
Abstract
Automatic Voltage Regulators (AVRs) are widely used to regulate the system voltage. For satisfactory performance of AVR system, optimal design of the Proportional Integral Derivative (PID) controllers is essential. Design tasks of controllers are multiple objective problems since the controller has to satisfy performance measures. The present paper reports the performance study of PID controller with multi-objective Non Dominated Shorting Genetic Algorithm-II (NSGA-II). The design objectives are to enhance the controller performance while minimizing integral error criteria, settling time and maximum overshoot of terminal voltage. Initially a simple AVR system has been considered for checking the superiority of the proposed multi-objective approach. Comparative analysis has been carried out with recently reported techniques. Additionally, the study is extended to an autonomous power system with synchronous and diesel generators. Finally, robustness analysis is also reported by varying the time constant of generator, exciter, amplifier and sensor.
Introduction
Stability of the voltage level in electrical power system is also identified to be the preliminary control constraint [1]. Maintaining constant voltage is critical as all the equipments connected through the power network will be designed for certain voltage rating. Any violation in the operating voltage level affects the performance and life time of the equipment. Other reason to study voltage control is due to the fact that line losses depend on real and reactive power flow and this reactive power flow depends on terminal voltage (Vt) of the network [2]. To facilitate these mechanism of these controls, Automatic Voltage Regulator (AVR) is adopted with generating units [3]. AVR gains control on Vt by varying the generator excitation voltage. AVR control mechanism is basically a closed loop system which is being compensated with a PID controller which controls Vt to the required value. In view of wide operating ranges, simplicity and high performance PID controllers are been in usage in the instrumentation and process control applications [4–6]. Proportional, integrating and derivative gains are the three individual control factors of a fundamental PIDcontrol.
Numerous approaches have been reported in the literature to tune these control factors. Traditionally, Ziegler–Nichols method is adopted to compute the control factors of a PID Controller [7, 8]. Recently, various intelligence techniques including neural networks, fuzzy logic, Adaptive neuro-fuzzy systems and several optimization techniques were reported to tune the PID controller factors [7–9]. Linear-quadratic regulator (LQR) technique is also adopted to design an optimal controller for second order systems [10]. From the comprehensive literature survey it is observed that, modern heuristic optimization techniques have been also applied for optimal designing of the AVR systems with various traditional and modified single objective functions. Meanwhile, several authors reported the same with multiple objective functions. However, in case of these multi-objective studies, several single objective functions have been combined by adopting suitable weights. Nevertheless, in practice identification of these weights will be a challenging aspect and leads scope of the element error or brings the down the actual performance. Additionally, the final solution obtained may be subjected to an inconsistent behavior thus leading to demand of optimization techniques for selection of change in weights.
System modeling and proportional integral derivative (PID) controller design
Various transfer functions and the ranges of their control parameters of PID based AVR system shown in Fig. 1 have been tabulated in Table 1 [13].
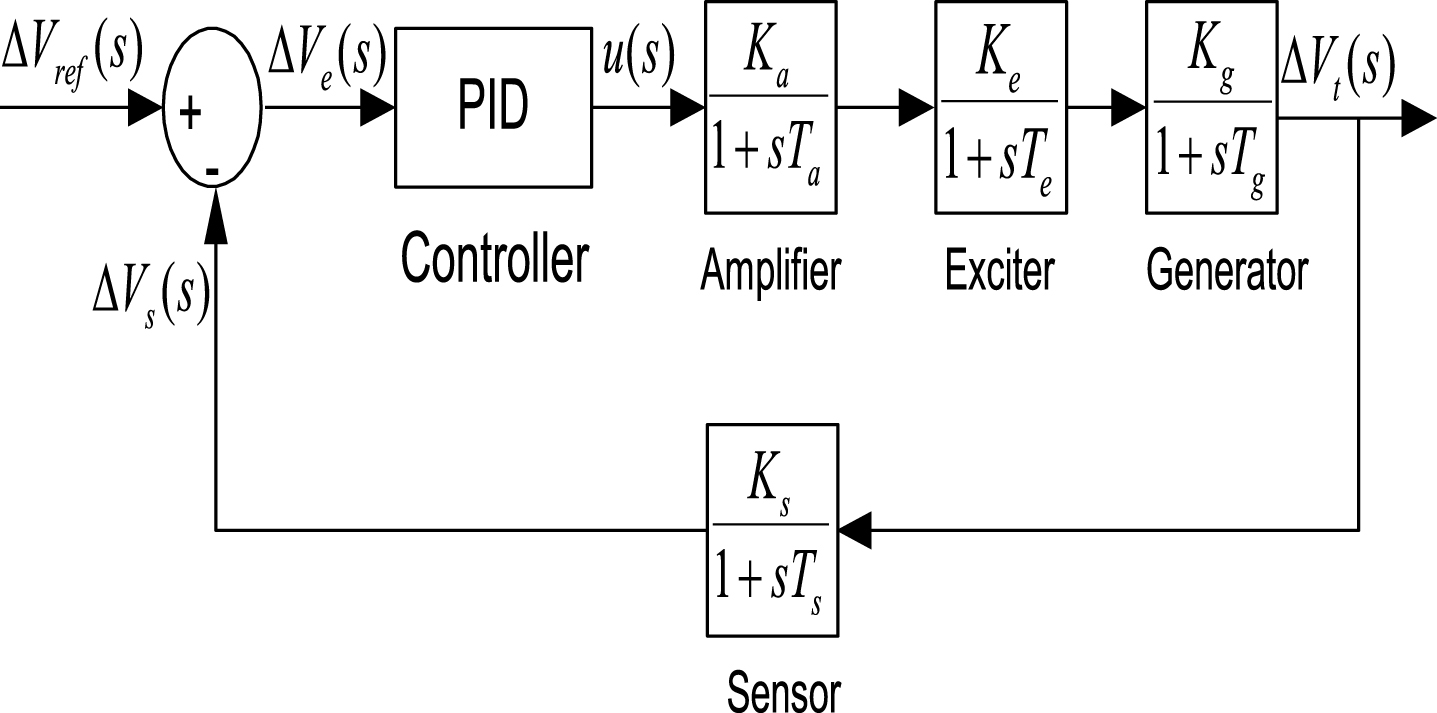
Transfer function of AVR system with PID controller.
Transfer function of individual blocks and the limits of the parameters
The values of proportional gain (Kp), integral gain (Ki) and derivative gain (Kd) can be computed through the heuristic optimization techniques to minimize the objective function values. There are different performance criteria that are traditionally used in the system design, one among them is Integral of Time-squared Error (ITSE). Improved performance of a system is attributable to objective functions ITSE, Ts, and Mos which often conflicts among them. Hence, the same may be overcome by using a suitable multi-objective technique. In the present work, multi-objective NSGA-II technique has been adopted to generate Pareto solutions and to compute optimal values of Kp, Ki and Kd
Formulation of objective function J is presented below.
The transfer function of Fig. 1 is as follows.
In the above equations, V ref is reference voltage, V (t) is terminal voltage, t sim is simulation time, TS and MOS are the settling time and maximum overshoots in the terminal voltage response respectively.
Authors have reported the implementation details of multi objective NSGA-II in [14]. The basics of the same are also explicitly discussed and reported in [15, 16]. The terminal voltage response of multi objective NSGA-II in comparison to several techniques reported in literature are presented in Fig. 2. The optimal values of Kp, Ki and Kd are 0.7769, 0.7984, and 0.3615 respectively.

Terminal Voltage response of AVR with different approaches.
The APS refers to a system which is self sufficient, thus can supply any extra load that is in demand during peak hours or during any contingency. A standard APS model of a typical Diesel Engine Generator (DEG) comprises of a typical speed governor, AVR and PID controller [10–18] is considered in the present work and is presented in Fig. 3.
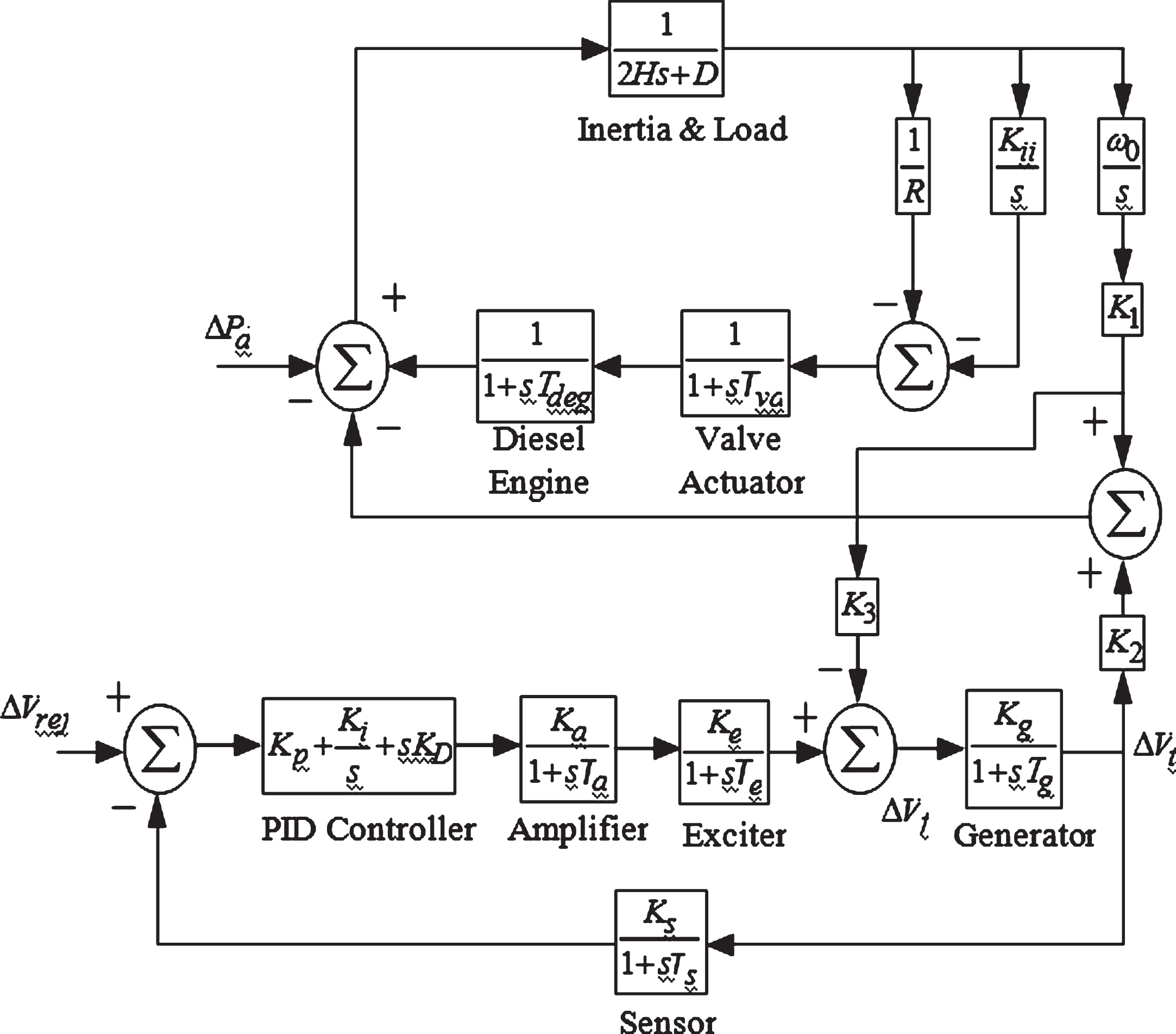
Block diagram of the studied autonomous power system.
The blocks shown in Fig. 3 represent the standard mechanical model of a DEG with a speed governor. DEG supplies power when there is a mismatch in generation and demand. The same causes the rotor to accelerate or de-accelerate. The acceleration/de-acceleration is sensed by the inertia and load block and an error signal, which is the function of torque, is generated. The integral controller comes into play and it changes the valve position proportional to the change in power demand. The integral controller eliminates the steady state frequency error. Various transfer functions and the ranges of their control parameters of PID based autonomous power system are presented in Table 1 [13].
To illustrate the performance of proposed design, initially the controller parameters are optimized employing a single objective optimization technique using single objectives. Minimization of ITSE given by Equation (3) and ITAE value given by Equation (6) are considered as single objectives. Differential Evolution (DE) is identified to optimize the controller parameters. In the present paper the control parameters of DE are adopted from [20–22].
Proposed approach is employed to generate the Pareto solutions to achieve optimal values of various gains. The obtained gains have been used to minimize the objective function values. These objective functions are rewritten for clarity as below:
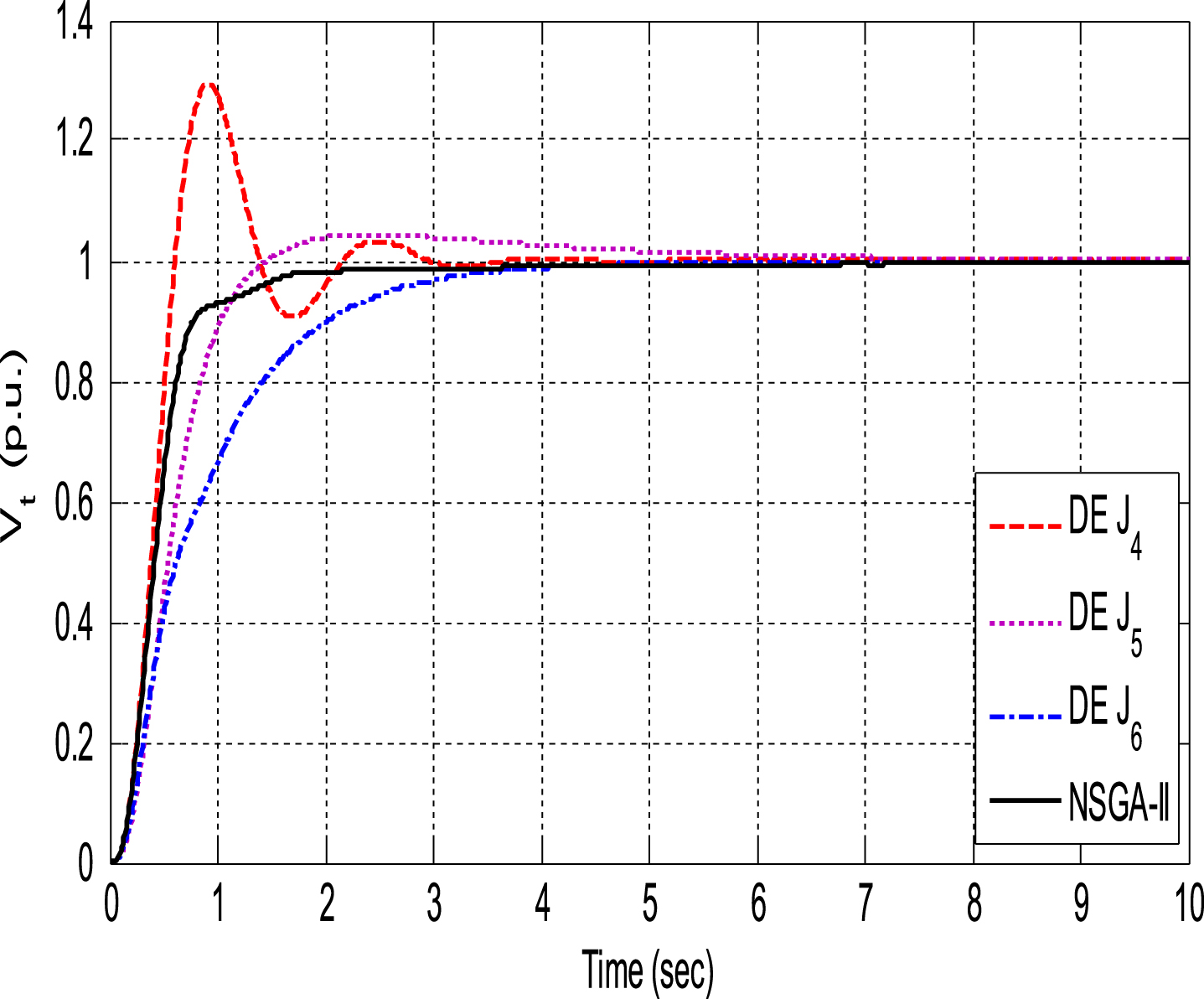
Figure 4 presents the step response of change in the V(t) for APS using single objective DE for J4, J5, J6 and proposed approach. It is clear from Fig. 4 that the proposed approach out performs the single objective approaches in terms of Ts and Mos. Later, robustness analysis of APS is also performed by changing the time constant of amplifier as shown in Fig. 5.
Objective functions with techniques.
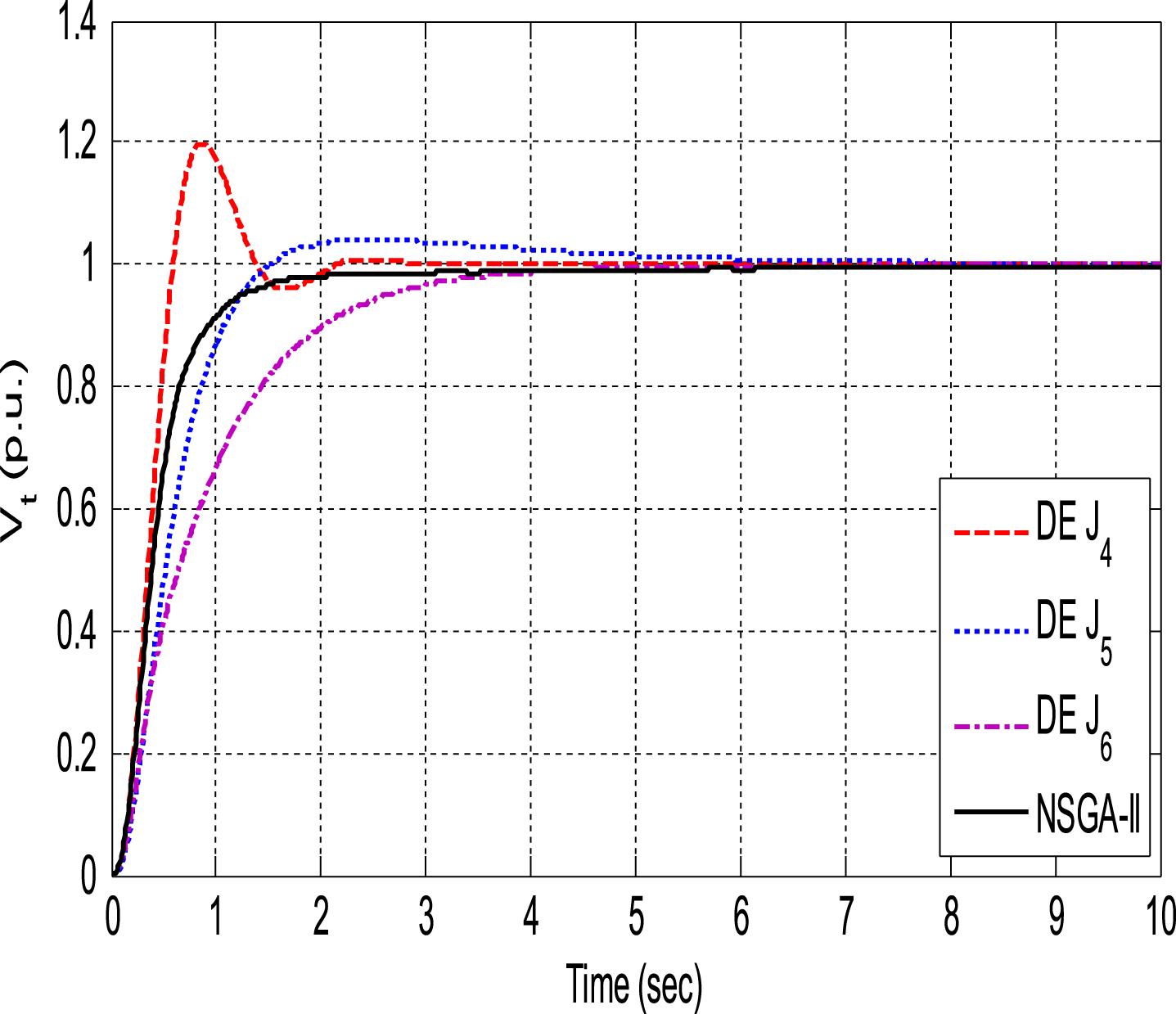
Voltage change curves for – 50% changes in Ta.
Objective function values of various evolutionary algorithms
In this study, a multi-objective NSGA-II has been presented for optimal design of a PID controller in the AVR system for improving the step response of V(t). Minimization of an integral based error criteria, settling time and maximum overshoot in terminal voltage response for a unit step input are formulated as multiple objectives and NSGA-II is employed to search the optimal PID controller parameters. The optimized step response of terminal voltage using the NSGA-II method is improved compared to some recently proposed single objective optimization approaches such as ABC, DE, PSO and MOL. Robustness analysis is performed to show the effectiveness of designed controllers. The proposed approach is also implemented to an APS and the superiority of proposed multi-objective NSGA-II approach over single objective DE approaches is demonstrated.