
Abstract
A linear method based on local statistical parameters of the image to remove the speckles of ultrasound carotid artery medical image is presented in this article. Speckle is the main drawback of medical images and it should be removed before any further processing of images like edge detection and registration. The focus of this article is to filter the speckle efficiently and effectively even at higher density of noise. The filter is designed by keeping in mind that the local statistical parameters are important rather than global statistical parameters. The weighting factor is designed such that it is high for similar areas and thus results into more smoothing without destroying the useful information, whereas it is low at the edges and thus less smoothing will be done. The filter is applied with the help of 5×5 sliding window. The noise ranging from 0.01–0.09 of variance is unnaturally inserted in the medical images through Matlab. The efficiency calculating parameters like Signal to Noise Ratio (SNR), Quality Index (Q), Mean Square Error (MSE), Similarity Index Measure (SSIM) and Edge Preserved Index (EPI) were used to evaluate the proposed technique. The suggested method is also compared with the existing local statistical mean variance filter for the said parameters in order to analyse the performance of the filter.
Introduction
The combination of medical and engineering has opened a new era in the medical technology. There has been various research made in the domain of medical imaging, which has produced several approaches for medical diagnosis. Various imaging modality like PET, MRI, CT and Ultrasound; everyone of them has its own pros and cons. The imaging of ultrasound (US) is most commonly used [1] technique and has become an important imaging modality due to its various advantages like easily adaptable, economical, safer and portable. Due to the non-invasive and non-ionizing nature, applicability of ultrasound images in real time has drastically increased. The main drawback of ultrasound modality is, imaging of the limited body organs and difficulty in imaging the overweight patients. Besides this the skill of the technician may also affect the quality of the image. The noise present in the ultrasound images is due to the scattering process that arises when the ultrasound waves strikes the various body parts and return with different wavelength due to the difference in the impedances results into black and white spot in the images [2]. The poor picture quality reduces contrast resolution and ratio of the original signal and noise (SNR) of the image [3]. Thus it becomes difficult for the doctors to diagnose the patient disease. Therefore the aim of this paper is to design such method which would reduce the speckles as well as retain the important information in the image which would definitely help the doctors to diagnose the patient situation.
The paper is worked out as follows. A short review of similar filters i.e. local mean variance filter also abbreviated as LSMV filter is given in section 2. The proposed method of local statistical mean variance filter is presented in Section 3. Then after in section 4 and section 5 performance parameters are explained, evaluated and compared. Finally, conclusion along with future scope is described in section 6.
Materials
Various filters [4–16] have been applied to remove the speckles in different types of medical images. The other techniques to filter the noise in Frequency domain [5] were suggested for the medical images. However, when the filter is to be applied in frequency domain it is very important to fix the cut-off frequency which is decided before applying the filter. In order to fix the cut off frequency a pre-signal information is required which is impractical in real time applications. On the other side, local statistical parameters are required to deploy the spatial filters. There are two types of filters in spatial domain linear filters e.g. wiener, mean, lee and non-linear filters like median, weighted median. Spatial filters are better since these filters depend upon local statistical parameters which are calculated among the pixels within the window of the particular size.
Median filter
This filter [4], is applied by calculating the median within the kernel of specified size and replacing by the centre pixel of that window. It is non-linear filter in spatial domain. The edges are preserved but computation time and complexity increases.
Mean filter
In this filter [6, 7] the average of all the pixels within the window is calculated and it is replaced with the centre pixel. It is a linear filter in spatial domain. The image is blurred and important information is lost. Over smoothing increases with the increase in the size of the window and information near the edges is lost.
First order statistical filters
Statistical filter based on local mean and variance is first order filter. Since the statistical parameters are calculated locally, therefore they are known as statistical mean variance filters. Maximum filters in the literature make use of local parameters. Local filters as mentioned in [5–13] are adaptive filters which works by calculating local statistical parameters. The principle of these filters is that the local mean and variance is calculated for a small window which is known as kernel. If there is a homogeneous region in the image then the centre pixel is replaced by mean of the pixels within the window otherwise the pixel is kept unaltered. Loizou et al. [5] has done the performance calculation of various filters in medical images of carotid artery which were taken from ultrasound machine and concluded that the first order linear filters in spatial domain that to (LSMV) are the best.
Lee filter
This filter [8–10] was proposed by Lee JS which work on the multiplicative noise. The important information and edges are preserved by calculating the local parameters. Lee filter used non-stationary model of the image. It tries to minimize the average error in the filtered image. It works for both additive and multiplicative noise. If the variance is low, smoothing is applied in the image otherwise not. It can be described as:
where,
where, window size of M × M and p (s, t) is the centre pixel of the window whose coordinates are s and t,
The traditional wiener filter [5, 11] is based on the identical visualization in the image. It is works on the hypothesis that the quality of the noise and behaviour of the image is same in small regions. However, practically it is not true. The speckle is reduced by calculating the statistical parameters within the kernel and the whole noisy image. The smoothing is less, when the variance of the image is large locally, otherwise large and if it is less. Wiener filter is represented as:
where p (s, t) is the pixel with noise in the moving window, q (s, t) is the approximate pixel free from noise,
The values of
where
As compared to Lee filter Kuan filter [12, 13] is comparatively better. It works on the principle of minimising minimum mean square error (LLMMSE) which is calculated linearly and locally. The multiplicative noise present in US image is changed to summing type. It is given by:
where q (s, t) is the approximated pixel which is free from noise, p (s, t) is the noisy pixel at coordinates s, t.
where
where C
U
is the noise variation coefficient. ENL is the effective number of looks which controls the quantity of smoothing which is to be applied in the image. The ENL is calculated from a uniform region R by:
where σ
R
and
It is noticed while doing literature survey [5] that if the weighting coefficient r (s, t) is varied, then with varying characteristics numerous designs can be presented of local statistical mean variance filter. These weighting factors are derived [5] as:
Though there is a significant advancement in improving the medical image quality in the previous decades, only least amount of progress is done towards removing or minimizing the speckles from the images. A few researchers as stated above [4–13], has tried to reduce the speckles very effectively but they fail at higher level of noise. As the level of noise goes on increasing the quality of the despeckled image degrades. Thus it can be stated very truly that the existing filters fails to remove the speckle at high noise variance. Filters in spatial domain which are based on the local statistical parameters like LSMV tend to reduce the speckle considerably without much loss of useful information in the image. The LSMV filters are designed in such a way that they work for both additive and multiplicative noise. These LSMV filters are easily implemented as they work on linear calculation of local statistical parameters and at the same time more effective in removing speckles. Thus the main focus would be to suggest such linear filter which preserves the edges and maintain the picture quality even at high density of noise.
The speckle in US images can be treated in a similar way as laser speckle. The general model [2] of the ultrasound image is represented as:
where, b, c, ζ and ν stand for actual image free from noise, the visualized image with noise, the additive and the multiplicative noise respectively, whereas m and n represents the spatial position or coordinates of the image respectively.
In ultrasound images the additive noise is negligible in comparison to the productive or multiplicative noise [2], the effect of additive noise in the image is less than that of multiplicative noise. Therefore, the additive noise can be neglected and then c (s, t) in Equation (14) may be written as:
The above image model is declared before the basic processing is applied by the conventional US scanner as shown in Fig. 1 [17] (example nonlinear amplification, gain stages through logarithmic compression). When the log compression is applied the productive noise is converted into summing type and it follows the power spectral density function of Rayleigh noise [3]. In Fig. 1, variable gain stage is the block where filtering should be applied.

Block diagram of typical ultrasound scanner.
After applying logarithmic compression the image model which contains multiplicative noise as in Equation (15) is converted into additive noise model as:
where the term ln [c (s, t)] which is the visualized pixel on the ultrasound image, after logarithmic compression can be represented by p (s, t) and the terms ln [b (s, t)], ln [v (s, t)] which are pixel free from noise and noise component when logarithmic compression is applied can be represented as q (s, t) and vln (s, t) for the remaining of the paper.
The local statistical mean variance filter can be given as:
where, q (s, t) is the pixel free from noise,
where

Flow diagram of the Proposed method.
Since the weighting coefficient r (s, t) for the proposed LSMV filter is calculated for each 5×5 moving window. Therefore analysis is done for the same.
(1) If the centre pixel is on the edge, and
Then
And therefore no smoothing will be done.
(2) If there is no noise within the window then,
And therefore no smoothing will be done.
(3) If the centre pixel in the moving window is on the edge and,
Then
And therefore less smoothing will be done.
(4) If the centre pixel is noisy pixel then
Then
And therefore less smoothing will be done.
Results
The existing and the proposed filter were coded and simulated. The mean of the different layers i.e lumen, adventia and tissue for original images were calculated as 1.9564, 34.6151 and 116.1063 while variance for the same layers were 10.0408, 242.1338, 613.3940 respectively. Whereas after applying the existing and the proposed filters, mean for the same layers were calculated and shown in Table 1 while standard deviation is also calculated and shown in the same table. Increasing the mean value and decreasing the standard deviation as compared to the other existing filters indicates that the proposed filter has removed the noise very efficiently and effectively. Thus the weighting coefficient in the suggested filter works in such a way that it removes the speckles and preserves the edges and useful information. Filtering is done by adding speckle in the ultrasound images using Matlab function in the coding. The analysis of different parameters is done to see the working of the proposed filter method.
Average and standard deviation calculated for various filters
Average and standard deviation calculated for various filters
The quality comparison is done by calculating the error between two images. The two images are original and filtered image. MSE is given by:
It is used to determine the amount of distortion appearing in the image. It is a combination [19] of three parameters viz correlation, luminance and distortion correspondingly. It is given by eq. as:
where
It is calculated as:
where, L is equal to 255 for gray scale image. Low PSNR means poor quality of filtered image.
It is given by:
where, R1 = (T1D) 2, R2 = (T2D) 2 with T1 = 0.01 and T2 = 0.03. D for the gray scale image is 255. The similarity is calculated between the filtered and original images [20]. The mean SSIM is formulated as:
where, M×N is the total rows and columns of the image.
It is given by [18]:
It should be approximately to zero for better filter.
The relation between the neighboring pixels in the image is calculated by correlation of coefficient. It should be 1 for highly correlated and zero for weak relation. The correlation coefficient is given by:
where S and T represents the adjacent pixels in all directions in the filtered image and N represents the total pixels in the image.
Edge preserving index [21] is the measurement of edges that are retained after applying the filter in the image. The EPI is calculated as:
where, ∇2I p and ∇2I q are the Laplacian operator of 3×3 window size, which is applied in both the images unfiltered and filtered respectively. Whereas ∇2I p and ∇2I q are the mean value within the window.
The speckle index measure the amount of noise existing in the filtered image. It is expressed as
where σ and
Different evaluating parameters for calculation of the performance of the proposed method
Various performance measuring parameters using various filters at 0.06 noise variance
The calculated parameter values in the previous tables and figures show the proposed method has worked very effectively over the speckled medical images without much loss of useful information. The analysis of the filter is done by varying the intensity of the speckle from 0.01 to 0.09 variance level with no mean. About 20 sample data was taken to evaluate the performance of the filter. The B-mode images of carotid artery were captured from Aloka Prosound Ultra-6 scanner operating frequency of 7.6 MHz. The simulation was done in MATLAB based software of 7.9.0(R2009b) version and the processor was Intel (R) core(TM) 2 Duo CPU T5870 whose working frequency is 2.00 GHz and has 3 GB of RAM. Table 2 shows the different evaluating parameters for the suggested method at different level of noise. Figure 3 shows the resultant images after applying different filters which indicates that the image of Lee filter is highly degraded. The comparison based on the evaluating parameters is done in Fig. 4 which is explained in section-3. Figure 4(a) shows that as the noise variance increases from 0.01 to 0.09, the MSE for the suggested method is better than other existing methods. MSE is increasing but in small quantity, whereas in Fig. 4(b) the PSNR is decreasing, but in small variation as compared to other methods. Figure 4(c) and 4(d) represents the Q and MSSIM which is high for the proposed method as compared to other methods. Figure 4(f) represents the EPI which is high than other methods even though the noise variance level has increased.
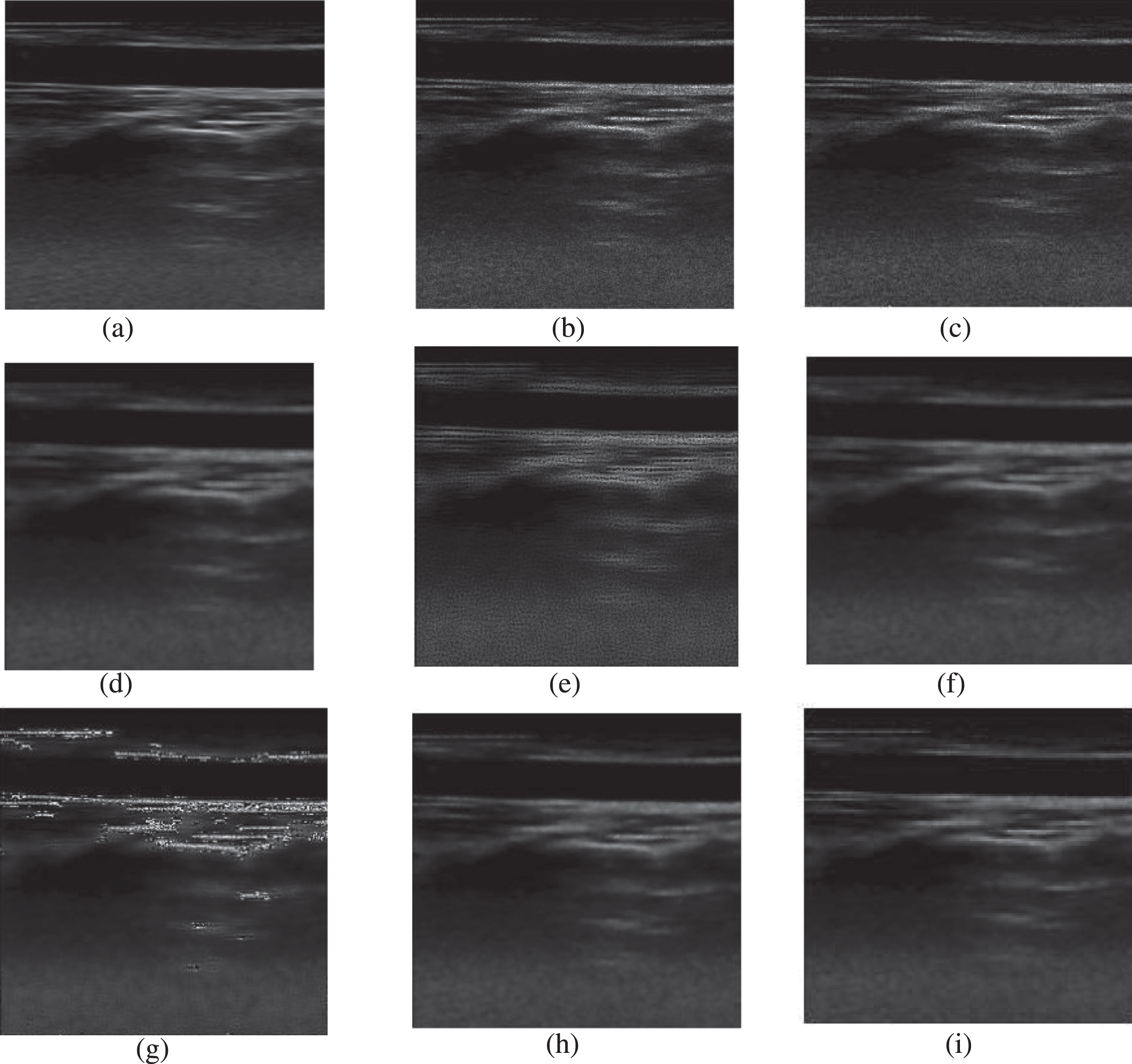
(a) Original image (b) Speckled image, De-speckled images using (c) LSMV1 (d) LSMV2 (e) LSMV3 (f) Wiener (g) Lee (h) Kuan and (i) Suggested filter at noise variance σ2= 0.06.
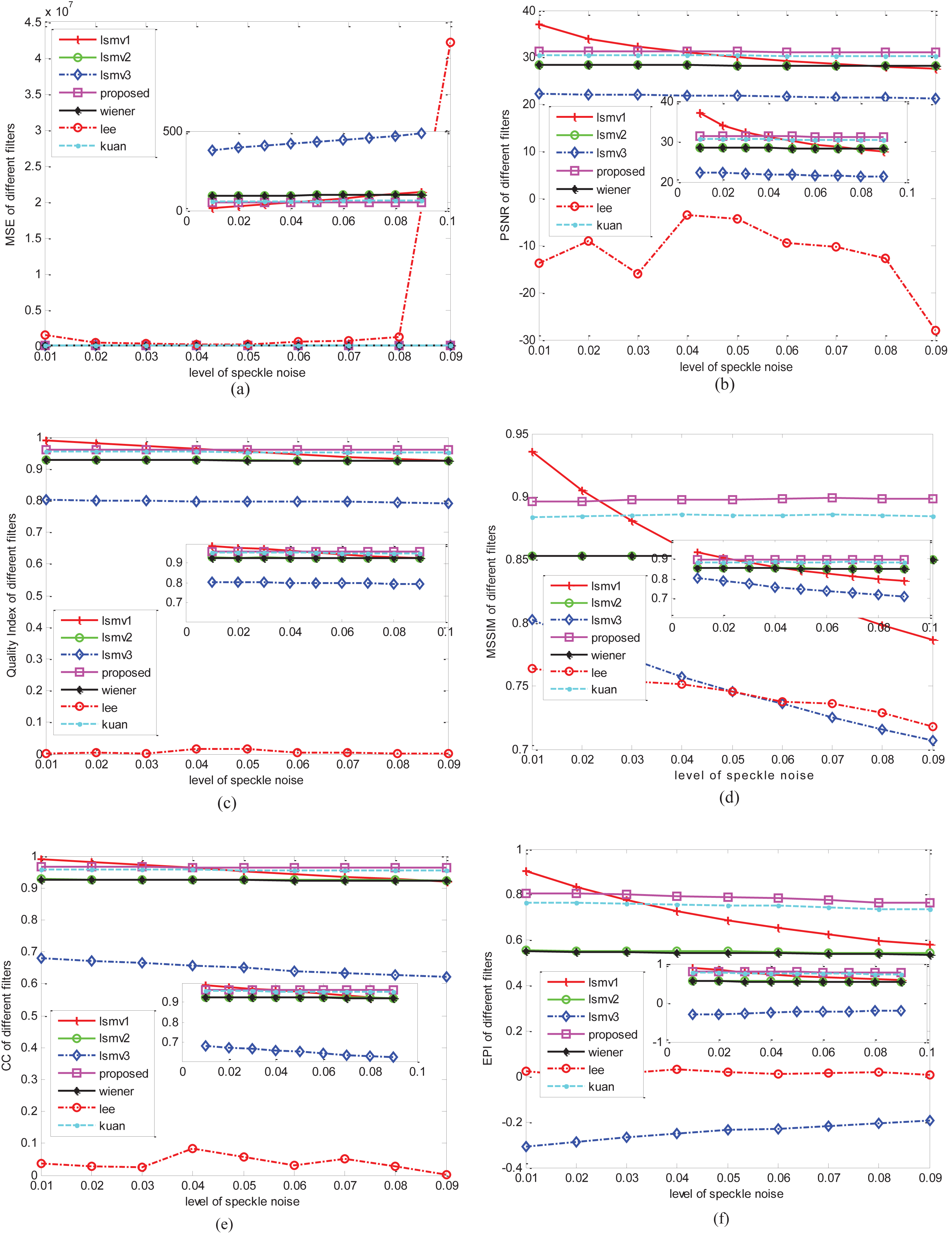
Assessment of various filters based on the evaluating parameters like (a) MSE (b) PSNR (c) Quality index (d) MSSIM, (e) CC (f) EPI. (Inside figure is the zoomed version along y-axis).
The ultrasound imaging is the most common technique which is popularly used in medical treatment and telemedicine. There are various benefits which has made frequently used technique in the almost every hospital in the world. Speckle reduction can be considered as the first step of advanced medical image processing. The filtering is a pre-processing step of any medical image processing and may be further used for image segmentation or image registration.
The speckle should necessarily be removed for enhancement of the image and better visualisation. The filter should be such that the speckle is removed efficiently and at the same time without much loss of information. Although there exist many filters but most of the filters have some or the other limitations. Thus a great effort towards this approach has been initiated to minimise the limitation as far as possible and at the same time to improve the quality of the medical image. In this approach a simple and linear filter is proposed. This filter calculates the local parameters like mean and variance and has a varying weighting factor which is adjusted according to the level of noise. The filter is applied in US carotid artery images and evaluated on the basis of performance parameters and found to be a promising tool which can be used in real time application like ultra sonography.
Disclosure
The authors state no conflict of interest and have nothing to disclose. The research was not supported by any financial help. The research contribution was equally made by all the authors.
Footnotes
Acknowledgments
The data set of human body for the simulation was provided by Government Medical College, Gwalior, Madhya Pradesh, India with the permission of doctor. The information is solely the responsibility of the authors to be kept confidential and nothing to do with the institute or doctor. The authors are obliged to the anonymous reviewers for their valuable time given to this paper.