
Abstract
This paper consider the design approach of guaranteed cost control for discrete uncertain networked systems with time delay. A novel sliding mode manifold that can compensate time delay has been designed by introducing a discrete compensator. Then, a guaranteed cost controller is designed to make the sliding mode manifold stable. Finally, a numerical example is given to demonstrate the effectiveness of the proposed method.
Introduction
Feed back control systems in which the control loops are closed through a real time network are called networked control systems (NCSs) [1–3]. The defining feature of the NCSs is that information is exchanged by using a network. Many attractive advantages (for example high systems testability and resource utilization, as well as low requirement to weigh, space, power and wiring) of introducing a communication network into a control system motivate the research on NCSs. NCSs are now widely used in process control, remote control, telemanipulation, robots etc [4–6]. Since NCSs operate over a network, data transfers between the controller and the remote systems, e.g. sensors and actuators in a distributed control system, will induce network delay in addition to the controller processing delay. There are essentially three kinds of delays: (1) communication delay between the sensor and the controller; (2) computational delay in the controller; (3) communication delay between the controller and the actuator. In recent years, some methodologies have been formulated based on several types of network behaviors and configurations in conjunction with different ways to treat the delay problem [7–13]. With a new Lyapunov functional, a new robust H∞ stabilization criterion for NCSs with time-varying network-induced delay and data packet dropout is given in [14]. Based on the LMIs approach, a sufficient condition is obtained by using the information of both the lower and upper bounds of the time-varying network-induced delay. Based on Lyapunov stability theory, combined with LMIs approach, Yan give a new delay-dependent stability criteria for the systems in terms of LMIs in [15]. And they analyze the delay-dependent asymptotic stability and obtain maximum allowable delay bound of NCSs with uncertainties and multiple time delays. Based on a new time delay model proposed recently which contains multiple successive delay components in the state [16].
The variable structure control approach, based on using of discontinuous control laws, is known to be an efficient alternative way to tackle many challenging problems of robust stabilization [17, 18]. For instance, an appropriate sliding mode strategy can achieve stabilization by “dominating” nonlinear terms and additive disturbances, provided some appropriate “matching conditions” hold. However, the combination of delay phenomenon with relay actuators makes the situation much more complex: designing a variable structure controller without taking delays into account may lead to unstable or chaotic behaviors or, at least, results in highly chattering behaviors. In [19], Chen considers the problem of sliding mode control for discrete-time multi-input multi-output systems. Fuzzy sliding mode controller design for uncertain time-delayed system has been studied in [20, 21].
Recently, the problems of variable structure control for uncertain discrete-time systems with delays have been studied [22, 23]. In [24], Zhang considers the quasi-sliding mode variable structure control for discrete linear constant system with time delay. Sliding mode control for time-delay discrete systems with unmatched uncertainty and multi-input discrete systems has been present in [25, 26]. In [27], Shyu considered the design method of large-scale time-delay systems with dead-zone input via variable structure control. But on the variable structure control for NCSs with delay, a few results have been present. By constructing a sliding mode manifold that can compensates time delays, Fang obtain a novel method for the stabilization of a class of NCSs with communication delay. Then a variable structure controller is designed by LMIs approach [28]. It is worth noting that the considered systems do not include any uncertainty, and the optimization problem for the guaranteed cost is not investigated.
To the best of the authors’ knowledge, the variable structure guaranteed cost control and optimization for discrete NCSs have not yet been investigated. Motivated by the above discussion, we introduce a new technology to design a variable structure guaranteed controller which makes the discrete uncertain NCSs with delay stable. Based on the Lyapunov stability theorem, a sliding mode manifold that can compensate time delay has been designed. Further, by using LMIs approach, we design the guaranteed cost controller, which can be easily solved with the use of Matlab LMI toolbox. One contribution of this paper is that a novel scheme, designing the novel sliding mode manifold with a discrete compensator, is developed to compensate time delay. The other contribution lies in the fact that a variable structure guaranteed cost controller is designed. Also, the guaranteed cost of the considered system can be obtained by solving the corresponding linear matrix inequality.
The remainder of this paper is organized as follows. Section 2 describes the discrete NCSs to be studied and formulates the variable structure guaranteed cost control problem. Section 3 gives the main contributions of this paper and presents the design scheme of the controller. Section 4 gives a numerical example, the model of which falls into our class of discrete uncertain NCSs (2), to demonstrate the effectiveness of the theoretical results. Finally, concluding remarks are proposed in Section 5.
Notation: For symmetric matrices X and Y, the notation X ≤ Y (respectively, X < Y) means that X - Y is negative semidefinite (respectively, negative definite). The superscript “T” stands for matrix transposition. The symmetric terms in a symmetric matrix are denoted by*. The term I is an identity matrix of compatible dimension. Matrices, if not explicitly stated, are assumed to have compatible dimensions. The term R n denotes the n-dimensional Euclidean space. The term Rm×n denotes the set of all the real m × n matrices. The term diag {⋯} denotes the block-diagonal matrix. The term || · || stands for the Euclidean vector norm or the induced matrix two-norm as appropriate.
Problem formulation
In this paper, a class of real MIMO discrete NCSs with many independent sensors and actuators are considered. Throughout this paper, we suppose that all the systems’ states are available for a state feedback control. The sensor is clock-driven; the controller and actuator are event-driven. In the presence of the control network, data transfers between the controller and the remote systems. Therefore there exist the communication delay between the sensor and the controller and computational delay in the controller. Now we consider the following MIMO discrete NCSs with constant state time delay and networked induced time delay:
Where x (k) ∈ R n is the state vector, u (k) ∈ R m is the control input, d, τ are constants representing the state delay and the network-induced delay of NCSs, h = max {d, τ}. φ (k) is real-valued initial function on [- h, 0]. A, A d and B are known real constant matrices with compatible dimensions.
In practice, it is very difficult to obtain an exact mathematical model due to environmental noise, all kinds of uncertainties or slowly varying performances, some uncertainties are always inevitably presented in NCSs. Therefore, without loss of generality, consider the following NCSs with structure uncertainties, state delay and network-induced delay:
The resulting discrete uncertain NCSs with delay is obtained
Now the following two well-known lemmas are introduced which is needed in the proofs of main results in this paper.
In this section, a new sliding mode manifold is presented, and a variable structure controller is designed to make the systems states arrive on the sliding mode manifold in finite time. Then, a guaranteed cost controller and a scalar cost are obtained to satisfy the following two conditions:
the closed-loop systems is asymptotically stable; the cost functional less than the scalar cost.
The design of variable structure controller
Now a new sliding mode manifold and a variable structure controller are presented in the following results.
Construct the following sliding mode manifold:
Then the arriving condition is given by [23]
In order to obtain the equivalent controller, the nominal systems of (3) is given
With the nominal systems (6), the forward difference of s (k) is obtained
If Δs (k) = s (k + 1) - s (k) =0, by the above equation, one can obtain the equivalent controller
By the controller (8), the above equation is transformed to
From the above inequality, one can know that the arriving condition (5) is satisfied. Then the systems states will arrive on the sliding mode manifold (4) in finite time.
Now a sufficient condition for existence of the variable structure guaranteed cost controller for the sliding mode equation is presented in the following results.
By the equivalent controller (7) and systems Equation (2), the sliding mode equation is obtained
where
Define the following cost functional:
where
a stable sliding mode manifold is given by
The controller u
eq
(k) = - Kx (k) is the guaranteed cost control of the sliding mode Equation (9) with the following guaranteed cost
Obviously, V (k) >0 for all x (k) ≠0, and the forward difference of V (k) along the trajectories of the sliding mode Equation (9) is obtained
According to the Equation (12) and the condition (11), one can obtain
By the condition (11) and the inequality (12), one can obtain again
therefore
If k→ ∞, then x (k)→ ∞ and V (∞) =0.
The inequality (13) is
Therefore one can obtain the guaranteed cost
ΔV (k) <0, by the Lyapunov stability theorem, one can know that the sliding mode Equation (9) is asymptotically. V (k + 1) - V (k) < - x
T
(k) Qx (k), by some technical treatment, one can obtain the guaranteed cost.
a stable sliding mode manifold is given by
The controller u
eq
(k) = - Kx (k) is the guaranteed cost control of the sliding mode Equation (9) with the following guaranteed cost
By the lemma1, the above inequality is equivalent to
The above inequality can be written as
By the lemma 2, the above inequality is equivalent to
Pre-and Post-multiplying the matrix inequality (15) by
One can obtain
By the Lemma 1, one can obtain that the above inequality is equivalent to
By giving some transformations
the sliding mode manifold (4) is not appropriate, and the sliding mode compensator Γ (k) will not be effective to deal with the network-induced delay. the variable structure controller (8) with time varying delay will not be feasible. with the time varying delay, the guaranteed cost J* will not be conveniently obtained.
In this section, a numerical example is presented to show the effectiveness of variable structure guaranteed cost control method for the discrete uncertain NCSs with time delay, consider the NCSs (3)
Solving the LMIs (14), one can obtain that
Give the following initial conditions
The gain matrix K of the stabilizing controller u
eq
(k) and the guaranteed cost J* are obtained
The simulation results are shown in Figs. 1 and 2 based on the above parameters.
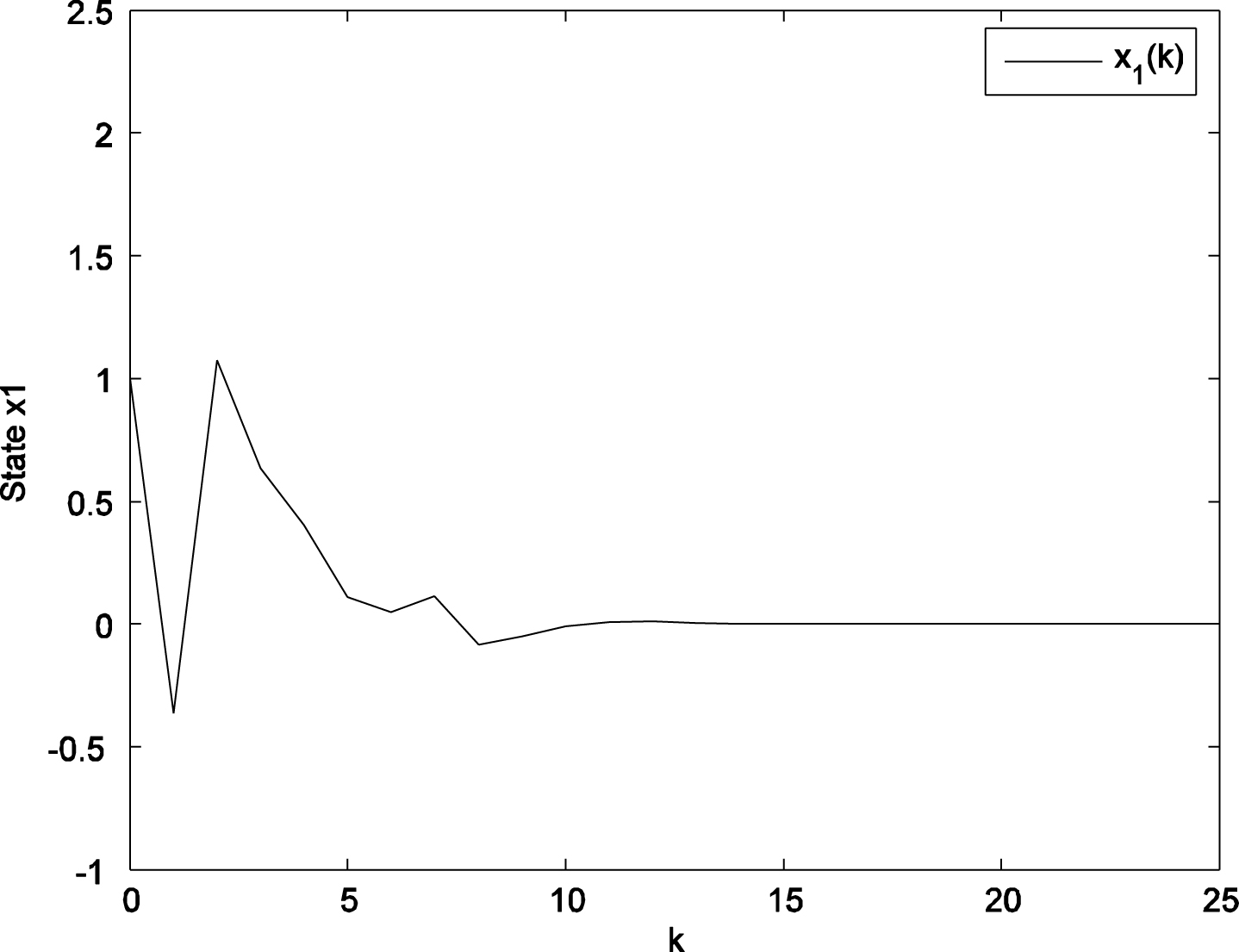
State x1 (k) response of the NCSs.
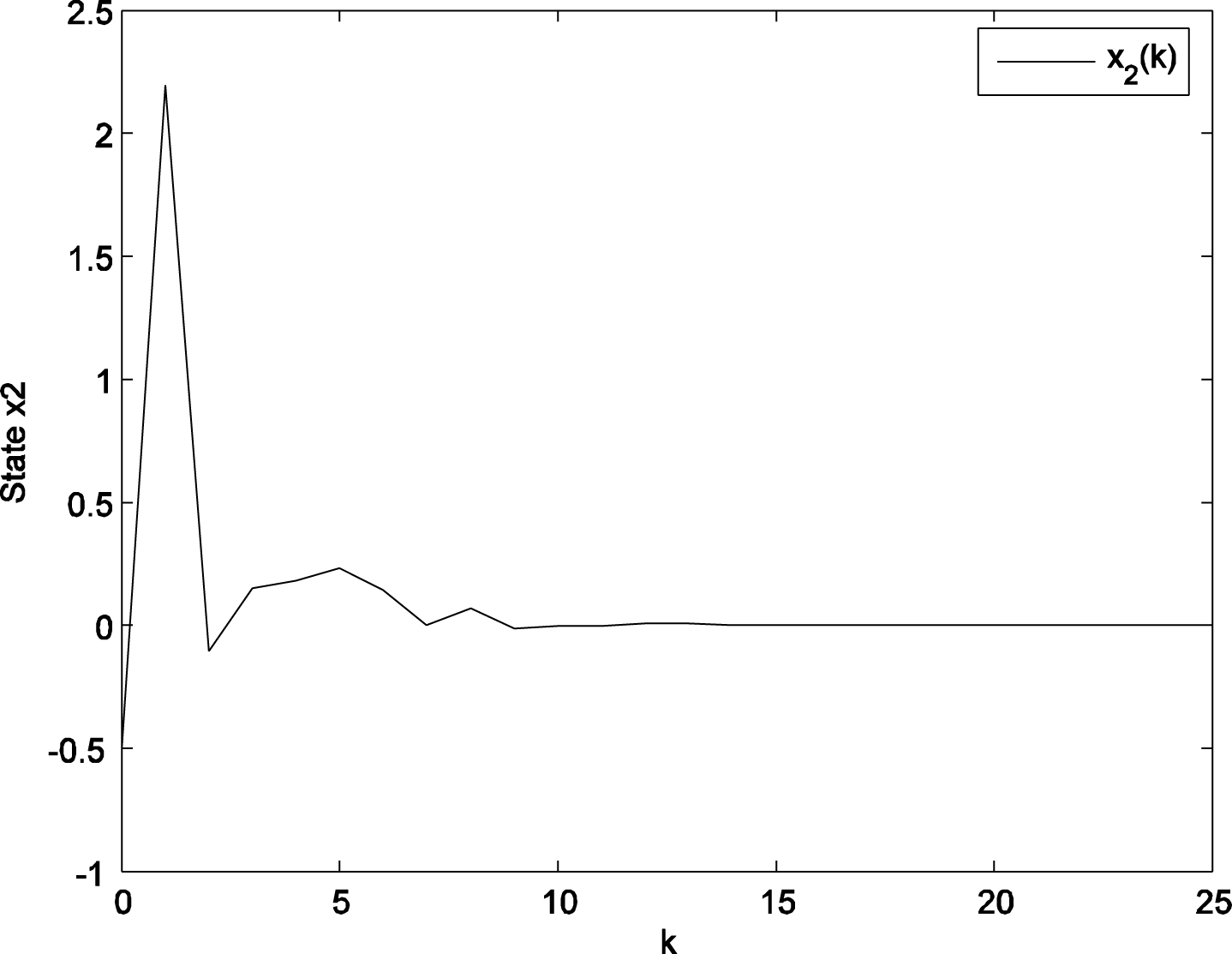
State x2 (k) response of the NCSs.
From the Figs. 1 and 2, one can see that the uncertain NCSs (3) with controller (8) are indeed well stabilized.
In this paper, we have presented a new method to stabilize the discrete uncertain NCSs with delay. Based on the Lyapunov stability theory, and with the LMIs approach, a sliding mode manifold is designed. Then in terms of LMIs, a sufficient condition is expressed to design the variable structure guaranteed cost controller. A numerical example is provided to demonstrate the effectiveness of the proposed approach.
Footnotes
Acknowledgments
This work was supported by National Nature Science Foundation under Project (61073065); Henan Province Science and Technology Key Project (172102210162, 182102210204); The Education Department of Henan Province Key Foundation under Grant (18B110001).