
Abstract
Conversion of the conventional vehicle (CV) into the plug-in hybrid electric vehicle (PHEV) is one of the promising solutions to improve transport sustainability and reduce outdoor air pollution. Energy management is crucial for the performance of PHEV. The paper presents combine rule based-artificial bee colony optimization algorithm for energy management of converted plug-in hybrid electric vehicle (CPHEV). The diesel operated parallel hybrid topology is considered for study with the designed electric powertrain. NOx and PM are considered as optimization parameters along with specific fuel consumption. The performance based on fuel consumption and emissions (NOx and PM) is analyzed by considering sample Indian urban and highway driving cycle. The complete vehicle is simulated using MATLAB Simulink linked with coding. The results of converted PHEV obtained is compared with conventional one for both driving cycles for analysis of the fuel consumption and emissions considering real-time benchmarking norms. The results indicate that the combine rule based-artificial bee colony strategy keeps pollution under control required as per BSIII norms.
Introduction
Literature survey and contribution
A lot of research has been taking place on Energy Management Strategy (EMS) of PHEV mostly on reduction in fuel consumption, emission and few on both, however, there is less attention on conversion of CV into PHEV. Few papers are observed in literature related to the conversion of CV into HEV/PHEV, conversion of HEV to PHEV and converted HEV/PHEV [5–19]. Some of them are related to EMS, however complete vehicle simulation has done for power split in order to obtain fuel economy in most of the cases [5–7] and emissions in [8]. In [5] fuzzy logic controller is used to decide power-sharing during Toyota Prius HEV to PHEV conversion and tested for various driving cycles with different modes and improvement in fuel economy is observed mostly during the low state of charge(SOC) of the battery. In [6] saving of 25% of fuel consumption has shown by the development of split axle parallel HEV with in-wheel-motor using rule-based EMS. Feasibility study and experimental analysis is carried out for 1400 cc diesel engine car converted to the HEV by using BLDC hub motors in [7] and shown significant improvement in fuel consumption with simple on-off strategy. In [8] experimental analysis of a single cylinder diesel engine as a hybrid power unit(HPU) for an HEV is carried out. Results identify the minimum emission range of engine operation and shown the potential for the use of diesel engines as HPU for use of series HEVs. It is observed that most of the conversion concerns with fuel economy and there are no contribution on EMS for reduction in both emissions and fuel consumptions for converted PHEV.
Some of the recently published papers on EMS of PHEV are on: model predictive control [20], Equivalent Consumption Minimization Strategy (ECMS) in [21], improved particle swarm optimization (IPSO) [22], multi input fuzzy logic controller [23], dynamic programming (DP) and rule base for real time [24], an intelligent fuzzy logic control strategy and genetic algorithm (GA) [25], adaptive supervisory powertrain controller (SPC) with dynamic programming(DP) [26], the optimal EMS to balance fuel consumption, raw particulate matter (PM) emissions, and raw nitrogen oxide (NOx) emissions for a diesel HEV [27].
It is observed that most of the strategies are used in optimization of a variety of system parameters for power split of the vehicle to obtain best fuel economy and some with a reduction in emissions, however after power split, if engine needs are operated, the in-depth optimization all emissions of the engine are not considered. Either emissions are considered or fuel consumption and emissions are considered indirectly, however, both fuel economy and all emissions are not considered as optimization parameters. Hence there is a need in investigating energy management strategy which optimizes both fuel economy and emissions. However, fuel economy and emissions minimization are conflicting objectives and hence multiobjective multidimensional problem becomes very complex.
In recent years, swarm intelligence has proven its importance for the solution of those problems that cannot be easily dealt with classical mathematical techniques. Artificial Bee Colony (ABC) algorithm is an evolving optimization algorithm based on the intelligent behavior of a honey bee swarm introduced by Karaboga in 2005 for unconstrained optimization problems. The performance of ABC algorithm is seen to be superior to other evolutionary algorithms constrained optimization, multivariable functions, multi-dimensional numeric engineering problems (high data with surface and counterplots) [28–32]. Due to its simplicity, fewer control parameters, application to complex multidisciplinary and multidimensional problem, in this paper ABC algorithm is used as a global optimization-based technique to optimize the specific fuel consumption and emissions for 70 hp diesel engine in converted PHEV after power split if the engine is required to operate.
Rule-based energy management strategy is a sole strategy that has been commercially implemented due to easy implementation, but it cannot obtain an optimum solution. Optimization based energy management strategy overcomes the inherent drawback of rule-based energy management strategy through optimization control approach, whereas it is hard to implement in real-time control due to the complexity and high computational time [33]. To trade-off between computation complexity and optimization performance of energy management strategy, the combination of rule-based and global optimization-based technique is proposed and used as a controller. The rule-based strategy is used for power split of the hybrid powertrain and ABC optimization algorithm is used to optimize emissions along with specific fuel consumption(FC). NOx and PM along with FC are used as optimization parameters to optimize engine if the engine is required to operate after power split for converted PHEV.
Organization of the paper
The rest of paper is arranged as follows:
In section 2 vehicle configuration and specifications used for proposed work are detailed. Emission and fuel consumption maps are also discussed to get an idea of minimum emission and fuel consumption zones. Section 3 deals with proposed combine rule based-artificial bee colony (RABC) algorithm for converted PHEV. Results are presented in section 4 followed by conclusion in section 5.
Vehicle configuration
The complete CPHEV model is shown in Fig. 1. It can be seen from Fig. 1 that the motor is located before differential and the electromagnetic clutch (EMC) in between engine and motor. The motor supplies power to wheels if EMC is OFF. When EMC is ON engine can be connected to the wheel through gearbox and differential. The motor is powered by the battery through power electronics converter which will act as an inverter during motoring operation and rectifier during braking and regeneration. The plug-in charging facility is provided through power electronic converter will act as a rectifier to charge the battery.

Converted PHEV Schematic Diagram.
As per driver input, the vehicle dynamic block is used to calculate the tractive force required to attain required vehicle speed, the combine rule-based and ABC is used to improve the performance of the vehicle. As per state of charge (SOC) of battery, the required value of torque & speed and considering travel distance required to travel, the rules formed after studying fuel consumption and emissions models to decide power split decision of motor torque and IC engine torque. If the engine needs to be operated, ABC algorithm is used to optimize FC, NOx, and PM. The engine is operated with an optimized value of torque and the modified motor torque is the difference in required value and optimized IC torque delivered. If motor torque is positive then motor will supply torque for a running vehicle. The negative torque indicates extra torque delivered by ICE to charge the battery. Since SOC is low and operation of the engine in the optimum region. The specifications of the designed vehicle are given inTable 1.
Vehicle Specification and parameters [34]
The mapping of engine specific fuel consumption and emissions are studied for forming suboptimal rules. FC, NOx and PM models are shown in Figs. 2–4 obtained from data available in [35] by Oak Ridge National Laboratory.
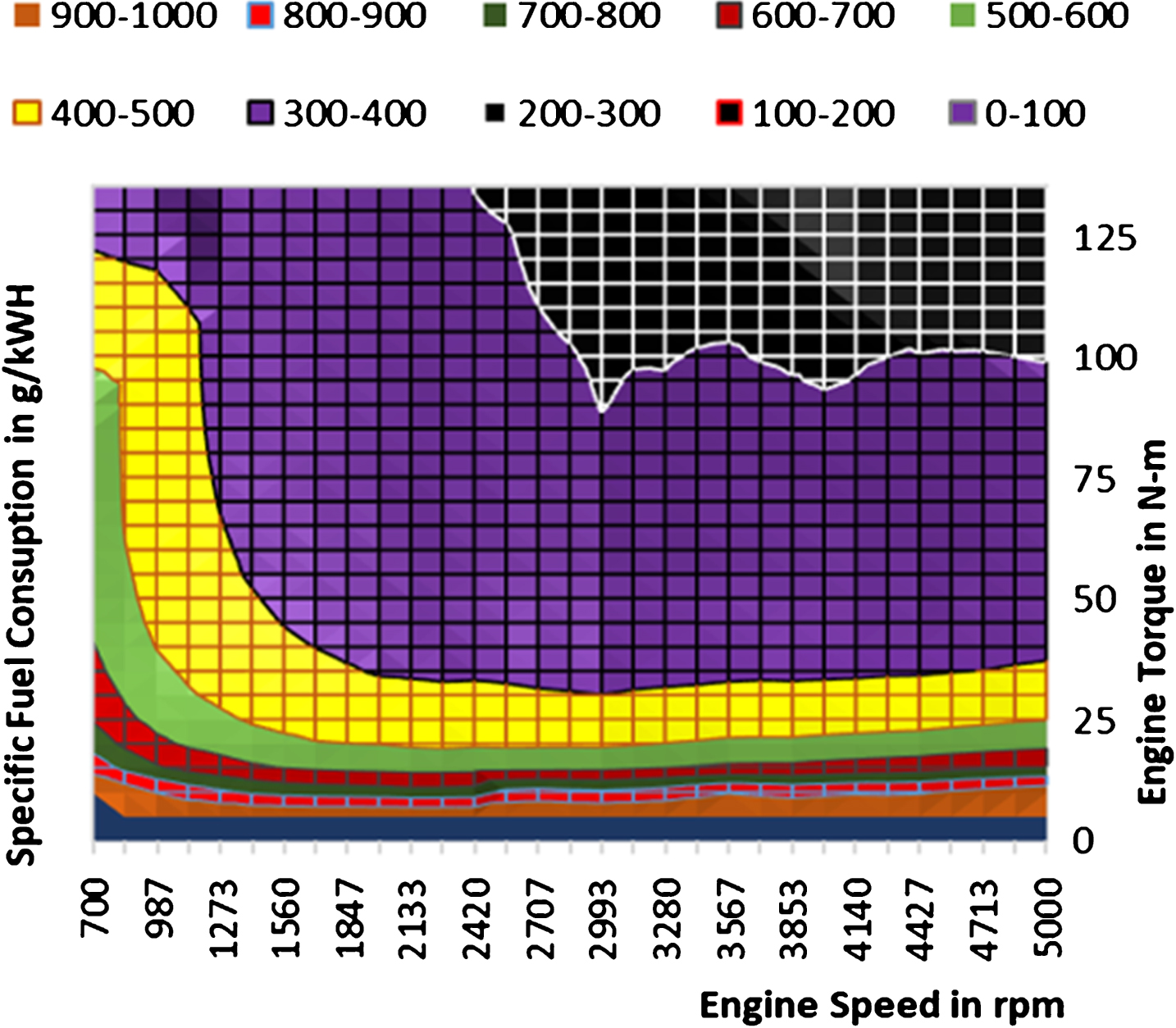
Specific Fuel Consumption.
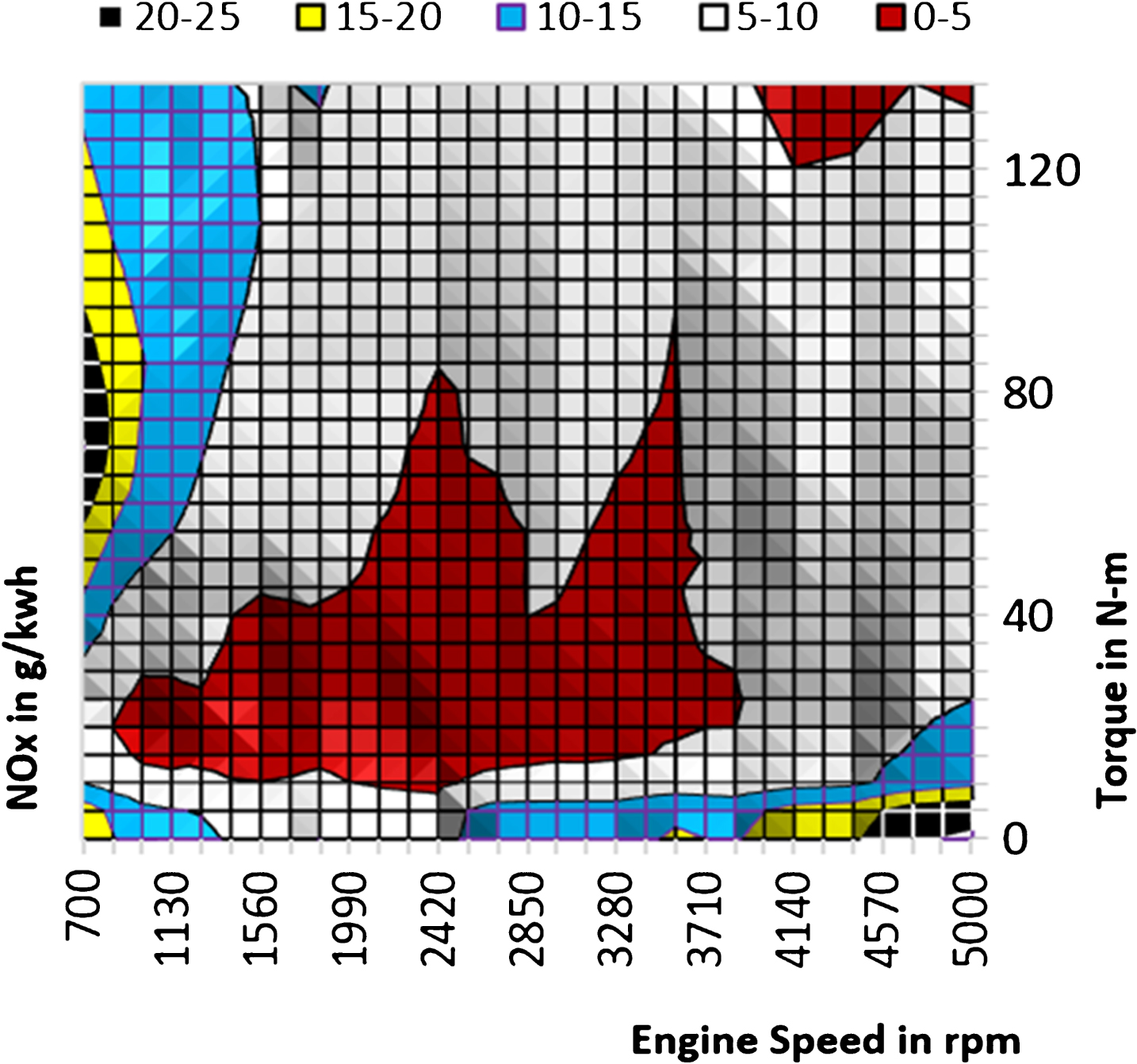
Nox Map.
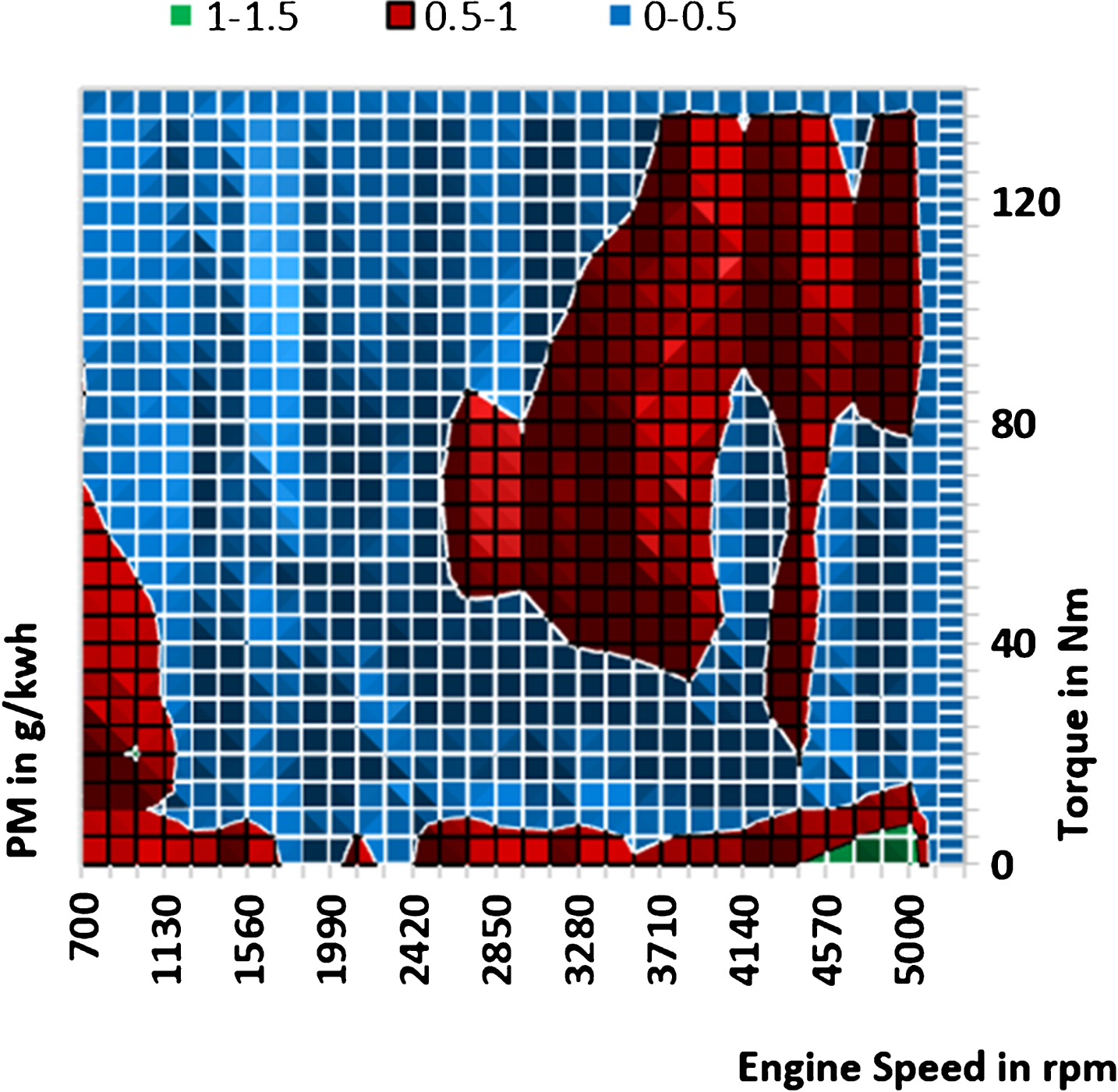
PM Map.
It is observed that specific fuel consumption at low torques is very high like 1000 g/kWh or even more. It is very low at high speed and torque of engine as shown by black region in map around 200–300 g/kWh followed by violet region between 300–400 g/kWh at moderate speed and torque along with higher torque and lower speed. The minimum and maximum values observed are 219.7655 and 2042.062 g/kWh.
It is observed that the NOx and PM are low in slots as shown in the figure shown by a brown map with black lining with lowest emission values for both followed by the white map with black lining for NOx in range 5–10 g/kWh and blue with white lining with a range of 0.05 to 1 g/kWh for PM. The minimum and maximum values for NOx are 3.2389 and 25.6089 g/kWh and for PM are 0.090737 and 1.355324 g/kWh.
Suboptimal zone perceived from analysis of maps of FC, NOx, and PM is used in a proposed strategy to reduce computational time of controller. Due to conflicting nature of different emissions along with specific fuel consumption, optimizing multiple objectives is a critical task.
To trade-off between computation complexity and optimization performance of energy management strategy, the combination of rule-based and global optimization-based technique is proposed for the controller. The flowchart for the same is shown in Fig. 5. As seen in the figure the offline engine maps of fuel consumption and emissions (NOx and PM) are loaded. As per distance required to travel, after checking the state of charge of the battery, speed, and torque requirement the power split decision is taken. If input distance is less than 60 km and SOC is greater than 0.7 then CPHEV is operated in full electric mode. If SOC is less than 0.7 and greater than 0.5 and battery can deliver the power required then the power required is supplied by the battery. If battery power available is less than required power then the engine will operate with optimized ABC algorithm. It will optimize torque such that FC, NOx and PM will be less. If SOC is less than 0.5 then also engine will operate with optimized ABC algorithm.
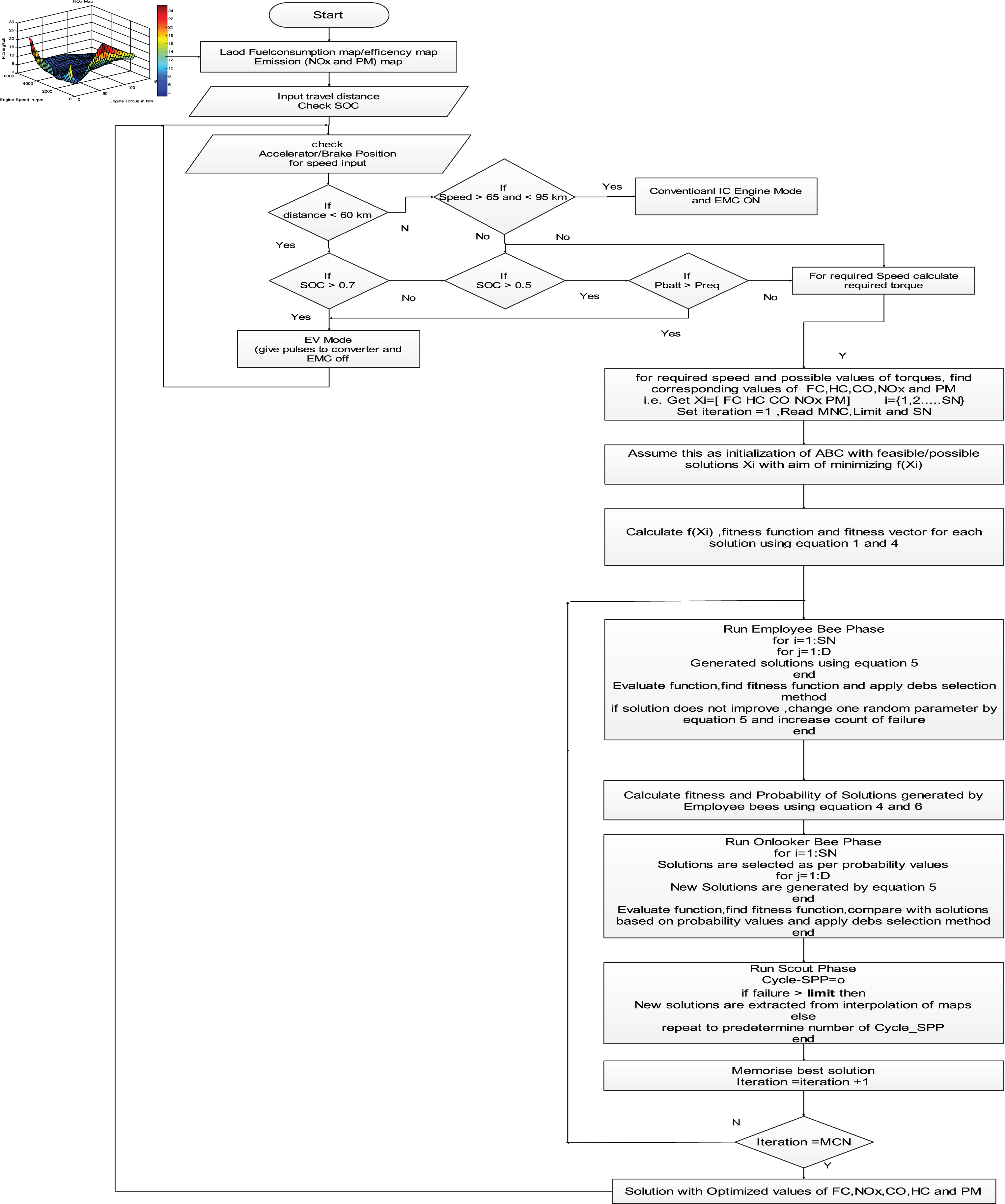
Combined Rule based-ABC Algorithm.
If the distance traveled is greater than 60 km then it will check the speed range. If speed requirement is 65 to 95 km/hr. then it will operate with conventional IC engine mode where the fuel consumption and emissions are minimized.
However, if speed requirement is less than 65 km/hr. and greater than 95 km/hr. then it will check SOC. If SOC greater than 0.5 and battery can deliver the power required then the power required is supplied by the battery. If battery power available is less than required power then the engine will operate with optimized ABC algorithm. It will optimize torque such that FC, NOx and PM will be less. Optimized ABC algorithm will decide the value of torque to minimize FC, NOx and PM.
The input to ABC is required value of engine speed and torque. For the required value of speed, it will generate random values of torque. For all these values of torque, the values of FC, NOx and PM are extracted to get feasible parameter vector (solution vector). Solution vector is used to find values of an objective function, which determines the fitness function. Solutions of better fitness values are stored and the iterative process is followed by generation of new parameter vector in different phases (employee, onlooker and scout bee phase) to calculate objective function and fitness value. This procedure is repeated for a number of cycles mentioned in the algorithm to get best parameter vector with optimized values of FC, NOx and PM.
In this work, the following objective function is considered
The required emission values for a heavy diesel engine as per BSIII norms applicable [36] NOxreq = 7 g/kWh, PMreq = 0.1 g/kWh. The required value of fuel consumption considered is FCreq = 400 g/kWh.
The optimized value of torque should be greater than or equal to required torque and less than or equal to maximum torque.
The fitness function is calculated from
New solutions are generated by Equation 5.
The probability values Pi for the solutions can be calculated by Equation 6.
The sample Indian urban and highway driving cycle are used to check the performance of proposed work. It is also compared with rule-based and fuzzy logic strategy along with the conventional vehicle. The Indian urban driving cycle is shown in Fig. 6 with details in Table 2.

Indian Urban Driving Cycle.
Driving cycle [35]
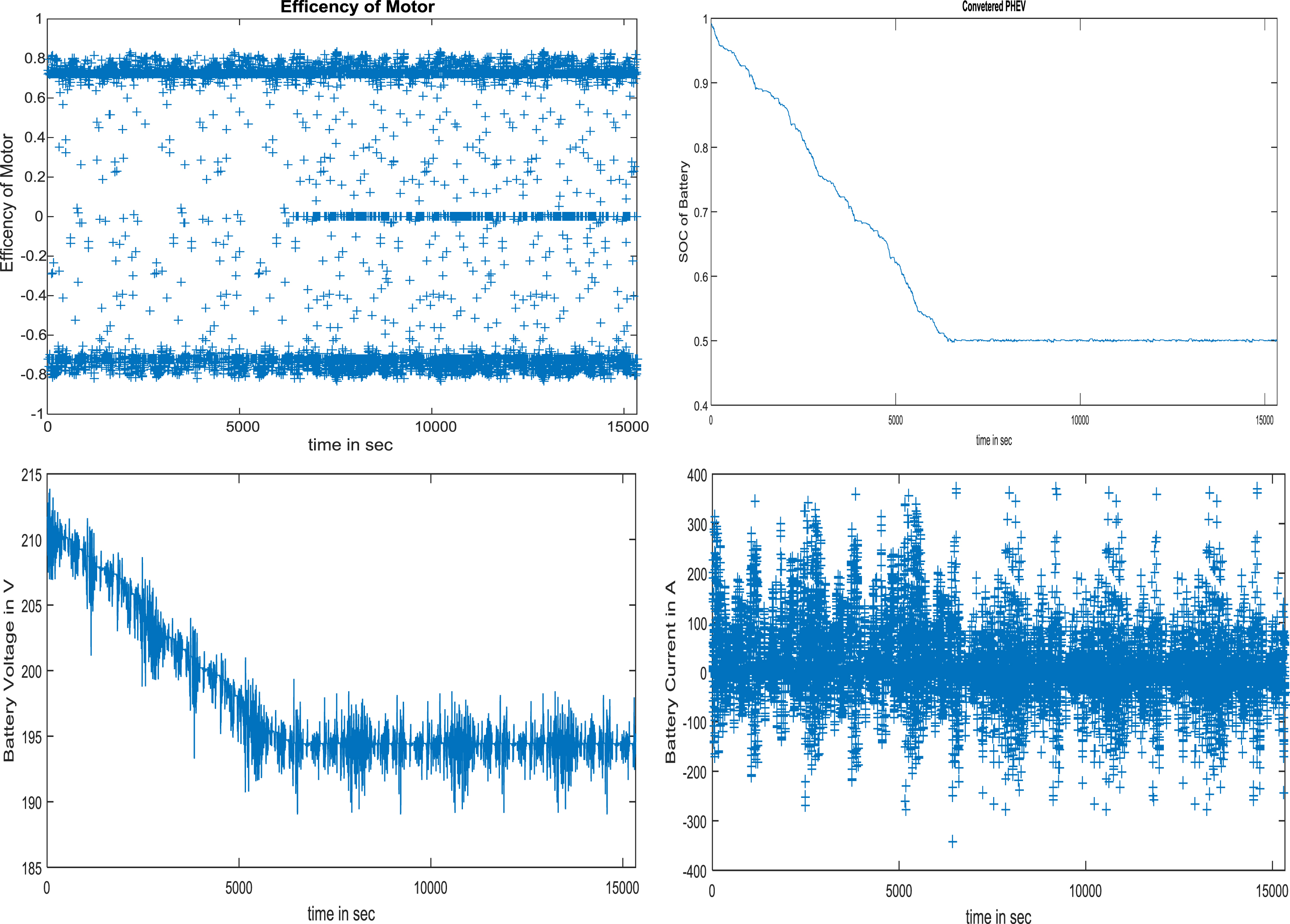
The analysis of results for CPHEV with proposed EMS and other different strategies. The sample graphical results of CPHEV with proposed RABC are shown in Figs. 7 and 8 for Indian urban driving cycle of 17.49 km repeatedly run upto100 km starting with fully charged battery (state of charge (SOC) = 1).

Results for Converted PHEV with Proposed RABC EMS. Note- Blue + indicates values of Conventional Vehicle and Red/Yellow* indicates optimized values.
Motor and Battery Parameters.
Summary of results
It can be seen from Fig. 7 that there is a significant reduction in FC, NOx, and PM with proposed RABC strategy. Also, the density of operation of IC engine has reduced. Up to 6000 sec. the electric motor is operating and hence there is no emissions and fuel consumption. The range of magnitude of FC and PM has been reduced, however, the NOx is increased but since the duration of operation of the engine is less, the average value comes less as seen from Fig. 7. It is also observed that engine is operated at highest efficiency points by operating torque at highest values to reduce specific fuel consumption.
The electric side parameters of battery and motor can be seen in Fig. 8.
It is observed that CPHEV is operating in electric mode up to 6000 sec. and hence battery discharges from 1 to 0.5 as per rule set which can be seen in Fig. 8(b). Battery voltage is also reducing during this period with continuous dynamic variations as seen in Fig. 8(c). Large battery current is drawn from the battery pack of 22.76 kWh of the battery as shown in Fig. 8(d). One of the important observation in CHPEV is regeneration mode of operation during braking and optimized mode when the engine is operating at highest torque and charges battery. Figure 8(a) shows that the motor is operating in motoring and regeneration mode. Whenever there is braking, the negative efficiency points of motor indicate operation of the motor as a generator and charging battery i.e. regeneration of power. The charging current can be seen from the negative battery current of Fig. 8(d). It can also be seen that during the latter part of driving pattern whenever the engine is operating in optimized way battery is charged through the motor. Negative motor efficiency and battery current indicate the same.
The CPHEV results obtained by application of both Indian urban and highway driving cycle with proposed RABC EMS along with other strategies are summarized in Table 3.
It is observed that the emissions and fuel consumption can be reduced significantly using electrification of the vehicle. If the distance traveled is less than 60 km per day, zero emission of the vehicle is possible if charging of vehicle is done from renewable source. If distance travel is greater than 60 km then simple rule-based strategy (electric mode is operative for SOC greater than 0.5 with exception of the suboptimal zone of speed from 65 to 95 km/hr. or else conventional mode is in operation.) gives suboptimal results as shown in the table. The fuel consumption is least in proposed RABC. Its millage increases by 2.41 times compared to conventional and 1.8 times compared to a rule-based strategy for Indian urban driving cycle i.e. it can run around 49.33 km in one liter compared to 11.36 km by conventional and 27.38 km by rule-based. There is a considerable amount of reduction in NOx and PM for both Indian urban driving cycle and Indian highway driving cycle considered for100 km run. For IUDC the NOx is reduced from 0.605 g/km to 0.4298 g/km with proposed RABC EMS strategy. The rule-based strategy gives the moderate value of 0.5318 g/km. Reduction in PM is observed to 0.0108 g/km from 0.0417 g/km of the conventional one and to 0.0176 for rule-based strategy all started with fully charged battery (SOC = 1). Similarly, reduction in NOx and PM is observed for Indian highway driving cycle with improvement in millage as seen from Table 3. It should be noted that for both Indian urban and highway driving cycle it complies BSIII emission norms as NOx and PM are within limit.
Conversion of CV to PHEV is a promising solution to comply with norms for current vehicles running on the road. Zero emission is possible for a commuter traveling distance less than 60 km per day if charged by renewable charging stations. For distance greater than 60 km, the proposed RABC EMS strategy can comply BSIII norms with improved mileage. The proposed strategy operates in an electric mode for higher values of SOC and operates with an optimized value of IC Engine when SOC falls to 0.5. It is observed that RABC EMS operates IC engine at highest possible torque so as to reduce FC, NOx and PM. The suboptimal zone identified is used as a rule for direct operation of conventional IC engine mode for a specific band of speed reduce computation time and a load of ABC optimization algorithm.
The NOx and PM reduction is observed to be 29.95% and 74.1% compared to CV with fully charged battery with proposed combine RABC EMS strategy for CPHEV tested for Indian urban driving cycle for 100 km run. Moreover, NOx and PM reduction is 38.63% and 19.18% compared to rule-based strategy.
For Indian highway driving cycle NOx and PM reduction is observed to be 27.59% and 38.57% compared to conventional one and 16.84% and 52.87% compared to a rule-based strategy for 100 km run.