
Abstract
Stability of a parallel manipulator is a very important issue due to its high nonlinearity and vague dynamics. This problem may be overcome by a controller, based on the combination of Lyapunov theory and fuzzy logic. In this paper a novel linguistic Lyapunov based fuzzy controller (LLFC) is proposed in which fuzzy logic controller improves trajectory tracking performance of parallel manipulator and application of Lyapunov theory provides stable control action. The subsequent part of rule base in fuzzy controller is constrained by Lyapunov criteria so as to generate a control action which stabilizes the system. Non dominated sorting genetic algorithm–II (NSGA-II) optimization technique is used to evaluate the optimal values of controller parameters. The effectiveness of proposed LLFC controller is tested on Maryland manipulator and compared with PID, Fractional order PID (FOPID) and Fractional order fuzzy pre-compensated fractional order PID (FOFP FOPID) controllers. Simulation results reveal that the proposed controller shows stable, robust and better tracking performance for Maryland manipulator in comparison to PID, FOPID and FOFP FOPID controllers.
Introduction
In the last two decades parallel manipulators have gained a remarkable attention of researchers due to its high load capability, excellent inelasticity, good driving performance and efficient energy utilization [1]. Stewart platform is the most commonly used parallel manipulator also called as six limbed parallel manipulator designed by Stewart in 1965 [2]. Its direct kinematics is difficult to explain and hardware realization of spherical joints used in this configuration is also difficult. Further position and orientation of the moving platform are coupled which causes change in orientation, when only position is changed and vice versa. The shortcomings of six limbed parallel manipulator are overcome in Maryland manipulator invented by L.W. Tsai [3]. It has closed-form direct and inverse kinematics solution which uncouples the position and orientation of moving platform. The workspace, in case of Maryland manipulator is larger than Stewart platform and it has only revolute joints instead of expensive and less precise spherical joints.
Parallel manipulators are extensively used in many industrial applications such as aircraft simulator, machine tools, micro motion, milling machines, and pick-and-place operation [4–7] etc. All these applications require high speed, acceleration and accuracy. The manipulator also finds application in medical field e.g. back and forth translational motion of parallel manipulator is used in cardiopulmonary resuscitation (CPR), the chest compression operation [4]. Furthermore, the actuators in parallel manipulator are placed on or near the base which results in very low inertia of moving part and increases the efficiency of manipulator. Due to this reason parallel manipulators are widely used in air craft simulator and fast pick and place operations [8]. However, high non linearity and complex motor mechanism causes challenges in trajectory tracking control of parallel manipulators [3–9].
Various control strategies for trajectory tracking control of parallel manipulator are discussed by several authors. Ghorbel et al. [10] proposed a reduced model approach based on closed chain mechanism for delta robot. Further proportional derivative (PD) controller is applied with simple gravity compensation for stability of robot. Liping et al. [11] designed a feedback fractional order PD controller and feed forward compensation controller for parallel manipulator which ensures stability and robustness of the system. The results revealed the superiority of proposed controller over feedback PD and FOPD controllers without feed forward compensation. Ouyang et al. [12] designed a nonlinear proportional derivative (NPD) controller for trajectory tracking control of a 2-DOF parallel manipulator. It is observed from the results that tracking accuracy of NPD controller is better than PD control scheme.
In different industrial applications PID controller is still a primary choice owing to its simple structure, execution and easy tuning capability. But it suffers from few limitations i.e. error calculation, noise accumulation in derivative control, complications due to integral control, over-simplification and degraded performance in control law due to linear weighted sum. Intelligent techniques such as neural networks, fuzzy logic and their hybrids have emerged as a boon for researchers in nonlinear control engineering field. Among intelligent techniques, fuzzy logic controller has been the prior choice in industries to enhance the capability of a machine [13, 14]. Li and Wang [15] introduced self-tuning capability by combining diagonal recurrent neural network (DRNN) and conventional PID controller named as neural network PID (NNPID) controller for trajectory tracking control of a redundantly actuated parallel robot. Results show that NNPID improves the trajectory tracking in comparison to conventional PID controller. Lim and Hiyama [16] proposed a combination of PI and fuzzy logic controllers for 2-DOF robotic manipulator. The combination provides efficient performance as advantages of both the controllers are utilized. Simulation results prove efficacy of proposed controller in terms of trajectory tracking, parametric uncertainty and disturbance rejection. Mohan et al. [17] designed a modified adaptive neuro-fuzzy controller (MNFC) by modifying the training data set of adaptive neuro-fuzzy controller. Rigorous simulation study revealed the superiority of controller in comparison to fuzzy, GA based fuzzy, adaptive neuro-fuzzy controller and linear quadratic regulator.
Trajectory tracking control of Maryland manipulator is relatively less explored due to nonlinear, vague and complex dynamics. To the best of author’s knowledge only Dumlu [18] designed trajectory tracking controller for Maryland manipulator using PID and FOPID schemes. Recently A. Kumar and V. Kumar [19] proposed fractional order fuzzy pre-compensated fractional order PID (FOFP FOPID) controller for trajectory tracking control of robotic manipulator. However, these previously designed control schemes do not consider stability of the system while tracking the trajectory. The stability of a manipulator is one of the challenging issues for accurate trajectory tracking but the prevalent control schemes fail to attain the required stability. This issue motivates the authors to use Lyapunov stability theory along with fuzzy logic controller for efficient trajectory tracking control of parallel manipulator.
Hence, in this work, a novel linguistic Lyapunov based fuzzy controller (LLFC) is proposed by incorporating Lyapunov stability condition (LSC) with fuzzy controller for stable & precise trajectory tracking control. Incorporation of LSC ascertains the stability and fuzzy logic control scheme enhances the tracking performance of manipulator [14–20]. The designed control strategy is tested on highly nonlinear and less explored Maryland manipulator. The parameters of designed controller are optimized using nondominated sorting genetic algorithm-II optimization technique. Trajectory tracking and disturbance rejection performance analysis is carried out for designed controllers. The supremacy of proposed controller is verified by comparing it with traditional PID, Fractional order PID [18] and recently proposed FOFP FOPID controller [19]. The paper is organized as follows; Section 2 discusses mathematical modeling of parallel manipulator. The design of Lyapunov based fuzzy controller is explained in section 3.Section 4 describes non-dominated sorting genetic algorithm-II. Results are discussed in Section 5 followed by conclusion in section 6.
Mathematical modelling of Maryland manipulator
Maryland manipulator (Fig. 1) is a 3 degree-of-freedom parallel manipulator devised by Lung-Wen Tsai at the University of Maryland. It consists of 3 identical limbs connecting the moving platform (M) to the fixed base (S). Each limb is composed of input link (UV) and a four bar planar parallelogram which acts as a passive link (VW). These passive links restrict the motion of moving platform to only translational degree of freedom as explained in [9]. In each limb three revolute joints connect base, input links, passive links and moving platform. Further each passive link comprises four revolute joints thus in total seven revolute joints are present in each limb. The description of joint angles of manipulator is given in Fig. 2 and design parameters are given in Table 1, where i = 1, 2, 3 represents limb-1, limb-2 and limb-3 respectively.

Schematic diagram of 3-DOF Maryland manipulator.
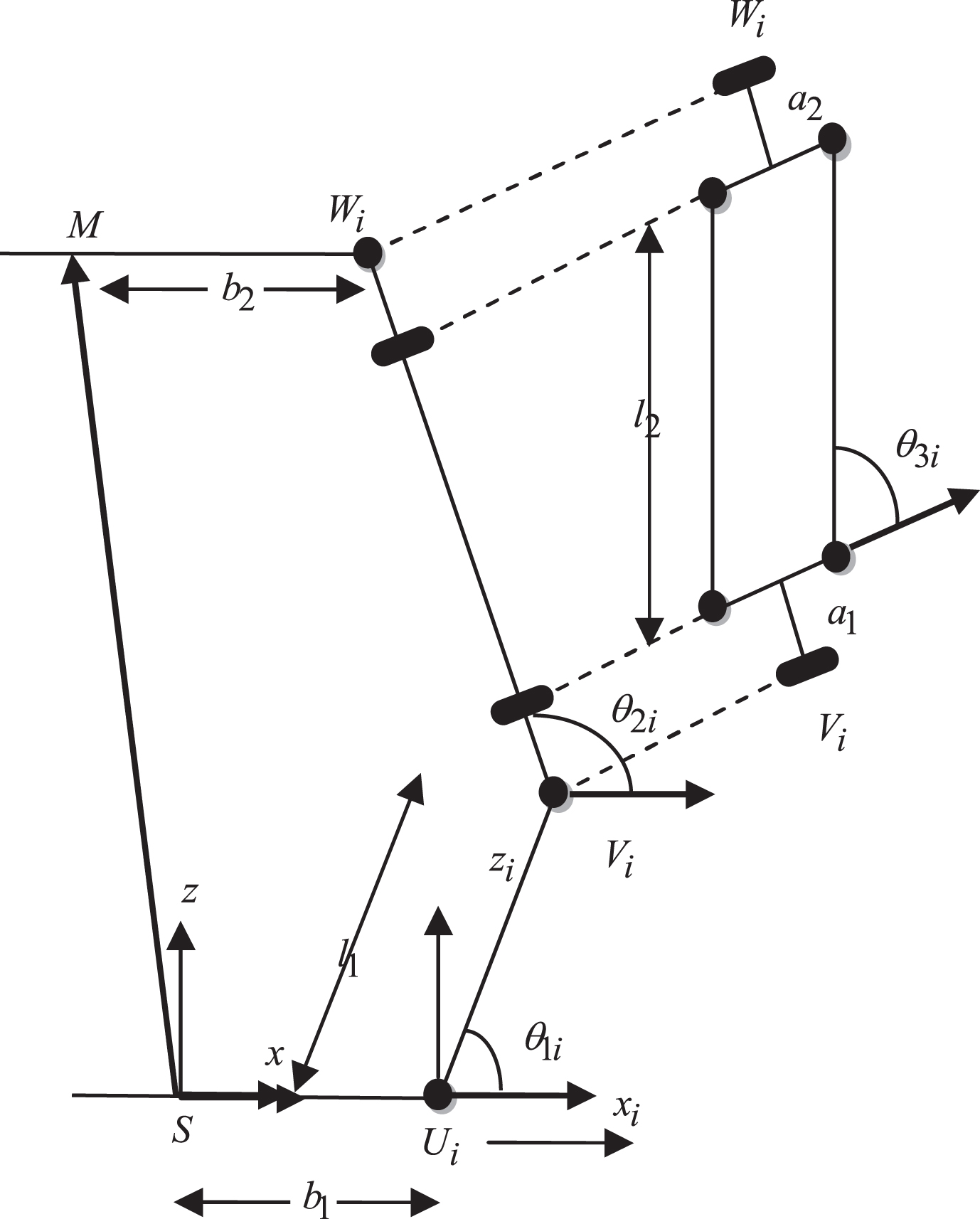
Description of joint angles.
Design parameters of Maryland manipulator
The actuators are located at points U i (i = 1, 2, 3) on fixed platform. The reference coordinate system (x, y, z) is assumed to lie at the center S of fixed platform. The xy-plane lies on fixed platform and z-axis is at right angle to fixed platform. Further, a coordinate system (x i , y i , z i ) is considered at U i on fixed platform, such that z i -axis is same as z-axis, extended line of SU i is treated as x i -axis and the revolute joint axis at U i is treated as y i -axis.
In this work a special case of Maryland manipulator with a1 = a2 = 0 is considered. This assumption simplifies the dynamic modeling of manipulator. Further, inverse kinematics is utilized to determine the joint angles which gives coveted posture to the moving platform as it is difficult to obtain the forward kinematics of parallel manipulators.
Lagrangian mechanics is used to describe the dynamics of parallel Maryland manipulator. The mass of each interfacing rod in the passive link is assumed to be m b and concentrated equally at end point of connecting rod of length l2 i.e. m b / - 2 at each end of the connecting rod of length l2.
A closed-loop equation may be written for each limb as:
In general, the Lagrange multiplier approach involves the following equations:
The potential energy of manipulator system is given by:
In this work, Lagrange multipliers are used with three generalized coordinates θ11, θ12, θ13 and three redundant coordinates M
x
, M
y
, M
z
. f
i
(i = 1, 2, 3) is the external force exerted on the moving platform for ith limb and is considered to be zero for Maryland manipulator. τi-3 (i = 4, 5, 6) denotes the frictional torques of the (i - 3)
th
limb in θ1(i-3)-direction. Redundant coordinates are used to evaluate the Lagrange multiplier which are further used to calculate the required torque. The constraint equations relating M
x
, M
y
, M
z
and θ11, θ12, θ13 for each limb are obtained by considering the distance between joints V
i
and W
i
equal to the length of connecting rod of passive link (l2) always (special case); i.e.
The dynamic equation of manipulator is then obtained in the following form:
Assuming external force exerted on the system to be zero, three unknown Lagrange multipliers λ1, λ2 and λ3 can be calculated using i = 1, 2, 3 in Equation (2). Once the Lagrange multipliers are found, the actuator’s torque is obtained as follows:
The permanent magnet direct current (PMDC) motor is used to provide desired torque (Equations (9 to 11)) by varying the supply voltage. In the present work three PMDC motors are mounted at position U
i
of active links. The governing parameters of actuators are listed in Table 2. The dynamic equations of PMDC motor, which drive the limbs of Maryland manipulator, are as follows:
The actuator torques are obtained by replacing load torque (T L ) in equation (13) with τ1, τ2 and τ3 for limb-1, limb-2 and limb-3 respectively.
Parameters and their nominal values for PMDC motor
Trajectory tracking control of parallel manipulator is a benchmark problem [3–9] and considered for the present work. Recently fractional order fuzzy pre-compensated fractional order PID (FOFP FOPID) controller is implemented [19] on robotic manipulator which provides precise tuning and variations in the response are reduced. However in this work a linguistic Lyapunov based fuzzy (LLFC) controller is proposed for the desired control of Maryland manipulator to address the issues related to robustness and stability. The effectiveness of proposed LLFC controller is verified in reference to the recently implemented FOFP FOPID controller. The conventional PID controller is also designed for comparative analysis.
Fractional order fuzzy pre-compensated fractional order PID controller
A recently developed FOFP FOPID controller is realized for comparative study. This control scheme cascades fractional order fuzzy pre-compensator and fractional order PID controller. Cascading controller with pre-compensator enhances robustness of the system and reduces overshoot and undershoots in the transient response [19]. Hence the overall control structure provides precise tuning and reduces variations in the response. The fractional order fuzzy pre-compensated control action may be represented as:
Finally control law of the FOFP FOPID controller for Maryland manipulator is given below:
Rule base used for FOFP FOPID controller is derived from expert knowledge [25].
(R1) If ɛ11 = p AND
(R2) If ɛ11 = p AND
(R3) If ɛ11 = n AND
(R4) If ɛ11 = n AND
The schematic diagram of FOFP FOPID controller is shown in Fig. 3. The input and output membership functions for FOFP FOPID and LLFC controllers are considered to be same.
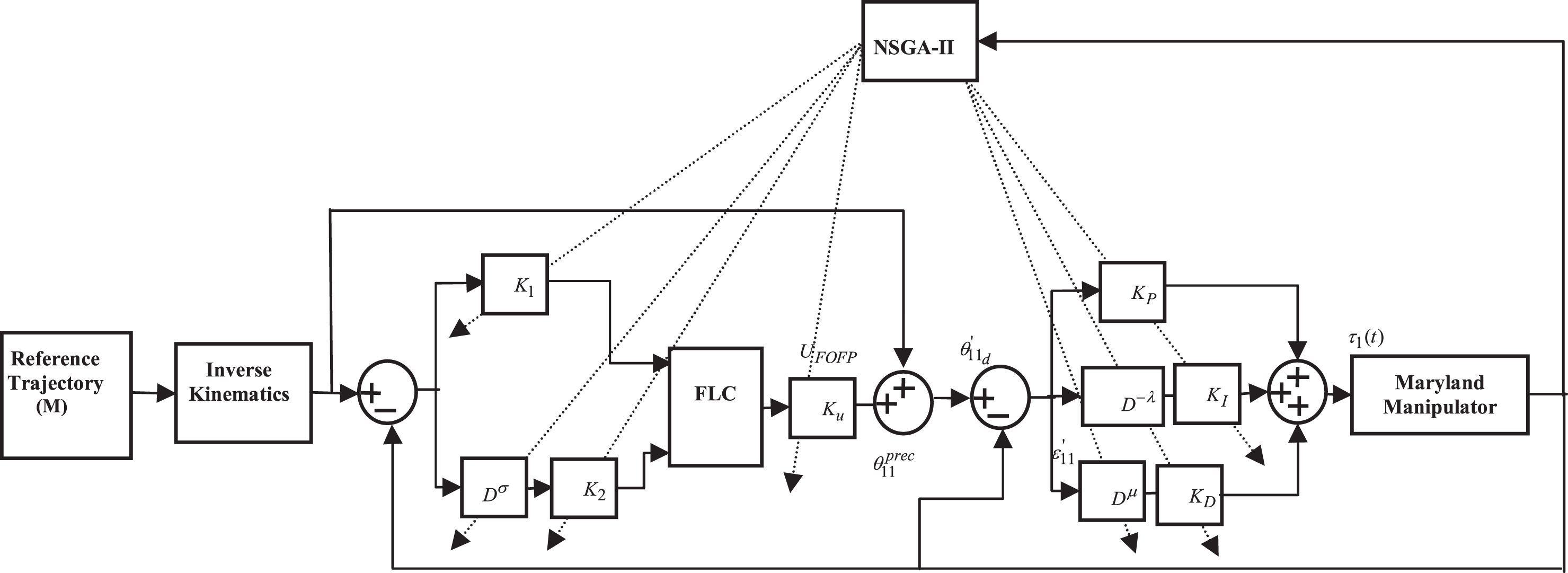
Schematic diagram of FOFP FOPID controller for Maryland manipulator.
In this work linguistic Lyapunov theory based fuzzy controller is designed for trajectory tracking of Maryland manipulator. The use of Lyapunov theory ensures stability of a complex coupled system [21, 22]. A Lyapunov function L (ɛ) is selected, which is positive definite and decreases with time. C1, C2 & C3 conditions must be fulfilled by L (ɛ) to be a Lyapunov function and these conditions are described as follows:
where ɛ = 0 is assumed to be an equilibrium state. A suitable Lyapunov function is required to design a stable controller. The states P & P
d
are considered as actual and desired actuator angle respectively and
For Maryland manipulator
where θ11, θ12 & θ13 and θ11
d
, θ12
d
& θ13
d
are actual actuator angles and desired actuator angles for limb-1, limb-2 and limb-3 respectively. The actual and desired actuator velocities for the limbs are denoted by
In this work decentralized control scheme is used i.e. one controller for one limb and Equation (17) for limb 1 may be rewritten as.
To satisfy condition C3
According to Equation (9),
The term
From Equations (19 & 22) we have
The rule base for fuzzy controller can be explained using Equation (23) for different cases.
Case I: When
Case II: When ɛ11 & ɛ11 have same sign, we get two situations ɛ11 & ɛ11 both are positive. In this case control action must satisfy u1 < - ɛ11 i.e. linguistic control action must be large negative (μn . l). ɛ11 & ɛ11 both are negative. In this case control action must satisfy u1 > - ɛ11 i.e. linguistic control action must be large positive (μp.l).
Thus rule base for the fuzzy controller of limb-1 can be written as:
(R1) If ɛ11 = p AND
(R2) If ɛ11 = p AND
(R3) If ɛ11 = n AND ɛ11 = p THEN LLFC-output =μ zero
(R4) If ɛ11 = n AND ɛ11 = n THEN LLFC-output =μp.l
Where μn.l (x) = e-(x+5)2, μ zero (x) = e-x2 and μp.l (x) = e-(x-5)2. The rule base for other two limbs are also derived similarly using the system dynamics. LLFC controller is designed based on the above equations for trajectory tracking of Maryland manipulator. Figure 4 shows schematic diagram of LLFC controller for Maryland manipulator.
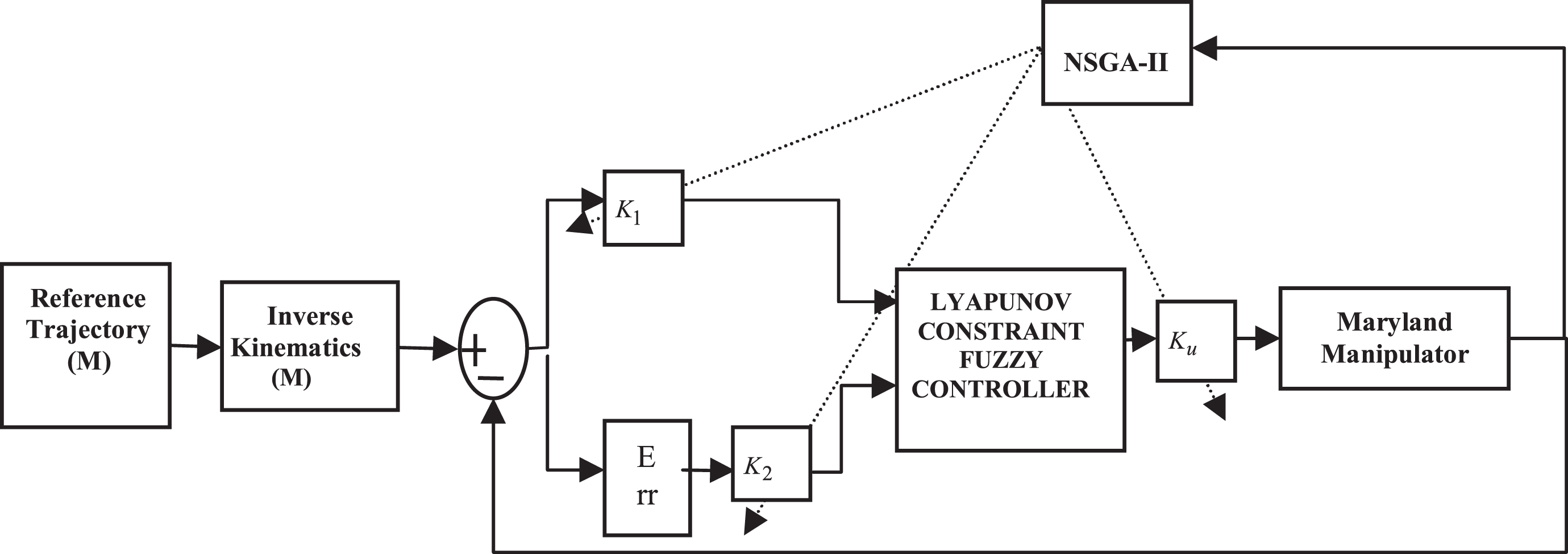
Schematic diagram of LLFC controller for Maryland manipulator.
The principal requirement for efficient execution of any control scheme is the optimization of design parameters. The advancements in the area of optimization techniques provide an effective solution to the problems associated with controller tuning. The single objective optimization improves one objective at the cost of other objectives, thus trade-off between these objectives is necessary [24]. This issue motivates the researchers towards multi-objective optimization techniques. The selection of appropriate objective function is necessary for any optimization problem. The objective functions considered for the present work are:
where τ1 (nT) , ɛ11 (nT) are control signal and error signal respectively for limb-1. The aim is to obtain optimum controller parameters by simultaneously minimizing the conflicting objectives w1 & w2. In this work NSGA-II optimization algorithm [25] is used to optimize the parameters (K1, K2 & K
u
) of LLFC controller. Steps for implementation of NSGA-II algorithm are outlined as: Initialize consistently distributed parent population of size N on the basis of parents range. Evaluate the objectives for individuals and sort the population based on non-domination. Assign every solution a rank, equivalent to its non-domination level. Utilize binary tournament selection process. Apply binary crossover and polynomial mutation operator to produce a next level population of size N. Combine new population with parent to generate extended population of size 2N. This extended population is arranged using non-domination level. Select best population of size N from the sorted fronts.
Redo steps (ii) to (vii) until stopping criteria is achieved. The crowding-distance method is used to assure diversity, if a front can only partially fill the subsequent generation. The crowding-distance method keeps up variety in the population and avoids convergence to local optimum solution.
Simulation results
Maryland manipulator is a highly complex, nonlinear and coupled system under different operating conditions. Thus controller used in trajectory tracking for the manipulator must be stable. In this study a stable linguistic Lyapunov based fuzzy controller is designed. The performance of LLFC controller is analyzed and compared with previously designed PID, FOPID and FOFP FOPID controllers. The mathematical model discussed in Section 2 is simulated using MATLAB on Intel i3 processor with 4GB RAM. In the suggested control scheme, controller provides voltage signal to motor which produces the required torque. The three sequential trajectories under consideration are as follows:
where M x , M y & M z trajectories represent the movement of moving platform in x, y and z direction respectively. These are designed for dynamic analysis of parallel manipulator and their graphical representation is given in Fig. 5 (a), (b) and (c) [18]. NSGA-II provides multiple nondominated solutions instead of a single optimum value. These set of solutions called as Pareto front are plotted graphically as shown in Fig. 5(d). The best solution from set of solutions is the one which optimizes both objective functions simultaneously. The solution highlighted in red colour has minimum value for both the objectives and is thus selected for the current problem.
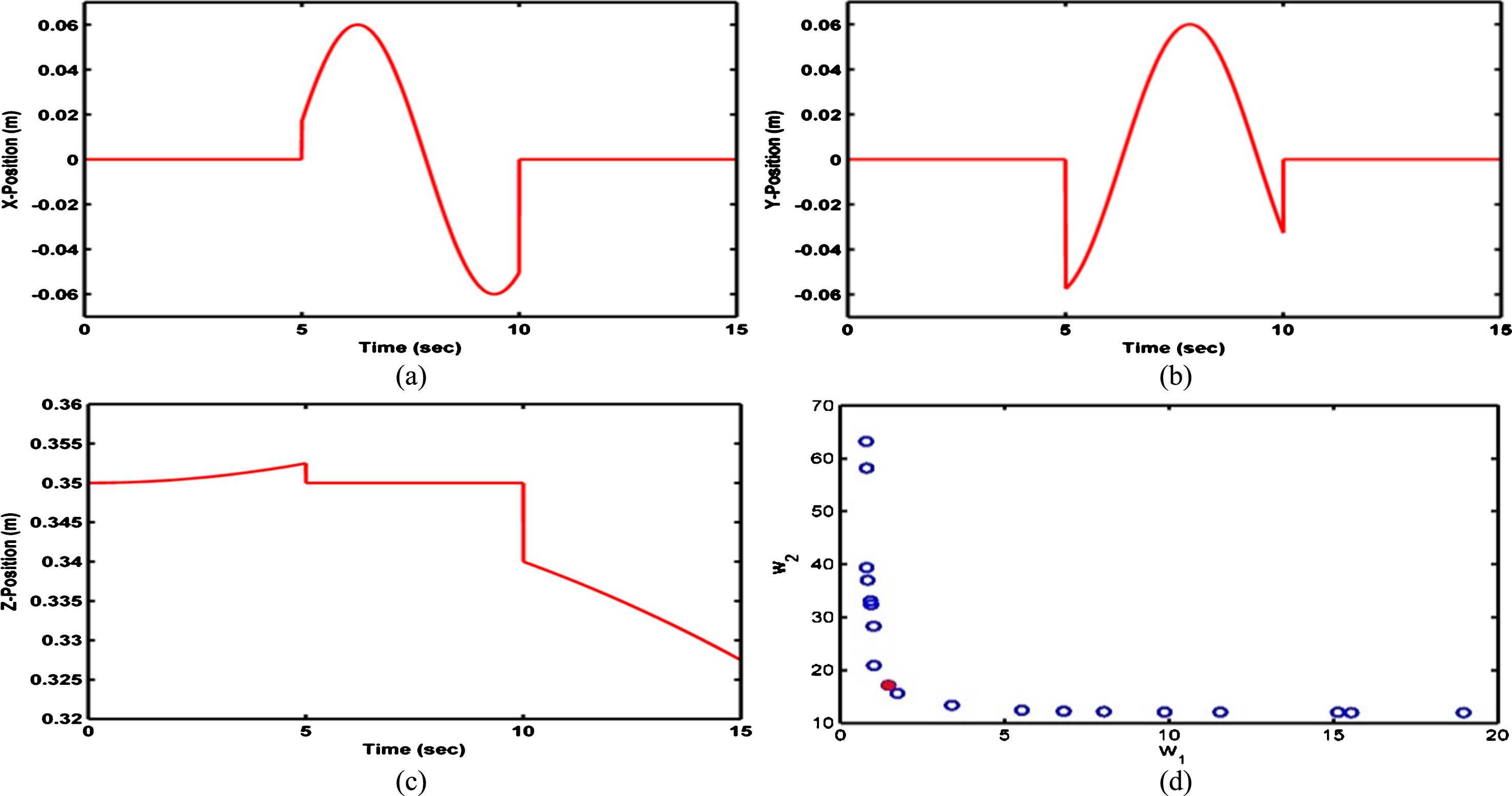
Reference trajectories for (a) x-position (b) y-position (c) z-position of Maryland manipulator and (d) NSGA-II Pareto front for LLFC.
The proposed LLFC controller for Maryland manipulator is optimized using NSGA-II and the controller parameters are given as:
K1 = 0.654, K2 = 0.075 and K u = 2.546
NSGA-II optimized parameters of FOFP FOPID controller for Maryland manipulator are given as:
K1 = 0.538, K2 = 0.156, σ = 0.486, K u = 3.537, λ = 0.236, μ = 0.726, K p = 0.223, K1 = 0.6385 and K D = 0.0429
The gains of PID controller are tuned using pattern search optimization technique [18], and are obtained as:
K p = 0.15, K1 = 0.05 and K D = 0.04
In case of FOPID controller, the tuning technique based on Bode plots proposed by Dumlu [18] is implemented. The gains of FOPID controller are:
λ = 0.5, μ = 0.5, K I = 0.8114 and K D = 0.0502
The performance of designed controllers is examined in terms of sum squared error (SSE).

Tracking performance of designed controllers.
Parameters for FOFP FOPID controller
SSE value for designed controllers
Practically all systems experience unavoidable disturbances which hamper the controller’s performance. In case of robotic manipulators disturbance introduces an additional low frequency torque [26]. Therefore in this work a low frequency sinusoidal torque of varying amplitude is considered as disturbance for robustness analysis of the proposed controller. Different cases of disturbance are considered by varying the amplitude from 0.1 Nm to 1 Nm and sum squared error obtained for each case is recorded in Table 5. Figure 7 shows the variation in SSE values for designed controllers in the presence of various disturbances. It is observed that proposed controller offers less variation in SSE and thus rejects the disturbance more efficiently than other designed controllers. Thus it is revealed from the above analysis that proposed controller provides a stable, robust and tight position tracking of Maryland manipulator.
Quantitative analysis of SSE for sinusoidal disturbance in limb-1
Quantitative analysis of SSE for sinusoidal disturbance in limb-1

Variation of SSE for different types of disturbance.
In this work, linguistic Lyapunov based fuzzy controller is designed and implemented for tracking control of a highly nonlinear 3-DOF Maryland manipulator under disturbances due to cogging and eccentricity of actuator. The combination of Lyapunov criteria with fuzzy controller assures the overall stability of a closed loop system. The optimal values of LLFC controller parameters are evaluated using NSGA-II. The proposed control strategy provides better position control with minimum control effort for Maryland manipulator. The comparative analysis demonstrates that proposed controller is efficient in comparison to other designed controllers in terms of stability, robustness and tracking performance. In future, decision making capability will be introduced in LLFC controller using reinforcement learning technique to design model free controller.