
Abstract
In this paper, a new indirect fuzzy sliding mode control with varying boundary layer is presented for uncertain nonlinear systems via time-variant sliding function in the presence of external disturbances. Based on rejection parameter and rejection regulator, a time-variant sliding surface as an adaptive filter is defined. This time-variant sliding surface based on an adjustable rejection parameter filters all the un-modelled frequencies. An adjustable boundary layer width, break-frequency bandwidth and the consequent parameters in fuzzy rules are tuned to attenuate the effects of the system uncertainties and un-modelled frequencies, efficiently. Also, the chattering phenomenon is completely eliminated. Three theorems and one lemma, which facilitate design of the proposed controller, are proved. Two simulation examples are presented to illustrate the performances and the advantages of the proposed method.
Keywords
Introduction
Sliding mode control has been used as an efficient method to design the robust controller for uncertain nonlinear systems in the presence of external disturbances. In the sliding mode techniques, the proper transformation of tracking errors are introduced to generalize errors. Therefore, a tracking problem can be transformed into an equivalent first order stabilization problem [11]. The main objectives in favour of sliding mode control applications are order reduction, decoupling design procedure, disturbance rejection, insensitivity to parameter variations and simple implementation by means of power converters for Electric Drives [12]. The Electro- mechanical applications of SMC, majority in control and estimation methods of automotive industry, are presented in [13]. A nonlinear sliding mode control approach, based on all aerodynamic forces and moments for a Quad rotor Vertical Take-Off and Landing (VTOL) type of Unmanned Aerial Vehicles (UAVs) in order to stabilize its vertical flight dynamics is designed [2]. The tracking performance of a helical desired trajectory is evaluated for the proposed controlled Quad rotor craft. An extended of a reliable assisted remote control for a four-rotor miniature aerial robot, guaranteeing the capability of a stable autonomous flight is presented. Many experiments on a newly implemented quad-rotor prototype have been conducted in order to validate the presented theoretical analysis [1].
The sliding mode control employs a discontinuous control to derive the system state to reach and maintain its motion on sliding surface. The discontinuity in the control action provides the chattering and this phenomenon may active the un-modelled frequencies, which are undesirable, in application. To avoid these drawbacks, the boundary layertechnique and the identification methods are usually exploited [4, 11]. An adaptive sliding mode control approach for the synchronization of the uncertain fractional-order chaotic systems is designed [7]. A direct self-structuring adaptive fuzzy control has been presented for affine nonlinear systems [8]. The difference functions Δf and Δg must be obtained to calculate the control gain parameter [8]. In [5], an adaptive fuzzy wavelet neural sliding mode controller is proposed to design an smooth sliding mode control for a class of high-order nonlinear systems in the presence of uncertainty. The self-structuring algorithm ensures that the number of rules never exceeds a predefined upper bound. The auto-tuning neurons computation for designing the sliding mode control [3] and the fuzzy adjusting method for finding the suitable boundary layer width [6] are used. In [23], an H∞ output feedback controller for nonlinear network systems is designed. The considered systems are represented by using T-S fuzzy models which have norm-bounded parametric uncertainties. A dynamic output feedback controller design, has been used to control the continues time semi-Markovian and discrete time Markovian jump linear systems with time-varying delay [17, 18]. Also, the output feedback controller has been used to control nonlinear systems which are represented by T-S fuzzy-affine-models [19, 21]. To control nonlinear stochastic and discrete systems which have actuator faults, a reliable robust static output feedback controller has been designed. The plant is contained parametric uncertainties and the authors have discussed the performance of the controller by analysing and synthesising it, completely [19, 21]. An H∞ filter design approach for a class of nonlinear time-variant delay systems has been, introduced in [20]. In the sliding mode control literature, only time-invariant sliding equation has been studied, extensively. In this paper, a time-variant sliding equation is used. For this purpose, the rejection regulator based on a parameter that is called "rejection parameter" is defined to choose objectively coefficients of error states in sliding equation. The presented method, based on adaptive laws, adaptive sliding surface and adaptive saturation function rejects the effects of all the un-modelled frequencies and eliminates chattering phenomenon with at least error and fault tolerance. Also, the sliding surface acts as a chain of (n - 1) adaptive low pass filters, in practice. Three theorems and one lemma are proved which facilitate design of an indirect fuzzy sliding mode control with varying boundary via time-variant sliding function.
In recent years, the scientific and industrial specialists have had considerable studies and researches on fuzzy model based nonlinear networked control systems [9]. For instance, design of an adaptive fuzzy controllers to guarantee the tracking performance under the effects of input dead-zone and the constraint of prescribed tracking performance functions for nonlinear networked control systems is presented in an innovation approach [16]. Therefore, a new robust fuzzy tracking control for networked industrial processes based on time-variant sliding surface and H∞ approach will be considered as the next studies of the authors of this paper.
Fuzzy logic system
Before presenting and analysing of the indirect fuzzy sliding mode control with varying boundary layer via time-variant sliding function design, it is necessary to introduce the fuzzy logic system, briefly.
A fuzzy system includes a set of fuzzy rules in the following form
The fuzzy logic system introduces a nonlinear mapping from
In this system, i denotes the number of the fuzzy rules and j indicates the number of input for fuzzy logic system.
Consider the n
th
order nonlinear dynamical system defined by the following state equation
Where f and g are unknown bounded nonlinear functions and
An alternative definition of the sliding function is [10]
Designing the sliding mode control has two steps. The first step is to select the parameter λ such that all the un-modelled frequencies of the system are rejected. The other step is to find the control law such that the reaching condition (7) is satisfied. By using the Laplace transformation, the linear differential equation (8) can be considered as a chain of (n - 1) first-order low-pass filters with break-frequency bandwidth λ. Such that, s and e are input and output of the filters, respectively and p is Laplace operator. The parameter λ should be selected such that all the un-modelled frequencies of the system are rejected. Therefore, if
In the following, a theorem is presented to choose the coefficients of error states in sliding equation, objectively.
We define the rejection regulator in following form:
For notation simplicity, let
In other words
Therefore, we have
Now, Equations (15) and (20) yield
On the other hand, from Assumption (I) we have:
By using the inequalities (22) and the relations (12), we have
In the sliding mode control, the abrupt change of sign of the term Tsgn (s) produces chattering. To avoid this drawback, the boundary layer from both sides of the sliding surface s = 0 is usually implemented. If the state of system is out of the boundary layer, then by using the reaching condition the state reaches to the inside of the boundary layer. The fixed boundary layer usually does not guarantee the precise tracking. So, in this paper a varying boundary layer is considered. The saturation function was implemented in sliding mode control law. The tracking precision is not guaranteed by using the saturation function. In this paper, for avoiding to this drawback, an adaptive Hyperbolic Tangent function is used instead of saturation function. in the next section the tuning laws for designing the indirect fuzzy sliding mode control via time-variant sliding equation, are introduced.
Analysis
It is very clear that the performance of SMC is sensitive to the coefficients of the sliding equation. For instance, in second order nonlinear systems, if the coefficients are assigned such that slope of sliding surface has a large value, the system gives a fast response due to the large values of the control signal. But the system may become unstable. Conversely, if the slope of the sliding surface has a small value, the system will be more stable. But the system response will become slower due to small values of the control signal. In this paper, by using the rejection parameter, the coefficients of sliding equation are replaced by the rejection regulator. For this purpose, we consider the sliding equation in the following form:
Where δ (t) is time-variant rejection parameter. This equation defines a time-variant sliding equation. By adjusting the rejection parameter, the performance of the overall system can be improved with respect to conventional sliding mode control. From now, the sliding equation is assumed to be time-variant as defined in the Equation (25). In this paper, stability of the closed loop system and the time variant sliding function is guaranteed via Lyapunov approach and they are facilitated by the next theorem. Since in practical systems there are always uncertainties in the dynamical equations, the free models and identification methods are used in sliding mode control approach for improving the performance and avoiding the effects of uncertainties in mathematical models. In this paper, we use the fuzzy system
Substituting Equation (5) into Equation (29) yields:
Now, we define
Such that
Where
By differentiating the Equation (41) with respect to time we have
By replacing the Equation (34) into the Equation (42) one can conclude:
Since
If
By integrating both sides of the Equation (45) and some manipulation, we have
According to the universal approximation theorem and the assumption of bounded external disturbances, x is bounded and ɛ ∈ L1. If ɛ ∈ L1 then from the Equation (46) we have s ∈ L1. Moreover, the adaptive laws in the Equations (35) and (36) guarantee that θ
f
∈ Ω
θ
f
and θ
g
∈ Ω
θ
g
. This implies that all variables on the right hand side of the Equation (34) are bounded. Therefore,
Figure 1 shows pictorially the effect of variation of σ on the boundary layer width. As σ gets larger the width of boundary layer becomes narrower.

Variation of boundary layer width.
In this section a couple of examples are presented to illustrate the validity of the proposed method. The proposed method presents the better tracking performance than the conventional methods [4, 14]. Without loss of generality, we consider ν = 20 for both of examples and the performance index is the Integral of Absolute Error,
For demonstrating the performance of the presented method, the Gaussian membership function for fuzzy approximation of f are chosen as
The simulation results with random disturbances in the interval [-1.5, 1.5] are shown in Figs. 2 and 3. The Fig. 2 shows that the state can trace the desired trajectory quicker than in [4] and [14], without increasing amplitudes of the control signals. Also, the control input chattering does not occur and the effects of all un-modeled frequencies are eliminated. The Fig. 3 indicates the variation of rejection and boundary layer parameters, for updating the time-variant sliding function and the boundary layer width, respectively. The results of this example are compared with those of other methodologies in Table 1 to illustrate the effectiveness of the proposed method. According to the Table 1, the designed control laws in this paper reduced the control signal amplitude and IAE significantly, in compare with [4, 14].
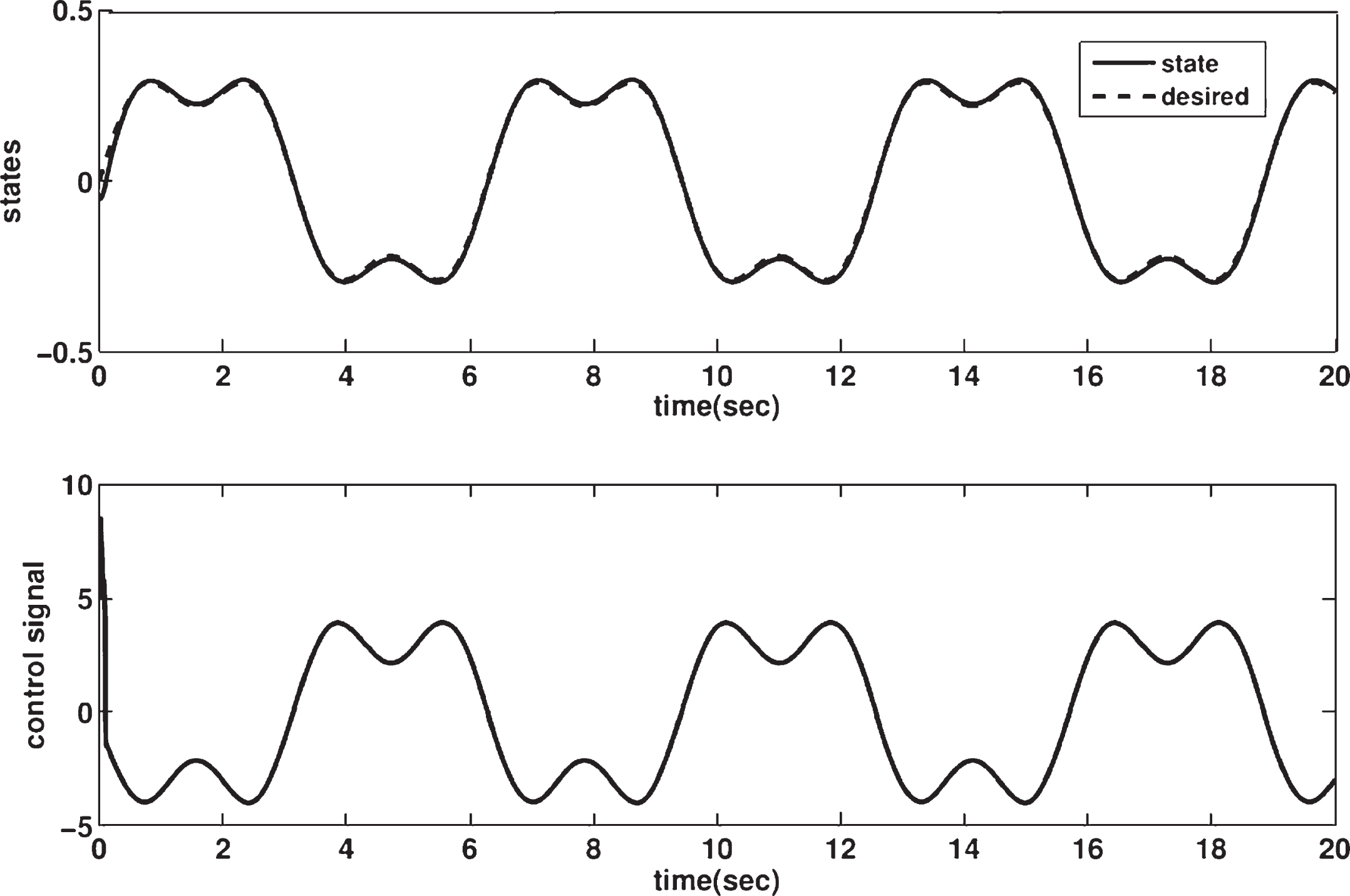
Tracking result and control signal for Example 1.
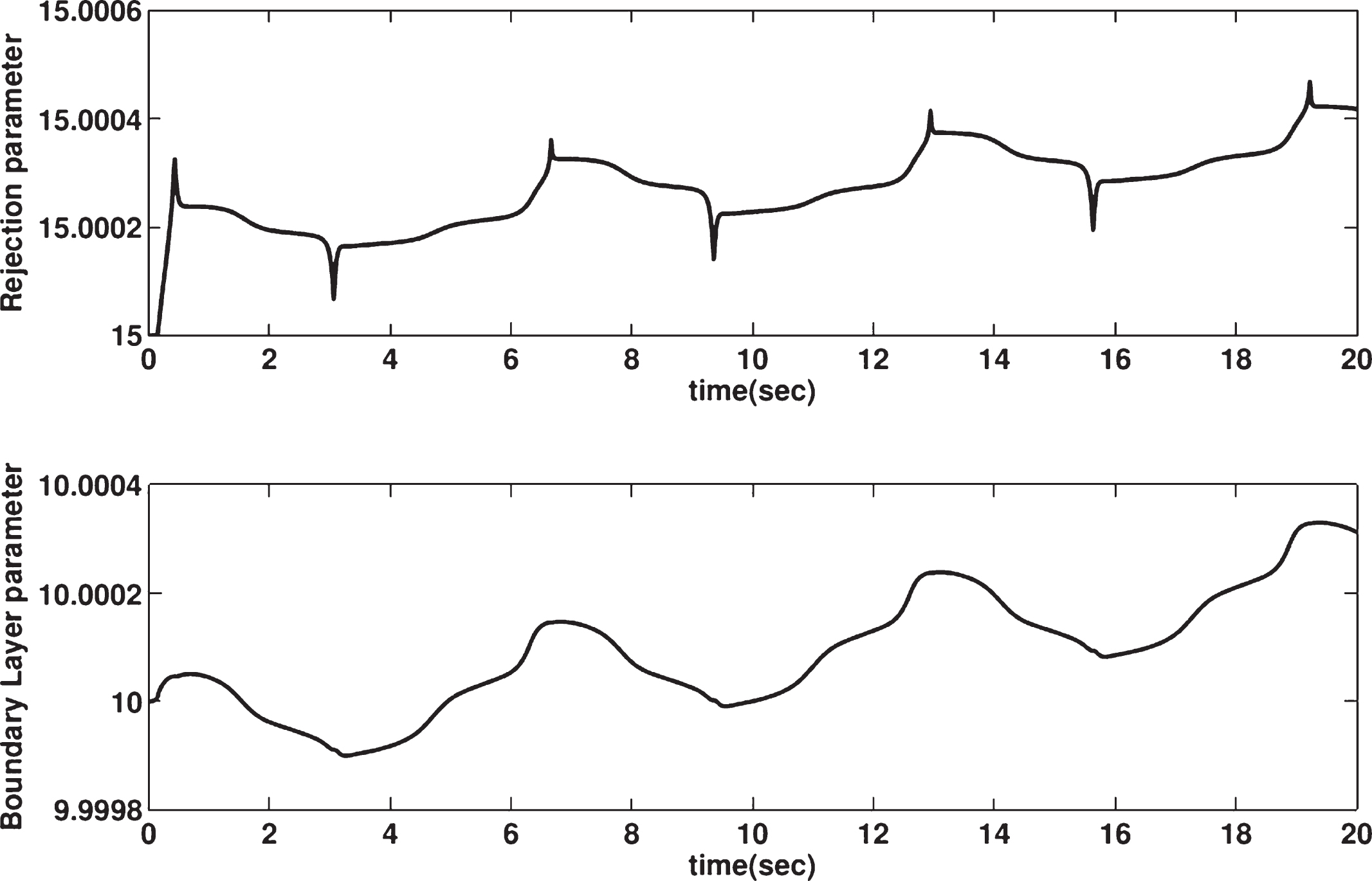
Rejection and boundary layer parameter Example 1.
Benchmarks for controller performance in Example 1
Where the disturbance d (t) is a square wave with amplitude ±1.5. This system is chaotic without control. The control objective is to maintain the system states to track the reference input x
d
= sin(t). For demonstrating the performance of the presented method, the Gaussian membership function for system states are chosen as,
The initial consequent parameters of fuzzy rules are chosen randomly in the interval [-12, 12]. We select η = 0.1 and Mθ
f
,Max = 30. The other initial parameter values are selected as
The simulation results are shown in Figs. 4 and 5. The Fig. 4 shows that the state can trace the desired trajectory quicker than in [4] and [4] without increasing amplitudes of the control signals. Also, the control input chattering does not occur and the effects of all the un-modeled frequencies are eliminated. The Fig. 5 indicates the variation of rejection and boundary layer parameters for updating the time-variant sliding function and the boundary layer width, respectively. The results of this example are compared with those of other methodologies in Table 2 to illustrate the effectiveness of the proposed method. According to the Table 2, the designed control laws in this paper reduced the control signal amplitude and IAE significantly, in compare with [4, 14].
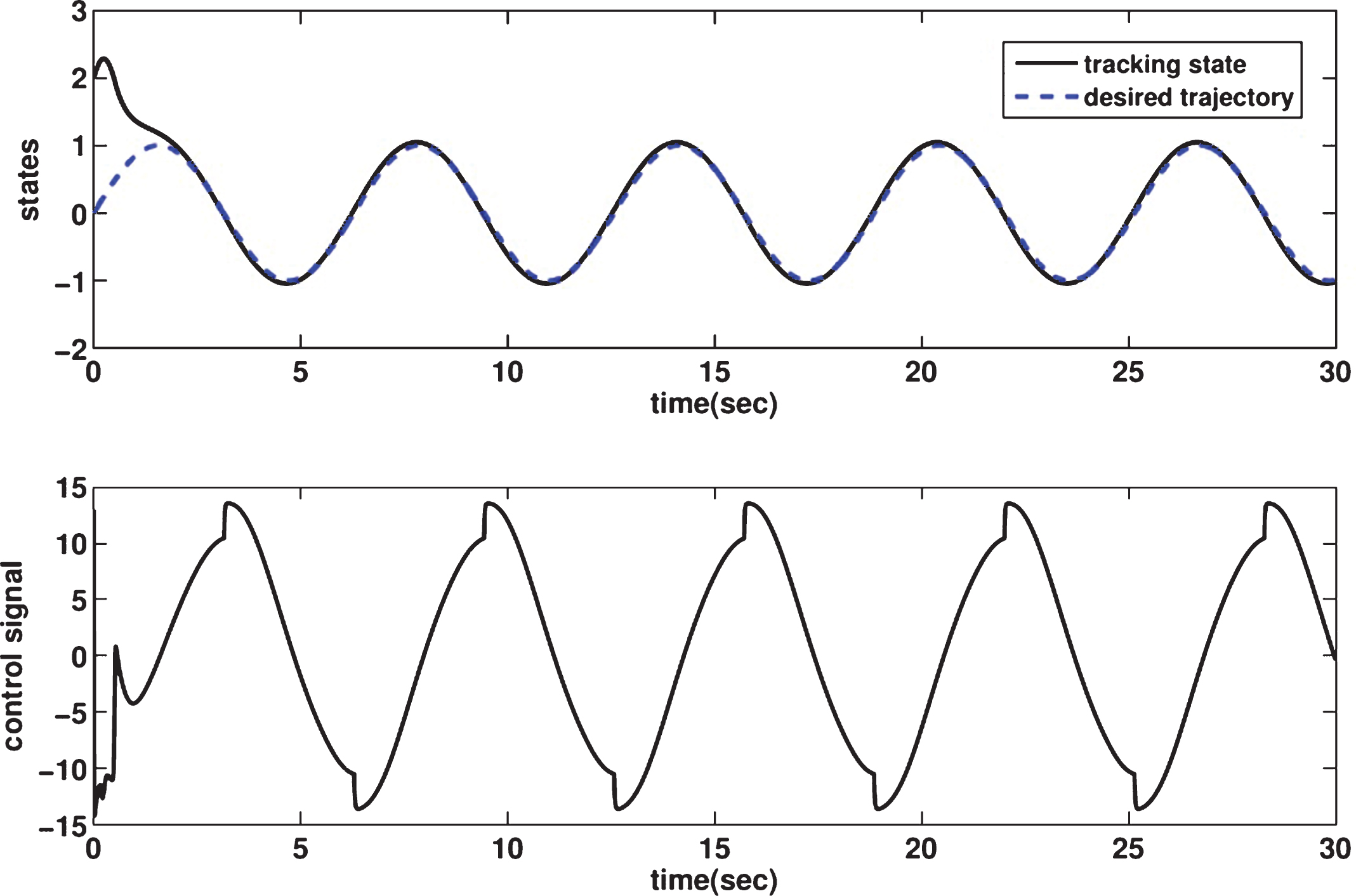
Tracking result and control signal for Example 2.
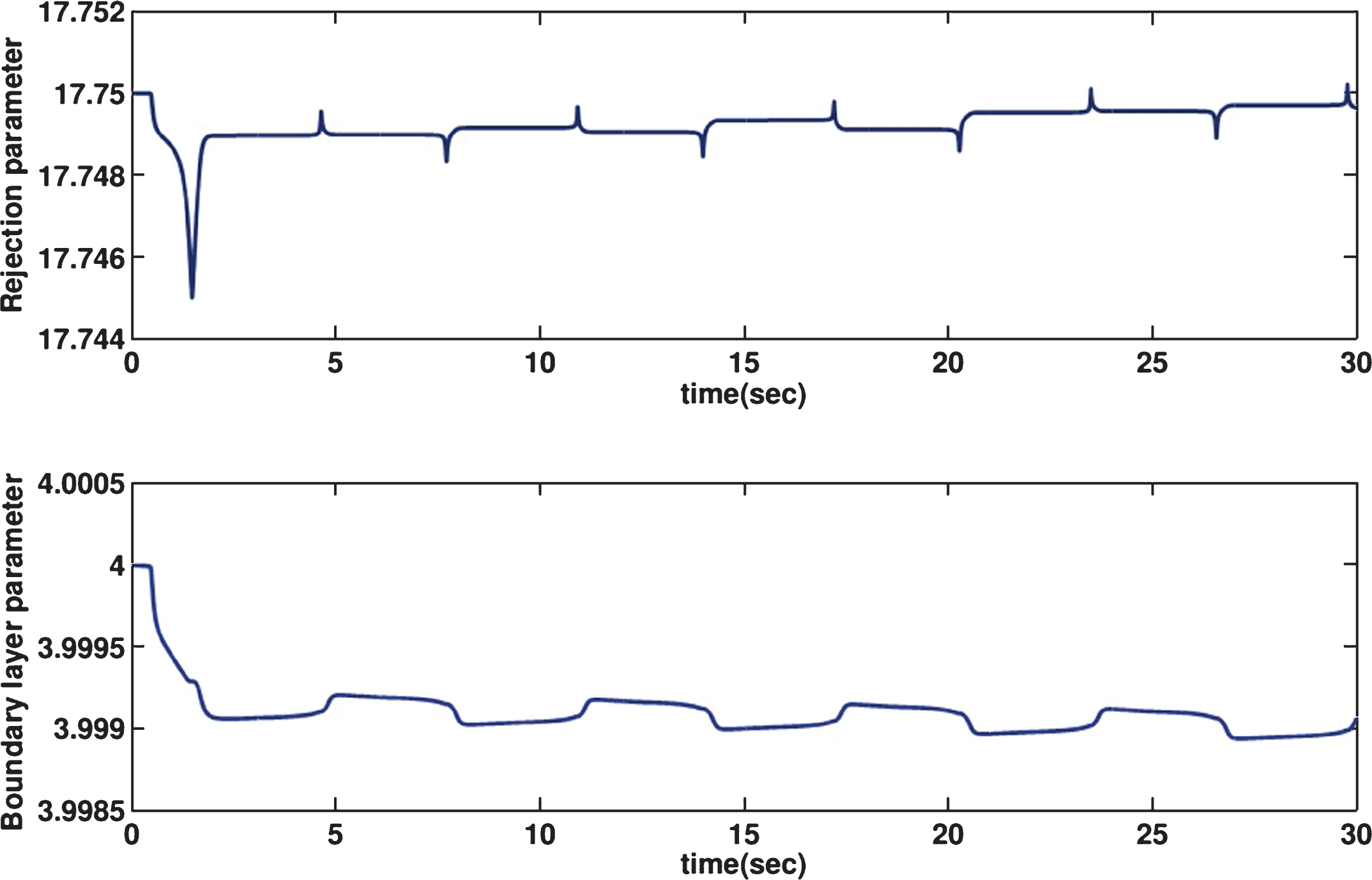
Rejection and boundary layer parameter Example 2.
Benchmarks for controller performance in Example 2
In this paper, an indirect fuzzy sliding mode control with varying boundary layer via time-variant sliding function is proposed for a class of uncertain nonlinear systems. The sliding surface is defined based on the adjustable terminologies rejection parameter and rejection regulator. The consequent parameters in fuzzy rules, boundary layer parameter and rejection regulator are tuned independent of a priori knowledge of the system. By using the proposed controller, based on the time-variant sliding equation and varying boundary layer, all the un-modeled frequencies are adaptively filtered. Also, the effects of the fuzzy approximation errors and the external disturbance on tracking performances are attenuated efficiently and the control input chattering does not occur. Simulation examples illustrate the superior performance and the advantages of the proposedmethod.