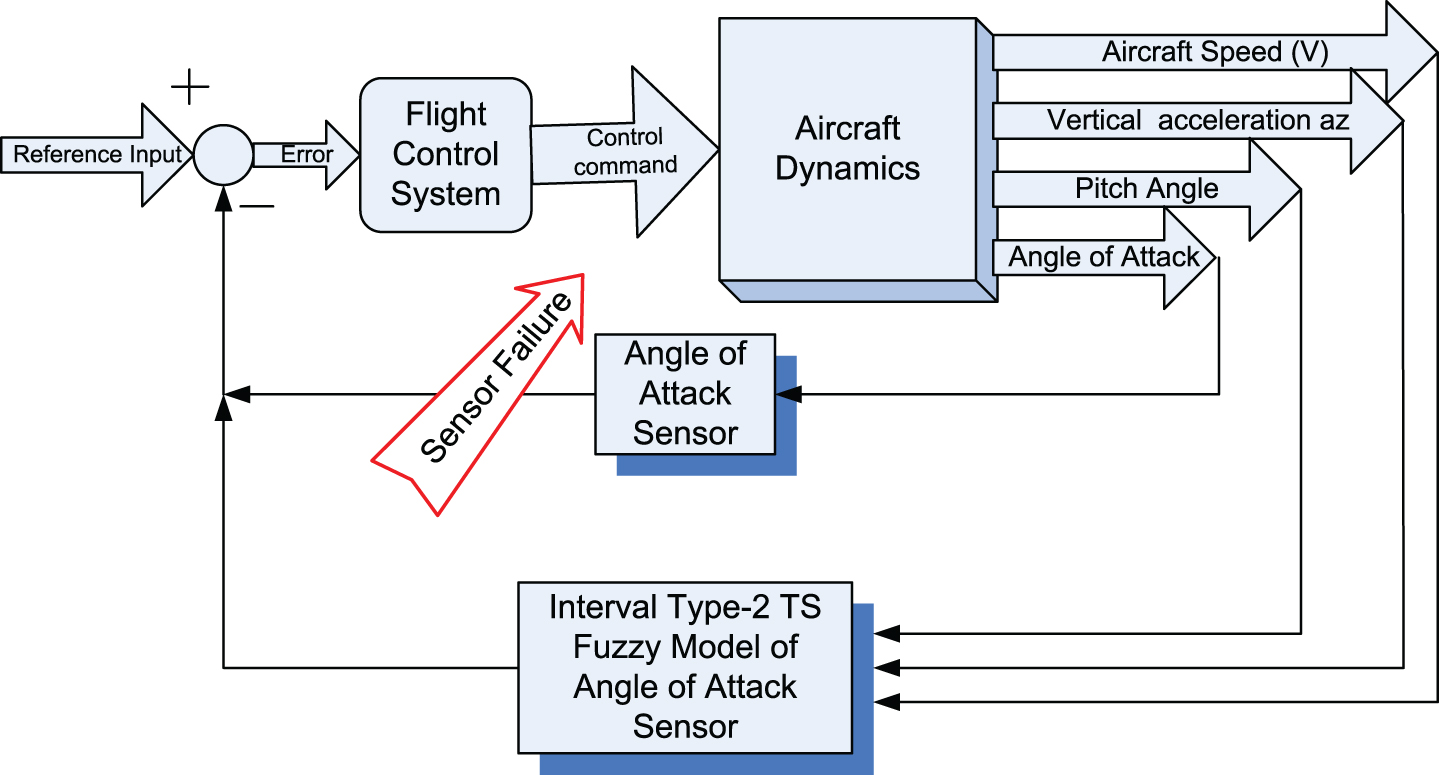
Angle of Attack sensor model.
Motivation for implementation
The modern fighters aircraft can operate over large flight envelop for wide range of varying flight conditions with high degree of maneuverability. These aircrafts are capable of performing cobra maneuvering in which the angle of attack of the aircraft reaches upto 90 degree [22]. Under such high angle-of-attack maneuvers, the flow field around the aircraft is extremely complex and the aerodynamics shows strong nonlinearity and unsteadiness which causes loss of lift created by aircraft structure and the wing [4]. This highly nonlinear and complex performance of the aircraft can be achieved through gas dynamics by using thrust vectoring control technique [5]. This type of highly nonlinear and complex nature of the behavior cannot be easily described by physical governing law because there are lots of cross coupling effects during system operations [6]. The modeling of such nonlinear behaviors that exist due to separated air flow, structural/propulsive/aerodynamic interactions/mass properties changes, etc., is absolutely critical and unstructured task [27]. The use of fuzzy logic based methods can effectively describe these aerodynamic systems without need for formal model structure determination with physical laws. Fuzzy logic has modeling capability in the form of set of fuzzy IF-THEN rules, which can describe the system behavior in each zone of operation with more clarity and interpretation [24, 29]. In this modeling method expert opinion (from experienced aircrew and ground crew) can also be implemented in the form of linguistic rules [13].
In general, type-1 fuzzy logic systems are applied for modeling in various application areas [28, 30], but in case of presence of uncertainty in the measurement or in the data, type-2 fuzzy model proves better alternative as compared to type-1 [13–16, 31]. These uncertainties are associated with measurements of aerodynamic data through various sensors in post stall maneuvering flight conditions [4]. These operating zones are having high degree of nonlinearity and complexities for describing the system operations. Under this situation, type-2 fuzzy system provides additional degree of freedom to model the uncertainties. The type-2 fuzzy logic system can easily describe the time varying data generating system with unknown mathematics or non-stationary measurement noise with unknown mathematical description [15].
Brief overview of IT2-TS fuzzy methodology
A first-order interval type-2 Takagi-Sugeno (IT2-TS) fuzzy system is used for generating fuzzy IF-THEN rules for modeling of angle of attack sensor from given set of training input and output flight data.
A set of fuzzy IF-THEN rules for defining the input-output relations of a system can be expressed as [13–16, 31].
Type-2 Gaussian upper grade membership function for premise variable with a fixed mean
In the similar way lower grade membership function of premise variable is defined as Equation (10).
The estimated output for k
th
sample are obtained as weighted average of all the activated rules as Equation (11)
The net true value of each rule is obtained by taking the mean of firing strength of lower and upper membership grade.
The architecture used for modeling of angle of attack sensor based on interval type-2 TS fuzzy system is shown in Fig. 2. The approach for model identification is divided in two steps: first structure identification and second one is the parameter identification [21, 29]. Gustafson and Kessel (G-K) based clustering algorithms are applied to identify the premise parameters. In the next part premise parameters are modified for interval type-2 TS fuzzy systems. After obtaining the type-2 premise parameters upper and lower membership functions are determined. Weighted least square algorithm is used for identification of consequent parameters.
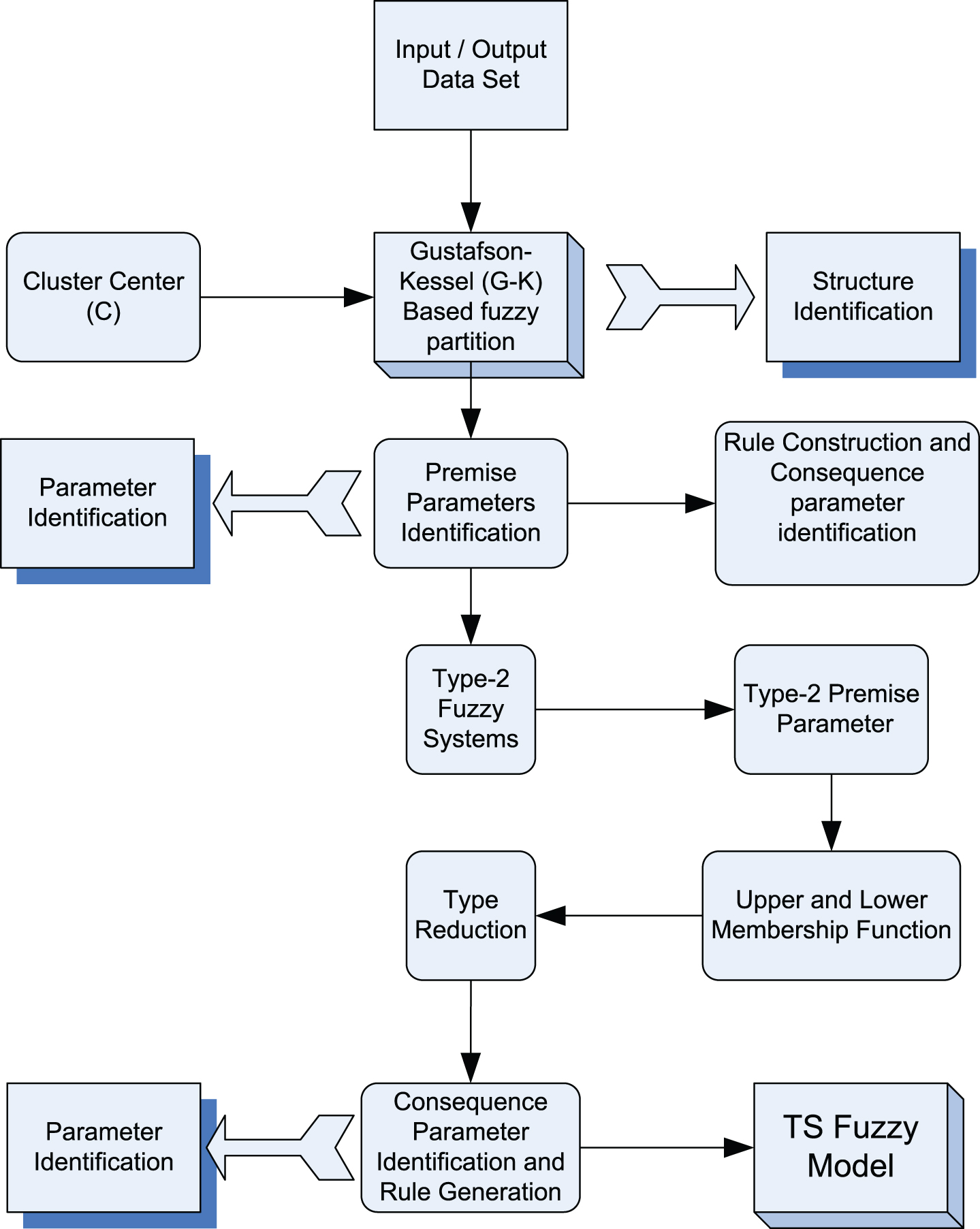
Architecture of IT2-TS fuzzy model.
The structure identification involves identification of potential input candidates, partitioning of input spaces and generation of appropriate number of rules [21].
Selection of potential input variables
Selecting the potential input variables from all possible input variables is the important aspects for modeling of angle of attack sensor. Incorporating the potential input variables to the model provides a simpler, more reliable and more useful model. The objective of this process is to reduce the input dimensionality of the model without reducing the significant loss in accuracy.
Larger the output change caused by a specified input variable signifies its potential importance as the input candidate for the model. In the black box modeling there are few heuristic search methods are available as the combinational problem [20, 21]. In [21] Sugeno and Yasukawa presented GMDH (group method of data handling) based regularity criteria for selection of potential input variables.
But in our case based on physical governing law used for deriving angle of attack parameter of the aircraft [3], potentially effecting input candidates are airspeed, vertical acceleration and pitch angle parameters, respectively.
Partitioning of input spaces
For determination of optimal number of fuzzy rules, the suitable number of clusters from the given input spaces is desired. The effective partition of input space can reduce the number of rules and improves the computational efficiency and interpretability of the fuzzy model [28]. Various clustering algorithms are widely used in structure identification for classification of input-output data such as FCM [17], G-K [8], FCRM [31] and GG [11]. In this paper, Gustafson and Kessel (G-K) based clustering algorithm is used [8]. This clustering method gives hyper ellipsoidal type clusters based on Mahalanobis distance norms, which can provide the clusters of different geometric shapes. Each cluster is having its own norm inducing matrix Λ i with inner product distance norm as [18].
Here, C represents the number of clusters with cluster center
The objective function of G-K algorithm is as Equation (16)
With following constraint
Here, μ ik represents membership degree of k th data point in i th cluster and m represents fuzziness parameter.
The objective function can be minimized by varying the norm inducing matrix Λ i while keeping its determinant fixed, thus optimizing the cluster shapes with constant volume.
The cluster centers are obtained as Equation (17)
The fuzzy covariance matrix for i
th
cluster is as Equation (18)
The norm inducing matrix Λ
i
is calculated as the normalized inverse of the cluster covariance matrix as Equation (19)
The fuzzy partition matrix are updated based on distance norm as Equation (20)
4.1.2.1 Partition validation The performance measure to evaluate the validity of data partitioning depends upon separation among clusters and compactness of the clusters. Cluster partition validity is the criteria to obtain the optimum number of clusters that minimizes (maximizes) the validity measure.
Various cluster validity measures are proposed in the literature such as cluster Partition Coefficient (PC) and Classification Entropy (CE) proposed by Bezdek, cluster Partition Index (PI) and Separation Index (SI), Xie and Beni’s Index (XB) and Dunn’s Index (DI) [2, 32].
In this paper, we have used Partition Coefficient (PC) and Partition Index (PI) based validity measure to identify the optimal number of clusters.
Partition Coefficient (PC) generally measures overlapping between clusters and as Equation (21)
The optimal number of clusters is found at its maximum value.
Partition Index (PI) is ratio of the sum of compactness and separation of the clusters and represented as sum of individual cluster validity measures normalized with division by the fuzzy cardinality of each cluster as Equation (22)
The lower value of partition index (PI) indicates a better partition.
Parameter identification includes identification of membership function parameters (premise parameters) and coefficients of consequent parameters [24, 29].
Identification of type-1 premise parameters
Gaussian type function is used to represent the antecedent membership functions associated with each input variables. Each cluster center obtained as the result of G-K clustering, represents the mean of associated antecedent membership function computed by using obtained membership degree as Equation (23)
Here, C represents the number of clusters and n denotes number of input parameters.
The standard deviations is calculated from cluster covariance matrix [31] as Equation (24)
The premise parameters of type-1 fuzzy model are modified by interval type-2 fuzzy systems [31].
Gaussian membership function having fixed mean (
The upper and lower mean (
The width (standard deviation) of upper membership function of interval type-2 fuzzy sets is defined as Equation (26)
The width of lower membership function is obtained by scaling of upper membership function. The scaling factor η is used to correlate the width of lower and upper membership function as Equation (27)
By substituting the premise parameters (
Local parameter estimation approach based on weighted least square method is used for optimization of rule consequent parameters [12, 24].
Consequent parameter vector for each of these i = 1, 2 . . . . . . . M estimations (rules) are
A linearized local model with the output
Here,
In weighted least square optimization the weighting factors in terms of fuzzy basis function φ
i
(x) are given as Equation (33)
Fuzzy basis functions associated with each rule are [13].
The weighted least square solution for the parameters of the rule consequent is given by
Here, Q i represents the diagonal matrix associated with fuzzy basis function φ i (x (k)).
For validation of effectiveness of developed fuzzy model, the Mean Square Error (MSE) and Root Mean Square (RMSE) based evaluation indices are used that are defined as Equation (39) [30].
Here y
k
is actual system output and
For demonstration purpose recorded and pre-processed input-output data of the VFW-614 ATTAS aircraft undergoing quasi-steady stall maneuver are used [26]. The IT2-TS fuzzy system is designed to model the angle of attack sensor of the aircraft without any reference to the physics behind the stall hysteresis. The complete nonlinear flight data set comprising 5000 data points (200 sec) are used for modeling purpose. Out of 5000 data points, 4000 (160 sec) data points are used for training the model and rest 1000 (40 sec) for testing purpose. To get the confidence in adequacy of the generated model, comparison with other modeling methods and five-fold cross validation test are carried out. The implementation algorithm is given as:
Interval Type-2 TS Fuzzy Model of Angle of Attack Sensor
Interval Type-2 TS Fuzzy Model of Angle of Attack Sensor
A set of training data from the aircraft containing airspeed, vertical acceleration and pitch angle are used as an input parameters and angle of attack as an output parameter. The input parameters are clustered based on G-K clustering having three partitions for each input. The partitions are selected based on Partition Coefficient (PC) and Partition Index (PI) validity measures, the optimum number of partitions are based on maximum value of Partition Coefficient (PC) and minimum value of Partition Index (PI). The numerical value of validity measures with varying number of clusters are as per Table 1.
Clusters validity measures
Clusters validity measures
Based on input space partitioning total 27 numbers of rules are identified and each rule corresponds to the local linear model.
The scaling factor (η) used for determining the width of lower membership function from the width of the upper membership function are selected based on minimum value criteria of Mean Square Error (MSE) and Root Mean Square Error (RMSE) of the model as per Table 2.
Error histories of IT2-TS with scaling factor
Based on above criteria the optimum value of scaling parameter is taken as η = 0.8.
The premise parameters i.e mean (υ) and standard deviations
Premise parameters
Premise parameters
The pictorial representation of input membership functions are given in Figs. 3–5.
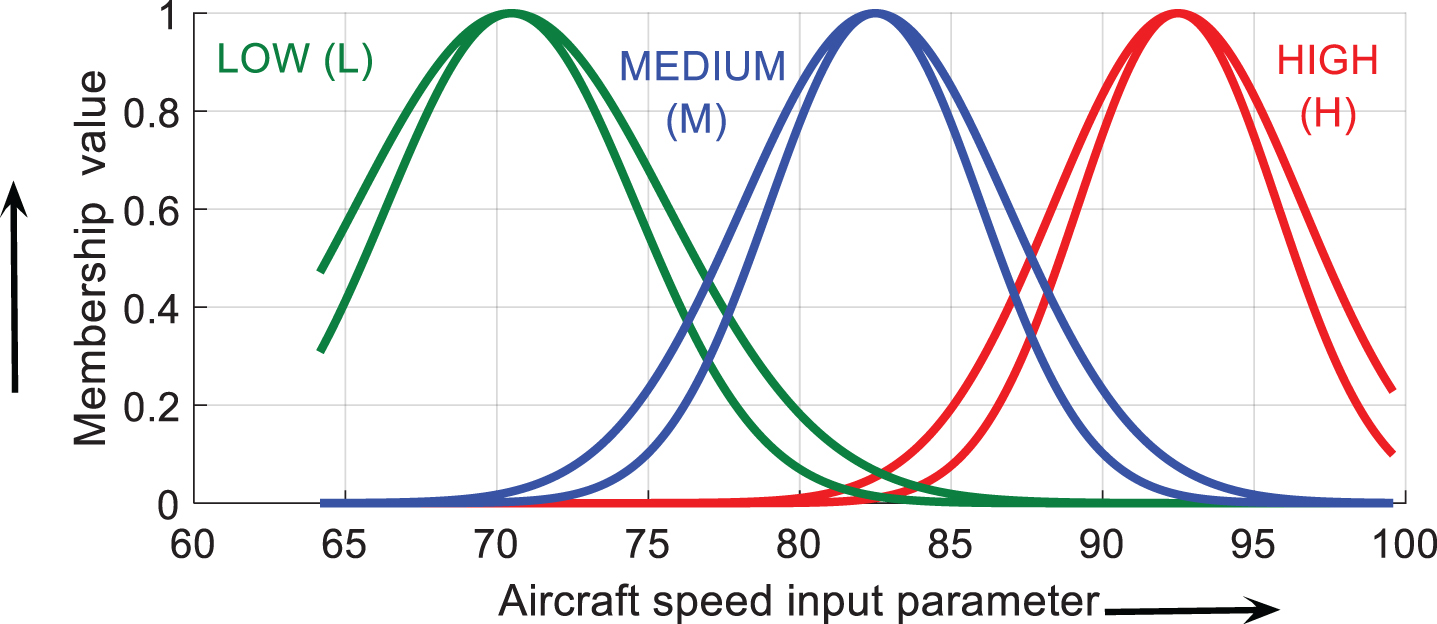
Membership function aircraft speed.
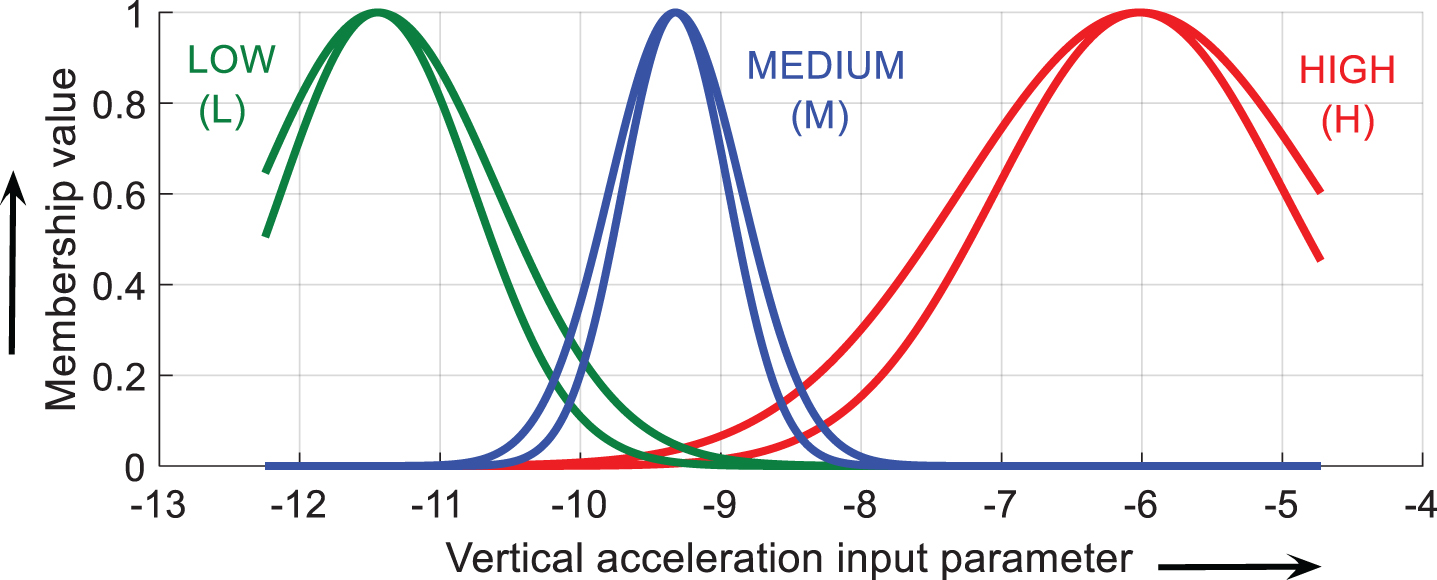
Membership function vertical acceleration Z axis.
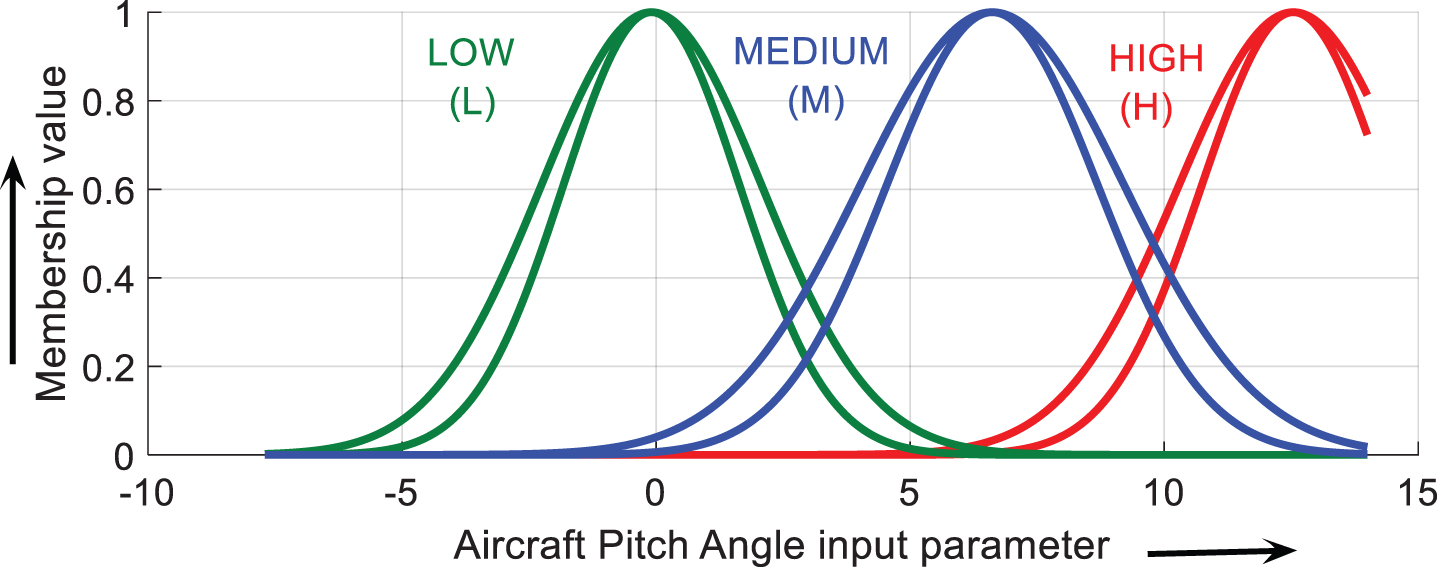
Membership function pitch angle.
The rule base structure for interval type-2 TS fuzzy model with uncertain standard deviation in Gaussian membership function is constructed for various combinations of partitioned input space vectors. Table 4 illustrates the 27 generated fuzzy rules for angle of attack sensor model.
Fuzzy rule base
Fuzzy rule base
The consequent parameters obtained from each rules are associated with local linear models and same are summarized in Table 5.
Consequent parameters for 27 rules
Consequent parameters for 27 rules
To assess the adequacy of the generated interval type-2 TS fuzzy model, time histories of estimated angle of attach parameter (
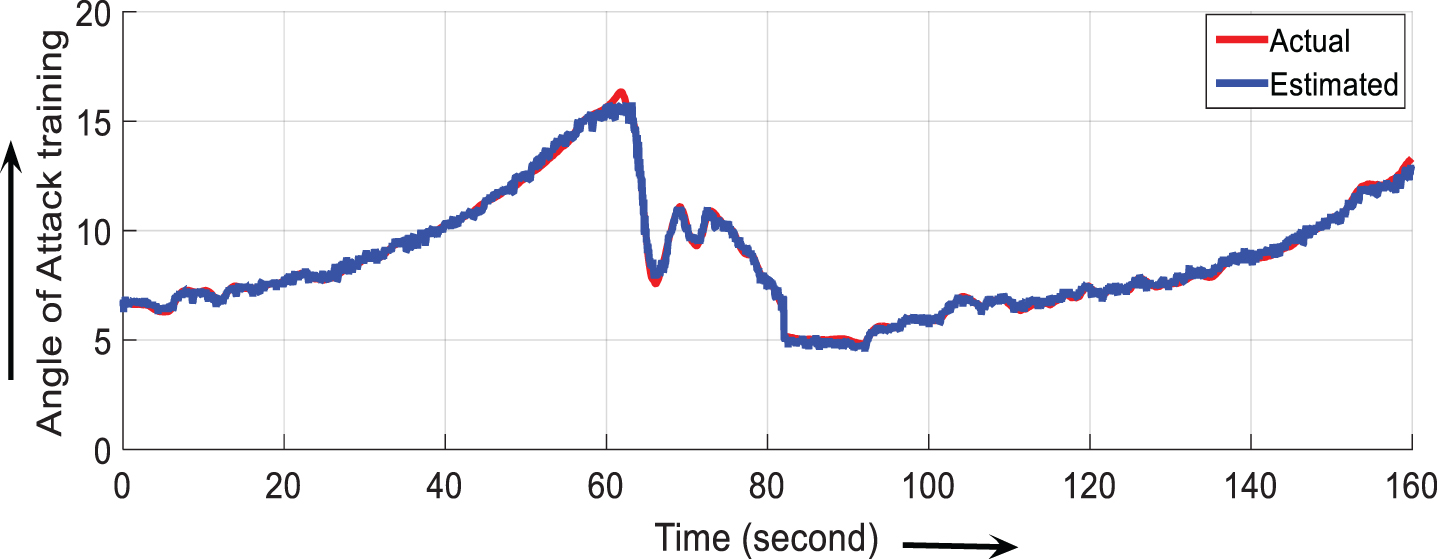
Angle of Attack parameter tracking for training data.
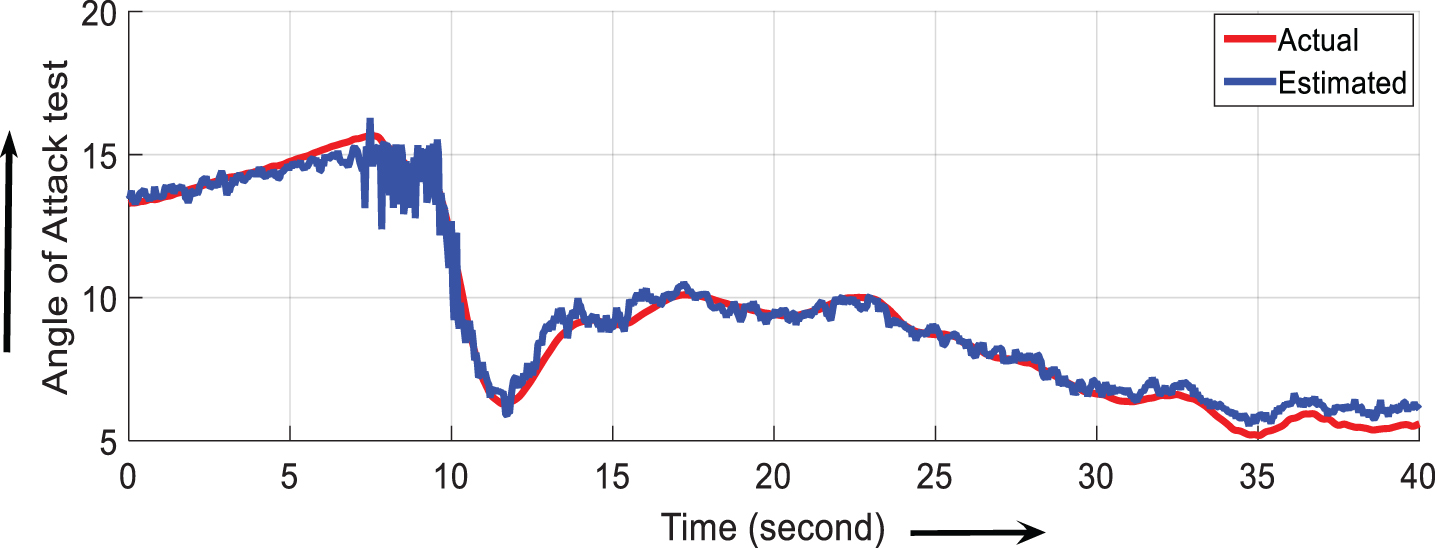
Angle of Attack parameter tracking for testing data.
The performance comparison of interval type-2 TS (IT2-TS) fuzzy model are carried out with other modeling methods such as type-1 TS fuzzy model, Adaptive Neuro Fuzzy Inference System (ANFIS) [19] and Radial Basis Function Neural Network (RBFNN) [33] based models.
The ANFIS model is developed using three sigmoidal type membership functions for each input variables, the premise parameters are tuned using gradient descent method and optimization of consequent equations via least square estimation. The RBFNN model is trained by hybrid learning with K means clustering for training of RBF centers and Recursive Least Square (RLS) method for weights tuning. The Mean Square Error (MSE) and Root Mean Square Error (RMSE) parameters are used as performance measures and obtained results are as per Table 6. The IT2-TS fuzzy model shows comparable performance with ANFIS based modeling. The comparison results also show improved modeling capabilities of interval type-2 TS fuzzy model as compared to RBFNN and type-1 TS Fuzzy model.
Comparison of Different Methods of Modeling
Further the adequacy of developed interval type-2 TS fuzzy model is assessed by applying five-fold cross validation technique, in which complete data points (5000 numbers) are divided into five equal parts (1000 numbers) and cross validation test is carried out. The measured mean square error histories for each segmented training and testing data are given in Table 7.
Fivefold cross validation error histories
This paper presented a methodology for modeling of angle of attack sensor of the aircraft by using interval type-2 TS fuzzy logic theory. The angle of attack signal is used as a scheduling variable in flight control computer for governing the flight control laws, hence any failure or malfunction of the sensor can lead to catastrophic damage of the aircraft. In proposed methodology angle of attack signal is estimated indirectly by means of interval type-2 TS fuzzy logic theory with the data obtained from aircraft speed, vertical acceleration and pitch angle sensors. The methodology shows its benefits for formulating a data driven standby model in case of failure of actual angle of attack sensor. The presence of uncertainty in the measurement or in the data can be directly addressed by using the type-2 fuzzy logic theory. The concept is demonstrated by using the recorded flight data of VFW-614 ATTAS aircraft undergoing quasi steady stall maneuver without any physics behind the stall hysteresis. The premise parameters of the model are obtained by using Gustafson and Kessel (G-K) clustering algorithm. The rule consequent parameters are estimated based on weighted least square method. The comparative study with other modeling methods and fivefold cross validation test between model estimated data and actual angle of attack sensor data shows well suited modeling capability of the proposed interval type-2 TS fuzzy model.