
Abstract
Considering the fast time varying characteristic of pitch channel model of hypersonic model with coupling of engine, a kind of hybrid attack angle tracking controller is designed based on variable structure and Taylor type FLNN neural network method. And the adoption of variable structure control method make the system response very fast and robust. The Taylor type FLNN neural network is constructed with the format of fitting function which is used to describe the force and moment caused by attack angle, so it can compensate the interruption caused by the uncertainty and unconsidered factors effectively. At last, detailed numerical simulation is done to testify the rightness of the proposed hybrid method.
Introduction
The control of hyper-sonic aircraft [1–12] has attracted more and more interests of researchers among many countries since its fast time varying and strong non-linearity characteristics in model caused great challenges to controller design. Especially the coupling of engine and elastic shape brings more difficulties to the system control. And because it is difficult to get accurate model because of the limit of current experiment ability, and also there is big system uncertainty [12–16] in the real high speed flying in high space, so the controller should be strong and robust, which is also the main problem of hyper-sonic aircraft control [17–28].
Variable structure control has been applied in hyper-sonic vehicle control since it has strong robustness and swiftness [1–4]. Shtessel designed a kind of flying control system for X33 by using sliding mode control method in 1997 [5], 1998 [6], 2000 [7] and 2005 [8]. And good control effect was achieved. After that, he used a kind of SMDO (sliding mode disturbance observer) method to improve the performance of control system. Shtesselt used two sliding mode control which is a novel method. The inner sliding mode controller is designed for the force dynamic differential equation model and the outer sliding mode controller is designed for the movement dynamic differential equation. So the advantage of this strategy is that the tracking of attitude angle and angle speed can be realized together. In this paper, in order to integrate the advantages of variable structure control and neural network method, a kind of hybrid method based on variable structure control and FLNN(function linked neural network) method is proposed to solve the system uncertainties. So the controller has the adaptive ability as neural network to cope with model uncertainties, and it also has the strong robustness and swiftness as a variable structure controller. At last, a Lyapunov energy function is chosen to guarantee all the signals of system are stable.
The paper was organized as following six sections. The first section was the introduction of this paper. The second section was used to describe the main model of this paper. The third section was used to explain the FLNN neural network used in this paper. The fourth section was the main design process of hybrid control law. The numerical simulation result was given in the fifth section. And the final section was used to give the main conclusion of this paper.
Model description
Considering the elastic shape structure, a kind of pitch channel hyper-sonic aircraft model built according to Lagrange equation is released by USA air force as followed:
Where parameters are defined as
Where T is the thrust force, D is the resistance force, L is the lift force, M is the pitching moment, and C
D
is calculated as
C
Tφ
is calculated as
C
T
is calculated as
And
C
L
is calculated as
C M is calculated as
where
And it can be expanded respectively as below
And V is speed, γ is the speed angle, α is attack angle, q is the attitude angle speed, h is the height. φ is the oil supplying factor, δ c is the duck wing and δ e is the lift rudder.
FLNN(Functional Link Neural Network) was first proposed by F.L. Lewis and it is a kind of adaptive control algorithm with online regulation of network weights based on no source theorem. Also the chosen of neural cell of hidden layer and the controller design are discussed on situations that the estimation error of neural network is bound or not bound. He also pointed out that the accuracy of estimation of neural network can be decreased in order to reduce the complexity of the structure of network, also an additional robust item can be added to compensate the big error caused by the reduce of neural cell. In this paper, a kind a Taylor type FLNN neural network with power functions as basic functions is constructed as follows, the output of network can be written as
Where
Where p is an variable transformed by input variable, and transformation can chose a function as
Also it can be chosen as simple as p = x.
If use the above FLNN neural network to approximate a nonlinear function f (x), then it can be written as
Where ɛ (x) is the estimate error of neural network. According to the neural network approximation theorem, there exists an optimal weights
for any small ɛ
N
. Obviously, for the nonlinear functions in hypersonic models as
According to above attack angle model, it can be written as
And it can be arranged as
Substitute the equation of lift expression, it can be transform as
And the lift air coefficient can be expanded as
And use the thrust expression, it can be written as
According to the thrust air coefficient expression, it can be arranged as
Define new variables as follows
then
Consider that the system uncertainty is mainly caused by air dynamic coefficients, so a kind of FLNN neural network is used to approximate the function a4f1 (α) + a5f2 (α) φ + a5f3 (α). To make the structure of neural network simple, two neural networks are used. The first one W1B1 is used to estimate a4f1 (α) + a5f3 (α), the second one W2B2 is used to approximate a5f2 (α), then according to previous introduction, there exists optimal weights of network
And
With out loss of generality, assume the ideal value of attack angle is α d = -2/57.3, then the error variable is defined as e α = α - α d , then
Define a kind integral sliding mode as:
Solve its derivative as
Then the hybrid controller with FLNN neural network and variable structure method is designed as
where
Use a even allocation strategy for control, then it can be written as
Then the control can be solved as
And the regulation of neural network weights are designed as
Choose a Lyapunov function as
Solve its derivative as
where
So it is easy to prove that
Then the sliding mode surface can converge to 0, and then attack angle error can converged to 0, and the task of attack angle tracking is fulfilled.
Simulation was done according to above control law and the initial height is set as h0 = 85000 * 0.3048, the initial speed is set as V0 = 7846 * 0.3048, the initial attack angle is set as α0 = 0.0174, and other initial states are set as: γ0 = 0, q0 = 0, η10 = 0.4588 * 0.3048 * 14.59 η20 = -0.08726 * 0.3048 * 14.59, η30 = -0.03671 * 0.3048 * 14.59, and the oil supply law is set as PID control law and soft function as follows:
Figure 1 shows the curve of attack angle, and it is obvious that the first part of output curve has a overshoot since the variable structure method has a weak damping ration which makes the response very quick, so it makes this strategy is suit for the situation that the accuracy of attack is not demanded to be very high but the response of aircraft should be very quick. And the latter two shakes are caused by the discontinuous speed control strategy, which can be testified by comparing with Figs. 3 and 11. Figures 114 shows the detailed curves of states of hypersonic aircraft with hybrid variable structure and FLNN control strategy, where Figs. 810 shows the constant elastic shape. And the control effect of attack angle tracking is very good with out considering the change of elastic shape, or it will make the design of controller more difficult.
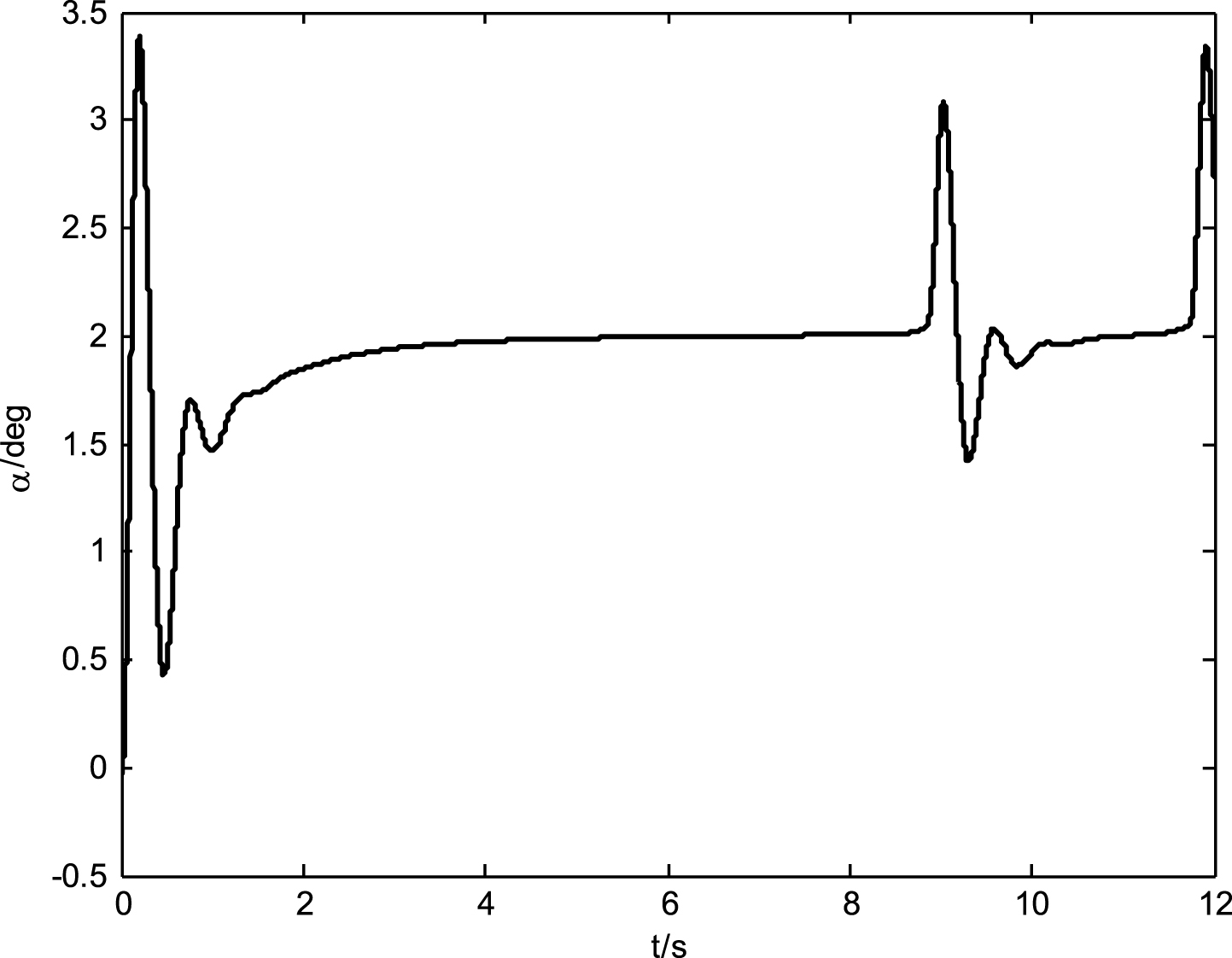
The curve of attack angle.
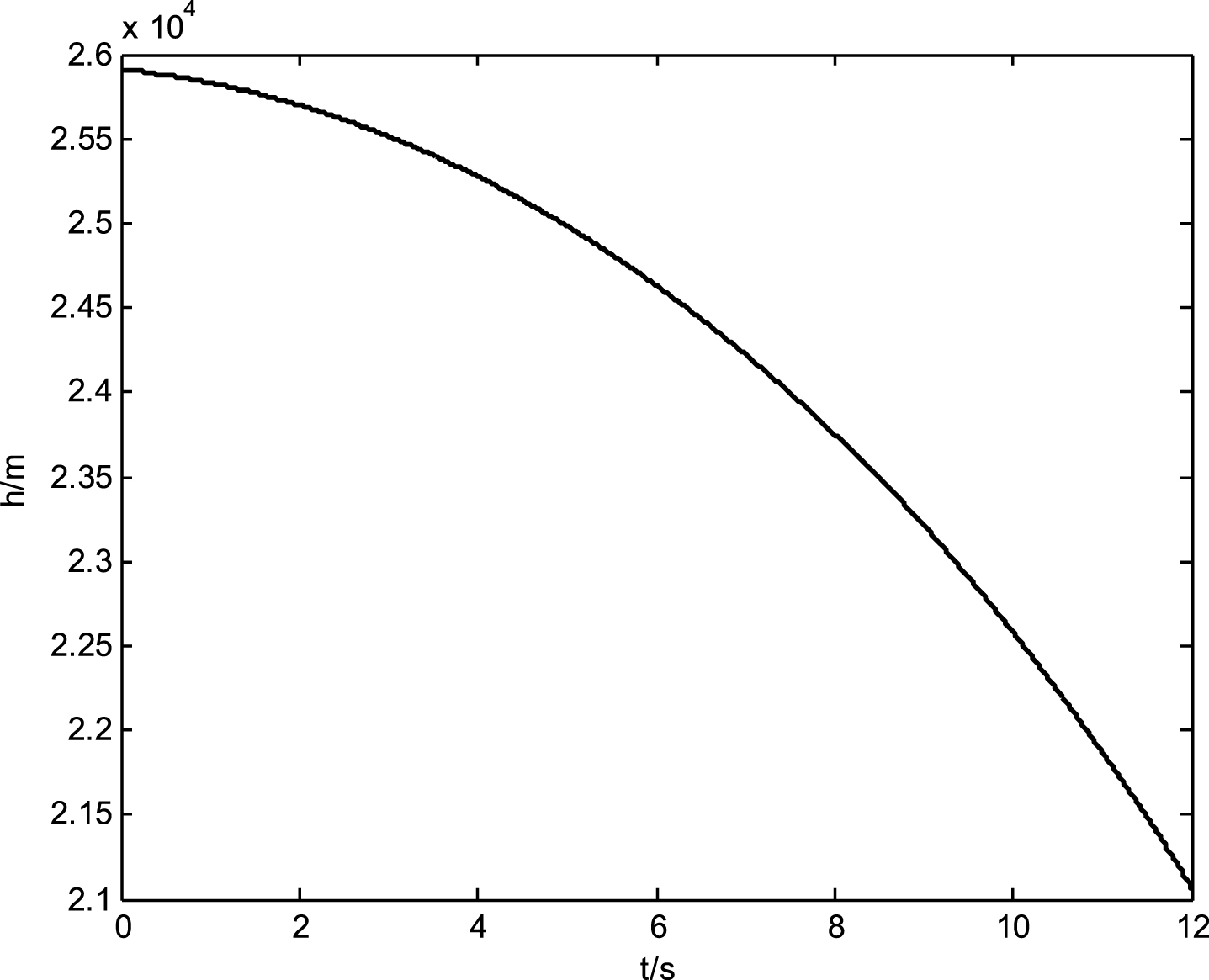
The curve of the height.
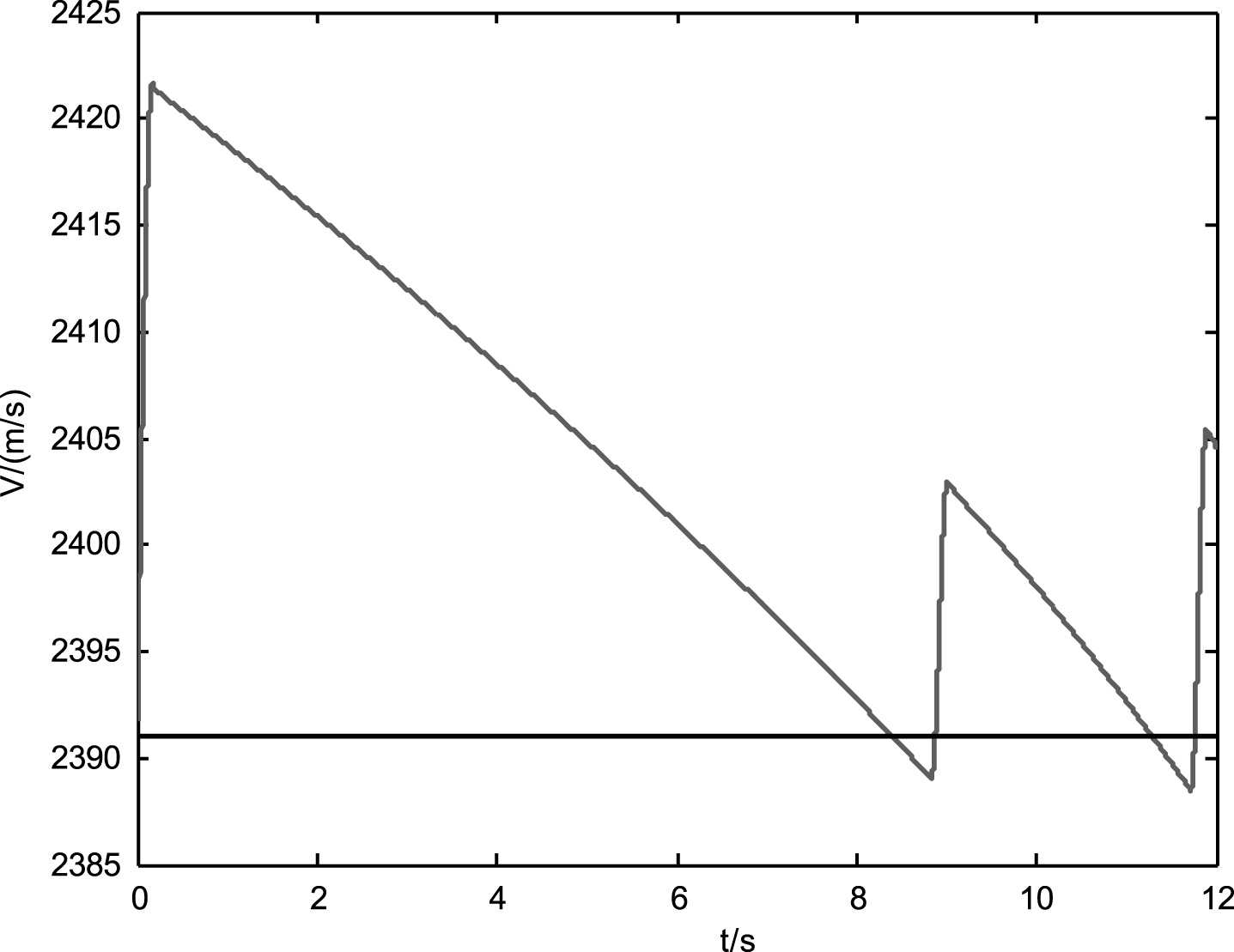
The curve of speed.

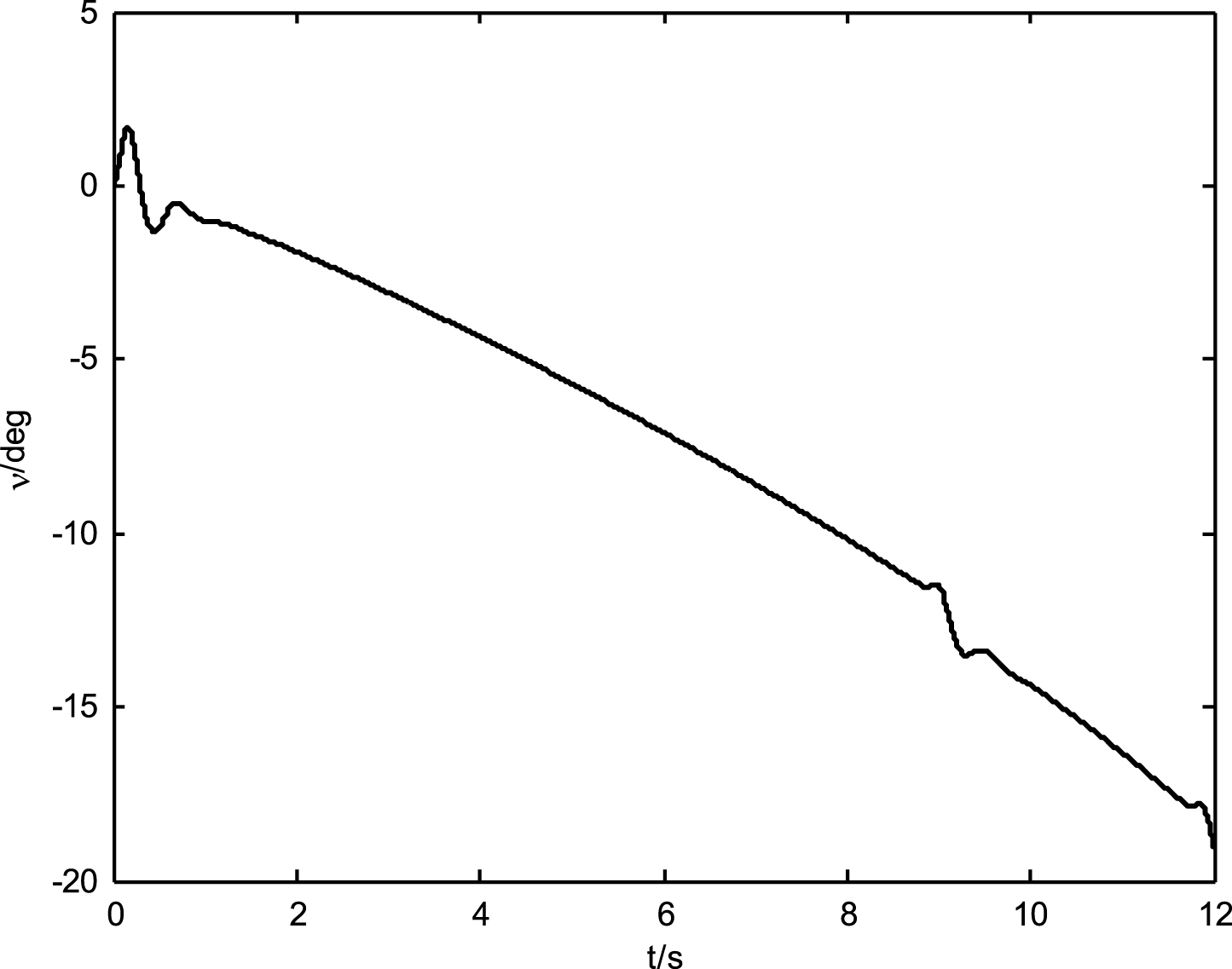
The curve of speed angle.
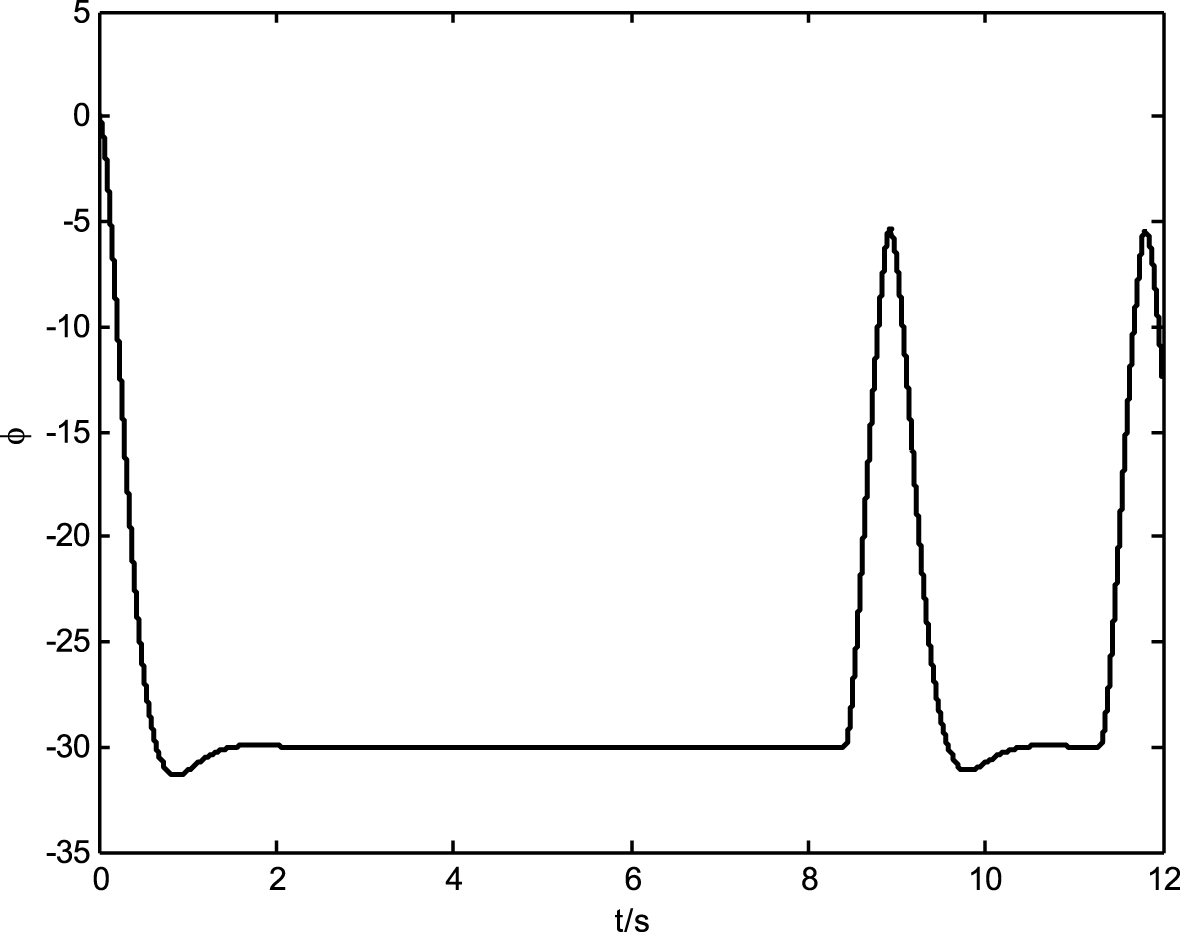
The curve of oil supplying factor.
The curve of thrust.
The curve of resistance.
The state of first elastic shape
The state of second elastic shape.

The state of third elastic shape.

The curve of speed error.
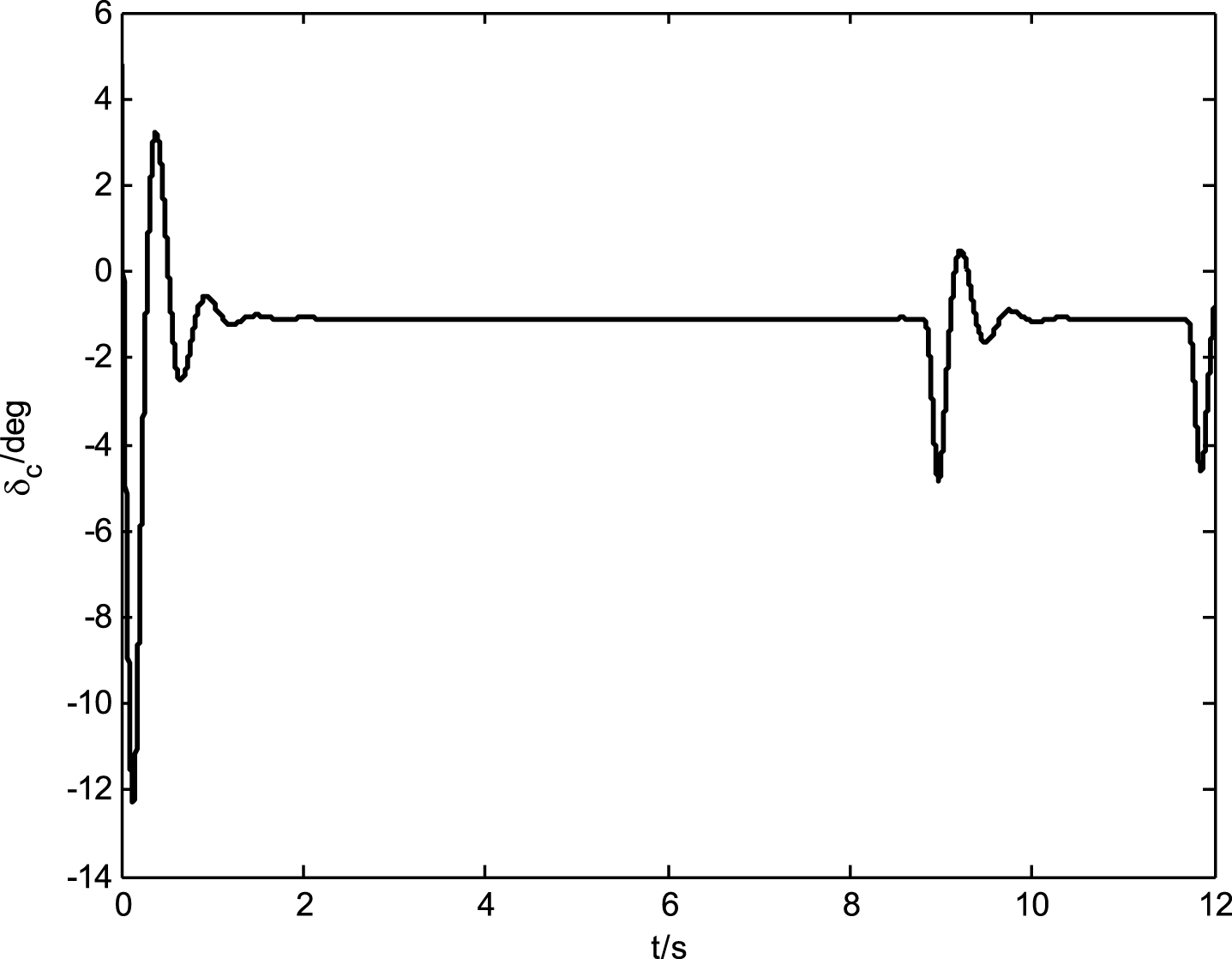
The curve of duck wing.
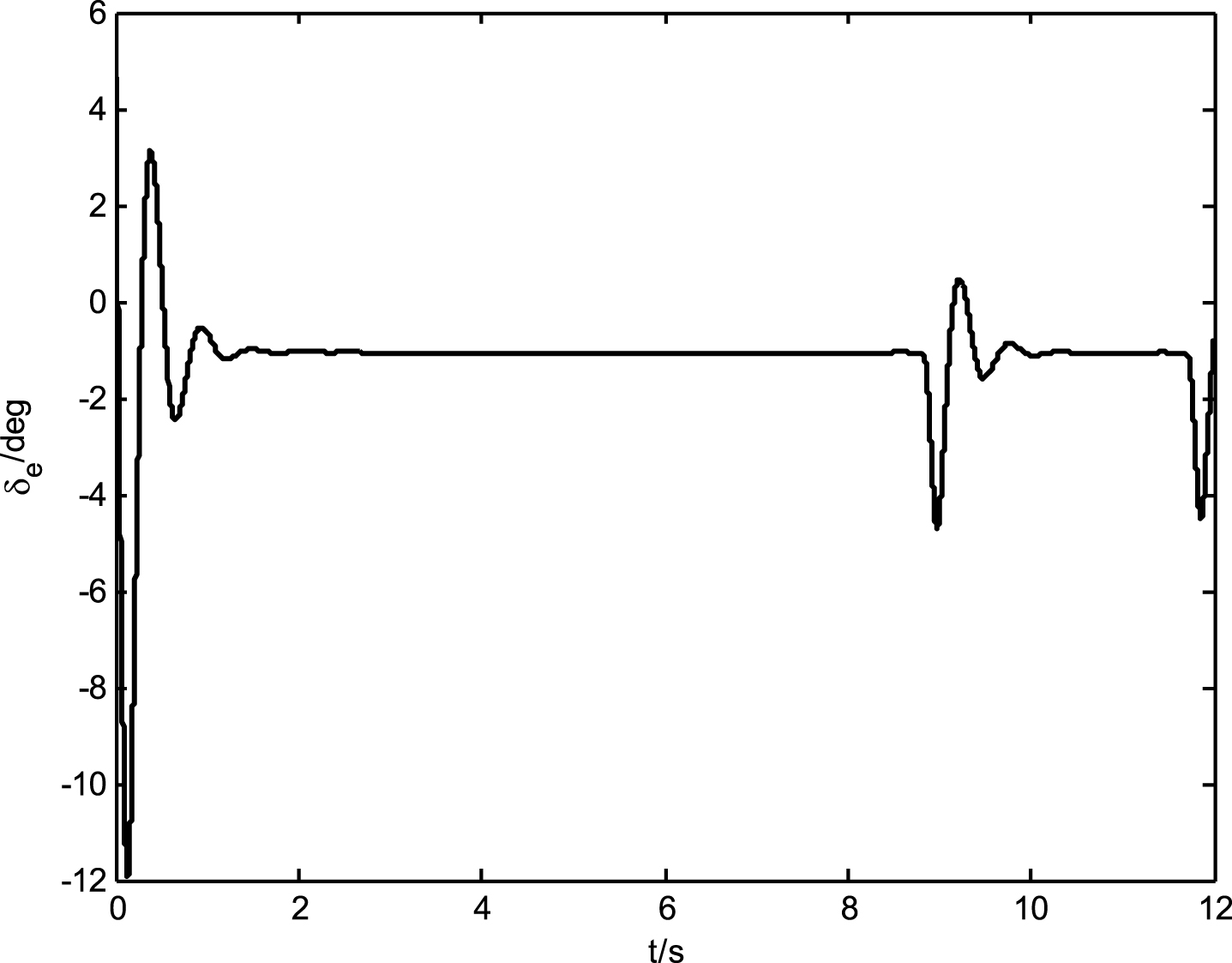
The curve of the lift rudder.
The curve of attitude angle.
The attack angle tracking control is searched based on a kind of hypersonic aircraft pitch channel model revealed by USA air force. Because of the static unstable characteristics of attack angle and the fast time varying characteristic of hypersonic aircraft, a kind of variable structure method is introduced since its has strong robustness and quickness. And a kind neural network method is used to compensate the interruption caused by the uncertainty and unconsidered factors which is very possible for the complexity and strong uncertainty of hypersonic aircraft. Since the force and moment in the above model are fitted with a polynomial function, so a kind of FLNN neural network is constructed with power function as basic function. At last, detailed numerical simulation result is done to testify the rightness and effectiveness of the hybrid controller, also it shows that the hypersonic aircraft model is reasonable.
Footnotes
Acknowledgments
This paper is supported by Youth Foundation of Naval Aeronautical and Astronautical University of China, National Nature Science Foundation of Shandong Province of China ZR2012FQ010, National Nature Science Foundations of China 61174031, 61004002, 61102167, Aviation Science Foundation of China 20110184 and China Postdoctoral Foundation 20110490266.