
Abstract
This paper addresses a selective maintenance optimization problem for a fuzzy multi-state system composed of fuzzy multi-state elements. Due to insufficient data and unpredictable external working conditions, both the performance capacity and states transition intensities of multi-state elements cannot be known precisely, but are represented by fuzzy numbers. Additionally, both the durations of a break and a succeeding mission are also treated as fuzzy values. To maximize the fuzzy probability of a system successfully completing a succeeding mission, a selective maintenance model is proposed to identify an optimal subset of maintenance activities to be performed on some elements in the system. A solution algorithm containing three rules to eliminate inferior solutions and narrow down elements’ states combinations is proposed to resolve the new selective maintenance model in a computationally efficient manner. An illustrative example of an archibald is presented to demonstrate the effectiveness of the proposed model.
Keywords
Notations
Multi-State System
Multi-State Element
Fuzzy Multi-State System
Fuzzy Multi-State Element
Fuzzy Markov Model
Universal Generating Function
Fuzzy Universal Generating Function
Number of FMSEs in a FMSS
Fuzzy duration of a break
Fuzzy duration of a suceeding mission
The best state of element i
Set of the possible fuzzy performance capacities of element i
Fuzzy performance capacity of element i in state j
Set of the fuzzy state probabilities of element i at fuzzy time
Fuzzy probability of element i staying in state j at fuzzy time
Fuzzy performance capacity of element i at fuzzy time
Set of the possible fuzzy performance capacities of a system
Fuzzy performance capacity of a system at its state u
Set of the fuzzy state probabilities of a system at time
Fuzzy probability of a system at state u at time
Fuzzy performance capacity of a system at time
System structure function
A triangular fuzzy number
Maintenance activity to restore element i from state h to j (0 ≤ h ≤ j ≤ k i )
Resources consumption for restoring element i from state h to j (0 ≤ h ≤ j ≤ k i )
Membership function of a fuzzy number
α-cut level set of a fuzzy number
Fuzzy transition intensity of element i from state j to h
State of element i after maintenance
Fuzzy composition function
Fuzzy demand of a suceeding mission
Fuzzy probability of a system successfully completing the next mission with the maintenance option L
Binary variable indicating whether element i is to be maintained
State of element i before conducting maintenance
Cost of recovering element i from state Y i to state m i
Fixed maintenance cost for element i
Variable maintenance cost of recovering element i from state Y i to state m i
Total maintenance cost of the maintenance option L
Time of recovering element i from state Y i to state m i
Fixed maintenance time for element i
Variable maintenance time of recovering element i from state Y i to state m i
Total maintenance time of the maintenance option L
Introduction
In many practical applications, systems, such as nuclear plants, military equipment, fertilizer plants, aircrafts, are designed to execute a sequence of missions with a break between two adjacent missions [1–3]. Failures of these systems during missions may cause severe threat to personal security or damage to environment [4, 5]. Therefore, maintenance should be carried out during the breaks between missions to avoid the potential risk of mission failure. However, due to the limited maintenance resources, such as time, budget, spare parts etc., it may not be possible to perform all the desired maintenance actions within a break. In such case, decision-makers have to make a trade-off between the system performance and resources consumption, and identify the optimal subset of maintenance activities to be performed. This sort of maintenance strategy is the so-called selective maintenance [6].
The selective maintenance model was firstly developed by Rice et al. [7] in 1998, and in their work, a series-parallel binary-state system composed of s-independent and exponentially distributed components was investigated. The model can determine a subset of failed components to be replaced before executing the next mission. Motivated by some practical applications, selective maintenance optimization for much more practical cases has been extensively investigated in Ref. [8–11]. As many systems manifest multi-state nature, the selective maintenance problem for multi-state systems (MSSs) has received an extensive amount of attentions in the past few years. For instance, Chen et al. [12] discussed a selective maintenance problem for multi-state systems and components. They assumed that both systems and components were homogenous with K+1 possible states. A probability distribution matrix was given to evaluate the probabilities of components’ states at the end of the next mission. Liu et al. [13] investigated a selective maintenance problem for a multi-state system composed of binary-state components. The capacity of each individual component in the MSS had a cumulative contribution to the performance capacity of the entire system. The universal generating function (UGF) method was adopted to evaluate the probability of a MSS successfully completing the next mission. Pandey et al. [14] discussed a selective maintenance problem for a multi-state system consisting of multi-state components. The state probability distributions of components at the end of the next mission were assessed by the continuous-time Markov chain. The method proposed by Chen et al. [12] was followed by Dao et al. [15] to investigate the selective maintenance problem in MSSs subject to economic dependence.
Although considerable efforts have been made to study the selective maintenance optimization for MSSs. An implicit hypothesis of these reported works is that the knowledge of systems and mission profiles, such as state performance capacity, state transition intensity, mission durations, etc., is deterministic and precisely known. This assumption may not be always true in engineering practice. Uncertainty is unavoidable and extensively exists in reliability evaluation [16–20], system operation [21, 22], maintenance optimisation [23, 24], reliability optimisation [25–27] system diagnosis [28], and state performance assessment [29]. Because (1) it is very difficult to precisely estimate coefficients or parameters due to model simplification or inaccurate and sparse data [30, 31], (2) the performance of systems and elements is vague and also affected by the external uncertain working environment and, (3) the durations of missions and breaks are unpredictable and may be affected by various uncertain factors [32, 33]. To the best of our knowledge, only limited reported works have addressed the selective maintenance problem considering uncertain missions in the context of binary-state systems (see Djelloul et al. [34], Khatab et al. [35] and Cao et al. [36]). In their studies, the durations of missions and/or breaks were assumed to be random variables characterized by probability distributions. Fuzzy set, as an alternative tool to quantify imprecise information, can also be utilized to characterize the uncertainties associated with system deterioration model and the durations of missions and breaks in the case of limited data or vague knowledge. For example, in a battle, the launcher of an archibald system is requested to perform a sequence of missions, and maintenance can only be performed within an uncertain combat mission break. The durations of missions and breaks can only be represented by an ambiguous way, such as “a mission duration is around 10 days”, “a mission break is between 3 and 5 hours, but close to 3.5 hours”. The launcher can work at different states with respect to different shell shooting capacities. Because of the effects of unpredictable external environment and insufficient data, the performance capacity of each state and states transition intensities can only be quantified by an ambiguous way. In this situation, decision-makers have to choose a subset of maintenance actions for some elements, so as to maximize the probability of the system successfully completing the succeeding mission. As fuzziness cannot be straightforwardly tackled by the reported works on the selective maintenance optimization, there is a pressing need to develop a new selective maintenance model to address the aforementioned challenges.
Furthermore, the selective maintenance model is oftentimes a complex, non-linear, discrete problem, and the solution space may be very huge in many practical applications. Some meta-heuristic algorithms, such as the genetic algorithm, the differential evolution algorithm etc., are capable of identifying the optimal global solution in a computationally efficient way. However, the solution efficiency of these algorithms can be further improved from twofold: (1) some inferior solutions (maintenance strategies) in terms of system structure, resources constraints etc. can be eliminated directly before performing an intensive searching. (2) Based on the system structure, some elements’ states combinations can be discarded intuitively when evaluating the probability of the system successfully completing the next mission. Hence, by taking the advantage of these two aspects, the solution space and elements’ states combinations can be firstly reduced before executing a full enumeration method or meta-heuristic algorithms.
Motivated by the real-life applications, a selective maintenance optimization problem for FMSSs confronting fuzzy durations of missions and breaks is investigated in this paper. It can be considered as an important extension of the work in Ref. [14] by taking account of the fuzzy uncertainty in modeling and decision-making. Compared to the exiting works on selective maintenance optimization, the unique features of the present work are threefold: (1) The system and element can operate in partially degraded states between perfectly functioning and completely failed, and the performance capacity of each state and states transition intensities are represented as fuzzy values. (2) The durations of missions and breaks are uncertain, and they are also characterized by fuzzy values instead of crisp values or probability distributions. (3) A solution algorithm containing some rules is proposed to improve the solution efficiency in the fuzzy context.
The remainder of this paper is organized as follows. Section 2 describes the FMSSs in question and some basic assumptions. Section 3 discusses the proposed selective maintenance model in details. An approach to solve the proposed selective maintenance model is presented in Section 4. In Section 5, an illustrative example together with some discussions is given to illustrate the effectiveness the proposed method. A conclusion and some future works are summarized in Section 6.
Fuzzy multi-state systems
Suppose that a FMSS is composed of n s-independent FMSEs. The element i (i = 1, 2, ⋯ , n) has k
i
+ 1 states, and the corresponding performance capacities are represented by an ordered fuzzy set
Given the fuzzy performance capacities and the fuzzy transition intensities of all the FMSEs, the state distribution and the reliability function of a FMSS can be evaluated by the parametric programming and the FUGF. The details of the evaluation process can be found in Ref. [37].
The proposed selective maintenance model
Problem description and maintenance resources consumption
Suppose that a FMSS has just finished the last mission (denoted as the previous mission in Fig. 1) and arrived a depot for maintenance. All the maintenance activities must be finished within a required mission break. However, due to the limited maintenance budget and time, only a subset of elements in the system can be maintained. Both the durations of missions and breaks are fuzzy values, denoted as

An illustration of a system executing the succeeding mission.
After the previous mission, an element can be in any one of the states {0, 1, ⋯ , k
i
} due to deterioration. From the perspective of maintenance efficiency, the available maintenance actions to be performed on each component can be categorized as:
The state transition and resources consumption associated to each maintenance option are shown in Fig. 2. For element i, all the possible maintenance actions and the corresponding resources consumption can be represented by a set

The maintenance resources consumption and the state transition of element i for each maintenance option.
In addition to the above problem descriptions, all the basic assumptions are summarized as follows: The elements’ states at the end of the previous mission are observable. Each element has multiple maintenance options. Maintenance can certainly restore an element to its better state, and the associated resources consumption can be explicitly defined as shown in Fig. 2. The degradation of elements can be modeled by homogeneous Markov models. The states transition intensities, as well as performance capacities, are represented by fuzzy values. Maintenance can only be performed within a mission break.
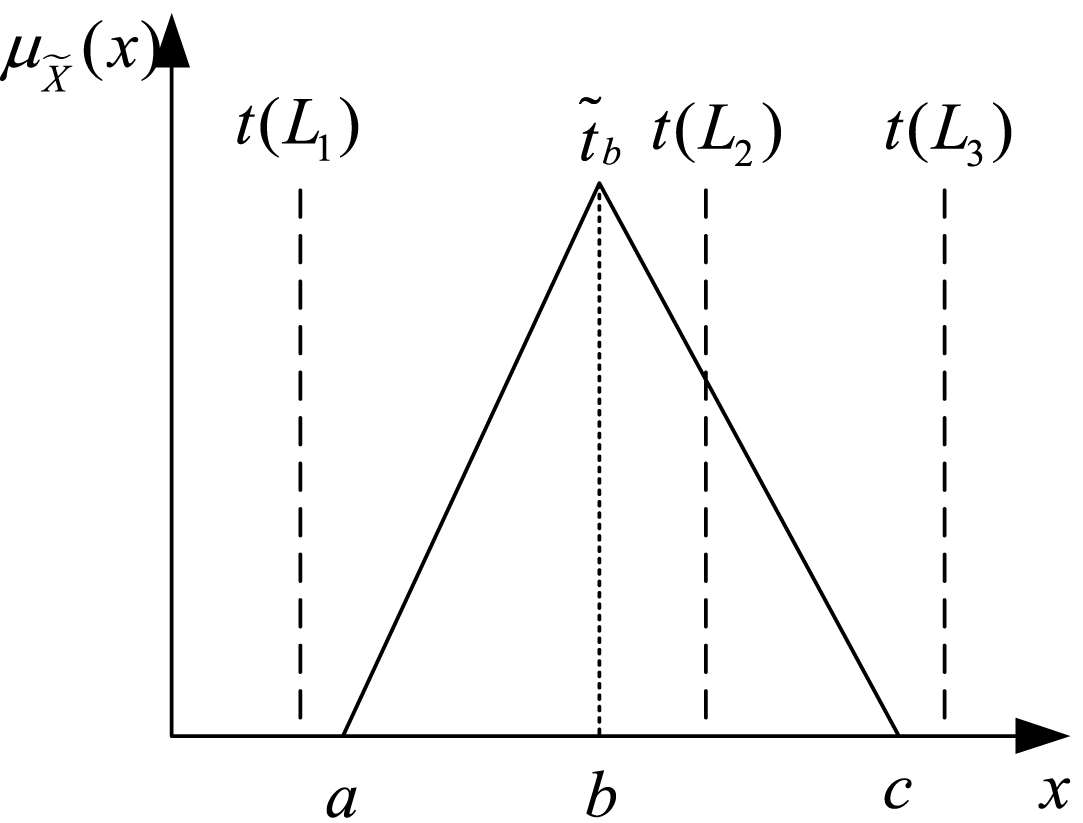
In this paper, the performance capacities and states transition intensities of all the elements are represented by triangular fuzzy numbers. For simplicity, a triangular fuzzy number
The α-cut level set (0 ≤ α ≤ 1) of the fuzzy number

The α-cut level set of a triangular fuzzy number (a, b, c).
Assume that the state of element i after performing a maintenance option is denoted by m
i
(0 ≤ m
i
≤ k
i
). The transition intensity between a pair of states during the next mission is denoted by a fuzzy value
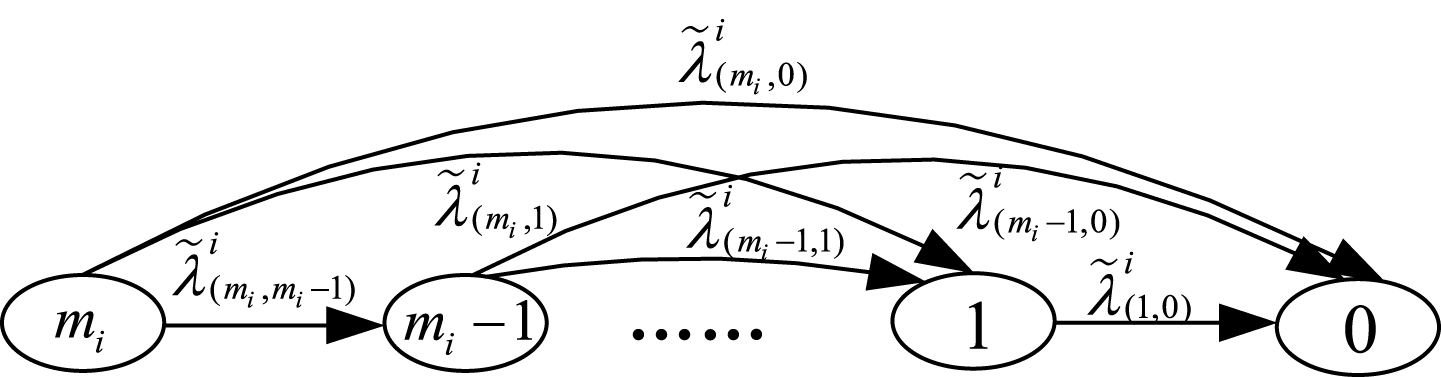
The state transitions of element i in the next mission.
Let the fuzzy transition intensity matrix of element i be denoted as:
Based on Equation (5), one can get
As
where
After executing the next mission, the entire system will be in one of k
s
+ 1 states ranging from the best state k
s
to the worst state 0. Based on the possible combinations of components’ states after
where
Suppose that the state of element i after the previous mission is Y
i
(0 ≤ Y
i
≤ k
i
). The objective of the selective maintenance problem is to determine a subset of maintenance actions
Assume that the total required maintenance time for a maintenance option L is denoted as t (L). The probability that the maintenance option L can be completed within a break with a fuzzy duration is defined as
The break with a fuzzy duration vs. the total maintenance time of L.
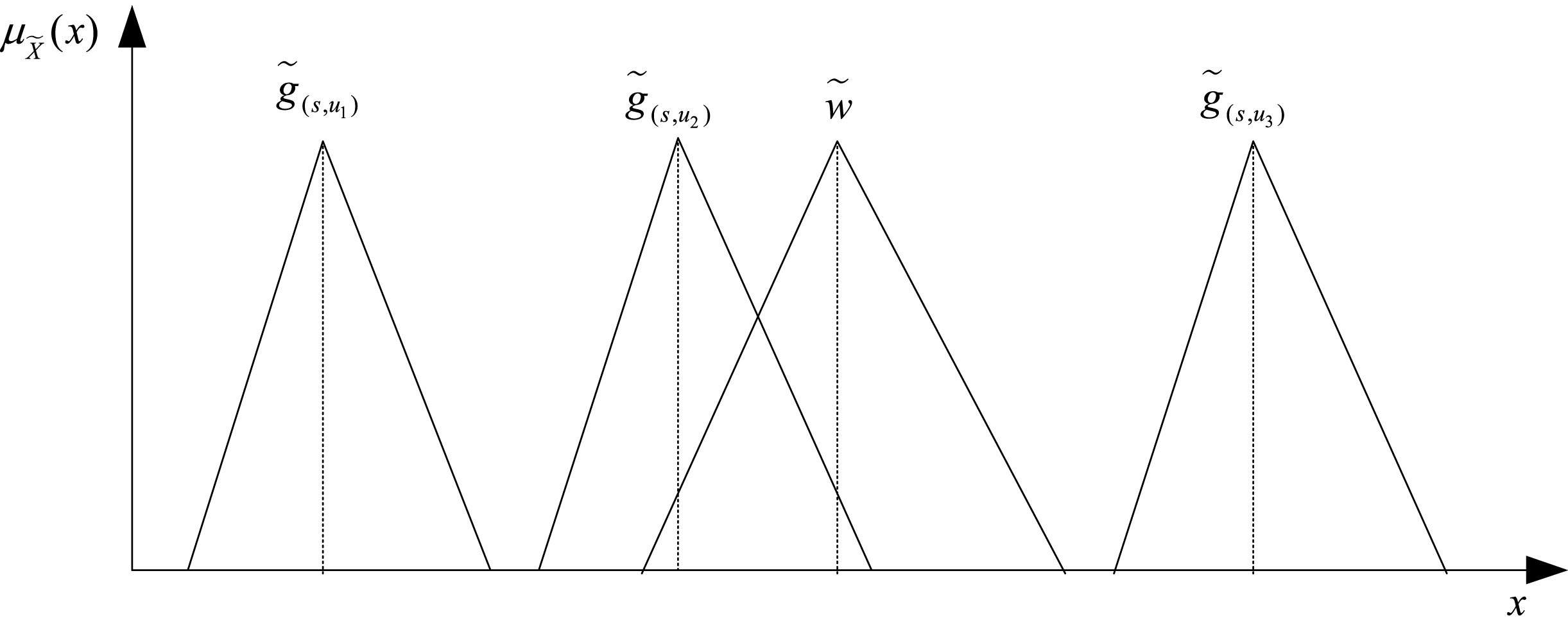
The fuzzy performance capacities and the required mission demand level.
Considering a FMSS with k
s
(L) +1 possible states during the next mission after performing a maintenance option L, based on the required demand level of the next mission, each state can be categorized into one of the three situations, namely acceptable state, failure state, and the states in between [30]. As shown in Fig. 6, if
Hence, the fuzzy probability of a FMSS successfully completing the succeeding mission after performing a set of maintenance actions is equal to:
The interval of SU α (L) can be, therefore, computed by:
Let V
i
be a binary variable indicating whether element i is selected to be maintained. It can be written as:
The maintenance resources considered in this paper include both maintenance cost and time. As defined in Ref. [14], the cost and time incurred by each maintenance action are composed of two parts: the fixed cost/time and the variable cost/time, and they are written as:
Then, the selective maintenance model can be formulated as:
For the specific selective maintenance optimization problem, some inferior solutions can be eliminated by a set of rules. The flowchart of the proposed optimization algorithm is presented in Fig. 7. The solution procedure is:
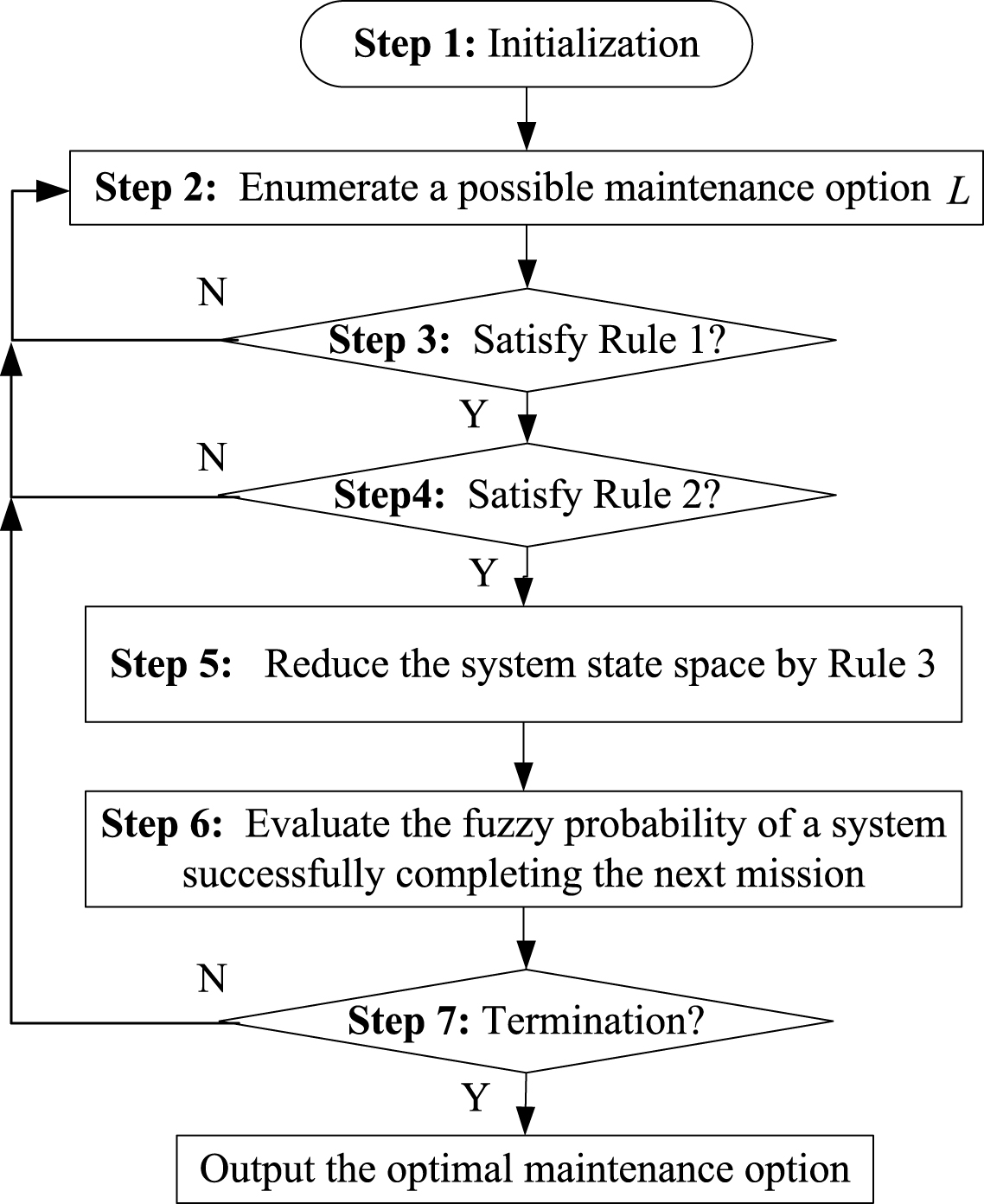
The flowchart of the solution algorithm.
We take the launcher of an archibald as an example to elaborate the proposed solution algorithm. The launcher is a shell filling and shooting system, and it consists of two subsystems connected in parallel as shown in Fig. 8. Both subsystem 1 and subsystem 2 are composed of two elements connected in series. Element 1 and element 2 are two s-independent and identical elements, namely shell filling. Element 3 and element 4 are two identical shooting parts. The shell filling elements are capable of loading ammunitions automatically to the shooting elements, and then, the shell is launched by the shooting elements.
The structure of the studied launcher system.
To facilitate computation, the maintenance option
The element states and the fuzzy performance capacities (units/hour)
The maintenance cost (units) and the time (hours) associated with each maintenance action
Eliminating the maintenance options based on Rule 1
The reduced solution space based on Rule 2
The reduced solution space based on Rule 2
The number of the elements’ states combinations to be evaluated under each maintenance option
It can be observed from the above illustrations that, compared to the method without executing the proposed rules, e.g., a full enumeration method, the solution space of the proposed solution algorithm can be significantly reduced by 66.7%, i.e., (36 - 12)/36. It should be noted that, in practical applications, system may be composed of many elements, and each element may have many maintenance options. It is very time-consuming to enumerate all the possible solutions as the aforementioned illustrative example. Some computational intelligent algorithms, such as the genetic algorithm, the differential evolution algorithm etc., can be, therefore, introduced to resolve the optimization problem in a computationally effective manner. The proposed three rules can still be embedded in these advanced optimization algorithms at the stage of generating new solutions to eliminate the inferior solutions as many as possible.
An illustrative example
To demonstrate the effectiveness of the proposed selective maintenance model, we recall the example presented earlier in Section 4. The fuzzy states transition intensities of elements are given in Table 7. Assume that the durations of the break and the next mission are
The number of the elements’ states combinations to be evaluated under each maintenance option
The number of the elements’ states combinations to be evaluated under each maintenance option
Firstly, based on Equation (7), one can get the FUGF of each element. For element 1, the FUGF is given as:
Based on the FMM, the state distribution of element 1 at the end of the next mission is computed by Equation (8), and it equals:
For element 2, the FUGF is written as:
For element 3, the FUGF is:
Likewise, for element 4, the FUGF is:
The state distribution of element 4 is given by:
Based on Equation (9), the FUGF of the FMSS can be recursively derived by the UGF operators as follows:
By applying Rule 3, all the possible combinations of elements’ states with the system performance capacity being greater than the required mission demand level at the end of the next mission are given by:
The fuzzy probability, cost, and time of all the feasible maintenance options
Thus, the FMSS has five elements’ states combinations to be evaluated. Assume that the cut level α equals to 0. For state 1:
For the maintenance option L = (2, 1, 1, 2), one has
For state 1,
In the same fashion, one can get the probability of other states being able to meet the required mission demand level. Then, based on Equation (18) and the parametric programming, the fuzzy probability of the system successfully completing the next mission under maintenance option L = (2, 1, 1, 2) is:
The fuzzy probability and the associated membership functions of all the twelve maintenance options narrowed down by Rules 1 and 2 in Section 4 are shown in Table 8 and Fig. 9, respectively. It can be observed from Fig. 9 that the membership functions of the fuzzy probabilities of the system successfully completing the next mission in present work are no longer triangle fuzzy numbers. When α is greater than 0.6, the probabilities of the maintained system successfully completing the next mission under maintenance options 1,2,4,5,8,11 and 12 are zero. Because the fuzzy uncertainty decreases with the increase of α. For a special case, that is α = 1, all the fuzzy numbers reduce to crisp values. In such case, the total maintenance time of options 4, 11 and 12 is 4 hours which is less than the mission break 3.5 hours, and the corresponding maintenance activities cannot be completed in the limited mission break. Similarly, for options 1, 2, 5 and 8, the system performance capacity cannot satisfy the next mission demand when α is very large.
The membership functions of the fuzzy probability of a system successfully completing the next mission under the twelve feasible maintenance options.
Furthermore, it can be observed from Fig. 9 and Table 8 that the membership functions for options 3, 9 and 10 are not continuous, and there is an abrupt change (jump) at α = 1. This is because, in some cases, the α-cut level relative cardinality of the difference of two fuzzy numbers
According to Table 8, the best maintenance strategy is maintenance option (0,2,1,1) when α = 1, that is, doing nothing for elements 1 and 3, replacing element 2, and performing imperfect maintenance on element 4. The associated maintenance cost, and time are 24.7 units and 3.5 hours, respectively. The probability of the system successfully completing the next mission reduced to a crisp value, i.e. 0.6005. When 0 ≤ α < 1, it is not an easy work to identify the optimal maintenance option directly. However, it can be observed from Fig. 9 that the optimal maintenance option for 0 ≤ α < 1 is among the option 3, option 6, option 7, and option 10. For a specific α, the calculating centroid point method proposed by Cheng [38] can be adopted to rank these fuzzy values, and thereby, to identify the optimal maintenance option. Here, we take α = 0 as an example to explain this method. When α = 0, the centroid point of the fuzzy probability of option 3 is
Intuitively, the maintenance budget as an important maintenance resource can significantly affect the selection of maintenance options, as well as the fuzzy probability of a system successfully completing the next mission. In this section, the sensitivity analysis is conducted to examine how the optimal results may change with respect to the setting of the maintenance budget.
The maintenance budget c0 is changed from 0 to 30 units as depicted in Fig. 10. It can be observed from Fig. 10 that when the maintenance budget is 6 units, the optimal maintenance option includes performing imperfect maintenance action on element 1 and doing nothing on elements 2, 3 and 4 for α = 0, and the corresponding fuzzy probability of the system successfully completing the next mission is [0.0902,0.1215]. When α = 1, there is no feasible maintenance option, and the probability of the system successfully completing the next mission is 0. With the increase of the maintenance budget, the optimal maintenance option changes and a greater fuzzy probability of a system successfully completing the next mission can be achieved. However, it is not always the case that the fuzzy probability of a system successfully completing the next mission is keeping increasing with the augment of the devoted maintenance budget. It can be seen that when the maintenance budget increases to 24.7 units, the optimal maintenance option and the fuzzy probability of a system successfully completing the next mission do not change with the increase of the maintenance budget. Because the duration of the break becomes a critical bottleneck to the improvement of the fuzzy probability of a system successfully completing the next mission.
The fuzzy probability of a system successfully completing the next mission with respect to the different settings of the maintenance budget.
Additionally, it can be observed from Fig. 10 that, for a specific maintenance budget, the optimal maintenance option may vary with α. For instance, when the maintenance cost is 17.5 units, the optimal maintenance option for α = 0 is (1,1,1,1). While, for α = 1, the optimal maintenance option is (2,1,1,0). It can be concluded from the observations that: (1) the result of selective maintenance optimization for fuzzy multi-state systems relies on the α-cut level; (2) The optimal maintenance option in the crisp case, i.e., α = 1, may not be the same as the case with fuzzy uncertainty. Hence, compared to the conventional selective maintenance models (without considering fuzzy property), the proposed selective maintenance model can provide a more effective and reasonable outcome by taking account of the potential fuzzy uncertainty, and thereby offer a more reliable decision.
In this paper, a new selective maintenance model for a FMSS executing the next mission with the fuzzy mission and break durations is proposed. The FUGF and FMM are adopted to evaluate the states distributions of elements and systems at the end of the next mission. A solution algorithm containing three rules to reduce the solution space is proposed to solve the selective maintenance model in a computationally efficient manner. To verify the effectiveness of the proposed model, the selective maintenance optimization problem for a launcher system in an archibald is discussed.
This work can be further extended from several angles. The degradation process of each element is assumed to be a homogeneous Markov process in this work. The case of non-Markov degradation process is worth investigating. Another possible extension lies in considering the maintenance personnel as one of limited maintenance resources. In many practical applications, a system is composed of many elements, and many maintenance tasks are required to be performed within a limited break. While, the number of maintenance personnel is not always large enough to perform all the tasks simultaneously. The method of optimally allocating the maintenance tasks to the limited maintenance personnel is meaningful and to be addressed.
Footnotes
Acknowledgments
The authors greatly acknowledge grant support from the National Natural Science Foundation of China under contract numbers 71371042 and 71401173.