
Abstract
A myoelectric prosthetic limb can be directed by sEMG signals from amputee’s residual muscles. The capability of such prosthetic hand may be enhanced by classifying additional hand motion commands. As the amputee’s residual muscles are limited and it is essential to come up with the ways to identify as many hand motion directions as possible with sEMG signals recognized by few sensors. Recent algorithms for pattern recognition in sEMG signals are tested with limited recognition patterns and inconsistent classification accuracy. The proper choice of denoising algorithm has intense effect on classification rates. Therefore FIR-median hybrid (FMH) filter, and discrete wavelet transform (DWT) denoising methods are used in this work for filtering sEMG signals. Five time domain features are used for classification of motions and four different physical activities are classified using ANN. It is observed from the results that FMH filter removes noise more effectively as compared to DWT which improves the classification accuracy.
Keywords
Introduction
The electrical exemplification of neuromuscular activation connected to a contracting muscle is called as EMG signal. The signal indicates anatomical and physiological characteristics of muscles. Essentially, an EMG signal is the measure of electrical activity in motor units of muscle, which further subdivides into two categories: surface EMG and intramuscular EMG.
EMG signals from the surface may be measured using non-invasive electrodes. Nowadays surface-detected signals are ideally used for extraction of data indicating time or strength of superficial muscle activation. EMG is like a diagnostic tool for distinguishing neuromuscular related diseases [1] like low-back pain, dysfunction of motor control and kinesiology etc. The biomedical signals from surface of skin generally include a significant component of noise which deteriorates the resolution of biomedical recordings. Thus EMG signal analysis is a difficult task due to the complex pattern of signal particularly during movement [2]. These signals may be treated as regulating signals for prosthetic instruments e.g. hand, lower limb etc. Surface electromyogram (sEMG) signals have widespread applications in control of human-support robots, rehabilitation instruments, for example sEMG based wheelchair controller [1], bio-medical robotic applications [3], diagnosis of neuromuscular diseases, industrial electronic equipment, exoskeletons [4], industrial robotics [5], and other clinical applications [6–8]. These applications have impact on the lives of normal people as well as differently abled persons and amputees.
However detailed EMG signal processing is a precondition to use these applications productively. The primary constituent of noise is from electrodes, cable movement, power line interference due to electronic amplification systems and additional electrical signals generated by heart and nervous system [9, 10]. Some of the noise components like line interferences, thermal noise etc. can be reduced by traditional filters like low-pass, high-pass, and band-pass filters. High-quality electrical equipment may also result in reduction of undesired artifacts to a certain extent [11]. But these methods are helpful only when we know the noise spectrum and noise is distinguishable from original signals.
This paper aims to explore the sEMG (surface EMG)-based detection of hand motion instructions for myoelectric prosthetic arm and de-noising methods to get higher classification accuracy. It is important to classify additional hand motion commands so as to increase capability of myoelectric prosthetic hand for better quality of life. However, the main trouble in developing myoelectric based control interfaces lies in identification of patterns in sEMG signals. Figure 1 shows the traditional block diagram of sEMG system for pattern recognition.
The paper is organized as follows. “Related Work” section describes literature review. “Dataset description” section provides details of the dataset used for analysis. “sEMG denoising using DWT and FMH” section summarizes the denoising process using DWT and FMH filters. The features obtained from sEMG signal are described in “Feature extraction” section. “Classification” section explains the neural network architecture used for analysis. The experimental results are presented in “Results and discussion” section. The denoising and subsequent pattern recognition are compared while using DWT and FMH techniques. Finally, the work is concluded in “Conclusion” section.
Related work
Noise removal using wavelets is implemented for filtering physiological and various other kinds of signals [12, 13]. It is used significantly in extracting fetal QRS from abdominal ECG [14]. This technique is favoured in comparison to frequency domain filtering as it can preserve signal properties while decreasing noise. The use of Fourier analysis to investigate biological signals such as EMG recordings is not an effective way for analysis of transient data. However wavelet based time frequency analysis suitably tackles the non-static characteristics of EMG signals. The most commonly used wavelets for filtering biomedical signals are Daubechies (db2, db8, and db6) wavelets and orthogonal Meyer wavelet. This is due to the reason that shape of these wavelets is quite similar to motor unit action potential (MUAP). Four levels of wavelet decomposition depict improved performance in the analysis of EMG signals [13]. The wavelet coefficients act as features of biological signal. Few good wavelet functions that are widely used and appropriate for EMG signal analysis are described in [13]. The real time myoelectric pattern recognition carried out using wavelet denoising is significantly better as compared to conventional band pass filtering [15].

General block diagram of pattern recognition system.
Further non-linear filters like median filter are capable of preserving edges and noise reduction simultaneously. The main characteristic of this kind of filtering is to eliminate high frequency noise such as impulses while retaining the edges of original signal. This technique is also referred as 2-dimensional signal processing and widely used in acoustics & speech and signal processing. This is a nonlinear filtering technique and recently it is also being used in image processing [16].
Signal conditioning is an important aspect [17, 18] in sEMG analysis for subsequent operations like feature extraction, peak detection, classification etc. In case of sEMG signal classification multiple strides are made while using new and effective techniques. In [19], 3 additional time domain features are proposed for efficient limb movement classification. In [20] support vector machine is used with different kernel functions like quadratic, RBF and polynomial on same data. The classification performance revealed that best performance was exhibited by RBF kernel function with sigma = 1. Comparative analysis between the performance of SVM and KNN classifier in EMG signal classification is discussed in [21, 22]. Artificial neural network with different algorithms [23, 24] are also employed to identify various hand actions of subjects using EMG signal. The application of two different back-propagation algorithms namely, Levenberg-Marquardt [25] and scaled conjugate gradient, yielded better results with a mean classification success rate of 88.4%.
The clinical application of electromyography motivates for the present work. Therefore discrete wavelet transform (DWT) and a threshold method are used to remove noise from surface EMG signals. The advantage of using a basic wavelet function is that it has continuous derivatives for effective decomposition of a continuous function. It also has the capability to avoid undesirable signals. In the present work db2 wavelet is considered for analysis. The denoising performance of DWT is compared with FIR Median hybrid filter for sEMG signals. The filtered signals are then given to a classifier and physical action performed by the subject is detected. Multilayer perceptron neural network employed for classification purpose is made up of input layer for features, tan-sigmoid hidden layer and linear output layer for classes. Levenberg-Marquardt learning algorithm is utilised due to its superior performance in training moderate size feed-forward neural networks [24].
In the present analysis, 160 EMG signals are acquired from EMG physical action dataset available on UCI Machine Learning Repository [26]. It comprises 10 aggressive and 10 normal physical actions that determine activities of human. Muscles in different parts of body produce these EMG signals while performing different body actions. They are recorded using Delsys wireless EMG apparatus. 8 electrodes are employed for data acquisition, each of which corresponds to an individual input time series containing about 10000 samples for a muscle channel (ch1-8).
In this work gesture classification algorithm is implemented to classify the physical actions such as bowing, clapping, handshaking and hugging of a normal person and the actions are assigned as class-1, class-2, class-3 and class-4 respectively. The main experimental lab has an area of 4×5.5 sq.m and the performance is registered by Delsys EMG apparatus, which interfaces human activity with myoelectrical contractions. The data collection procedure includes eight skin-surface electrodes which are placed on upper legs and upper arms.
The EMG signals in the physical action data sheet are segmented and filtered using various techniques for improved classification and productive analysis. After segmentation various statistical features like mean absolute value, root mean square value, standard deviation, waveform length and slope sign change from each EMG signals are extracted using MATLAB for different body postures of a normal person.
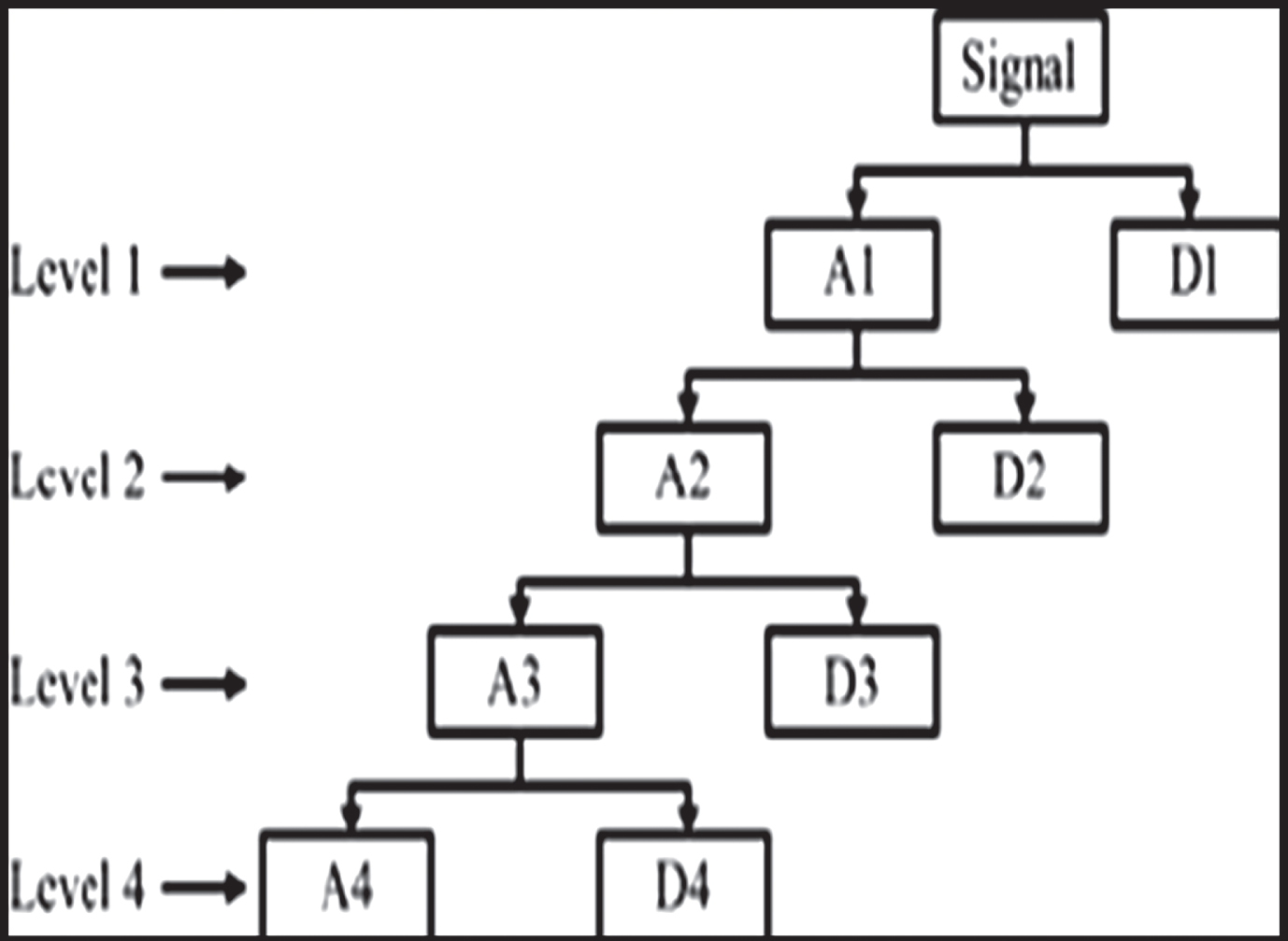
Wavelet decomposition tree for 4-level decomposition.
EMG signal recording is relatively less known and recent, however there are constraints in detection and characterization of current non-linearities in surface electromyography. An unfiltered and unprocessed signal consisting of superposed MUAPs is called a raw EMG signal. The EMG signals have low amplitude typically in the range of mV, which is generally spoiled due to motion artifacts, inherent noise of electronic equipments, ambient noise and noise due to ECG signals. Thus obtaining good quality electrical signals from EMG source is very difficult.
Discrete wavelet transform
The basic idea behind wavelet denoising algorithm is that any noisy signal can be decomposed using wavelet transform (DWT) in which wavelets are discretely sampled and produce detail (cD) and approximation (cA) coefficients. The noise usually falls in detail coefficient component and hence can be reduced by calculating the threshold value (THR) by taking noise variance into consideration. This can be applied to cDs using the requisite transformation. The denoised signal can be reconstructed with the help of approximation coefficients and modified detail coefficients. This technique is applied to noisy sEMG signals using 4-level decomposition and the corresponding decomposition tree of DWT is shown in Fig. 2.
It is observed that conventional universal (UNI) method for thresholding is more appropriate than classical techniques but the corresponding THR is too large. This makes UNI method unsuitable for EMG signals particularly for recognition tasks as it distorts the basic physiology of signal in addition to removing a portion of noise [27]. The conventional UNI method makes use of a fixed form threshold [28], which can be indicated as:
The weight parameter (w) or pre-factor, is incorporated to ensure minimal impairment of resolution of EMG signal after denoising. The value of pre-factor generally lies in the range 0.05 to 0.95 with incremental step of 0.05. The modified THR value can thus be calculated as:
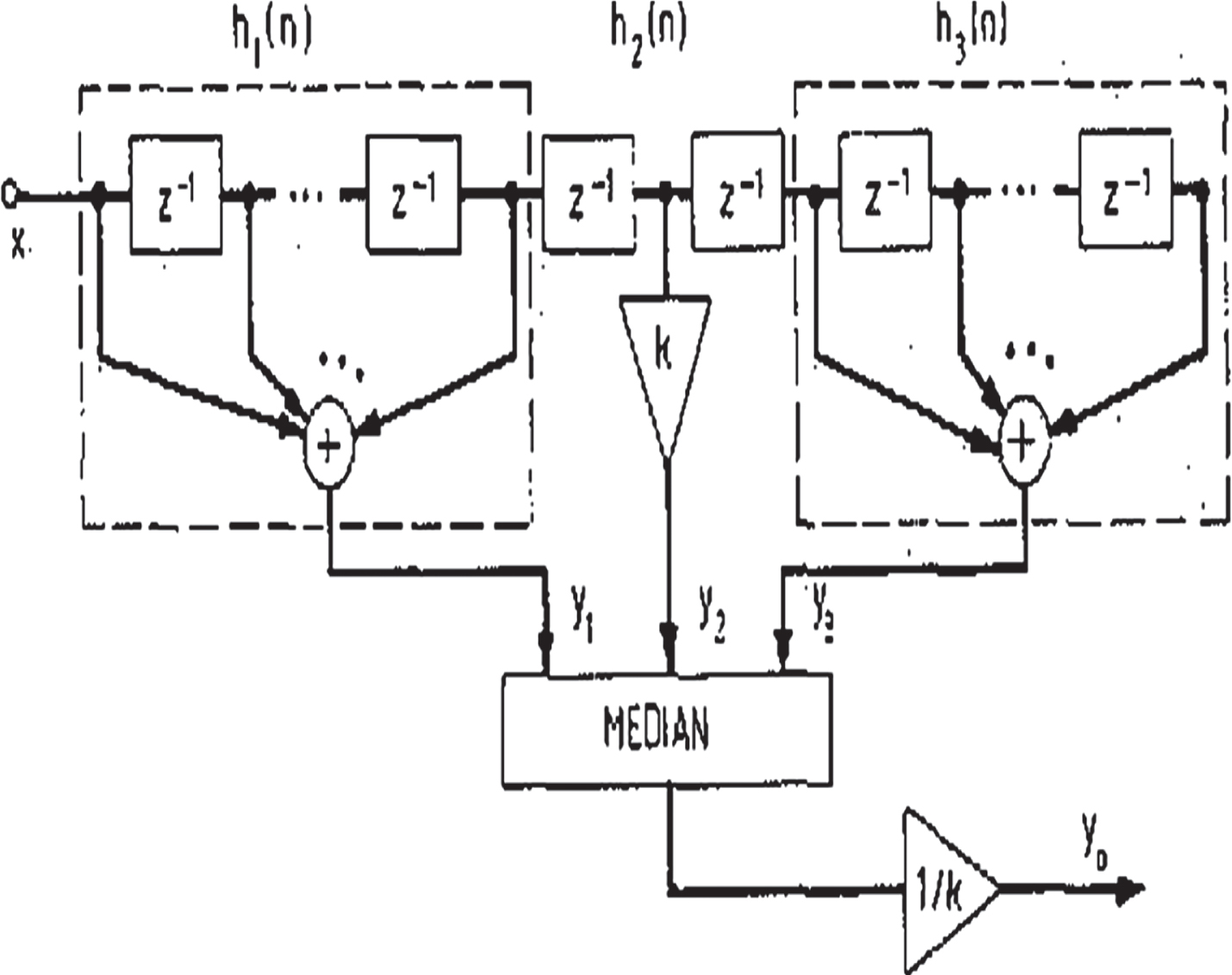
General structure of FIR-median hybrid (FMH) filter.
FIR-Median filtering uses the properties of median filter as well as FIR sub-structures. These kinds of filters are especially successful in eliminating impulsive noise as they retain sharp changes in signals. The standard median filtering selects the median of data samples inside a sliding window of definite length and can be mathematically expressed as:
Let (x1, x2, …, x i , …, x N ) be a congregation of N number of samples where N = 2k + 1. The median can then be represented by y which is calculated by finding median of the set (x1, x2, …, x N ). At fundamental level, the application of a median filter requires simple nonlinear operation but it becomes complex when amount of samples is fairly large, as sorting becomes more time consuming. Therefore the functionality of median filters is utilized along with FIR substructures to reduce the sorting time as median is computed over outputs of FIR substructures. Further the amount of FIR substructures is much less than data samples inside the filter window which leads to FIR-Median Hybrid Filter [29].
In this work M = 3 and substructures having straightforward averaging filters of different lengths are considered. The FMH filter is designed using the following averaging sub-filters:
In each instance, the length of sub filters is decided in such a way that minimal distortion of signal with sharp edges is ensured. The FMH filter is thus computationally more efficient in comparison to standard median filter while retaining its key properties.
Feature extraction is a basic procedure to extract the valuable information hidden in a signal and to eliminate the undesirable portion. Thirty-seven features are obtained from EMG signal, which fall either in time domain or frequency domain category [17]. Generally time domain features are extensively used because of their better performances for signal classification in low noise environments and low computational complexity. The features considered in this work are as follows:
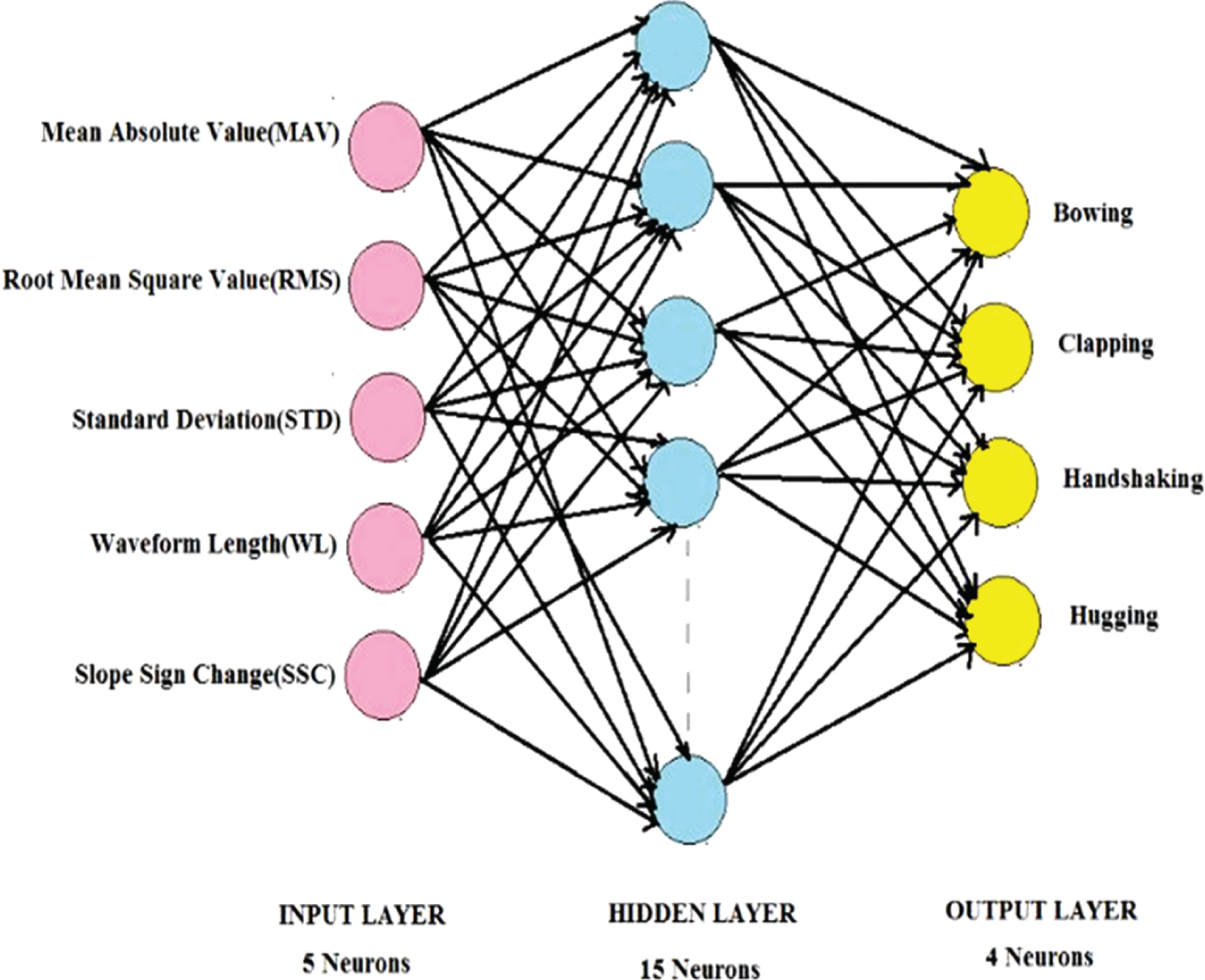
Architecture of ANN implemented as classifier.
Mean absolute value (MAV):
Root mean square (RMS):
Standard deviation (SD):
Waveform length (WL):
Slope sign change (SSC):
The multilayer neural network based on Levenberg–Marquardt algorithm is considered for classification of hand motion commands from sEMG signals. It is revealed from the literature that classification accuracy of artificial neural network depends on the selection of proper feature set, network structure, and training algorithm. The Levenberg-Marquedt (LM) algorithm is a fundamental and robust technique for estimating a function. It is an iterative approach to minimize a multivariate function that is represented as the sum of squares of non-linear real-valued functions. LM may be considered as amalgamation of steepest descent and Gauss-Newton method [24]. Therefore in the present work conventional LM algorithm is used for minimization of loss function.
The network has input layer, tan-sigmoid hidden layer and linear output layer. Selecting the number of neurons in hidden layer is a very important step in the design of overall neural network architecture. It is confirmed during simulation that weights connecting hidden layer to output become small as number of hidden neurons increases. Further a trade-off in the learning stability between input-hidden layer and hidden-output layer connections exists. Using very few number of neurons in the hidden layers leads to the improper adjustment of weight and biases in the network during training, which is called as under-fitting. Increasing the number of hidden neurons beyond a certain extent may degrade the accuracy of network. It ideally requires huge memory to save large number of network variables and therefore training process becomes complex. The appropriate count for the neurons in hidden layer is decided so as to trade-off efficiency and complexity of the network. There is no thumb rule to decide the number of neurons in the neural network. However various researchers have devised some formulae for the purpose [24].
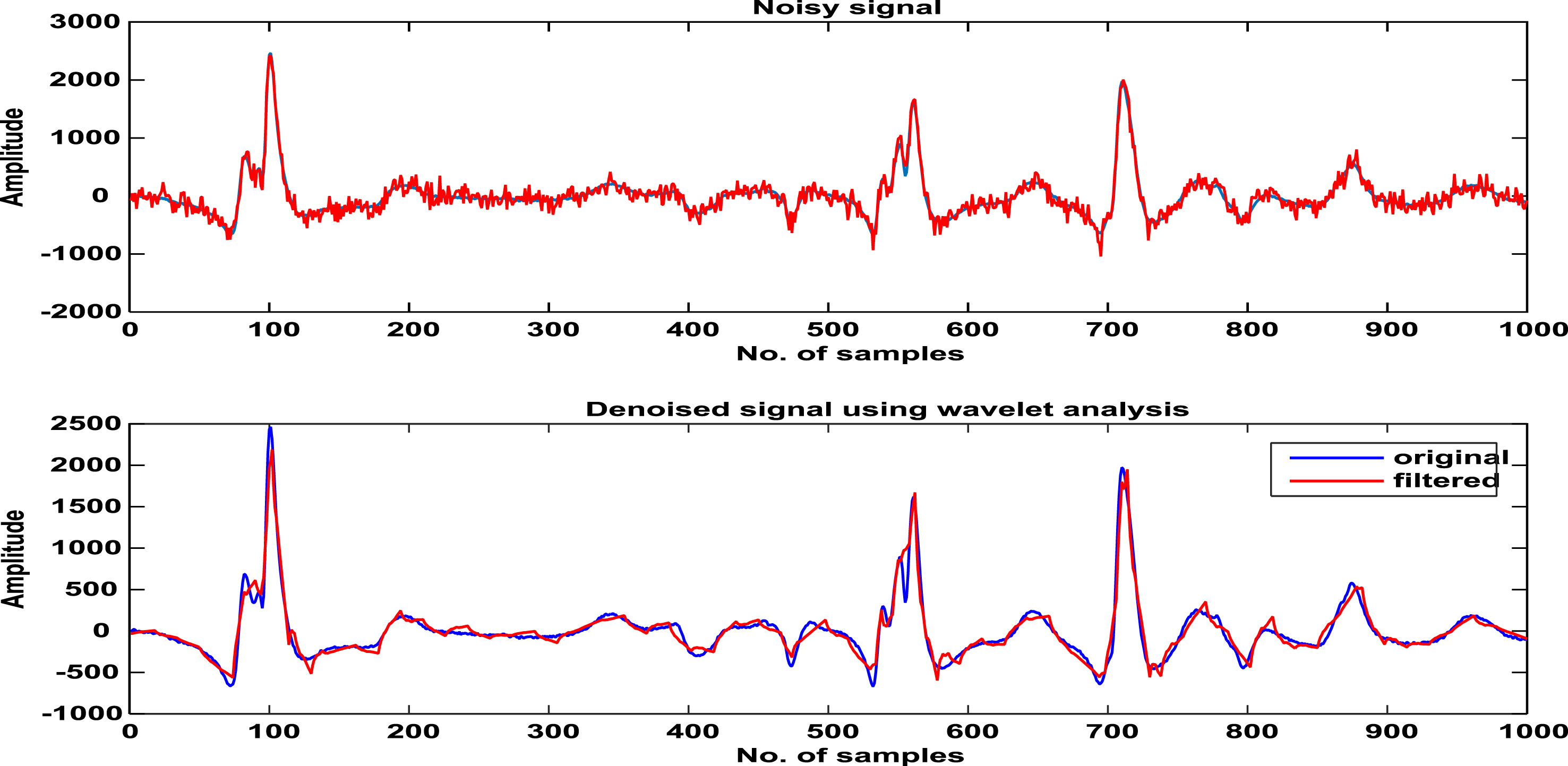
Filtered sEMG signals using DWT technique.

Filtered sEMG signals using FMH technique.

(a) EMG signal produced by bowing. (b) EMG signal produced by clapping.
In the present work trial and error approach is used for selection of neurons in the neural network. Initially less i.e. 5 hidden neurons are considered which are increased to 20. Neural network with 5 hidden neurons show under-fitting and 20 hidden neurons express over-fitting whereas 15 is found to be the optimal number of hidden neurons. 5 neurons are considered in the input layer corresponding to 5 input feature and 4 output layer neurons represent four classes. Therefore in this work ANN has 5-15-4 architecture as shown in Fig. 4. The back-propagation algorithm is used during training so as to adjust the weights and biases while minimizing mean squared error between target and neural network output [25].
The sEMG signals corresponding to different body postures are acquired and filtered using FMH and DWT filters to remove noise. 160 sEMG signals from physical action dataset are considered in this work. The performance of filters is compared on the basis of SNR, MSE and RMSE. Four level wavelet decomposition is performed. Each level is calculated using wavelet approximation coefficients from the previous level discrete time quadrature filters like low pass and high pass filters. For FMH, a median filter with 3 FIR-substructures is used.
The simulations are performed on PC in MATLAB environment. The specifications of PC used are Intel®CoreTM i5 CPU M350@2.27GHz with 4GB RAM. Since standard EMG signals are not easily obtainable, the first step is to extract signals using Waveform Database (WFDB) Software Package. Cygwin terminal is installed on the system since WFDB is a Unix based library. Further work including smoothening, peak detection and classification of EMG signals is performed in MATLAB.
White Gaussian noise also called as shot noise is added to simulated sEMG. This is a type of electronic noise which can be modeled by a Poisson process. The Poisson distribution approaches normal distribution about its mean for large numbers. Thus elementary events like photons, electrons, etc. are no longer individually observed, which typically makes shot noise indistinguishable from true Gaussian noise in actual observations. In this work median filter removes the shot noise present in sEMG signals more effectively than wavelets.

Error plot of filtering noisy signal (10db SNR).

MSE for classification after denoising with (a) DWT and (b) FMH filter.
The filtered sEMG signal using DWT and FMH technique are shown in Figs. 5 and 6. It is revealed from the results that FMH has better filtering performance as compared to DWT. In Fig. 7, EMG signals produced from physical actions like bowing and clapping are depicted. These signals are taken from UCI dataset and filtered with DWT and FMH filters. The error plot of FMH and DWT filtered signals for 10db SNR noisy signal is shown in Fig. 8. The mean squared error is quite important for relaying the concepts of precision, bias and accuracy during statistical estimation. The difference between reference signal and filtered signal is defined with the help of mean of squared error and is given as:
The observation is also verified using Root Mean Square Error (RMSE). RMSE is a quadratic scoring rule that measures the average magnitude of error between reference signal and filtered signal.
The SNR, MSE and RMSE of denoised signal are calculated and values for few filtered sEMG signals are given in Table 1. It is observed from quantitative comparison that FMH filters the sEMG signal with 13.486dB SNR whereas DWT has 11.515dB SNR. Thus FMH filters the signals more effectively. The filtered signals are then passed to the classifier.
SNR, MSE and RMSE values of filtered signals
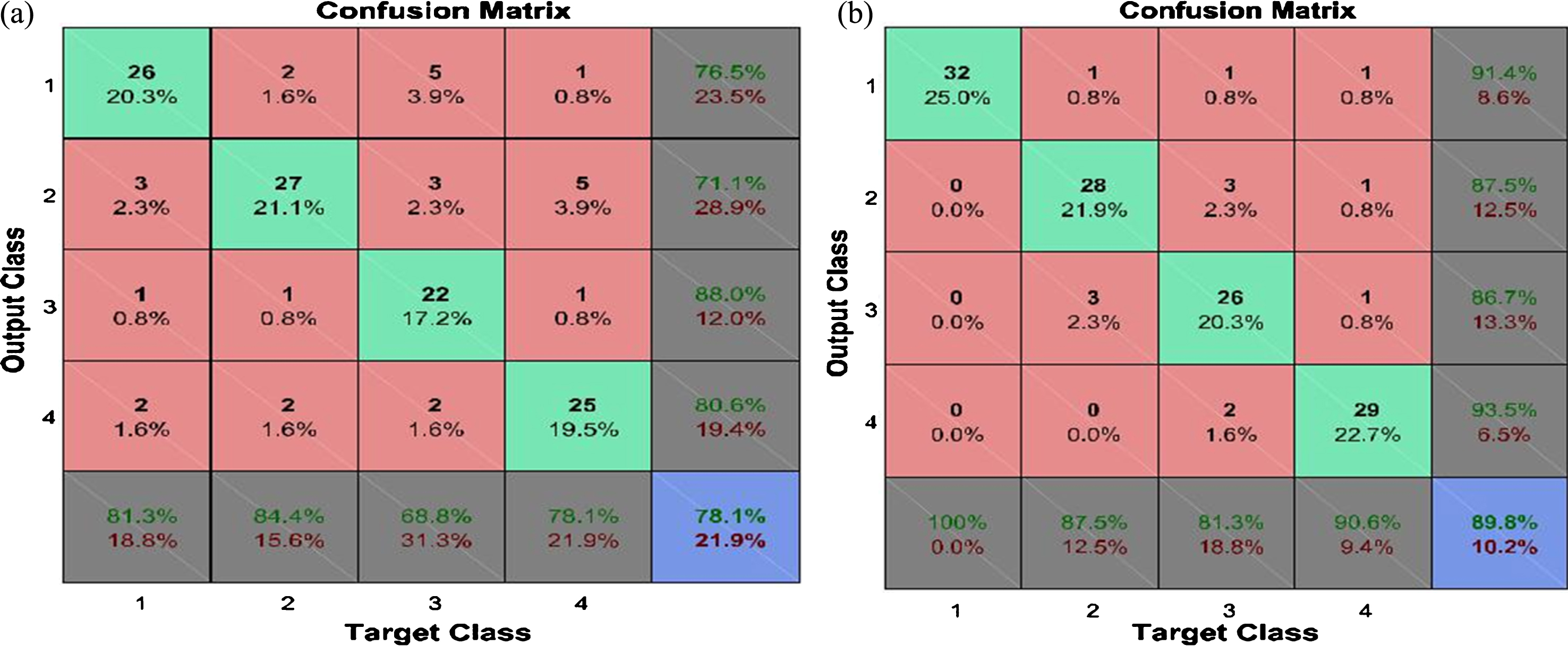
Confusion matrix for classification after denoising with (a) DWT and (b) FMH filter.
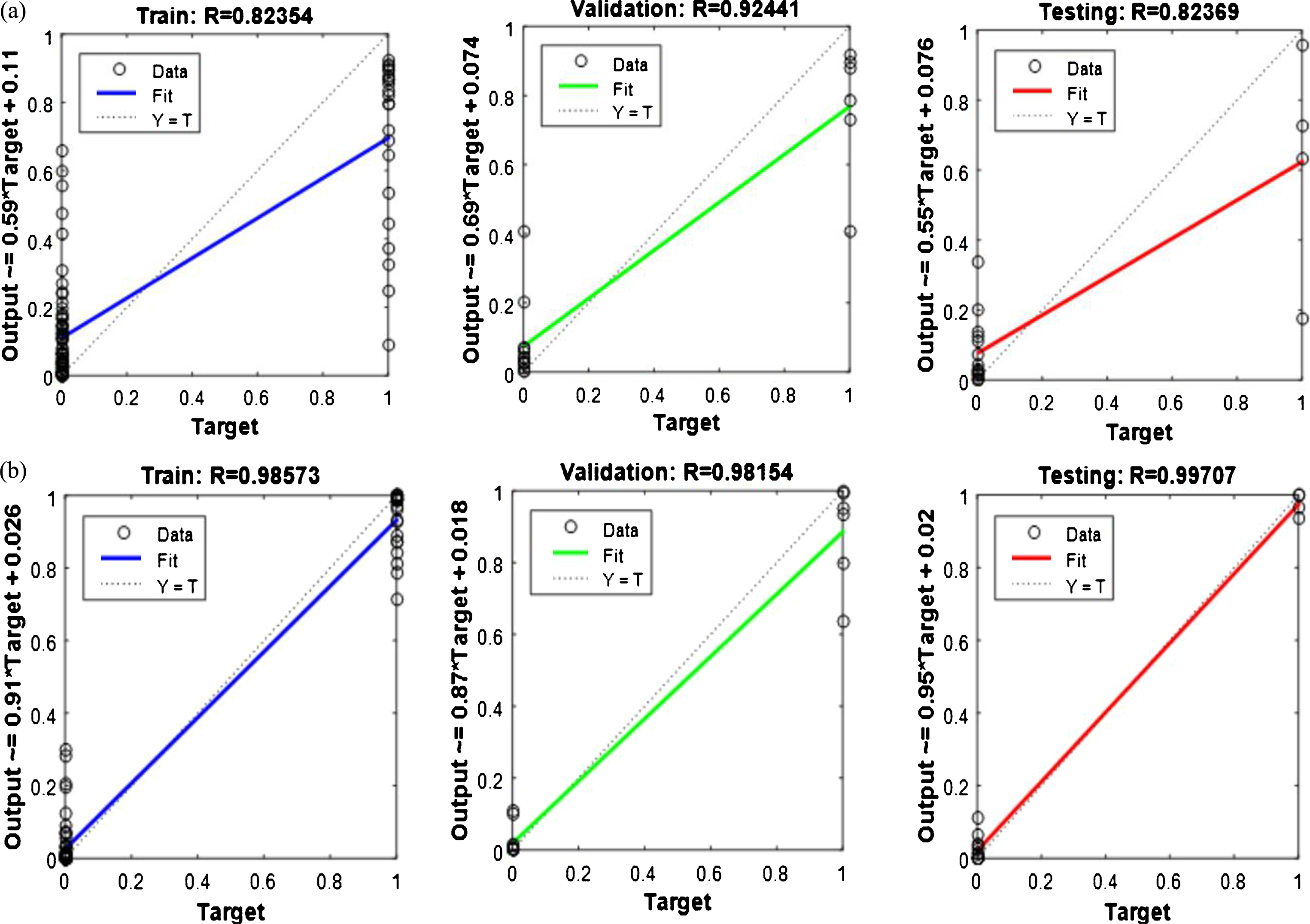
Regression plots for classification after denoising with (a) DWT filter (b)FMH filter.
After denoising, the sEMG signals are classified using artificial neural network to classify the hand motions. 70% of data is taken for training, 15% for testing and 15% for validation from the complete dataset. The classification performance is evaluated using mathematical analysis. Extraction of features is an important step to separate useful data from unwanted interferences. The choice of feature vectors needs to be precisely examined for successful classification. Time domain features are supplied to classifier because of their efficient performance in low noise surroundings and less computational cost.
Mean absolute value, root mean square value, standard deviation, waveform length and slope sign change are the inputs to model which produce one out of the four classes as output i.e. bowing, clapping, handshaking and hugging. In this work, numerical optimization technique based Levenberg–Marquardt algorithm is utilized for the purpose.
Figure 9 shows the MSE of classification for filtered sEMG signals. The MSE obtained for FMH filtered signals is lesser than DWT filtered signals. Thus performance of classifier is better when signal is filtered with FMH. The observation is validated using confusion matrices in Fig. 10 and regression plots in Fig. 11 for EMG signals filtered by FMH and DWT filters respectively.
It is evident from confusion matrices that classification rate after de-noising by FMH filter is 89.8 % whereas for DWT de-noised signal it is 78.1%. The MSE for regression plots recorded in Table 2 also verifies the better performance of FMH as compared to DWT. Thus FMH is more efficient in removing noise from sEMG signals.
MSE for regression plots
This paper focuses on sEMG-based detection of hand motion instructions for myoelectric prosthetic arm. The noisy sEMG signals are first filtered using DWT as well as FMH filters. The effect of filtering technique on correct classification of signal is then analysed. The effectiveness of filters is verified on the basis of SNR and RMSE plots. It is observed that FMH preserves the original signal more efficiently besides removing the noise as compared to DWT. Further, the observations are confirmed by classifying filtered signals using LM based ANN. The results of classification confirmed the fact and a performance accuracy of 89.8% is achieved with FMH filter which is more than DWT de-noised signal. Hence it is concluded that FMH filter removes the noise more effectively and thus increases the classification accuracy.