
Abstract
The purpose of this study is to integrate fuzzy sliding mode control (FSMC) into automatic landing system (ALS) to enhance aircraft safety during landing. FSMC can provide compensation signal to PID controller. The adaptive weight particle swarm optimization (AWPSO) and grey-based particle swarm optimization (GPSO) are applied to tune the matrix of controller parameters of the sliding surface. Fuzzy rules are applied to sliding mode controller to find the gain of the differential sliding function, sliding condition can be satisfied and stable control system can be achieved. PID controller is the main controller of the aircraft and it is also used for the FSMC controller in learning process. In this study, the proposed intelligent system can improve the ALS to against the wind disturbance and control aircraft landing in severe condition. Stability analysis is provided in the controller design by the use of Lyapunov theory.
Introduction
Conventional automatic landing systems (ALS) work for a predefined flight envelope. If the flight conditions are outside the envelope, the ALS often cannot be used. A statistical summary of commercial jet airplane fatal accident survey [1] from 1950 to 2014 showed that weather related cases to total accidents was 12%. Most of accidents and fatalities by phase of flight are in the landing phase. From statistical summary mentioned above, it is especially important to control aircraft safety and to pay attention to the weather conditions in final approach landing phase. Thus improved ALS for aircraft to be able to operate in wind-disturbance environment is in demand. This study proposes an intelligent ALS that can reduce pilot work load and control aircraft landing in disturbance condition. Recently, many engineering applications have applied intelligent theories in control system design. A considerable number of studies have been conducted on intelligent systems, such as neural networks, fuzzy systems, genetic algorithms, and optimization schemes etc. These research results have been brought to public attention by many technical reports. Flight controller’s environmental adaptive capability is one of them [2–9]. In here, intelligent theories are applied to the ALS controller design.
Sliding mode control (SMC) [10–12] has been applied to many robust control systems with external disturbance. The advantages of SMC are invariant to disturbances, insensitive to variations, good transient performance, and fast response. There are two parts in SMC controller design. The first one is switching controller. It drives system states to the sliding surface. The second one is the equivalent controller. It makes system states converge to zero along the sliding surface. Some of them apply the fuzzy concept into the structure of SMC which is known as fuzzy-SMC (FSMC). The main property of fuzzy system is its fuzzy reasoning with expert knowledge. FSMC has the advantages of neural network learning ability and human like fuzzy inference. Various FSMC approaches have been proposed in the literatures [12–17]. The approach proposed in [12] is implemented in this study.
In 1995, Kennedy and Eberhart proposed Particle swarm optimization (PSO) [18, 19], since then many researchers have applied this algorithm in real-world optimization problems [20–22]. PSO implements social behavior of bird flocking and fish schooling into searching optimal parameters. In searching process, each particle follows personal best solution and global solution. It is a population-based iterative algorithm and can quickly converge to a reasonably good solution. But sometimes it falls in local best solution especially in multi-model functions. There are many improved PSOs have been presented on how to use each particle to find the best solution effectively. In here, we focus on choosing better inertia weight for the problems. Adaptive weight is applied that uses two different inertia weight particle swarms to test which inertia weight is better to improve both the diversity of the swarm and the range of search [23].
Besides PSO, grey system theory [24] is utilized to solve incomplete information of this study. Since Deng presented the grey system theory in 1982, it has been used in many applications such as agriculture, environment, earthquakes, and marketing. In grey system theory, one of the most used methods is the grey relational analysis or so called Deng’s Grey Incidence Analysis model. It can perform similarity measurement for finite sequences with incomplete information. Grey relational analysis has been successfully applied to cluster analysis or other applications [25]. Each particle in the PSO can be considered as a sequence in grey relational analysis, thus the relationship of the particles can be obtained by analyzing the corresponding grey relational grades [26].
System description
In landing phase, the aircraft descends from the cruising altitude to approximate 1200 feet above ground. The pilots then adjust the airplane towards the runway centerline. At 4 nautical miles away from the runway, there is the outer airport marker and the aircraft receives the glide path signal (as shown in Fig. 1). Along the glide path, the aircraft maintains a constant speed, descending rate (10 ft/sec), and pitch angle (between –5 to +5 degrees). When the aircraft approaches to 20 to 70 feet above the ground, it will switch the control process from glide path control to the flare maneuver control. In the flair path, the aircraft change its pitch angle to 0 to 5 degrees and decreases its descending rate to 2 ft/sec so that the landing gear may be able to absorb the energy of the impact at landing and allows a soft touchdown on the runway surface [6].
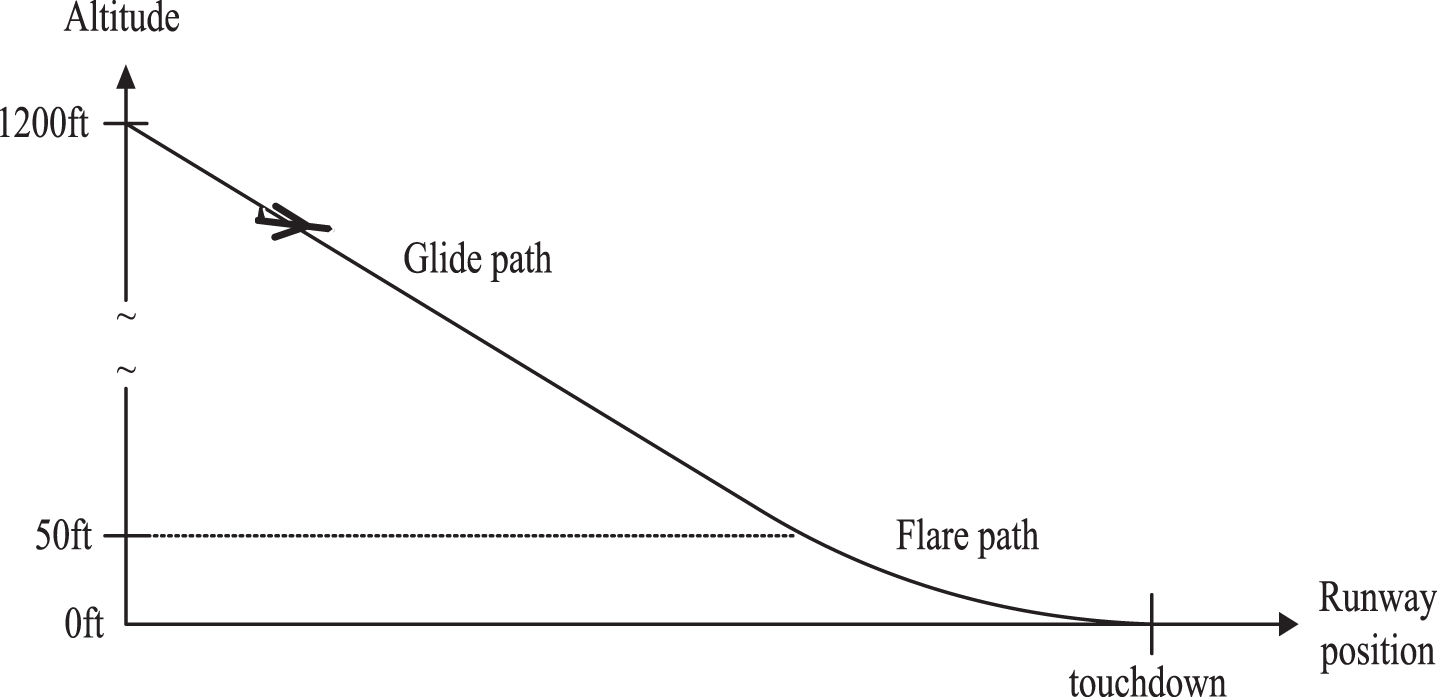
Glide and flare paths.
This study applied a simplified commercial aircraft model in the automatic landing control simulations [5]. Only the horizontal and vertical planes are considered in the control system. Equations (1 to 5) describe the incremental dynamics of aircraft on horizontal and vertical motion. Inputs of the aircraft control system are the elevator command δ
E
and throttle command δ
T
. External disturbance (u
g
, w
g
) is also considered in the simulations.
Δu is the incremental horizontal velocity, Δw is the incremental descending velocity, u g is the horizontal disturbance velocity, w g is the vertical disturbance velocity, Δq is the incremental pitch rate, Δθ is the incremental pitch angle, h is the altitude of the aircraft, δ E is the incremental elevator angle setting, δ T is the incremental throttle setting [6].
Automatic landing system consists of several subsystem, they are the localizer, the glide path coupler, the automatic flare control system, the attitude control system, and the airspeed control system. As the purpose of this paper is concerned, it is not necessary to discuss the ALS in detail. We will limit the discussion on the basic elements combinations of automatic landing system. It includes a reference signal, aircraft dynamics, flight control system, and external wind model as shown in Fig. 2. In Fig. 2, equations of aircraft model are described in Equations (1 to 5). Equation of wind model is from [5] and is added in Equations (1 to 3). A simplified structure of the traditional PID controller is shown in Fig. 3, where its typical parameters are: θpitch = 4°,
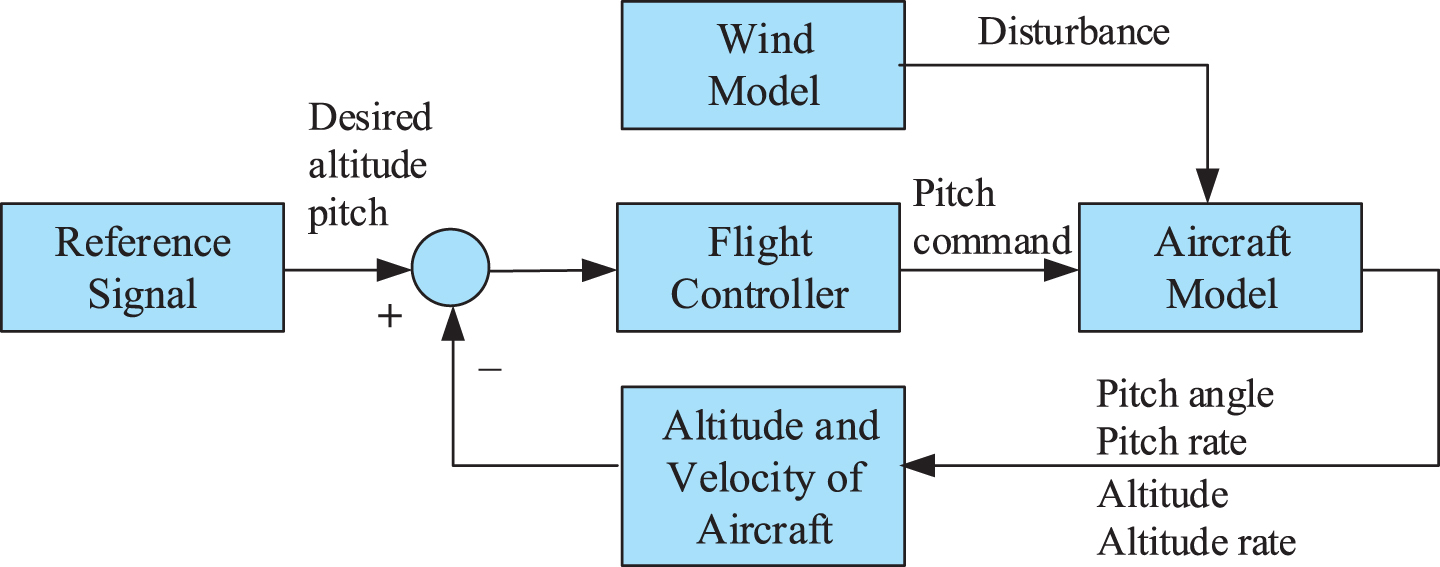
Automatic landing system architecture.
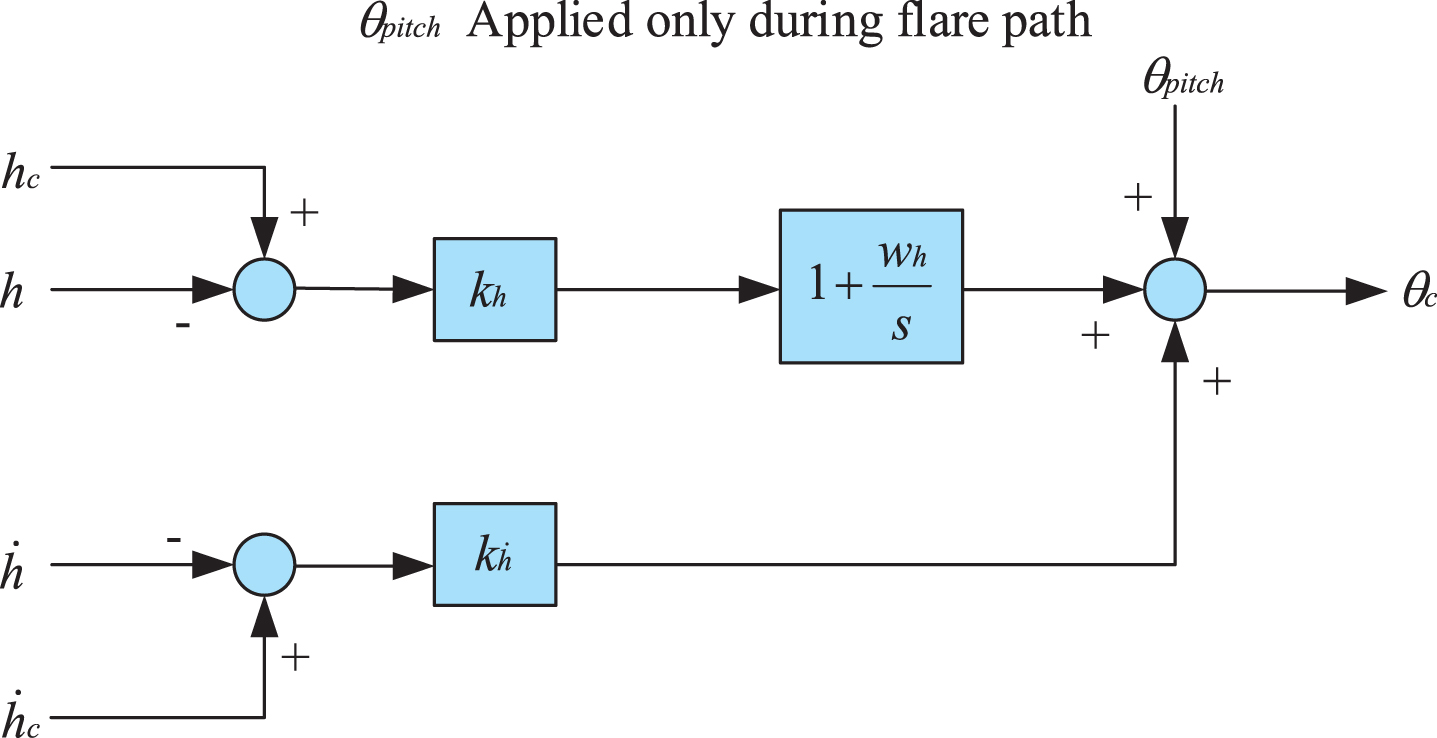
Conventional PID controller architecture.
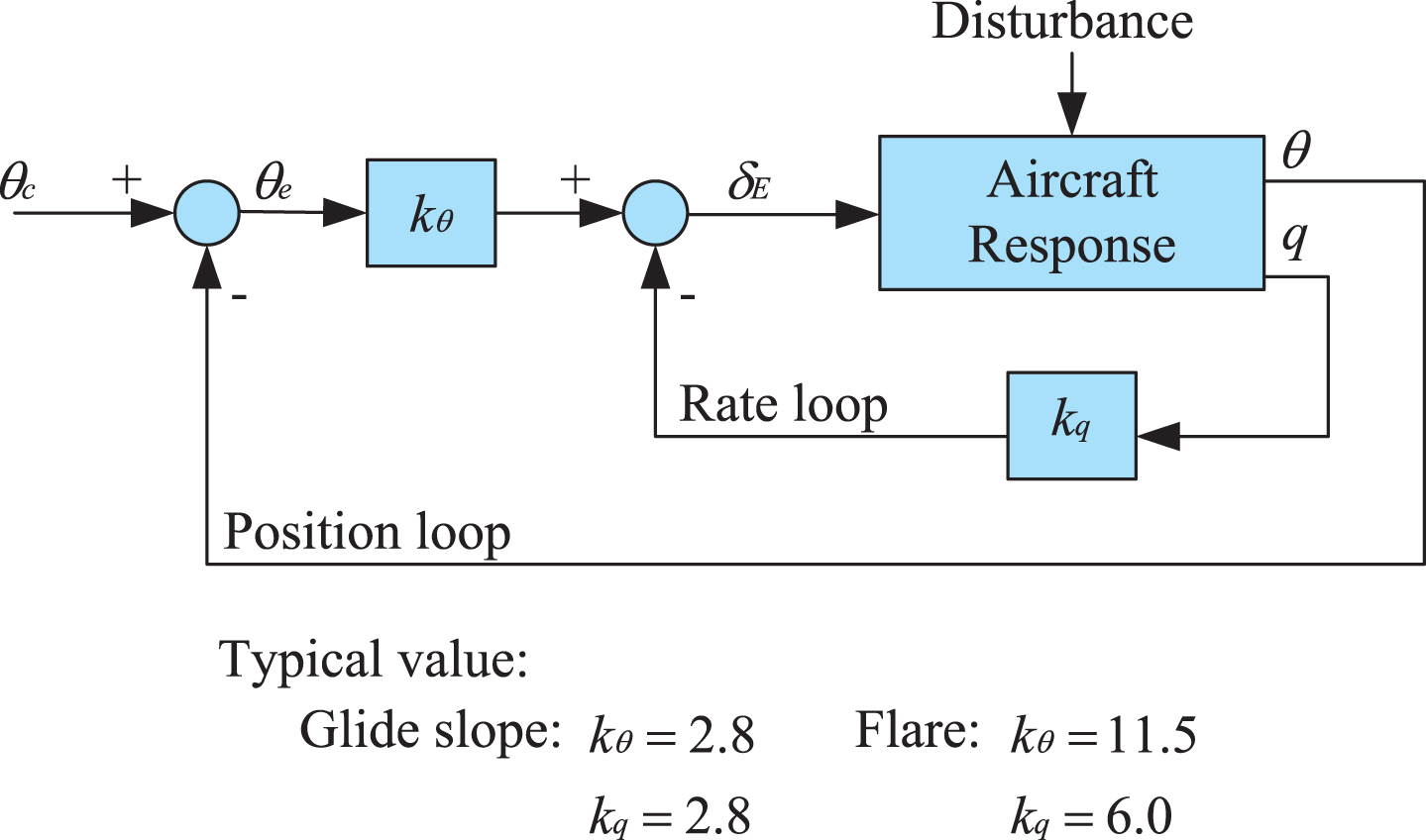
Pitch autopilot.
Aircraft is influenced by environment while flying in the sky. Disturbance wind model presented by Dryden is used in this study [5]. Figure 5 shows a wind profile at the strength of 30 ft/s.
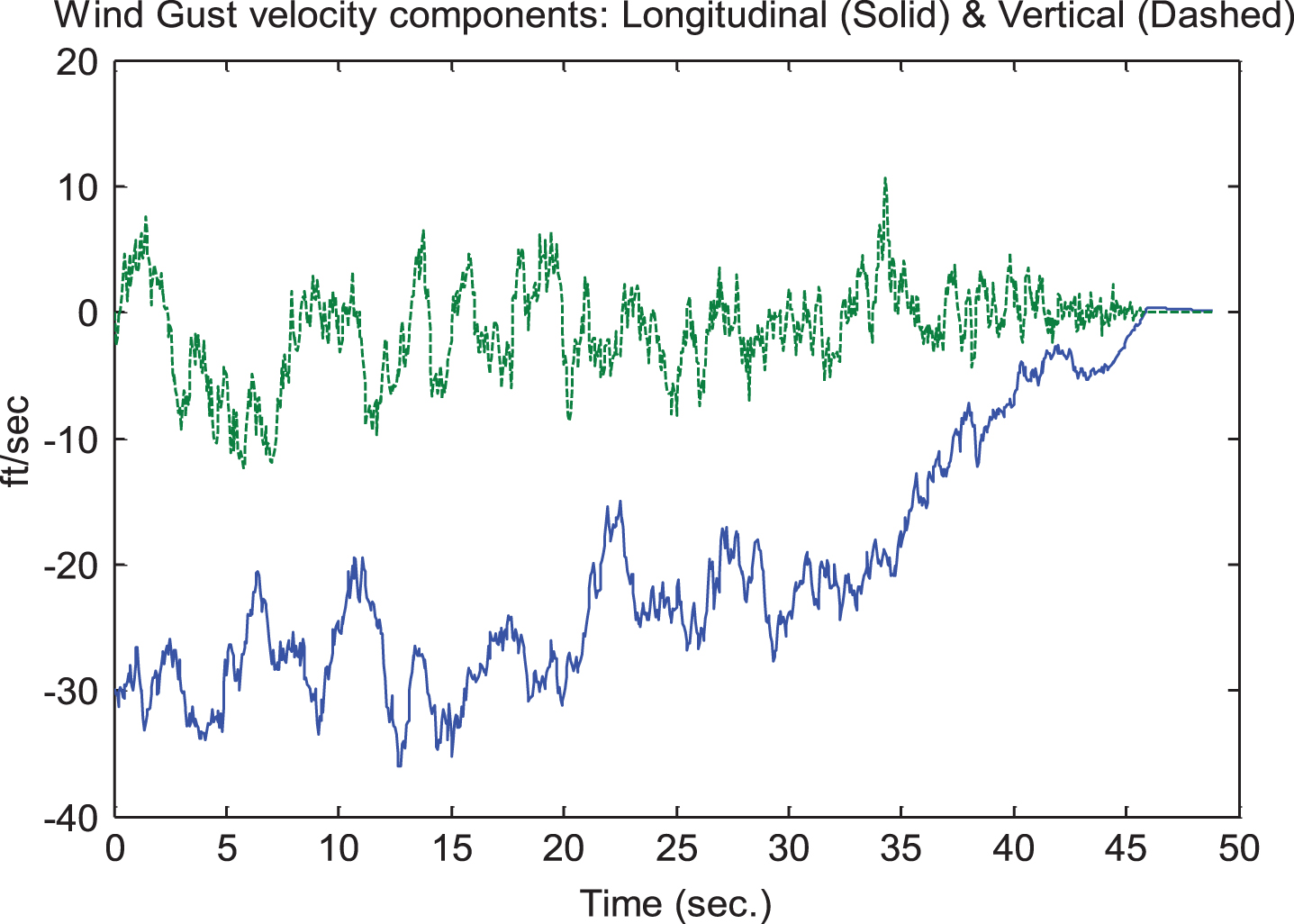
Turbulence profile.
In this study, successful touchdown conditions are: descending rate (vertical speed) is in between –3 ft/sec and –1 ft/sec, touchdown position is between 300 ft and 1000 ft, forward speed is 200 ft/sec to 270 ft/sec, pitch angle is –10 deg to 5 deg.
Control scheme of the proposed intelligent ALS is shown in Fig. 6. Aircraft altitude, Aircraft altitude rate, Aircraft altitude command, and Aircraft altitude rate command are the inputs of the control scheme. They are also inputs of the PID and FSMC controllers. Outputs of the PID and FSMC controllers, U
PID
and U
FSMC
, are added to be the input of the pitch autopilot, U. In most of the aircraft control systems, the conventional PID controller is the main controller. It provides necessary control signals to the aircraft. In here, the PID also provides information to the FSMC controller in learning process. The FSMC controller can provides compensation to the aircraft in severe disturbance conditions. The PID control gains were from the reference [5] by the use of Ziegler and Nichols rule. The
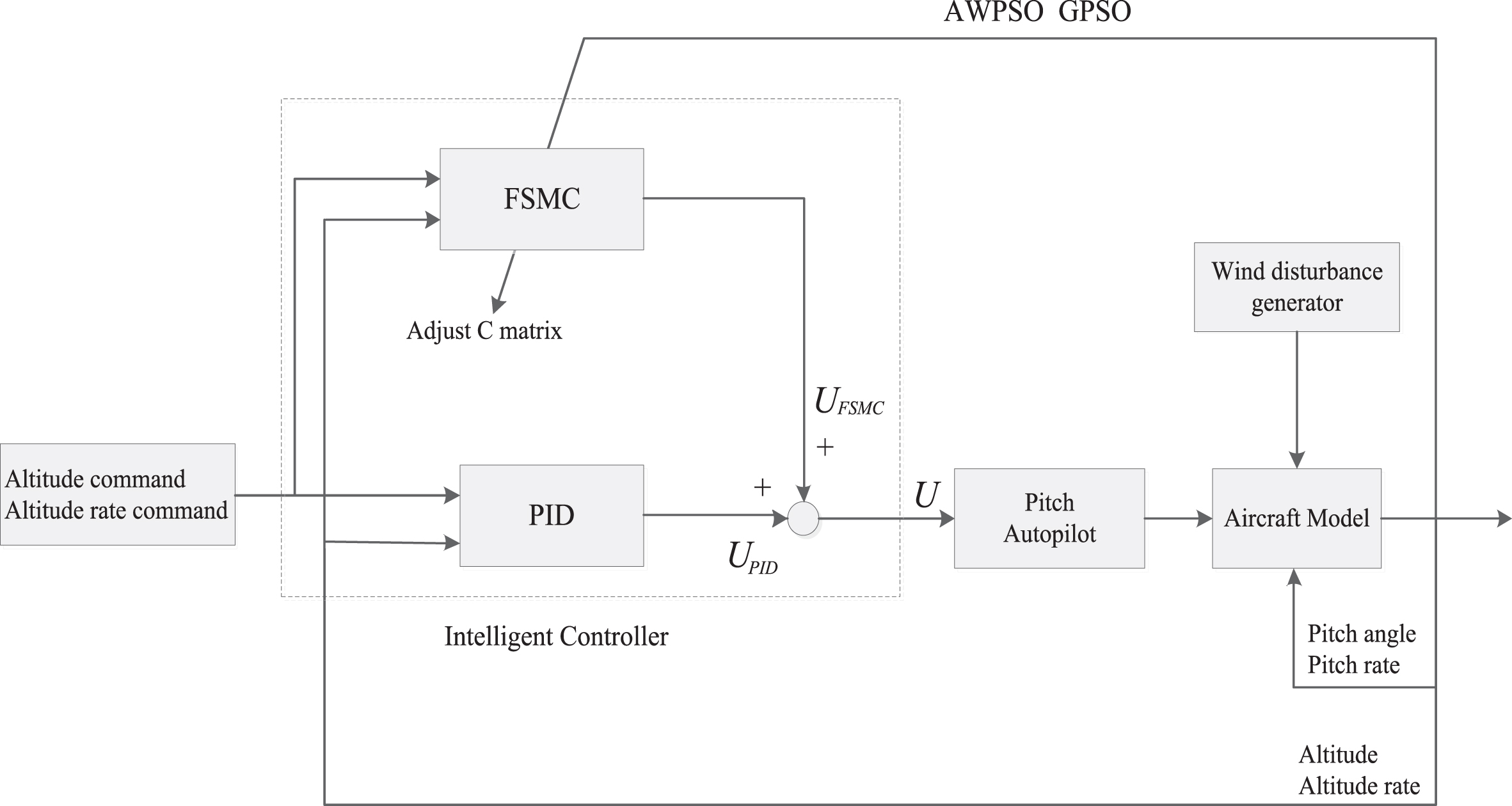
Control scheme.
At each sampling instant k, aircraft dynamic model is Y (k). Y d (k + 1) is the desired model at instant k + 1, as shown in Fig. 7. In the recall process, U FSMC and U PID are integrated to obtain the control signal U. Figure 8 shows the learning process. U FSMC is from the recall process and is used as the desired output. By applying optimal searching, convergence of system error can be obtained and the FSMC system can play as a compensator to the PID controller.
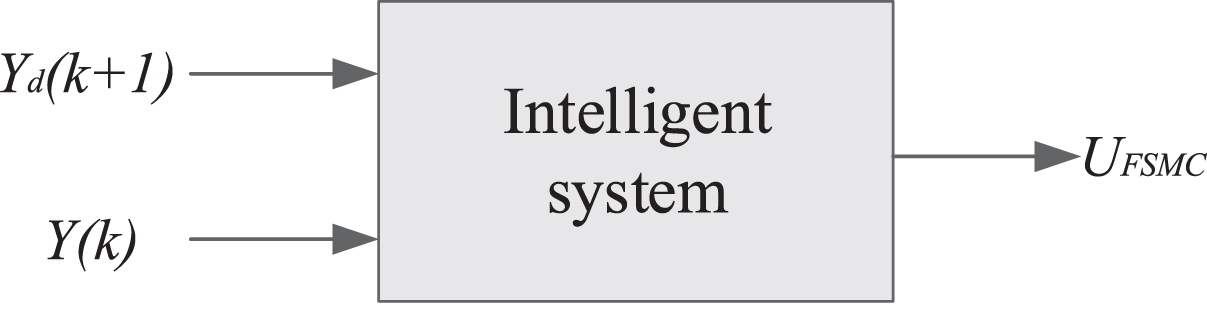
The control process of intelligent system.
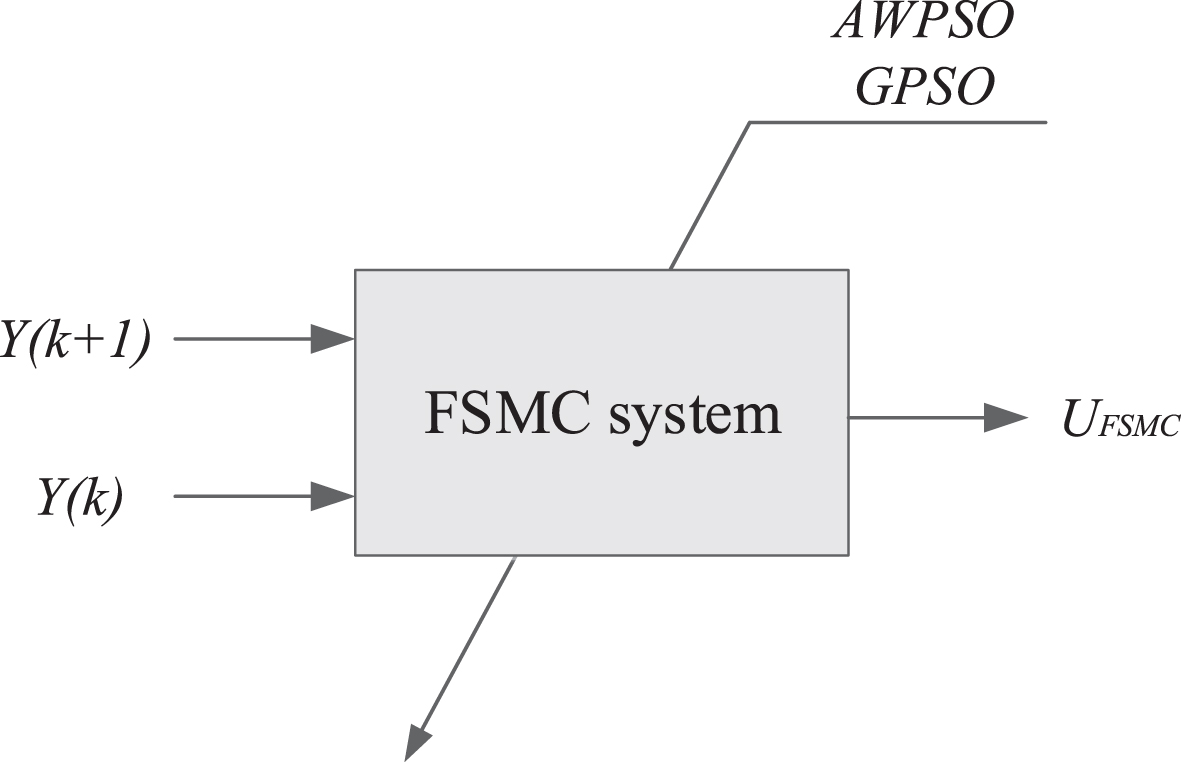
The learning process of FSMC system.
SMC was confirmed for a system of nonlinear systems and interference with good performance [10–12]. The advantages of the SMC are good transient performance, fast response, and insensitive to disturbances. SMC has been successfully applied to systems with external disturbances and bounded parameter uncertainties. The SMC involves following two steps. First, reform Equations (1 to 5) in state space model:
Define the sliding surface as
Let
Thus, Equations (7) becomes
By solving (9), u
eq
is
Choose switching control u
sw
as
Where sgn (s) is
Equation (13) is then used in sliding surface, we obtain
Define a Lyapunov function candidate as follow:
The sliding condition is
From (14) and (16), we can obtain
If we select the control gain
The select k compare with results of
Since the SMC has chattering phenomenon along the sliding surface, how to eliminate this problem is considered in this study. The sgn (s) function is replaced by the function
To ensure differentiation of Lyapunov function is less than zero and to reduce the error on the sliding surface [12–14], this study applies fuzzy system to obtain the control gain k of the SMC. The SMC is then becomes fuzzy SMC or FSMC. In the FSMC, the gain k is updated online and the sliding condition (17) can be satisfied. The control system can be kept in stable condition. In here, inputs of the fuzzy system are s and
Fuzzy rules for the control gain k
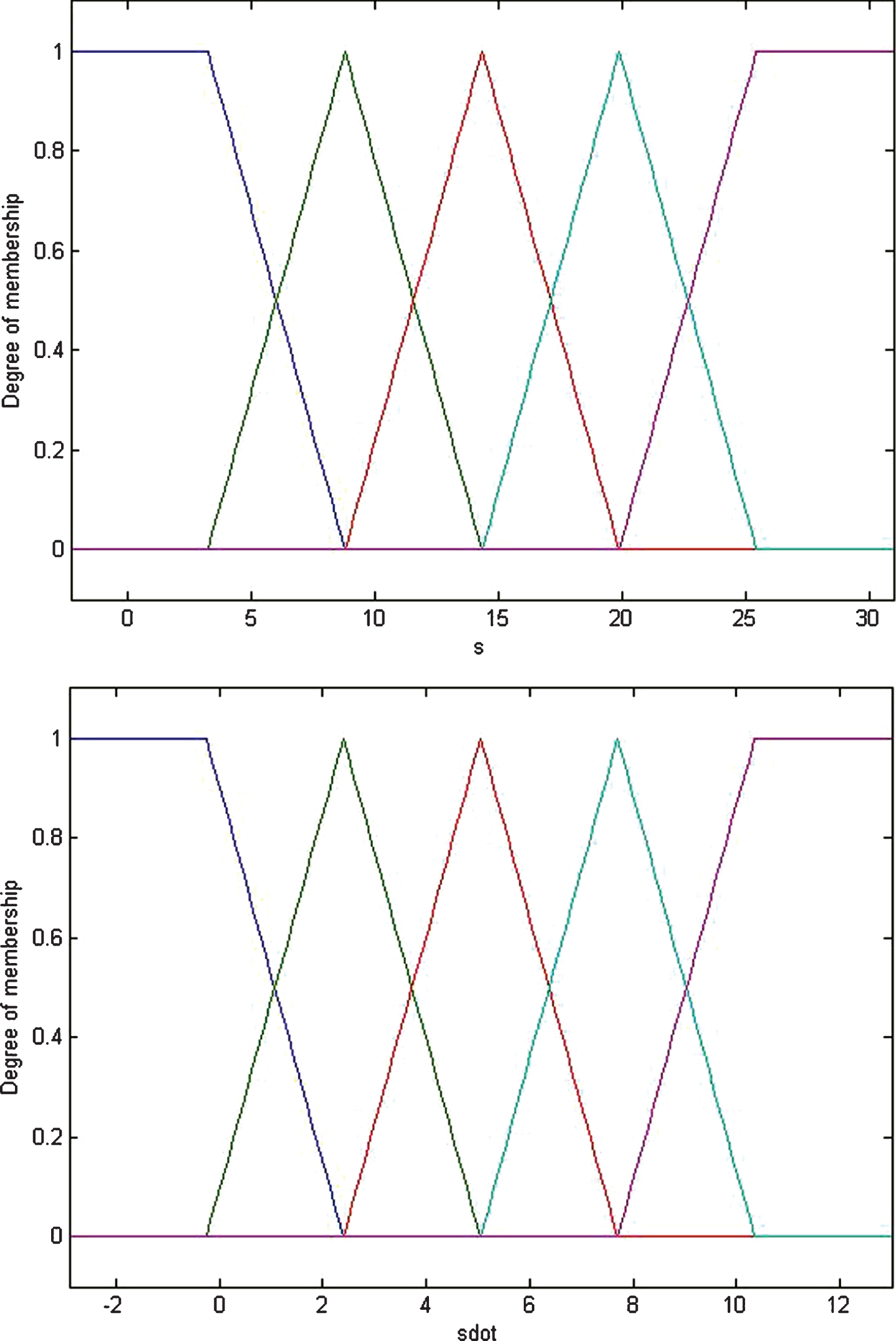
Fuzzy membership functions of the inputs s and
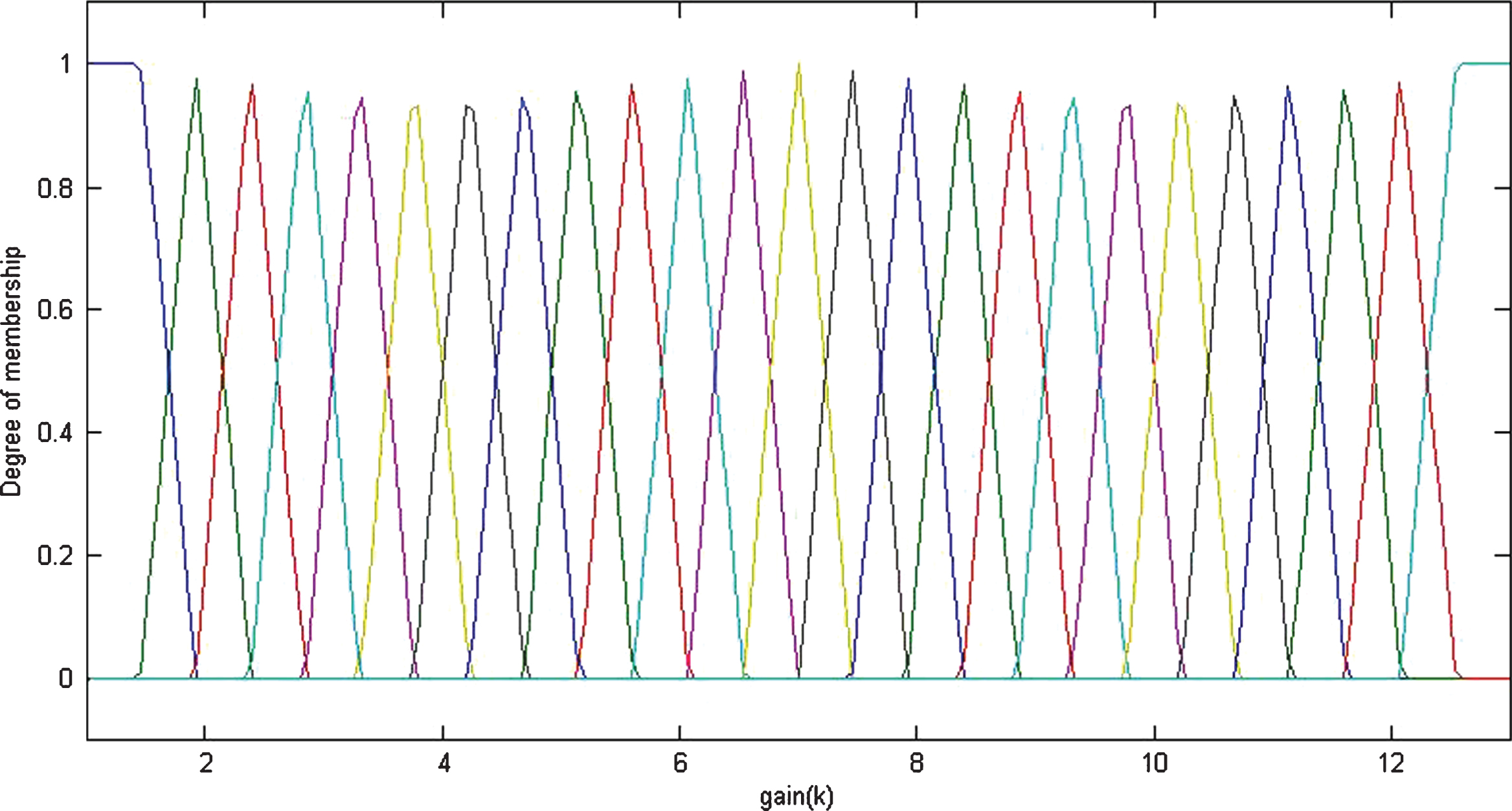
Fuzzy membership functions of the output gain k.
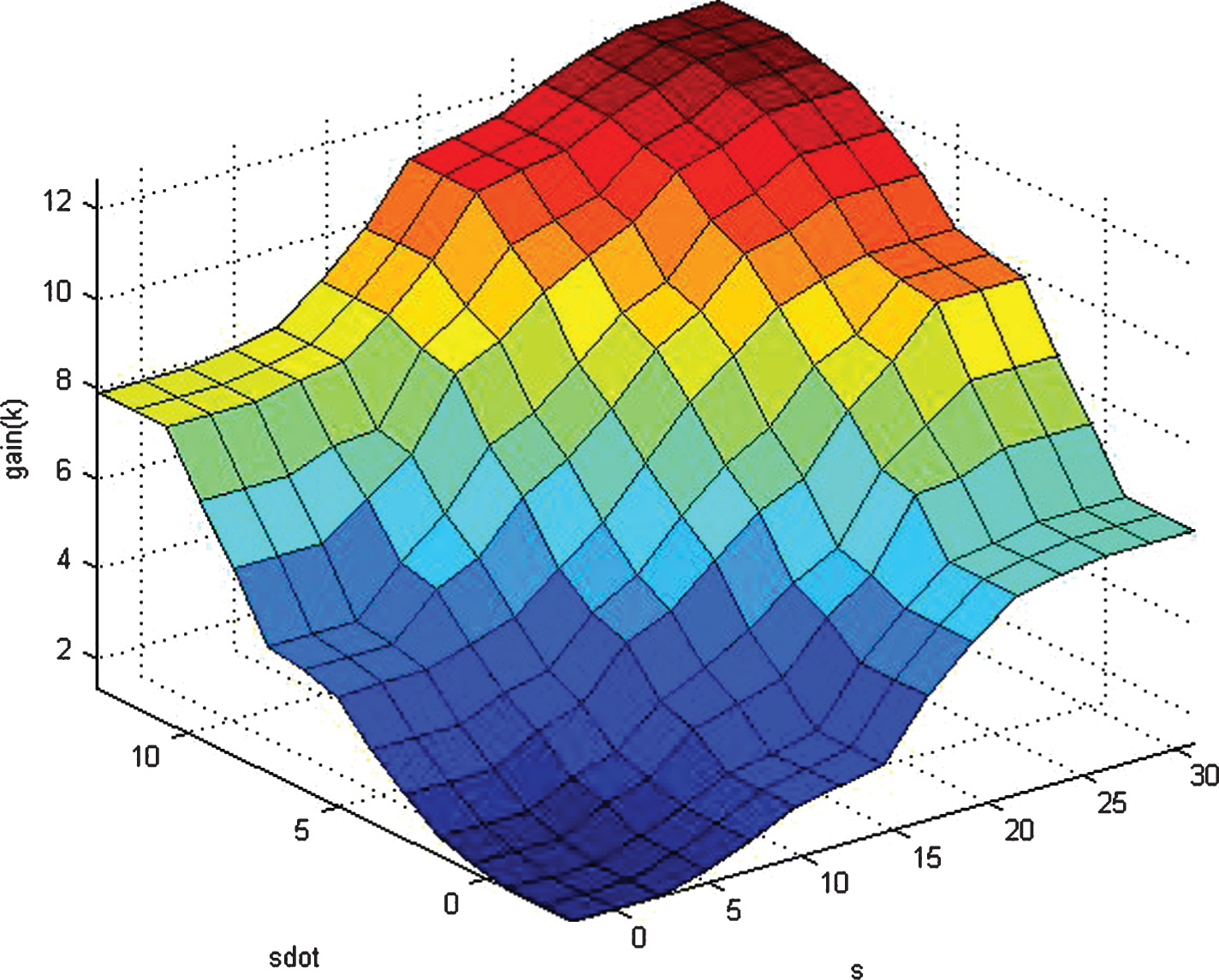
Fuzzy output function with respect to inputs.
The PSO methods are used to tune the parameters in
Grey-based PSO
In this study, we combine grey relational analysis and PSO to find optimal controller parameter matrix. For partial information sequences, the grey relational analysis can be used for similarity measurement [24]. Given a reference sequence x = (x1, x2, x3, …, x
n
) and the comparative sequences y
j
= (yj1, yj2, …, y
jn
), where j is 1 to m. At kth data, between x and y
j
, the factor of grey relation is
Δ
jk
= |x
k
- y
jk
|,
The greater the grade is, the better the comparative sequence is. α
k
is a weight of r (x
k
, y
jk
) and
From (22) we can obtain r id ∈ [ξ/(1 + ξ), 1] and g i ∈ [ξ/(1 + ξ), 1].
An improved PSO was proposed in [27] that the authors used varying inertia weight in different generations. By varying the inertia weight from 0.9 at the beginning to 0.4 at the end of search, optimal solution can be obtained. If a particle is far away from the fittest particle its relational grade g
i
is also small. Thus we should give a larger inertia weight w
i
to that particle. If a particle is in the exploitation state, then a small weight should be assigned to that particle. Since g
i
∈ [ξ/(1 + ξ), 1] and w ∈ [0.4, 0.9], we can obtain a function of g
i
and w
i
as:
To simplify the time-varying process, the acceleration factor can be obtained by the following nonlinear transformation.
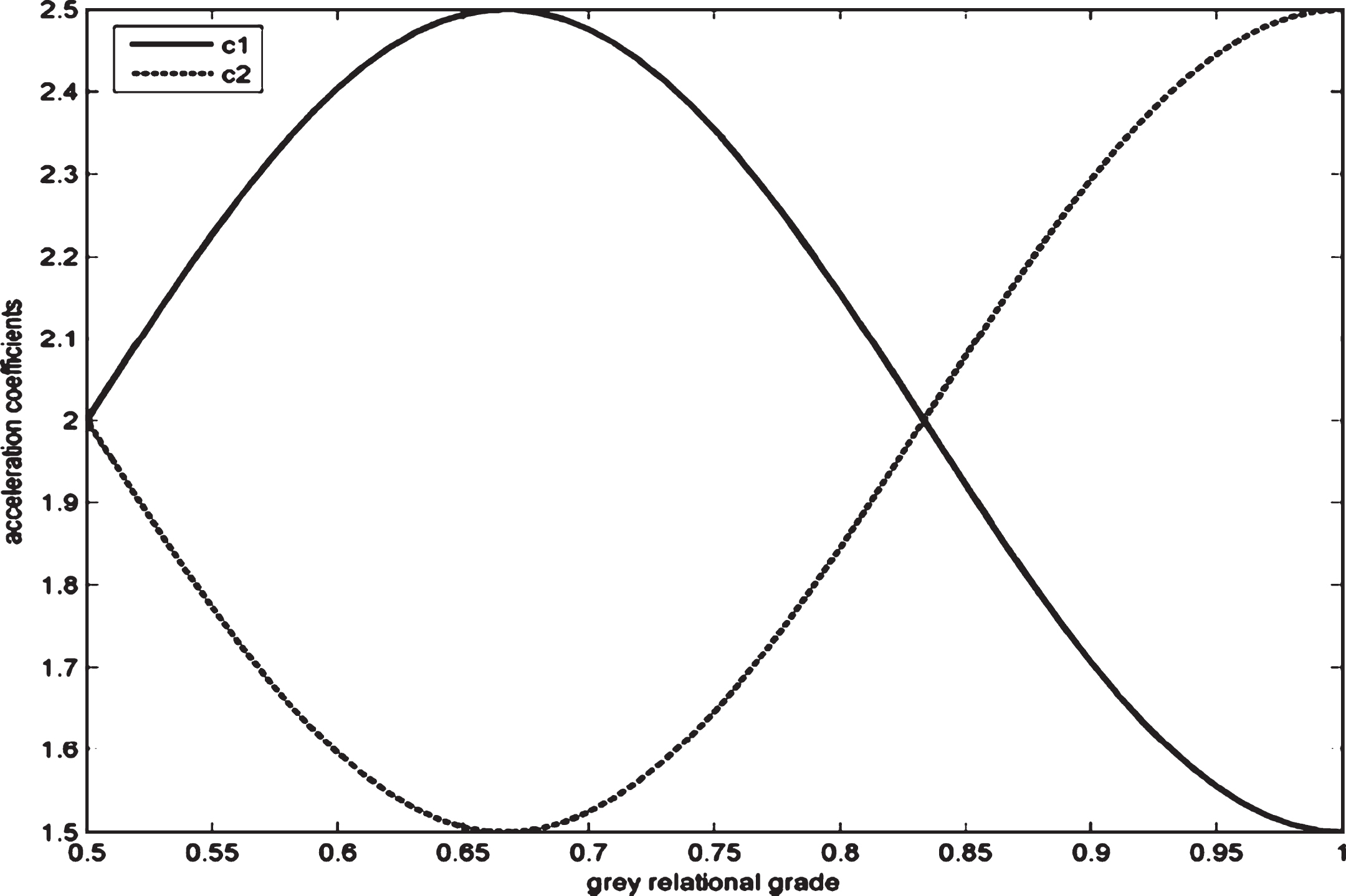
Relationship between grey relational grade and acceleration coefficients for ξ = 1.
From (24) and (25) we know, in the evolution, every particle has the fact that C1i + C2i = 4.0. In the exploration state, a small C2 and a large C1 are assigned to a particle which can help the swarm to explore local optimums and maintain diversity. If the particle is in the exploitation state, a large C2 and a small C1 will help the particle converging to global optimum [24].
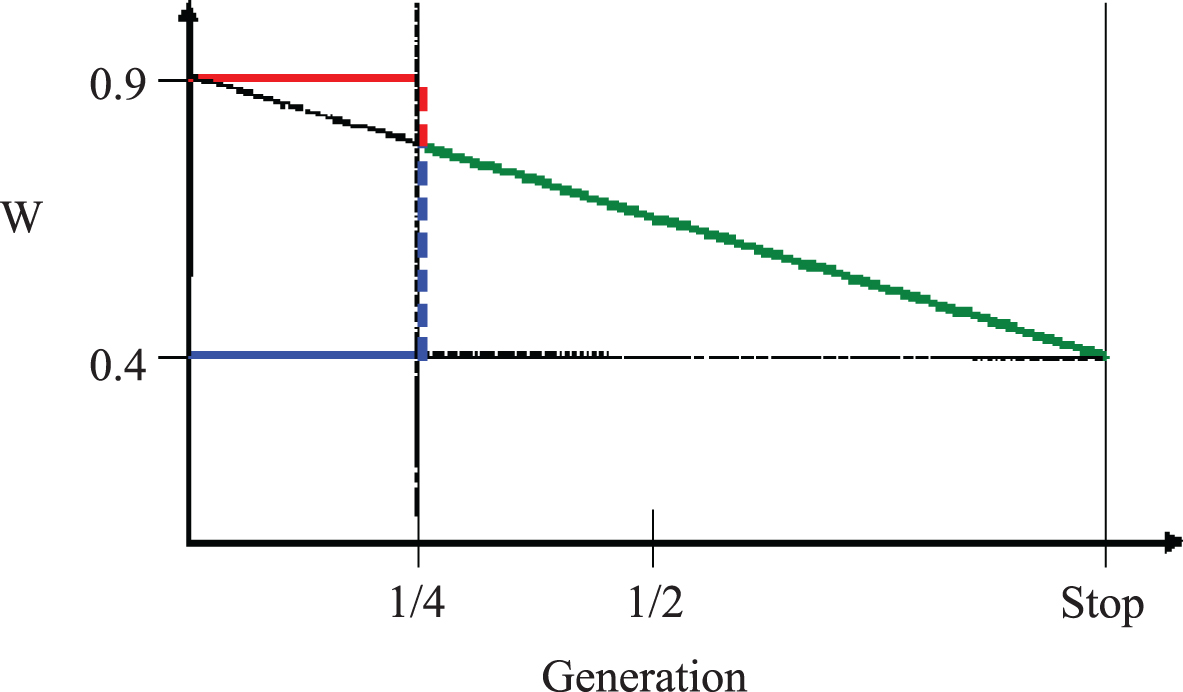
In this method the outset particles were randomly divided into two groups each given inertial weight 0.9 and 0.4. And then let the two groups independently search, determine the function characteristic that is through the two groups fitness to compare, then merge the two groups suitable for the inertia weights of characteristics continued to search for half of the total time. Finally, go back to linear decreasing way for the rest of the time to improve the accuracy [23]. Time plan is given in Fig. 14. These improvement algorithm’s steps are:
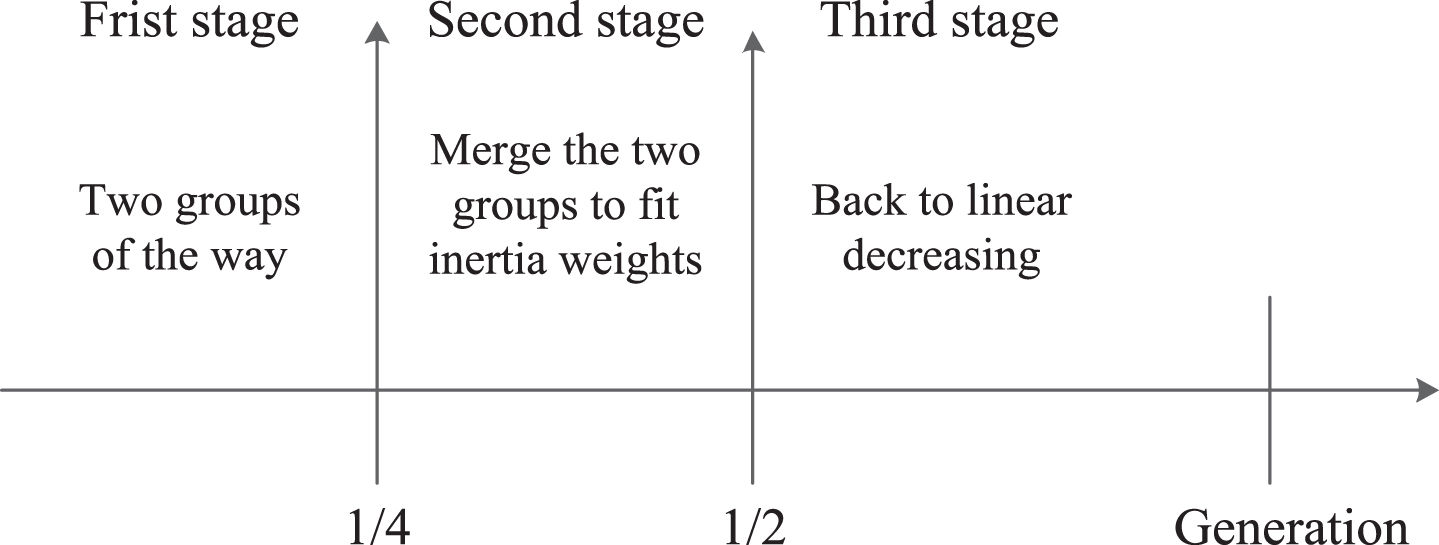
Time plan.
Particles were randomly divided into two groups, a group using inertial weight of 0.9 speed search, another using inertial weight of 0.4 speed search.
When one-quarter generation are determined that suitable for 0.9 or 0.4 (decision table is shown in Table 2), and then merge two groups using suitable inertia weights in calculation until half generation are done.
Back to linear decreasing mode.
Inertia weight decision rules
Map of concept is given in Figs. 15 to 17.
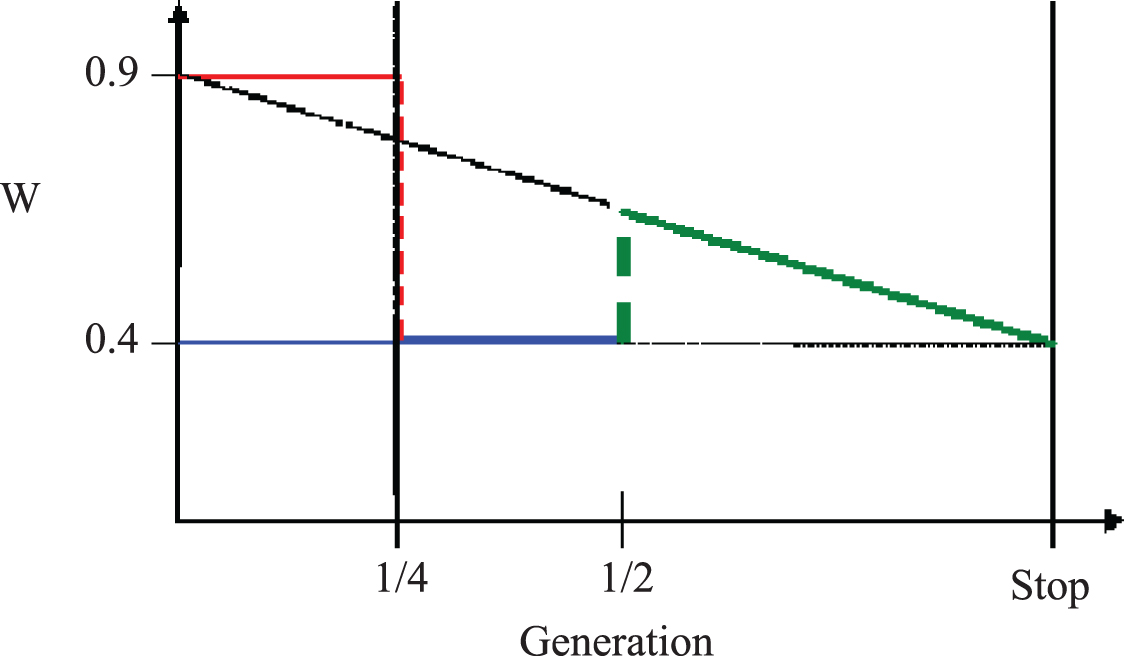
When one-quarter generation are determined that suitable for 0.4.
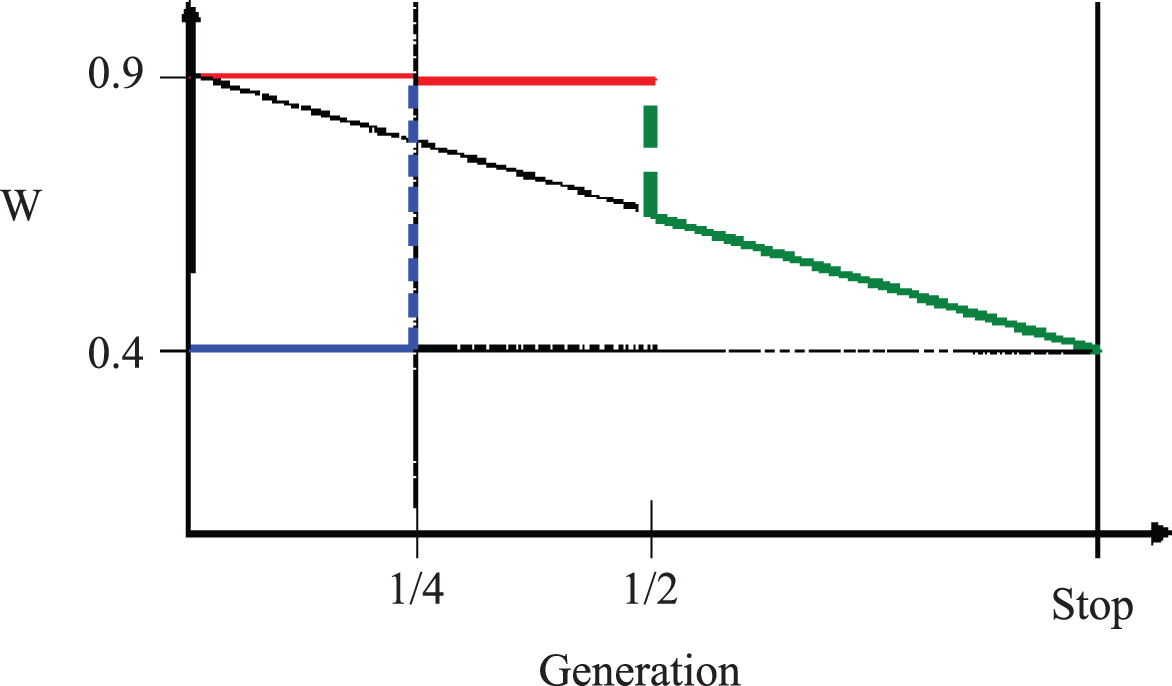
When one-quarter generation are determined that suitable for 0.9.
When one-quarter generation find 0.9 and 0.4 have same performance.
Because inertia weight is small, the particles will converge rapidly, but this does not guarantee a good result. It may be premature convergence (local optimal solution). In a limit searching time, the initials rapidly converge to near the area of minimum, and revert to the faster speed that is helpful to improve accuracy and convergence rate. Figure 18 shows the operation of adaptive weight particle swarm optimization.
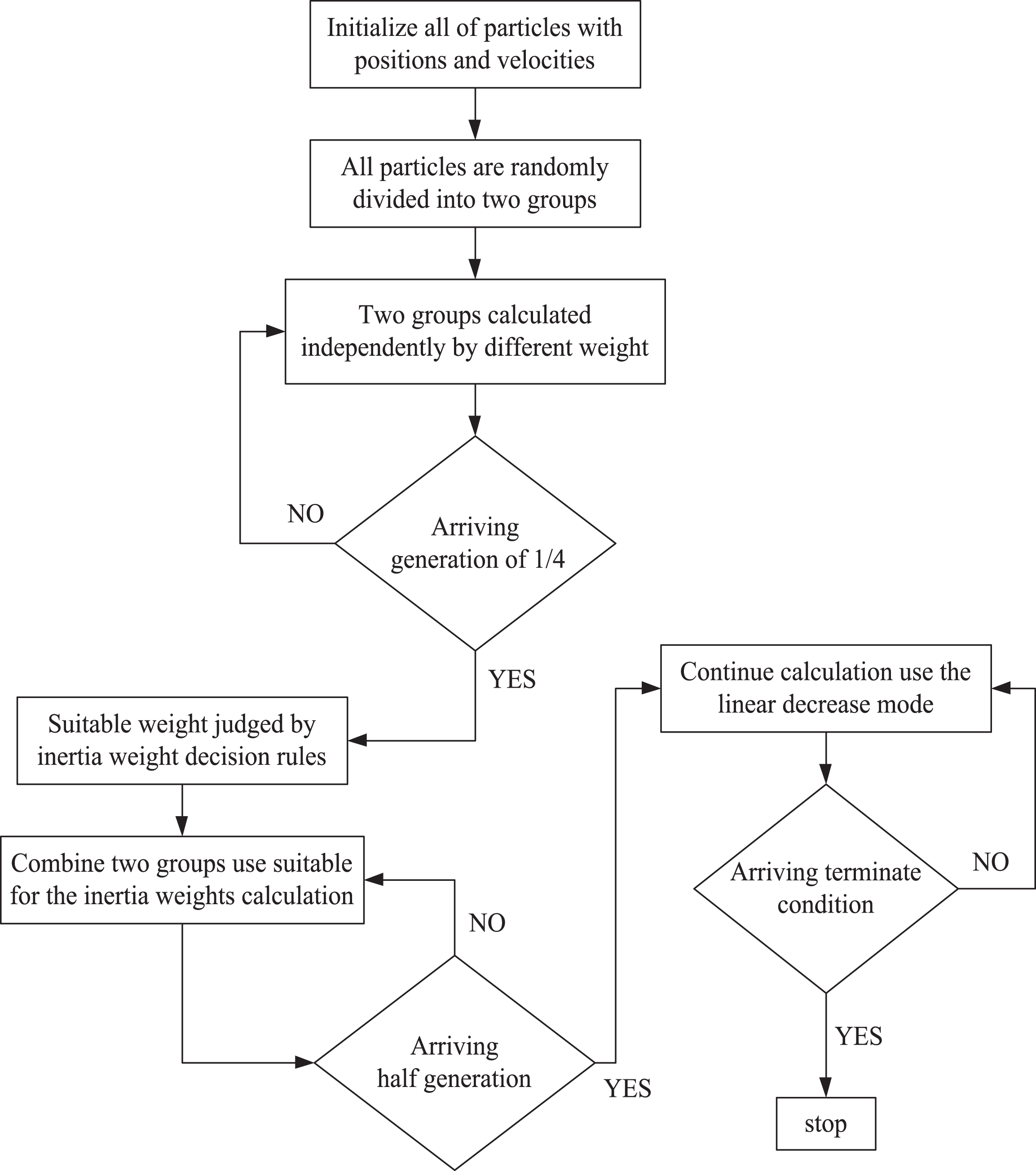
Flowchart of adaptive weight particle swarm optimization.
According to the conditions of safe landing, the simulation results under conventional pitch autopilot with original control gains show that the PID controller can guide the aircraft landing safely only up to 30 ft/sec of initial turbulence strength. If the wind speed is greater than 30 ft/sec, the ALS is unable to provide safe landing [5]. The performance of the PID and FSMC compensator with AWPSO is shown in Table 3 and the searched
The results from using FSMC-PID with AWPSO
The results from using FSMC-PID with AWPSO
Turbulence profile (initial strength 138 ft/sec).
Aircraft altitude and command at wind speed 138 ft/sec.
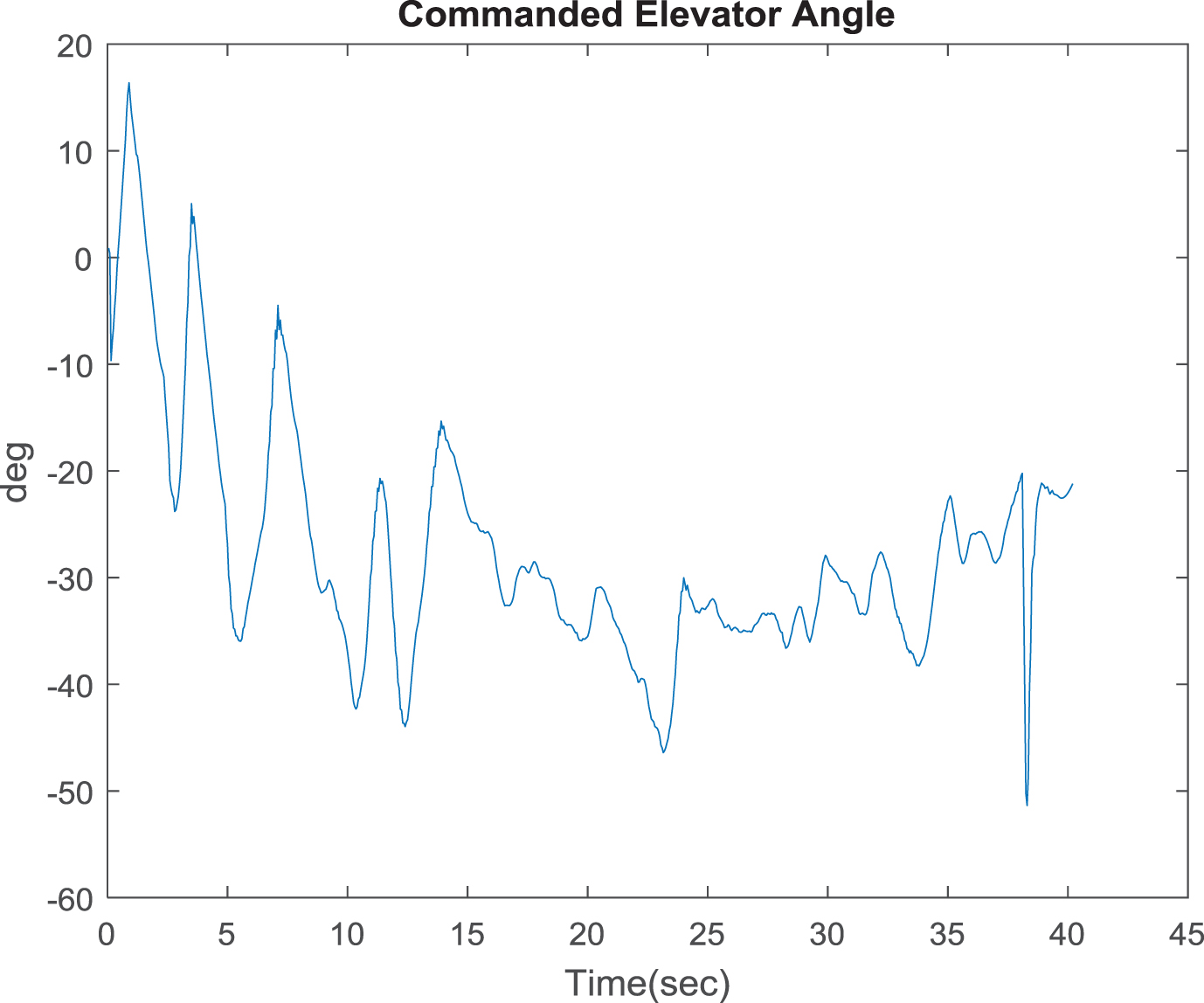
Commanded elevator angle at wind speed 138 ft/sec.
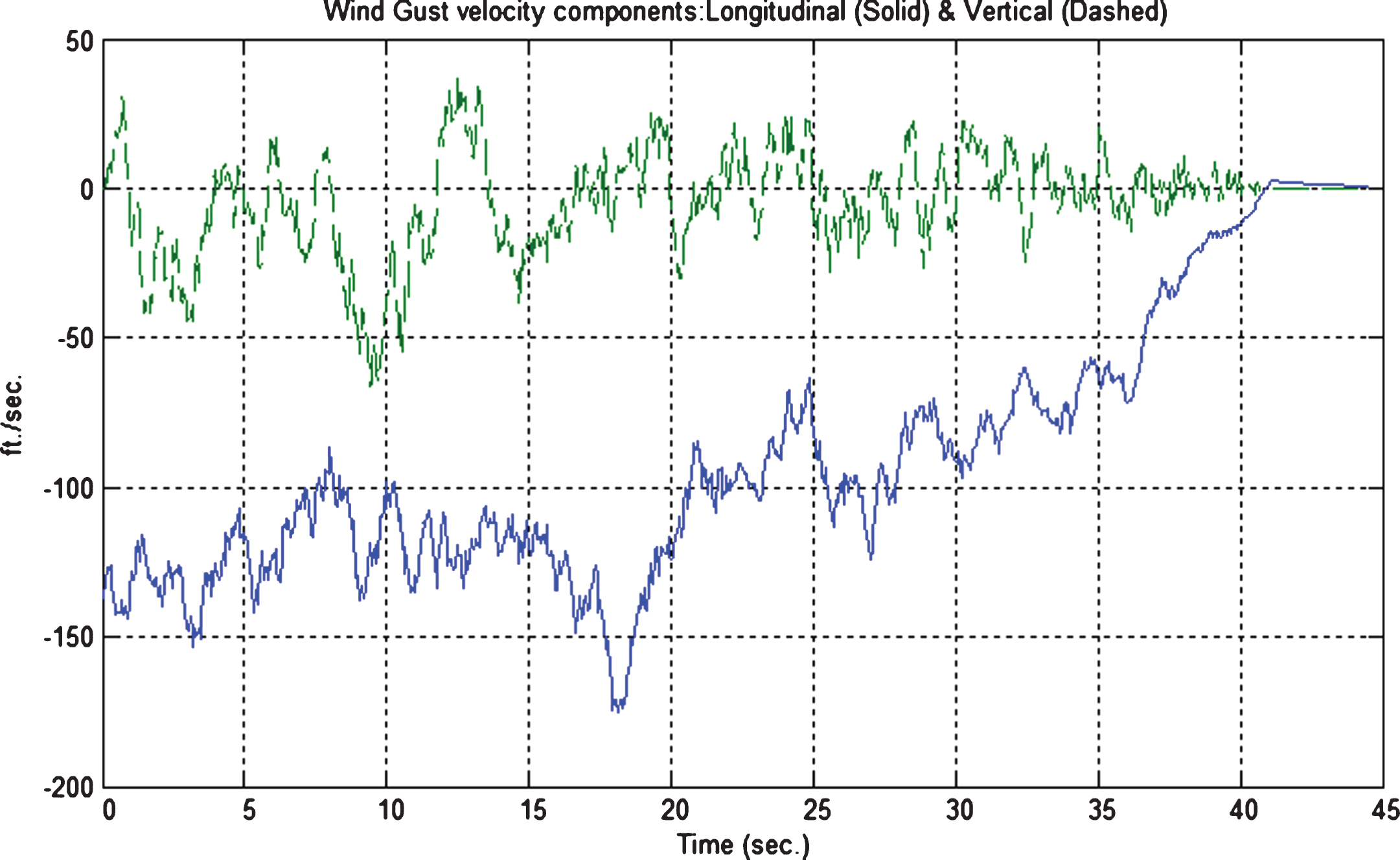
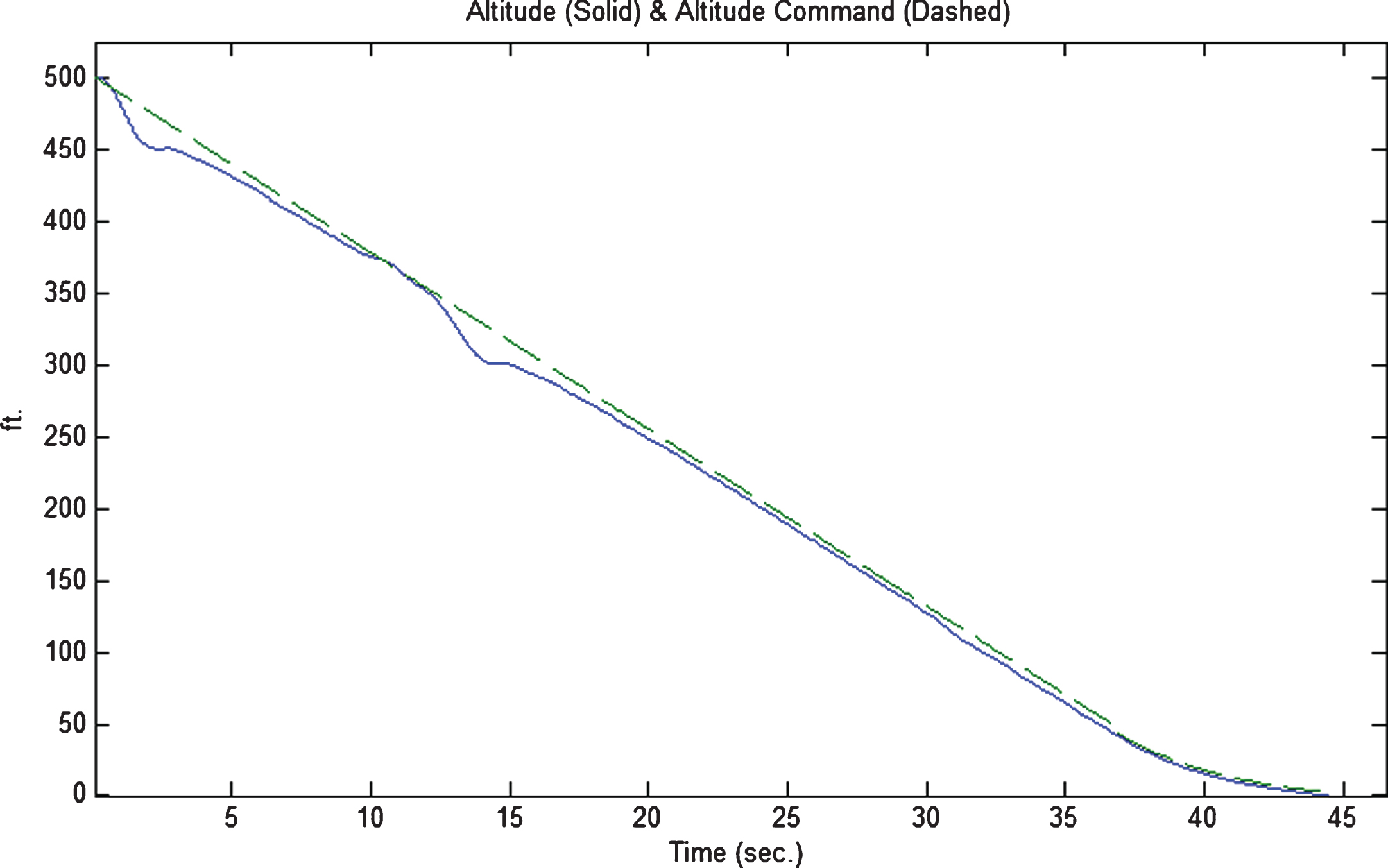
The FSMC-PID with GPSO control scheme can successfully control the aircraft to overcome wind speed of 145 ft/sec, as shown in Table 4. The situations at wind turbulence 145 ft/sec are: pitch angle 3.7208 degrees, descending speed –2.5110 ft/sec, horizontal velocity 234.6779 ft/sec, touchdown position 562.3170 ft, as shown in Figs. 22 to 24.
Compare to previous studies [5, 28], as shown in Table 5, the proposed FSMC-PID with advanced PSOs have better performance than conventional PID controller, feedforward neural network (NN), resource allocating network (RAN), and recurrent neural network (RNN).
The results from using FSMC-PID and GPSO
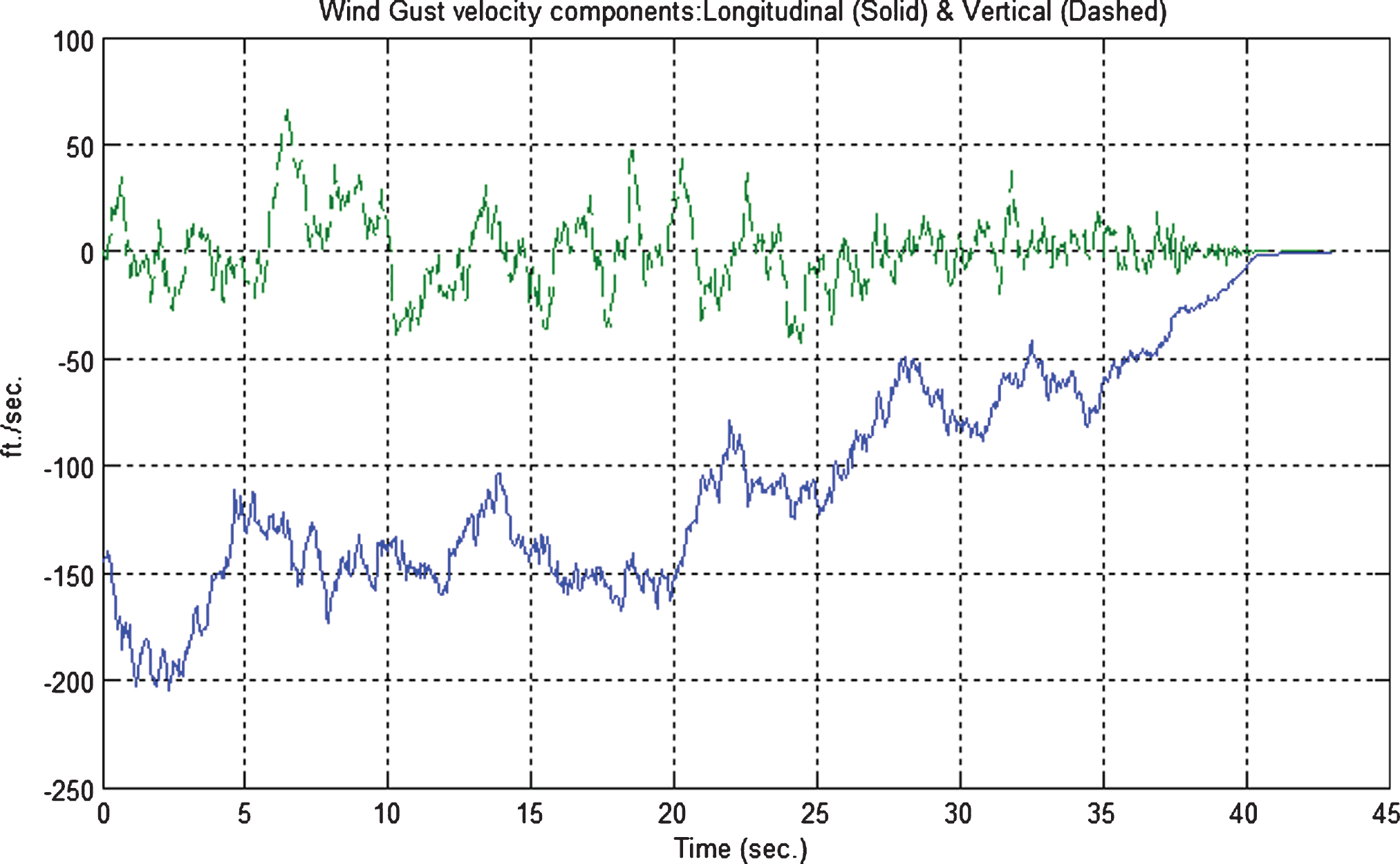
Turbulence profile (initial strength145 ft/sec).
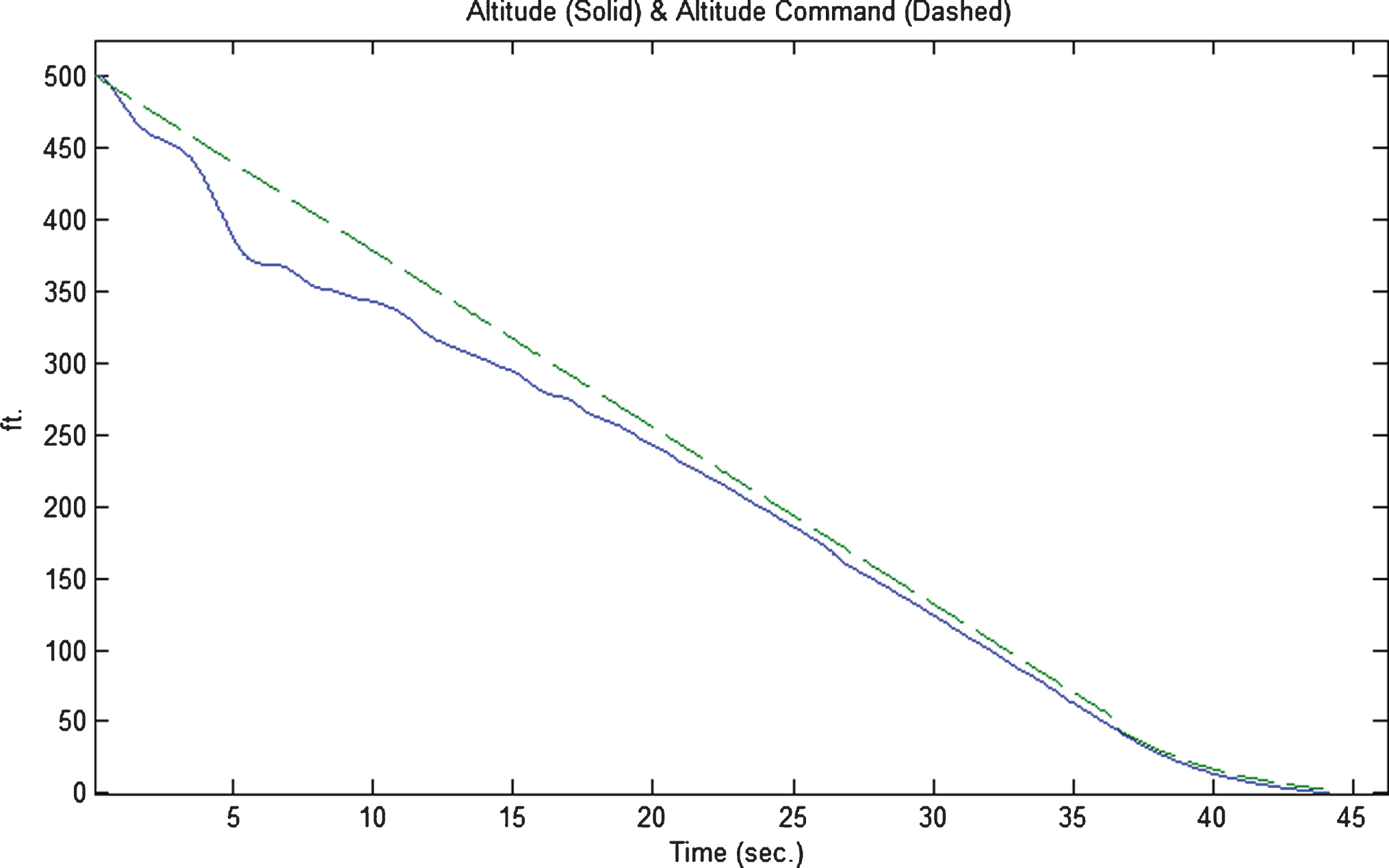
Aircraft altitude and command at wind speed 145 ft/sec.
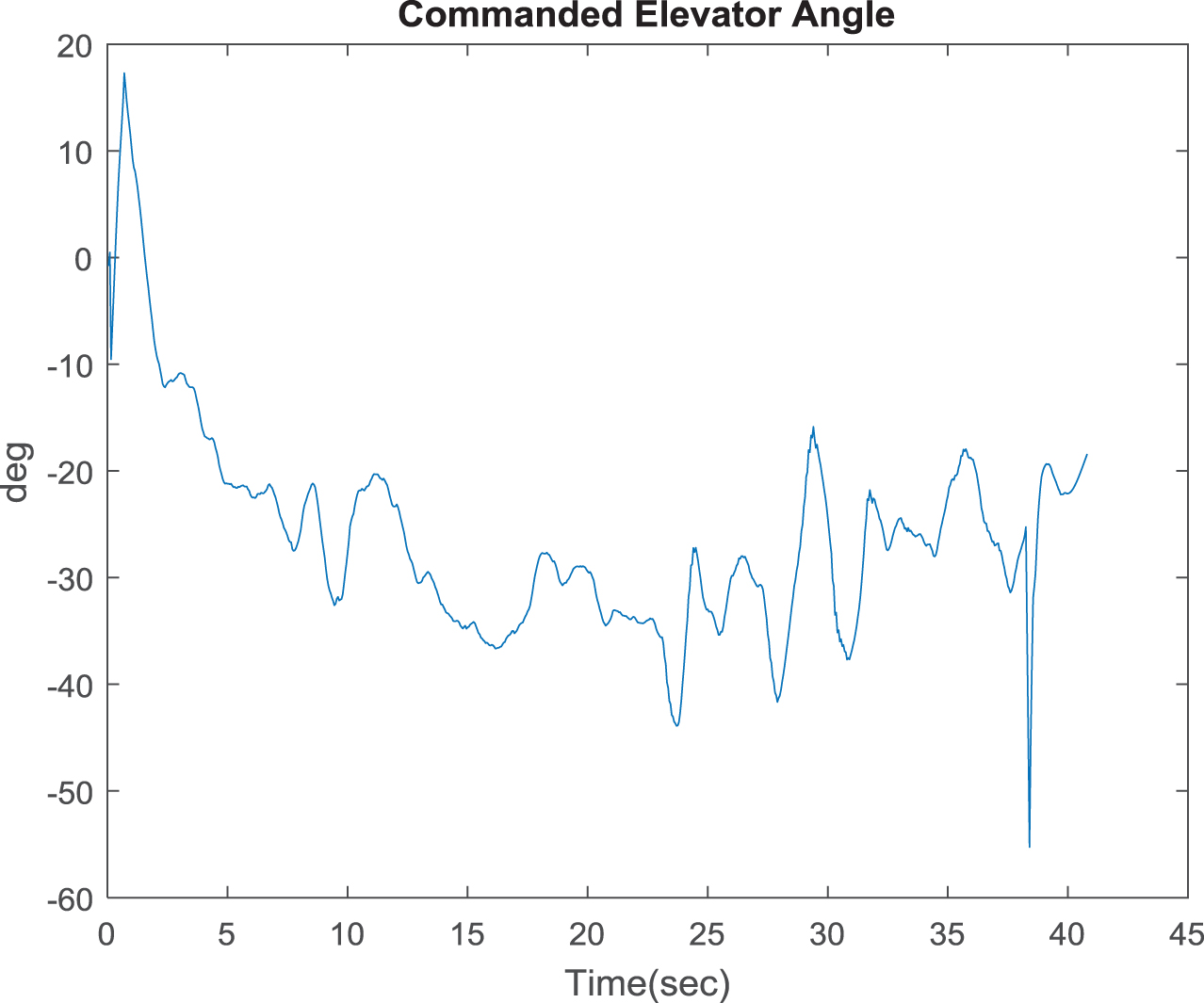
commanded elevator angle at wind speed 145 ft/sec.
Comparison of PID, NN, RNN, RAN, and FSMC controllers
This paper presents application of fuzzy sliding mode control to aircraft automatic landing system. Modified optimization algorithms are applied to improve the performance of the flight control system under wind disturbance environment. Fuzzy sliding mode controller with advanced PSO can compensate for PID controller and guide an aircraft to a safe landing. The PSO is regarded as an improvement calculation method. In turbulence condition, the proposed controllers improve the robustness of automatic landing controller to 145 ft/sec of turbulence strength. The fuzzy sliding mode controller and modified optimization algorithms can effectively improve the intelligent system to against external disturbance. In addition, we utilize the Lyapunov theorem to analyze stability and select optimal updating rule for the proposed controller. In the intelligent system concept that we used, descending path tracking and environmental adaptive capability are demonstrated in software simulations. Obviously, this attempt carries out a good substitute scheme for conventional controller. This paper only presents longitudinal plane control. In real flight control system it also needs lateral plane control which is the next phase of our project. After that the real flight control system will be considered.