
Abstract
A methodology to systems identification based on Evolving Fuzzy Kalman Filter, is proposed in this paper. The mathematical formulation using an evolving Takagi-Sugeno (TS) structure, is presented: the offline Gustafson Kessel (GK) algorithm is used for initial parametrization of antecedent of the fuzzy Kalman filter inference system, considering an initial data set; and an evolving version of the GK algorithm is developed for online parametrization of antecedent of the fuzzy Kalman filter inference system. A fuzzy recursive version of OKID (Observer/Kalman Filter Identification) algorithm is proposed for parametrizing the matrices A, B, C, D and K (state matrix, input influence matrix, output influence matrix, direct transmission matrix, and Kalman gain matrix, respectively), in the consequent of the fuzzy Kalman filter inference system. Computational and experimental results from the estimation of the states and outputs of a dynamic system and a two-degree-of-freedom (2DoF) Helicopter, respectively, show the efficiency and applicability of the proposed methodology.
Introduction
Mathematical modeling is a set of heuristic and/or computational procedures properly established on a real plant in order to obtain a mathematical equation (models) to represent accurately its dynamic behavior in operation. Depending on the level of a priori insight about the system, the mathematical description can be approached in three different ways: white box modeling, black box modeling and gray box modeling [9,10, 9,10].
– White box modeling: in this case, models can be satisfactorily obtained from the physical laws governing the dynamic behavior of the plant. However, this may be a limiting factor in practice, considering dynamical systems with uncertainties, nonlinearities, time delay, parametric variations, among other dynamic complexity characteristics. The poor understanding of physical phenomena that govern the dynamical systems behavior and the resulting model complexity, makes the white box approach a difficult and time consuming task. In addition, a complete understanding of the physical behavior of a real plant is almost impossible in many practical applications.
– Black box modeling: in this case, corresponding to the scope of this paper, is necessary the task of extracting a model from experimental data correlated to dynamic behavior of the system. The modeling problem consists in choosing an appropriate structure for the model, so that enough information about the dynamic behavior of the systems can be extracted efficiently from the experimental data. Once the structure was determined, there is the parameters estimation problem so that a quadratic cost function of the approximation error between the outputs of the dynamical systems and the model is minimized. This problem is known as systems identification and several techniques have been proposed for linear and nonlinear dynamical system modeling. The proposed approach is in these contexts, and it is based on evolving clustering of experimental data.
– Gray box modeling: in this case some information on the dynamic behavior of the systems is available, but the model structure and parameters must be determined from experimental data. This approach, also known as hybrid modeling, combines the features of the white box and black box approaches.
In the models that is necessary to include state variables from a dynamic system, algorithms for state estimation used aim to recover some desired state variables from a dynamic system with incomplete measurements and/or in the presence of noise. State estimation is a significant problem in the area of control and signal processing, with many important researches. In 1940, Wiener, founder of the modern theory of statistical estimation, established the Wiener filtering theory, which solves the problem of estimation with minimum variance for stationary stochastic dynamical systems. In the early 1960s, Kalman filtering theory was developed from a novel recursive filtering algorithm which did not require the assumption of stationarity, and it was applicable only to linear systems [8, 36].
In the original work, Kalman proposed a new optimal filtering approach for the problem of dynamic models in discrete time with measurements in the noise presence; Kalman and Bucy presented a filtering solution for the problem in continuous time domain; Falb presented the Kalman-Bucy filter in continuous time domain and infinite dimension [25].
Once that Kalman filter theory is applicable only to linear systems, many researchers have been motivated in extending Kalman filtering theory to nonlinear systems. The Extended Kalman Filter (EKF), first proposed by Stanley F. Schmidt [32], applies KF to nonlinear systems through the linearization of nonlinear models. Although EKF be an efficient recursive algorithm and widely used for nonlinear systems estimation, it has some limitations: efficiency is guaranteed only in quasi-linear systems in the updates time scale; linearization can be only applied if the Jacobian matrix exists; computation of Jacobian matrices can be very difficult process and susceptible to errors, in some applications; limitations in implementation, tuning and reliability. To overcome these problems, Julier and Uhlmann proposed the UKF (Unscented Kalman Filter) [29]. The UKF is a nonlinear estimation method that propagates information about mean and covariance of parameters, recursively, through a nonlinear transformation. It is a direct extension of the Unscented Transformation (UT) for recursive estimations. The sigma points (state vectors) capture statistics, once UKF does not require the computing of Jacobian matrices like to EKF. The UKF is an accurate method of nonlinear estimation, so it has been widely applied in control of nonlinear systems [30]. Although the UKF be more accurate than EKF, it still has some limitations from the classical KF: in some applications, the incompatibility between the noise characteristic of a real dynamic system and the filter, is observed; added to this, UKF can respond slowly to sudden disturbance, decreasing filter performance. Attempting to overcome these limitations, many adaptive techniques of Kalman filtering, which guarantee robustness to uncertainties and disturbances, are observed in the literature. In [12], an adaptive KF approach is proposed for stochastic short-term traffic flow rate prediction. In [2], a study of satellite motion estimation algorithm is performed, with fault detection. In [16], a new method for the estimation of the prediction-error covariances of a Kalman filter (KF), which is suitable for step-varying processes, is proposed. In [18], an Asynchronous Adaptive Direct Kalman Filter (AADKF) algorithm for underwater integrated navigation system, is developed.
Since 1980, fuzzy systems have been applied in modeling and control of real dynamic systems, for which the Takagi-Sugeno (TS) inference systems has recently become a powerful tool [15]. In this context, the fuzzy Kalman filter has received great prominence due to its robustness to uncertainties and disturbances within the experimental data. In [3], a sensor fusion algorithm that integrates gyroscope and vision measurements using an adaptive complementary Kalman filter to estimate the attitude of a hybrid head tracker system, is presented. The fading factor is tuned by fuzzy logic to adapt the Kalman gain of the sensor fusion. In [17], a fuzzy Kalman filtering, based on a hybrid combination of extended Kalman filter and zero order Takagi-Sugeno fuzzy inference system, is presented. The methodology is applied to estimate the location of mobile station in cellular network, where an optimized fuzzy inference system is put forward in order to accurately locate a target using fingerprinting in WiFi based environment. In a fuzzy Kalman filtering, based on a hybrid combination of extended Kalman filter and zero order Takagi-Sugeno fuzzy inference system, is presented. The methodology is applied to estimate the location of mobile station in cellular network, where an optimized fuzzy inference system is put forward in order to accurately locate a target using fingerprinting in WiFi based environment. In [1], an online TS fuzzy modeling methodology based on the extended Kalman filter, is formulated. Several possible alternatives for fitting both antecedents and consequents of the TS fuzzy model, are discussed. Comparative analysis on accuracy and efficiency for modeling the static and dynamic nonlinear systems, are presented. In [34], the collaborative estimation and control problem applied to greenhouse based on frequent environmental changes, are discussed. The sensor transmits a local estimation, based on Kalman filter algorithm to the actuator for data fusion. The fuzzy neural network combined to PID control algorithm allow the reliability of the control action over the greenhouse environmental changes. In [35], a real-time on-line temperature monitoring method for boiler drum, based on the fuzzy adaptive Kalman filter (FAKF) and an order reduction technique, is established. The process noise covariance of the KF is adjusted by fuzzy inference system, improving the stability of the results. In [13], a new adaptive Kalman filter algorithm to cope with the unknown a priori covariance matrix of process noise for discrete time linear dynamic systems, is proposed. The algorithm shows a simple recursive form and great performance. The validation and applicability of the method are shown from results on simulation of one-dimensional space navigation system.
In mid-2002, the evolving fuzzy systems emerged as a version of fuzzy systems with adaptive adjustment of parameters and structure [5, 22]. Since then, this type of advanced fuzzy system has been of great interest from academy and industry. In [6], achievements and open issues on interpretability of evolving fuzzy systems (EFS), are presented. The online complexity reduction approaches and criteria for the interpretability of expert-based and standard data-driven fuzzy systems in batch mode, are examined. Finally, new ways of making EFS more transparent and interpretable within the scope of distinguishability, simplicity, consistency, coverage and completeness, feature importance levels, rule importance levels and interpretation of consequents, are discussed. A key requirement from these investigations is the availability of all concepts for online usage, i.e., they should be incremental or at least allow fast processing. In [23], an evolving Tkagi-Sugeno (eTS)-type fuzzy system for object tracking in video streams, based on RDE (Recursive Density Estimation), is proposed. The methodology has proven to be significantly (in an order of magnitude) faster and computationally more efficient for online and real-time applications. In [26], a new evolving Takagi - Sugeno -Kang (TSK) fuzzy model dedicated to crane systems, is presented. The online identification algorithm offers rule bases and parameters which continuously evolve modifying existing rules and parameters, resulting in a methodology more simple and consistent with both training data and testing data compared to other TSK fuzzy models. In [7], a new methodology for learning evolving fuzzy systems (EFS) from data streams in terms of online regression/system identification problems, is proposed. The methodology presents online complexity reduction on rule level, integrates a new merging concept based on a combined adjacency - homogeneity relation between two clusters (rules), provides reduced rule lengths (improving interpretability) and overcomes the curse of dimensionality effect in incremental and soft (smooth) manner (improving stability and accuracy), improving the accuracy with lower rule base complexity as well as smaller rule length. In [27], a new evolving fuzzy system referred to as evolving Heterogeneous Fuzzy Inference System (eHFIS), which can simultaneously perform local input selection and system identification in an evolving and integrative manner, is proposed. In [28], a Self-evolving Probabilistic Fuzzy Neural Network with Asymmetric Membership Function (SPFNN-AMF) controller for the position servo control of a Permanent Magnet Linear Synchronous Motor (PMLSM) servo drive system, is presented. The SPFNN-AMF integrates the advantages of self-evolving NN (neural network), PF (probabilistic fuzzy) logic system, and AMF (asymmetric membership function), and is proposed to handle vagueness, randomness, and time-varying uncertainties of the PMLSM servo drive system during the control process.
However, despite important contributions on fuzzy Kalman filters and Evolving Fuzzy Systems, the integration of both approaches is still open issue. Therefore, in this paper, a novel methodology for modeling of Evolving Fuzzy Kalman Filters from experimental data, is proposed. The mathematical formulation using an evolving Takagi-Sugeno (TS) structure is presented: the offline Gustafson Kessel (GK) algorithm is used for initial parametrization of antecedent of fuzzy Kalman filter inference system, considering an initial data set; and an evolving version of the GK algorithm is developed for online parametrization of antecedent of the fuzzy Kalman filter inference system. A fuzzy recursive version of OKID (Observer/Kalman Filter Identification) algorithm is proposed for parametrizing the matrices A, B, C, D and K (state matrix, input influence matrix, output influence matrix, direct transmission matrix, and Kalman gain matrix, respectively), in the consequent of the fuzzy Kalman filter inference system.
Motivation
Modeling is an important area in science and engineering. The mathematical model is considered as an analytical description of a real dynamic system, with the following aspects: analyzing phenomena; estimating quantities; testing hypotheses; teaching; processing signals (filtering, prediction); controlling processes.
Physically speaking, the experimental data for modeling applications, present dynamic behavior characterized by uncertainties, nonlinearities, time varying, disturbances and non-stationarity, which has attracted the attention from researchers and practitioners in this area as well as motivated several approaches to deal with such complexities.
Despite the wide number of contributions, the proposal of this paper is motivated by smart combination of evolving fuzzy clustering and OKID algorithm, processing experimental data in a robust, adaptive and fast manner, for better representation of a real dynamic system.
Contributions
The main contributions of the proposed methodology regard the following aspects of interest:
Adaptive fully data-driven method suitable to online and real-time applications. The proposed methodology allows the evolving structure adaptation and recursive parameters estimation of the fuzzy Kalman filter. It is interesting from practical point of view, once that the real dynamic systems are nonlinear, time varying or even in non-stationary environments; Fast processing of data streams, minimizing the memory allocation, computational demands and execution time. The parametrization of fuzzy Kalman filter is based on state-space minimum realization theory, i.e., a model with the smallest state-space dimensions among all realizable models that have the same input-output relations for the real dynamic system; Robustness to the uncertainties on the experimental data. A fuzzy recursive OKID (Observer/Kalman filter identification) algorithm is proposed to parametrize the fuzzy Kalman filter, defining local fuzzy regions from experimental data evolving clustering, attenuating the corresponding local uncertainties due to presence of noise and/or outliers.
Structure of the paper
This paper is organized as follows: in Section 2, the parametrization of the evolving fuzzy Kalman filter, is formulated in detail. In Section 3.2, the computational and experimental results, illustrating the efficiency and applicability of the proposed methodology, are presented. Finally, the conclusions are presented in Section 4.
Evolving fuzzy Kalman filter parametric esti- mation: formulation
Fuzzy Kalman filter model
The TS evolving fuzzy Kalman filter presents the i|[i=1,2,…,c]-th rule, given by:
R(i): IF
with
The antecedent estimation by evolving GK clustering algorithm is formulated in this section. Firstly, an offline approach of GK algorithm is formulated for initial estimation of antecedent parameters. After that, the evolving Takagi-Sugeno (eTS) fuzzy systems is used for online estimation of antecedent parameters.
Initial offline estimation
The offline clustering algorithm has been applied to identify an initial set of c clusters from experimental data. The algorithm is described as follow:
Given the data set
The cluster prototypes (means),
In the evolving Takagi-Sugeno (eTS) Fuzzy Systems, the density of the data evaluated recusively around the last data point, D t (z t ), is given by [21]:
The density of the focal points is uptaded recursively, as follow:
Forming representative clusters with high generalization capability can be achieved by analyzing focal points that have high density, checking the Condition A, given by:
If Condition A is attended, form a new focal point (R ← R + 1; zi* ← z t ; D (zi*) ← 1; Ii* ← 1).
To avoid redundancy and to control the level of overlap, condition B is checked, given by:
If Condition B is satisfied, remove the rule for which it holds, because it describes any of the previously existing cluster focal points.
The OKID (Observer / Kalman Filter Identification) method is a direct Kalman filter gain identification approach. It is similar to adaptive Kalman filter, which requires no prior statistical information and does not rely on sample correlation or covariance computations. The OKID method has been successfully applied to several real dynamic systems identification, and it can effectively estimate state-space models from experimental data [31, 33].
The original OKID is formulated in [4]. In this paper, a fuzzy recursive version of the OKID algorithm, is proposed. A fuzzy formulation of the OKID algorithm, has the following steps: given l (number of samples), p (appropriate number of observer Markov parameters from the given set of input-output data),
where:
is the diagonal weighting matrix of membership values from the i-th rule, and
is the observer Markov Parameters of i-th rule.
and
where
where:
and
In this section, some results to illustrate the efficiency and applicability of the proposed methodology, according to the theoretical formulation presented in Section 2, are discussed. For computational and experimental results, a dynamic system and a 2DoF Helicopter, are considered, respectively.
Computational results
To illustrate the efficiency of the proposed methodology, the states and parameter estimation in oscillator system, is given by [14]:
In Fig 1, the results obtained using the proposed methodology in this paper was observed. In [14], the proposed methodology for nonlinear Kalman filtering presents the filter estimated 95% confidence region with a range values between -2 and 2. The proposed methodology in this paper, presents the filter estimated 95% confidence region with a range values between 0.9 and 1.1. The comparative analysis illustrates the efficiency of the proposed methodology through the good performance for tracking of states and the α parameter of in oscillator system.

State and parameter estimation in stochastic oscillator system when α is constant over time. System noise variance of σ2 = 0.1 (total system noise variance of 0.2) considered. Observations (black circles) of the x1 variable are corrupted by observational noise with variance of 0.3 and censored below a value of 0. Dashed black lines denote the true variable/parameter trajectory and dashed grey lines the proposed methodology estimates. Solid grey lines denote the filter estimated 95% confidence region.
In Fig 2 variando, it is observed the estimation in the case when α is not constant over time, however, proposed methodology still presents a accurately track of α, x1 and x2.
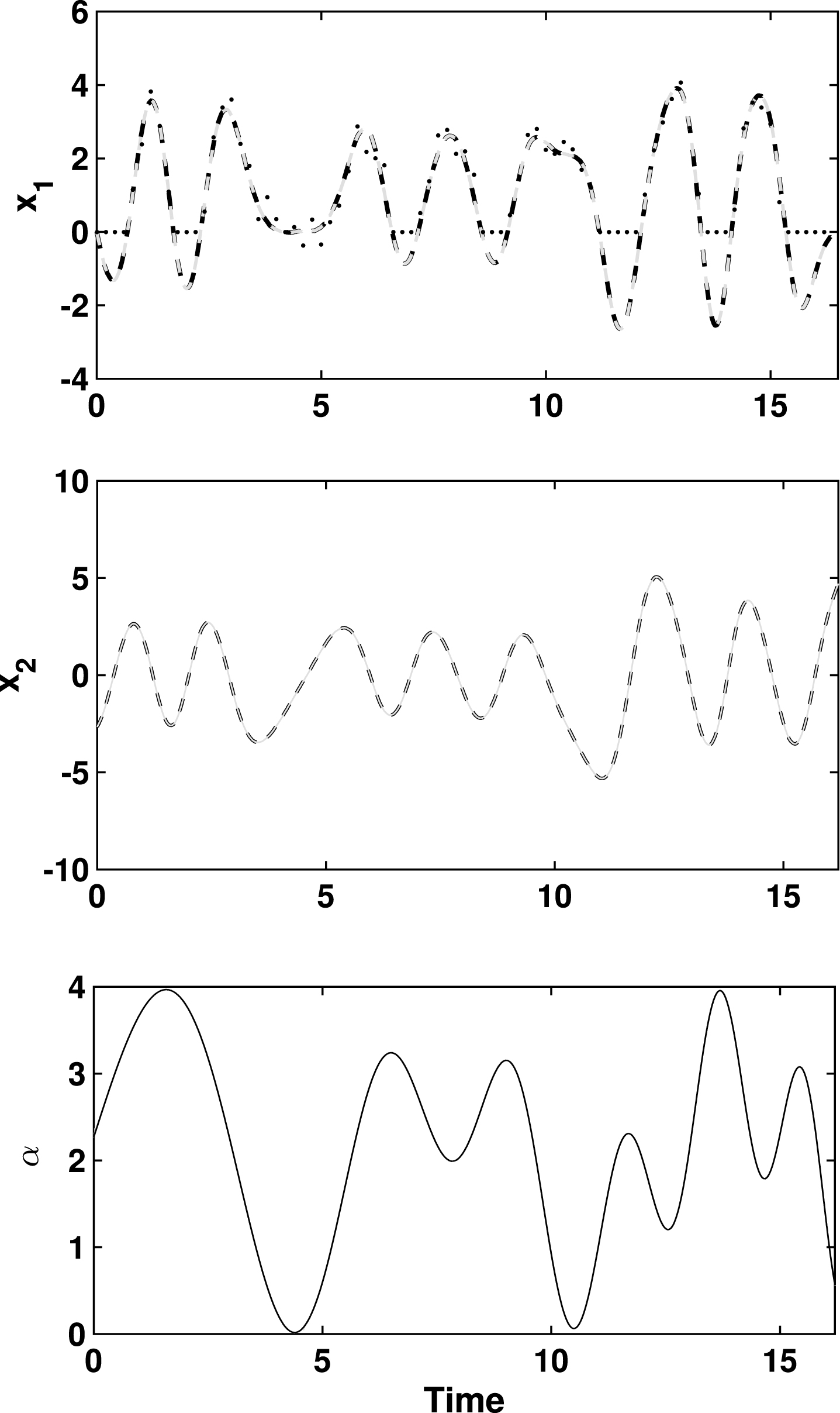
State and parameter estimation in stochastic oscillator system when α is not constant over time. System noise variance of σ2 = 0.1 (total system noise variance of 0.2) considered. Observations (black circles) of the x1 variable are corrupted by observational noise with variance of 0.3 and censored below a value of 0. Dashed black lines denote the true variable/parameter trajectory and dashed grey lines the proposed methodology estimates.
To illustrate the applicability of the proposed methodology, the black-box modeling of a 2DoF Helicopter, as shown in Fig 3 [19, 20], is considered. The experimental block diagram for identification procedure of the 2DOF Helicopter, is shown in Fig 4 [19, 20]: the 2DOF Helicopter is horizontal when the pitch angle equals 0, the pitch angle increases positively, ϑ(k) > 0 for F p > 0 and when the nose is move upwards, the yaw angle increases positively, φ(k) > 0 for F y > 0 and when the body rotates in the clockwise direction. The 2DOF Helicopter has two input variables, that is, the main rotor u θ and tail rotor u ϑ ; and two output variables, that is, the yaw angle y θ and pitch angle y ϑ .

2DoF Helicopter [20].
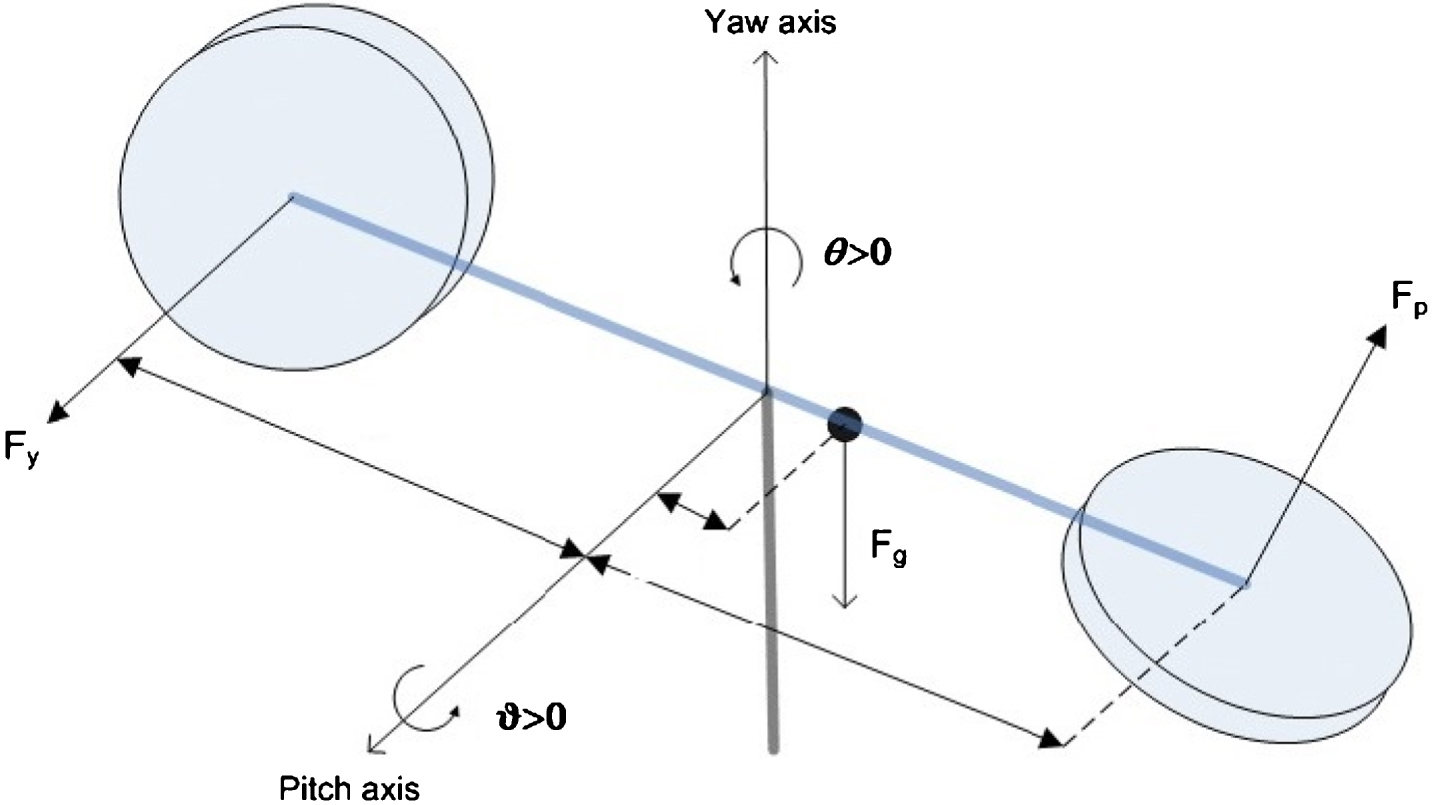
Diagram of 2DoF Helicopter [20].
The signals applied to the main rotor and the tail rotor of the 2DOF Helicopter, are shown in Figs. 5 and 6, respectively. The fuzzy Kalman filter has been trained using 81 first samples by offline GK clustering algorithm with the following aspects: c = 2 (number of clusters) and ∊ = 10-6 (termination tolerance). From sample 82 to 700, the evolving GK clustering algorithm and the fuzzy recursive OKID algorithm (described in Section 2) has been used for parametrization of the fuzzy Kalman filter, which is applied to estimate the outputs and states of the 2DoF Helicopter. The TS Evolving Fuzzy Kalman Filter presents the i|[i=1,2,…,c] rule, given by:
R(i): IF
where
with
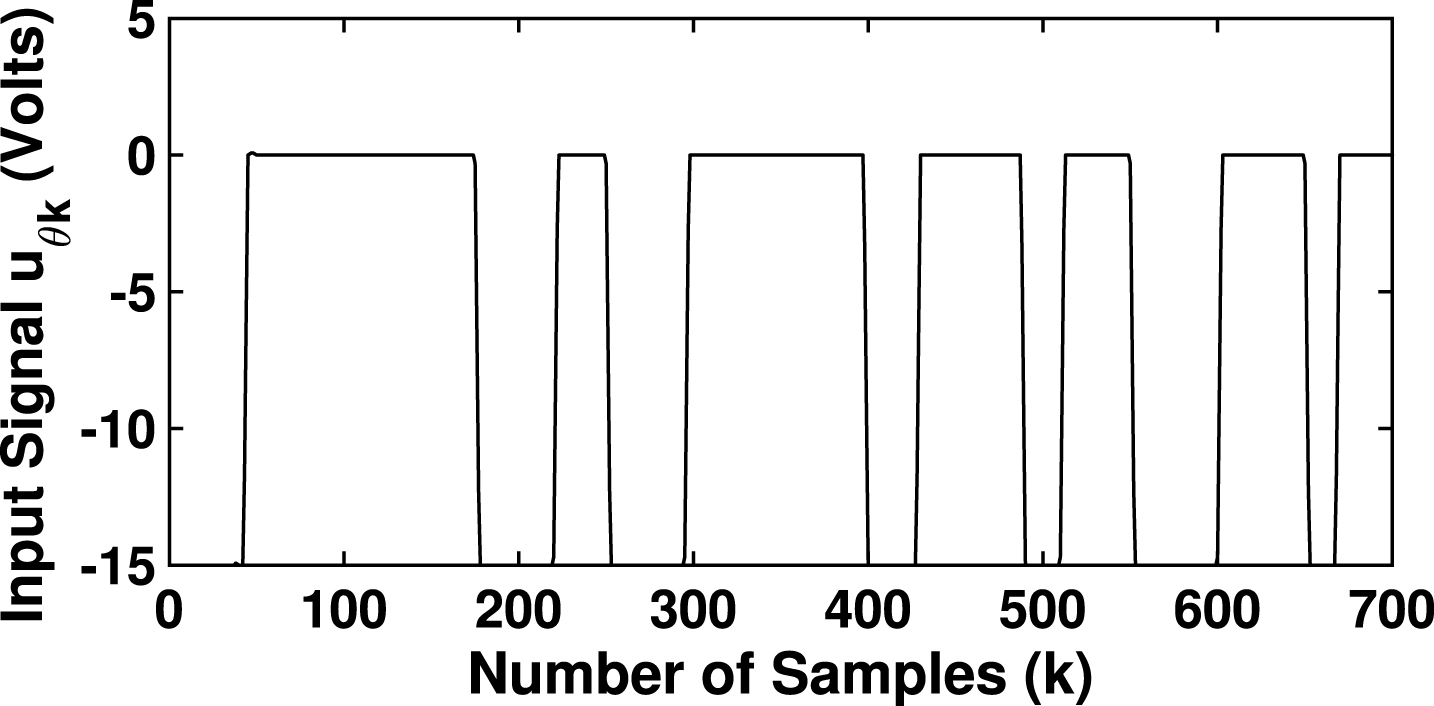
Input signal
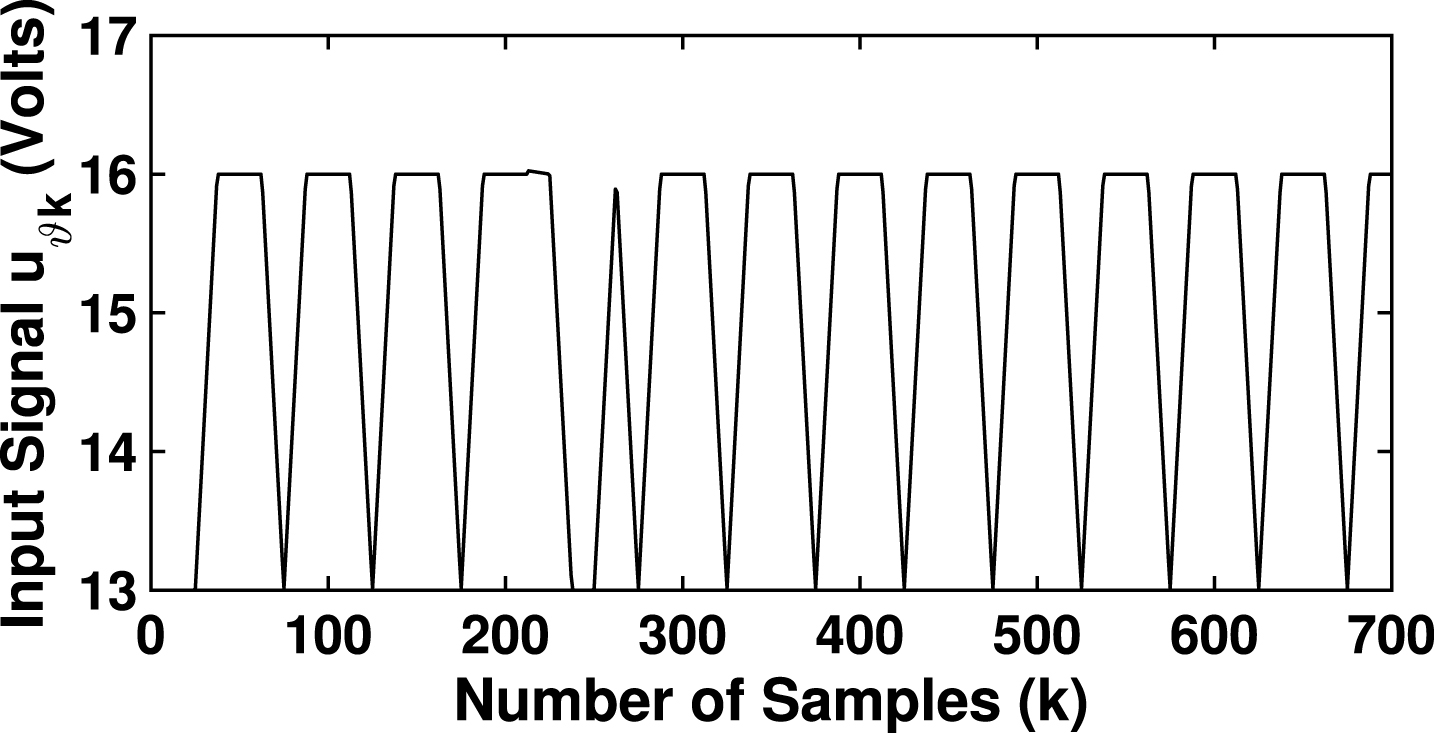
Input signal
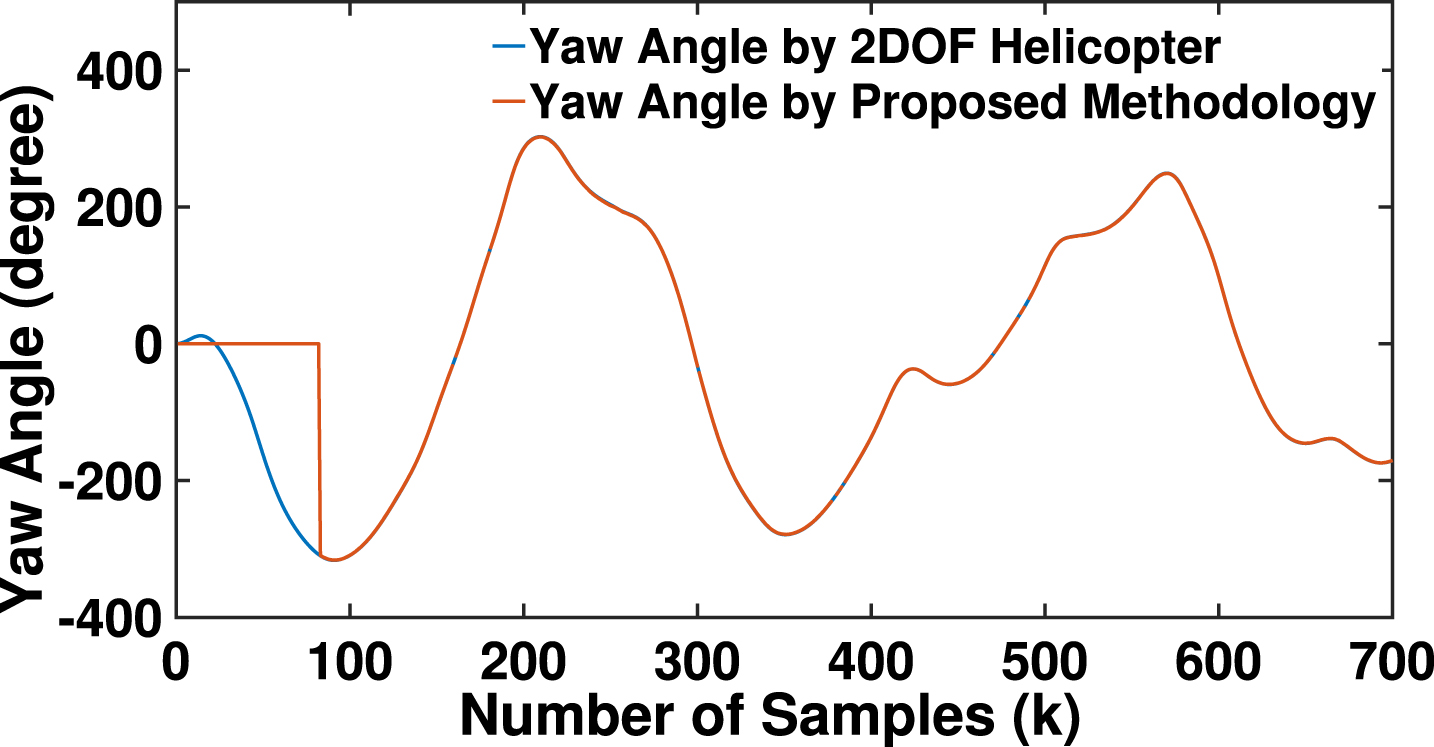
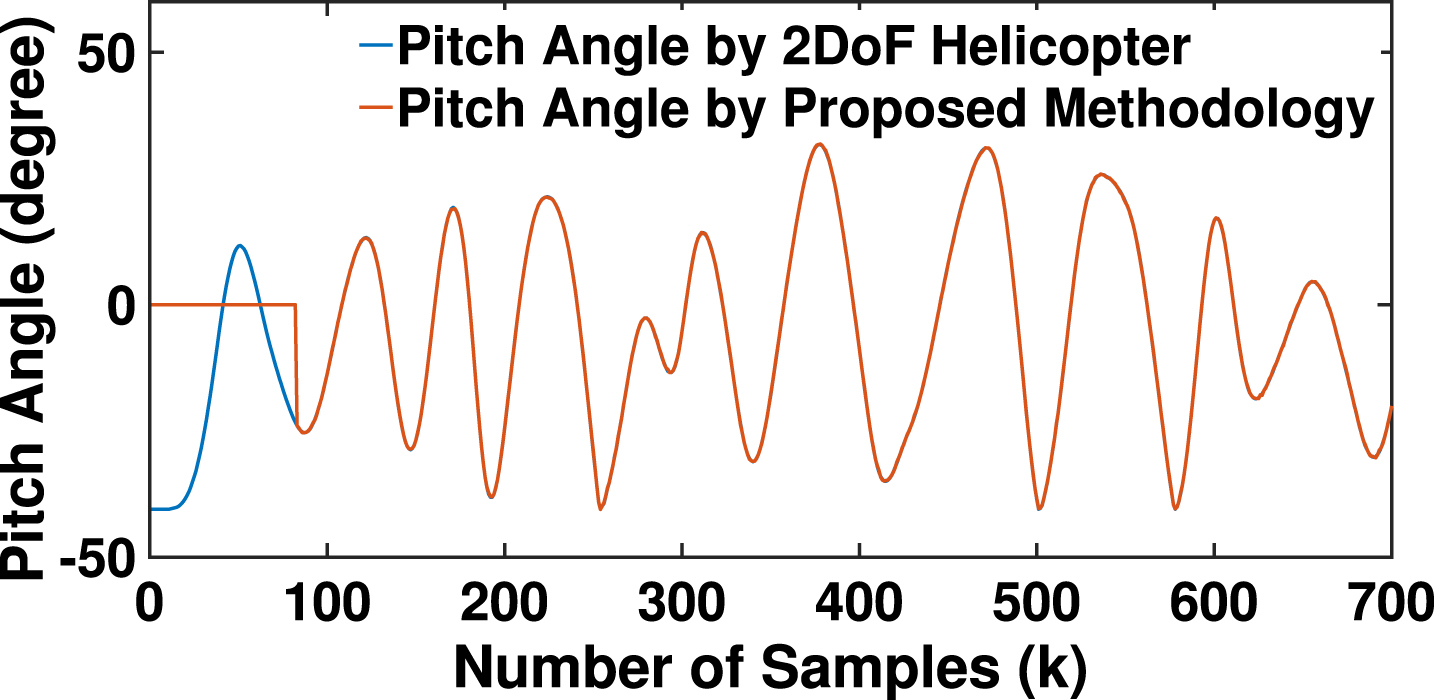
The tracking of outputs of the 2DOF Helicopter, yaw angle
Output signal
Output signal
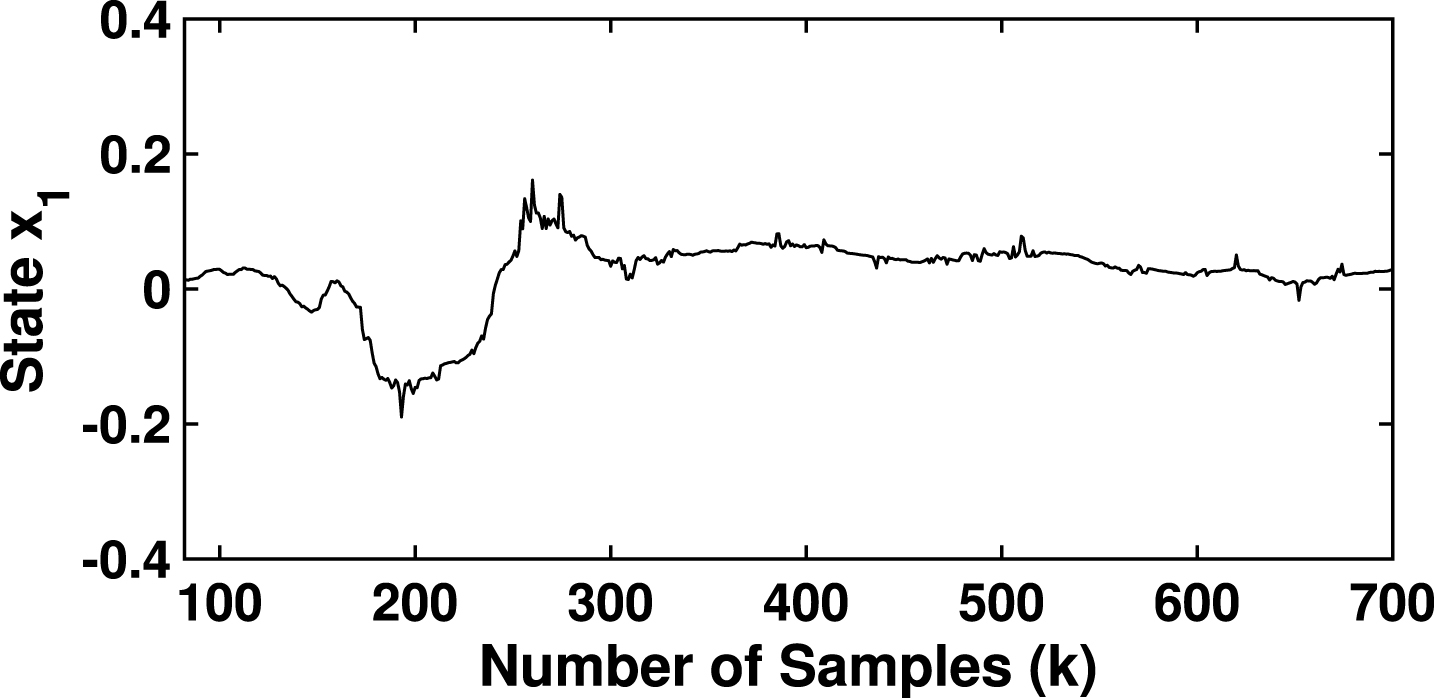
Recursive estimation of state x1.

Recursive estimation of state x2.
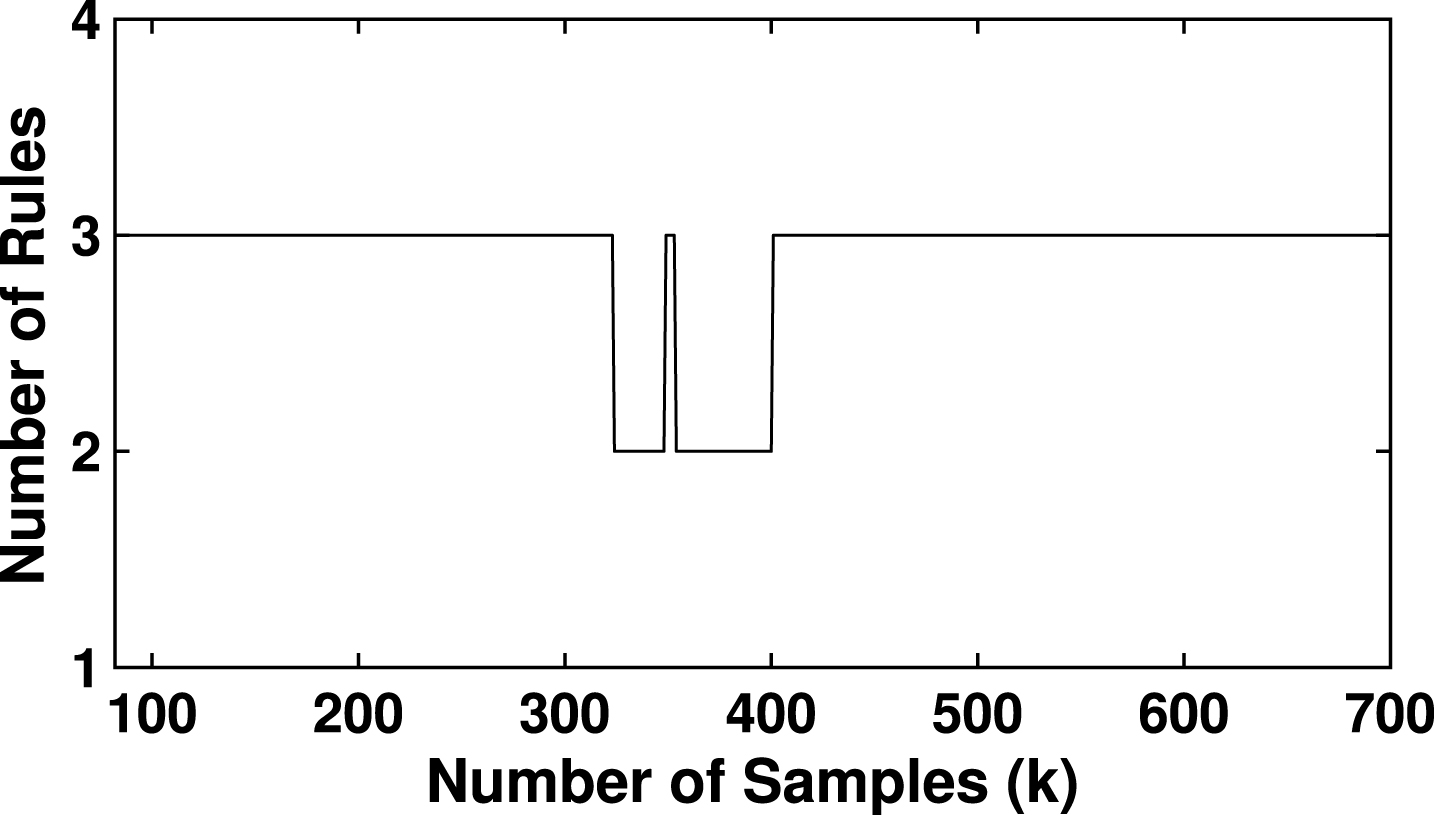
Evolving behavior of rules in the fuzzy Kalman filter.

Instantaneous behavior of normalized membership degrees in the fuzzy Kalman filter inference system.
The instantaneous eigenvalues from the recursive estimation of matrix

Instantaneous eigenvalues of rule 1.
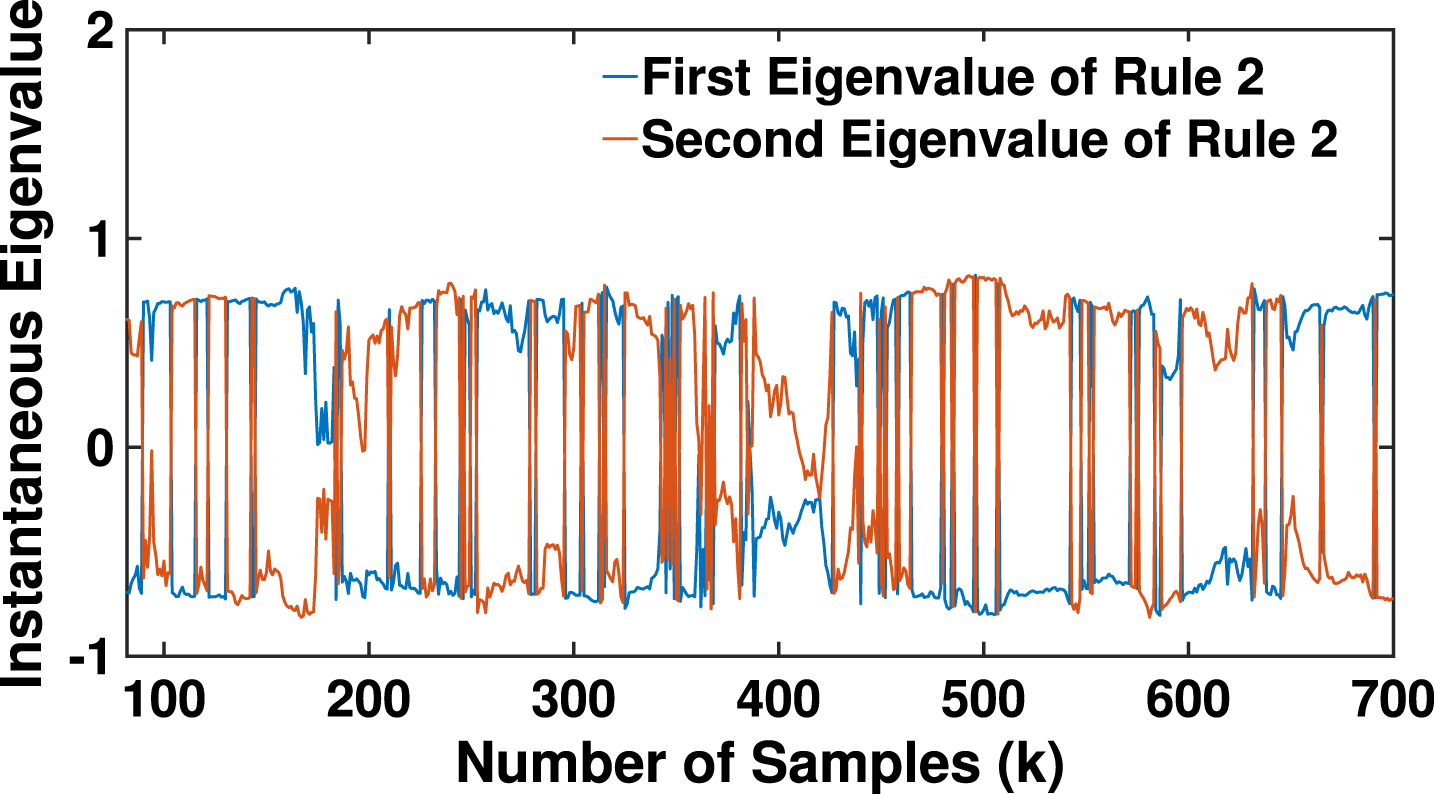
Instantaneous eigenvalues of rule 2.

Instantaneous eigenvalues of rule 3.
The recursive estimation of matrices
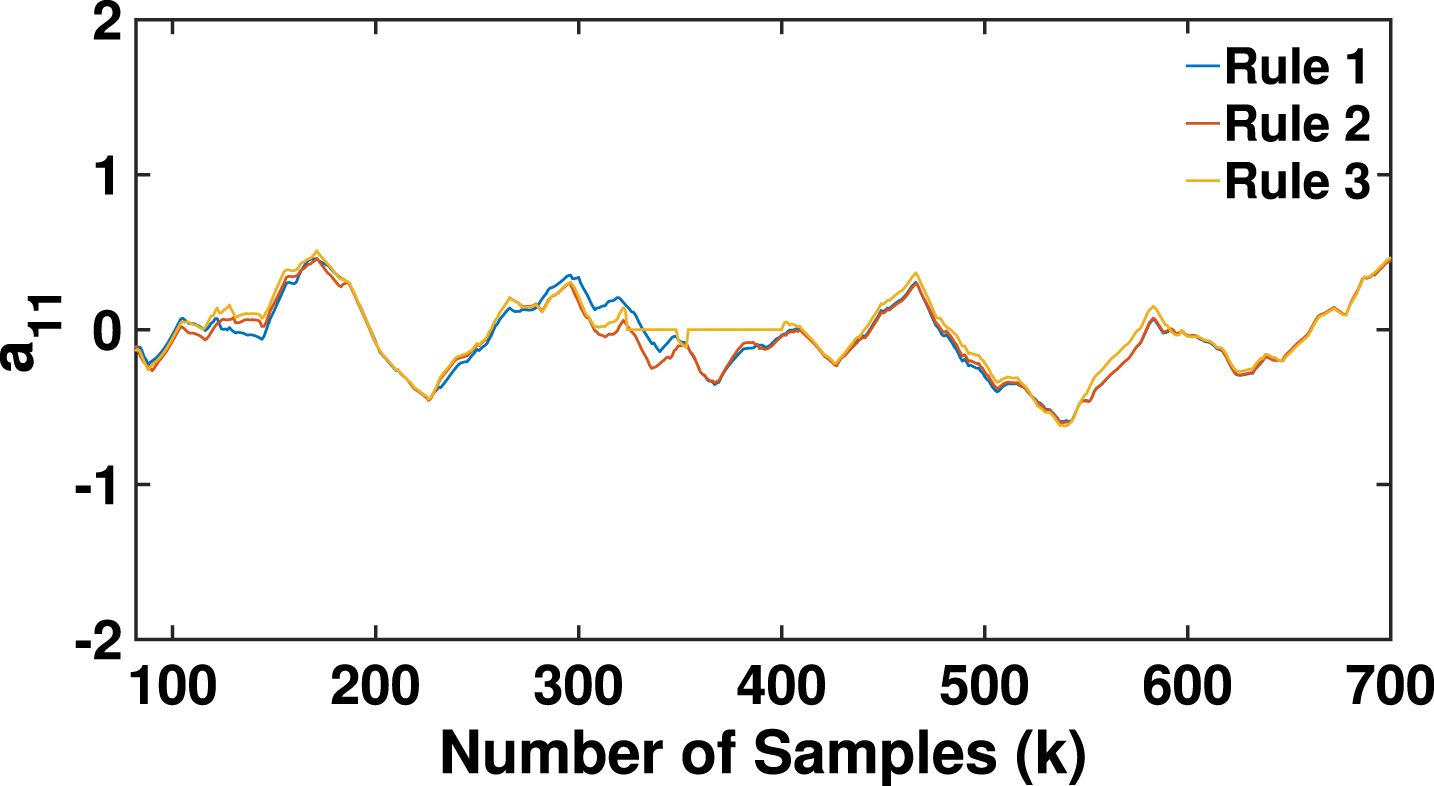
Element a11 of matrix A.
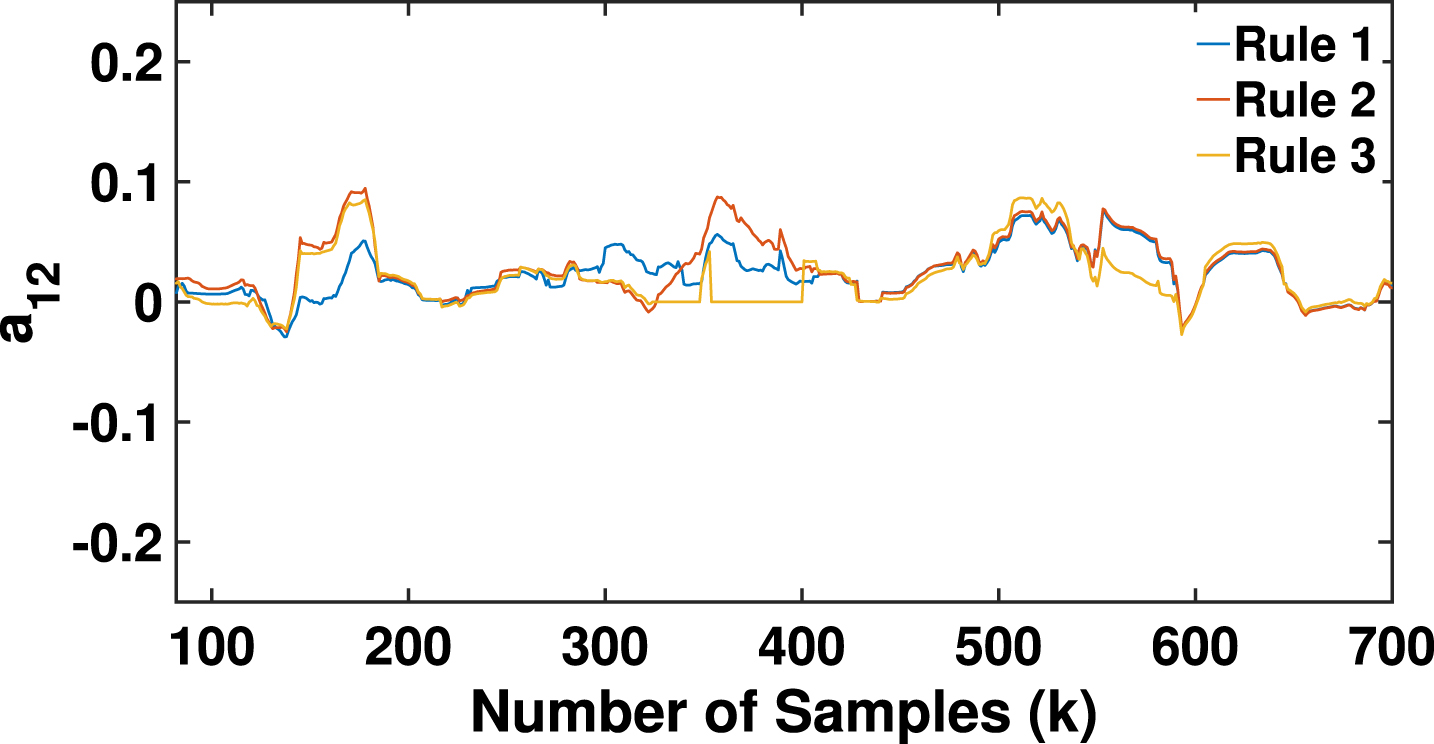
Element a12 of matrix A.
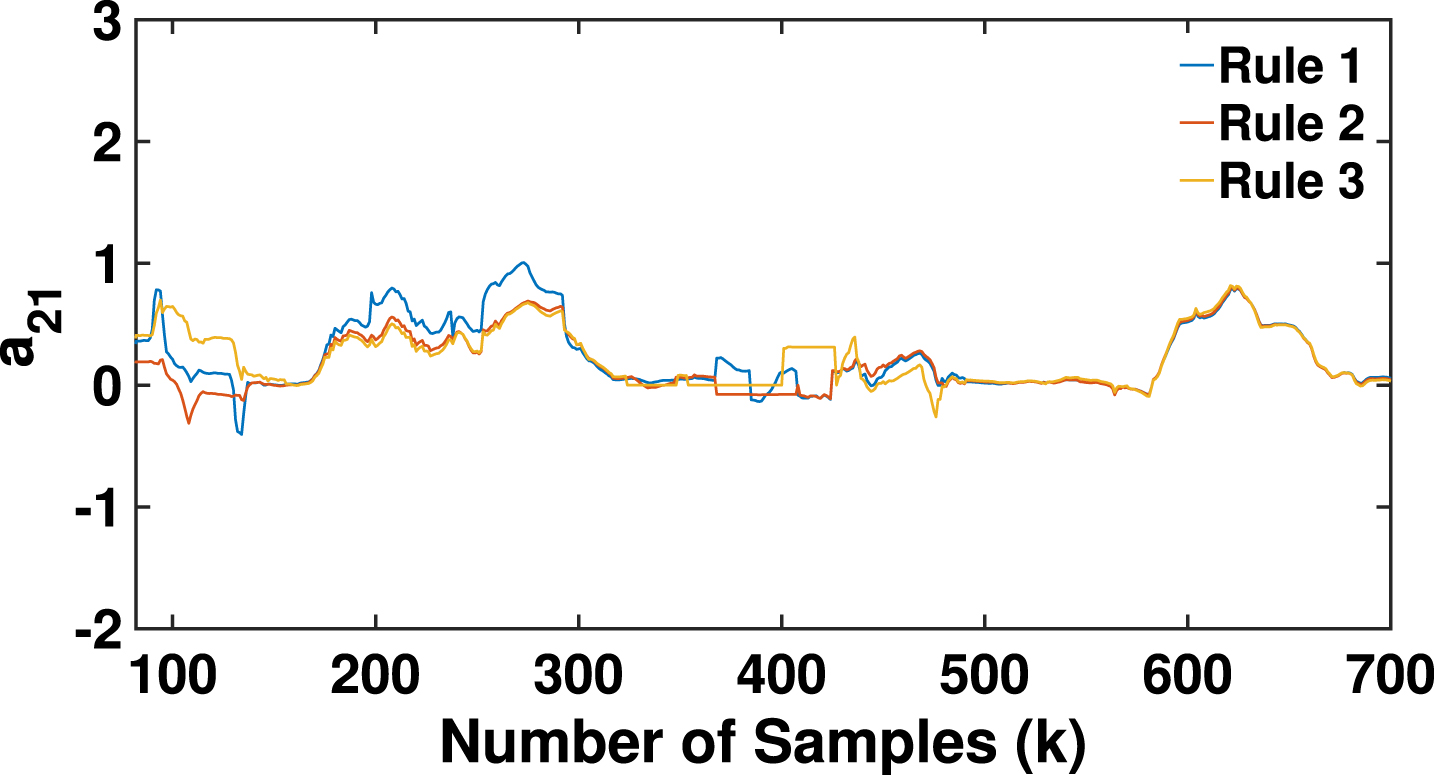
Element a21 of matrix A.

Element a22 of matrix A.
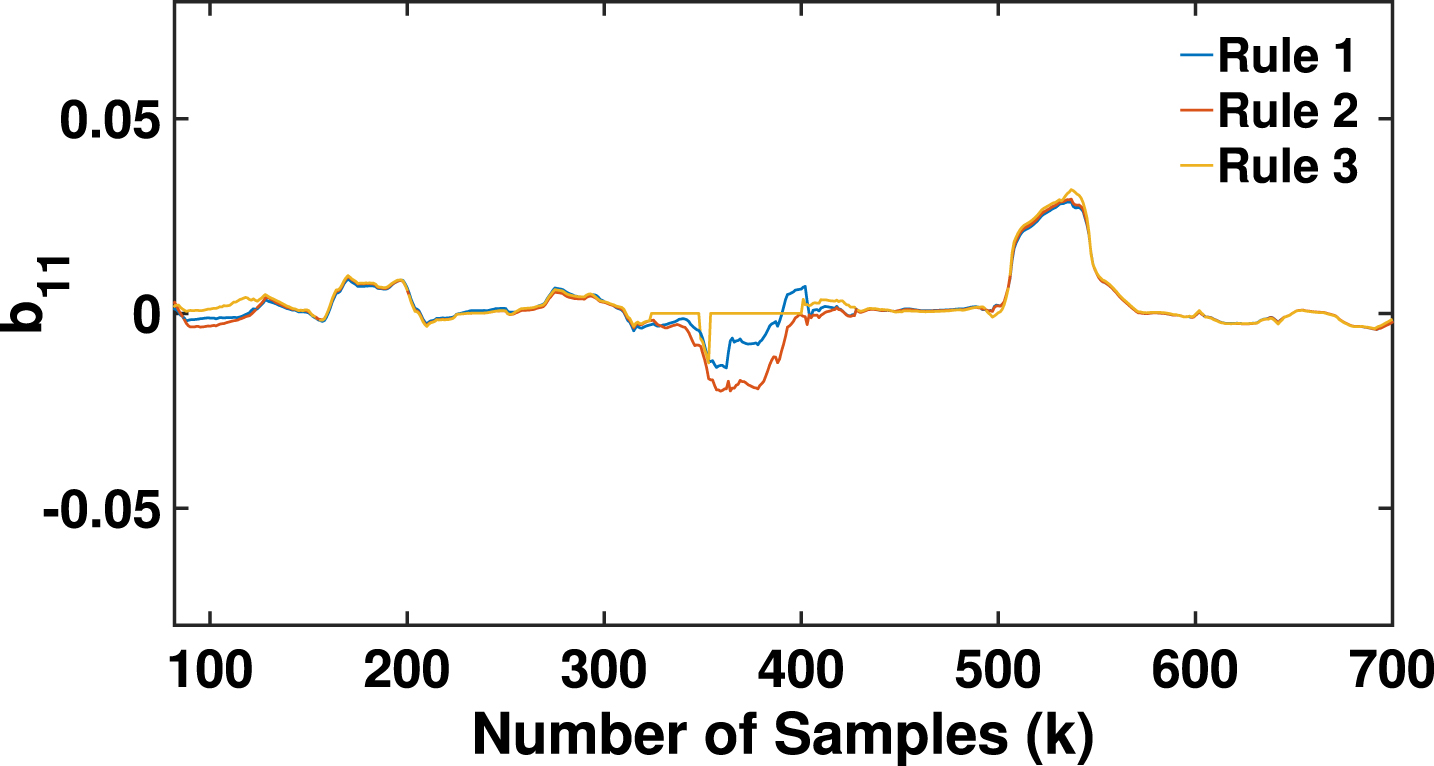
Element b11 of matrix B.

Element b12 of matrix B.
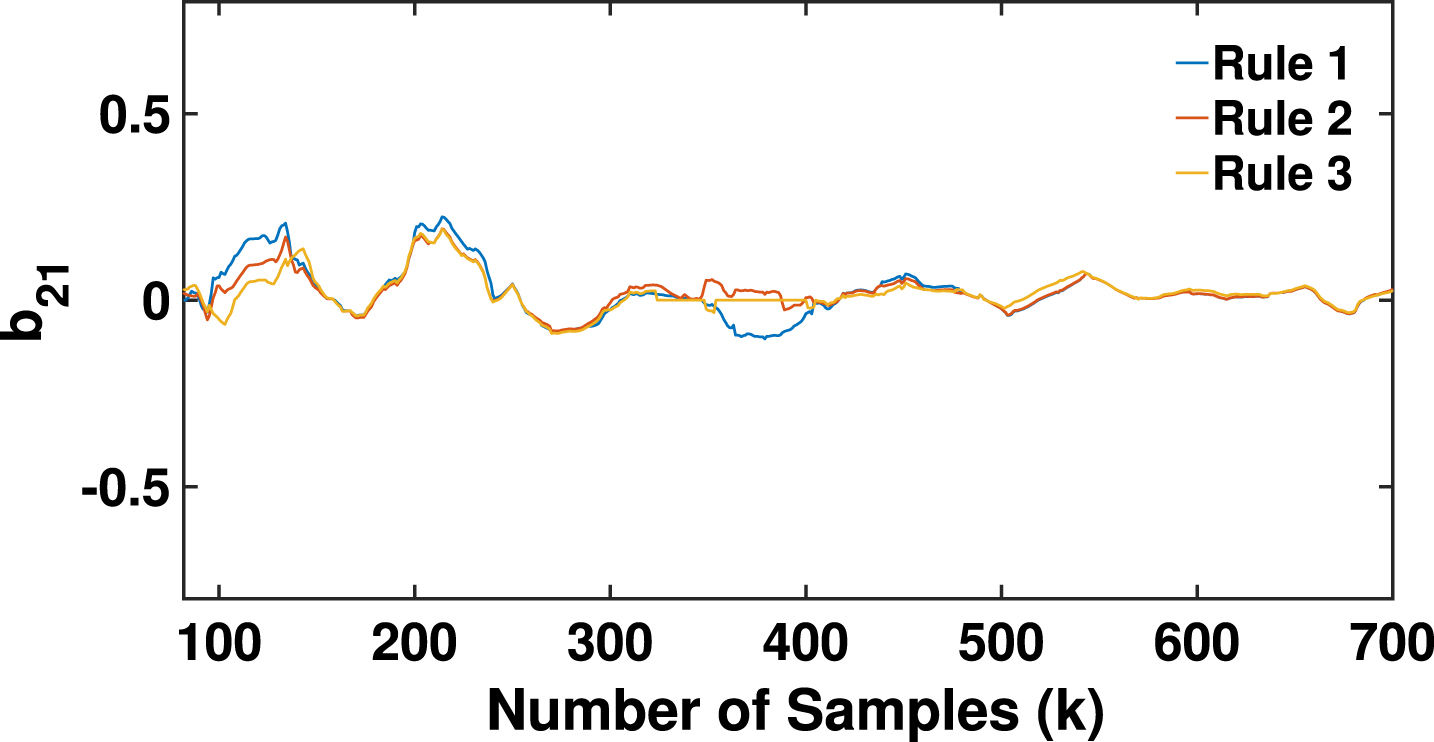
Element b21 of matrix B.
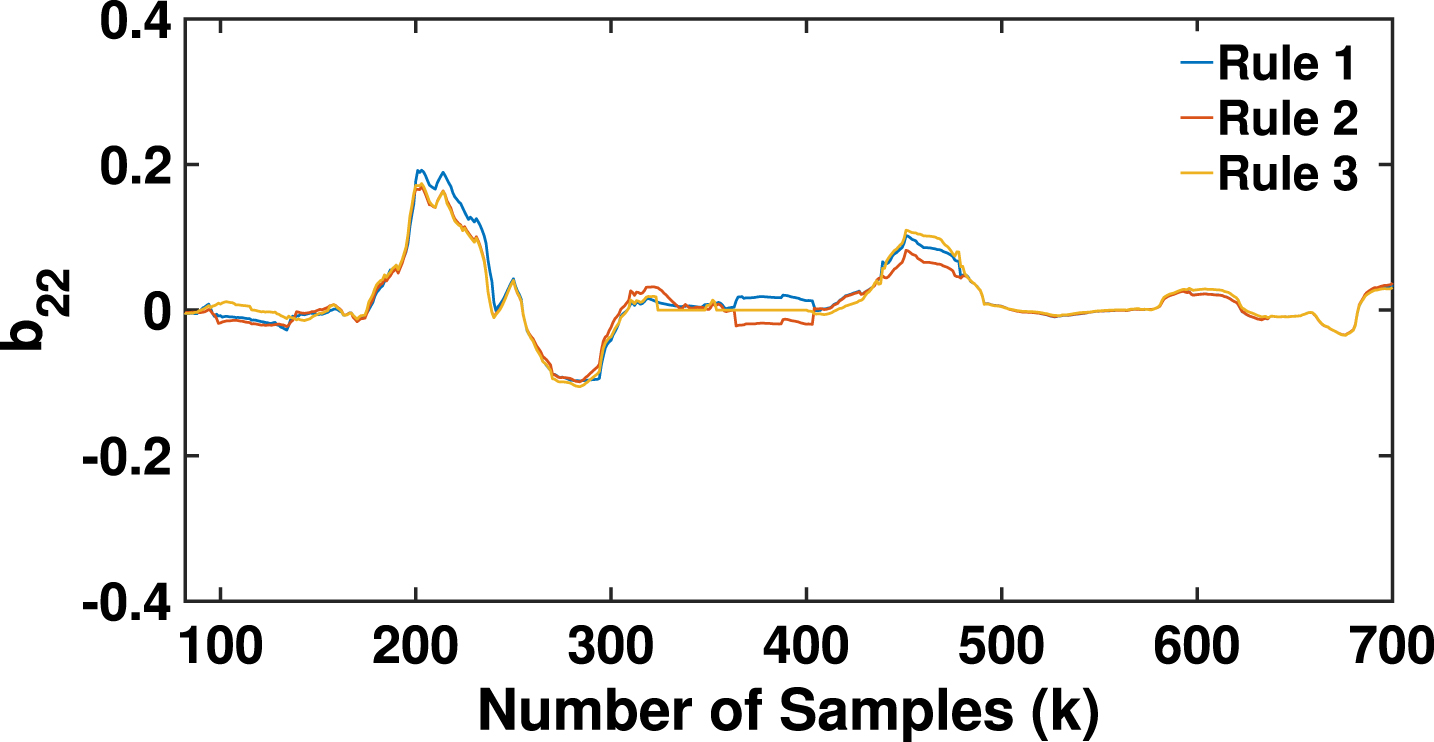
Element b22 of matrix B.
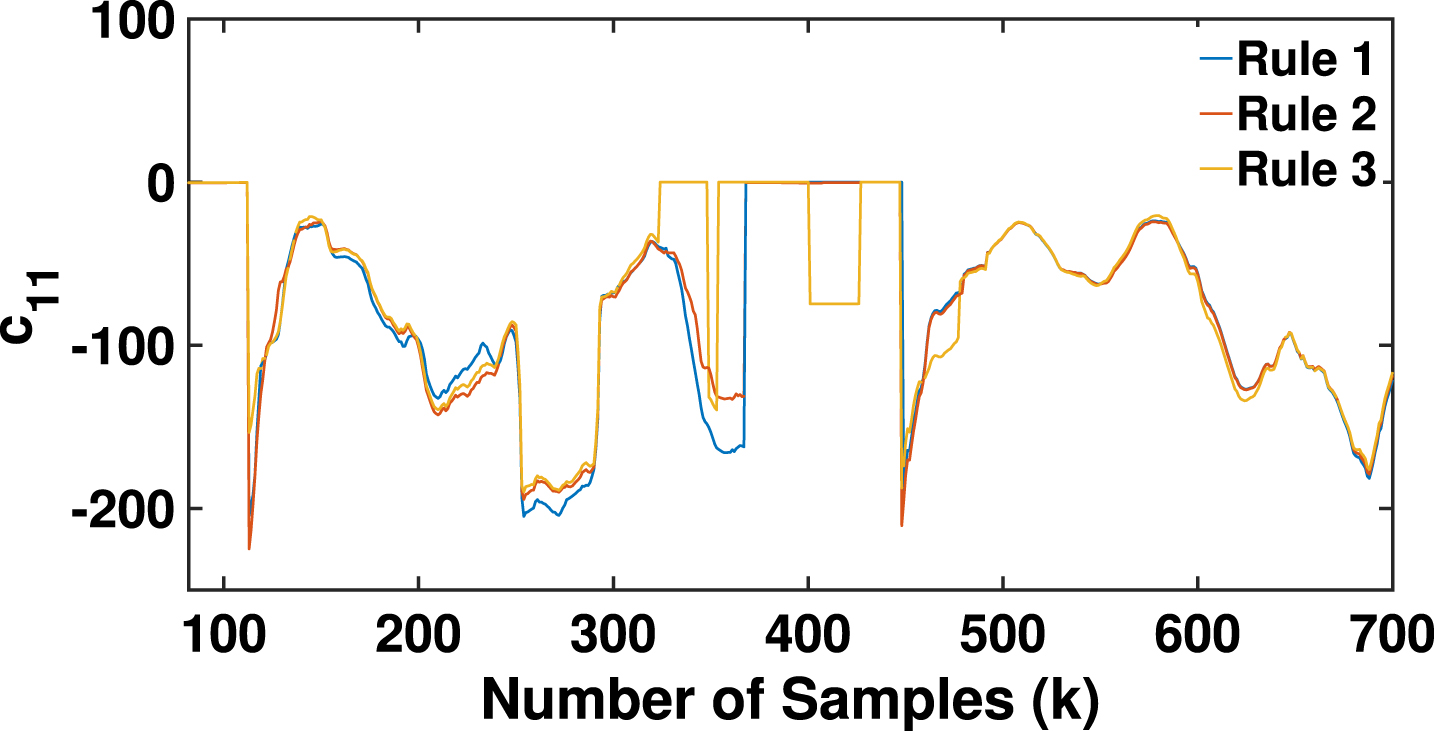
Element c11 of matrix C.
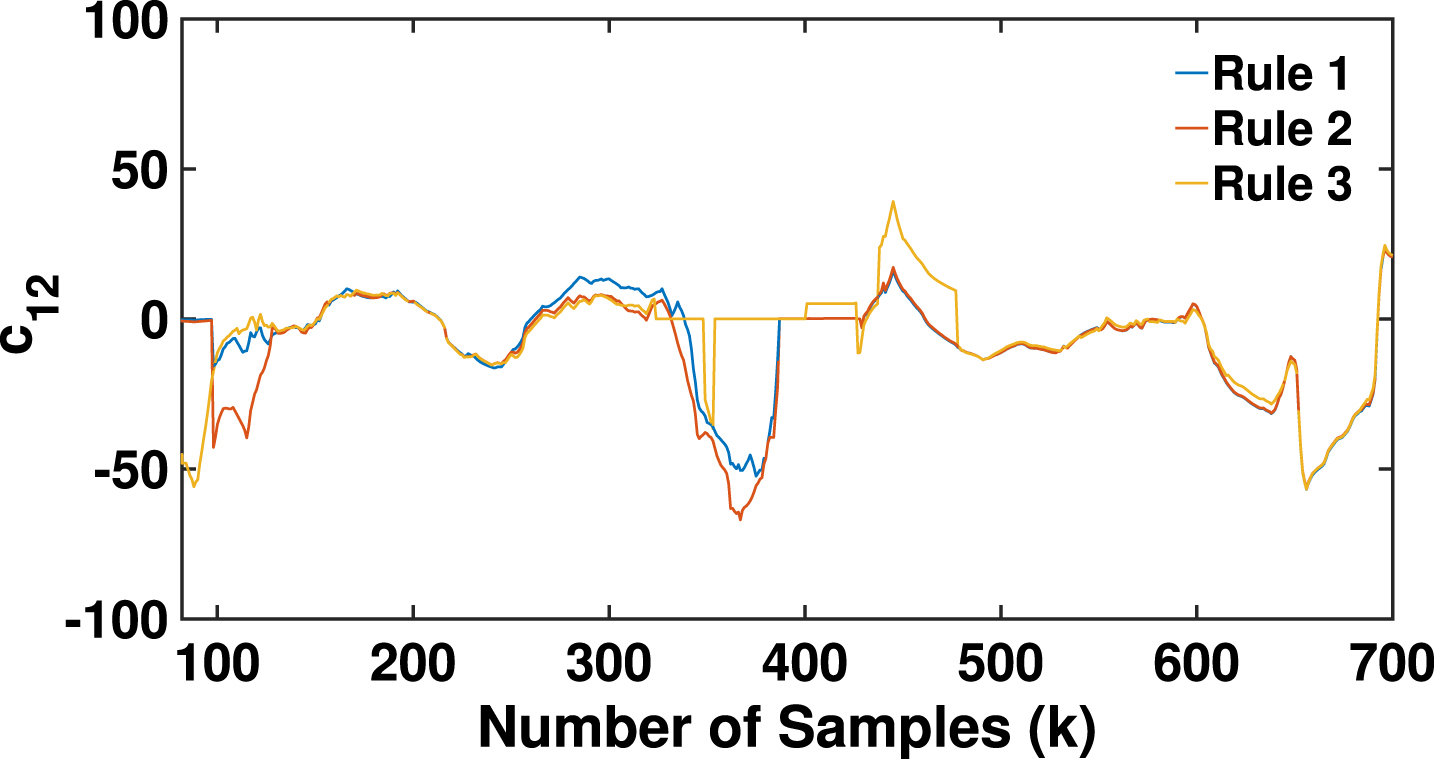
Element c12 of matrix C.
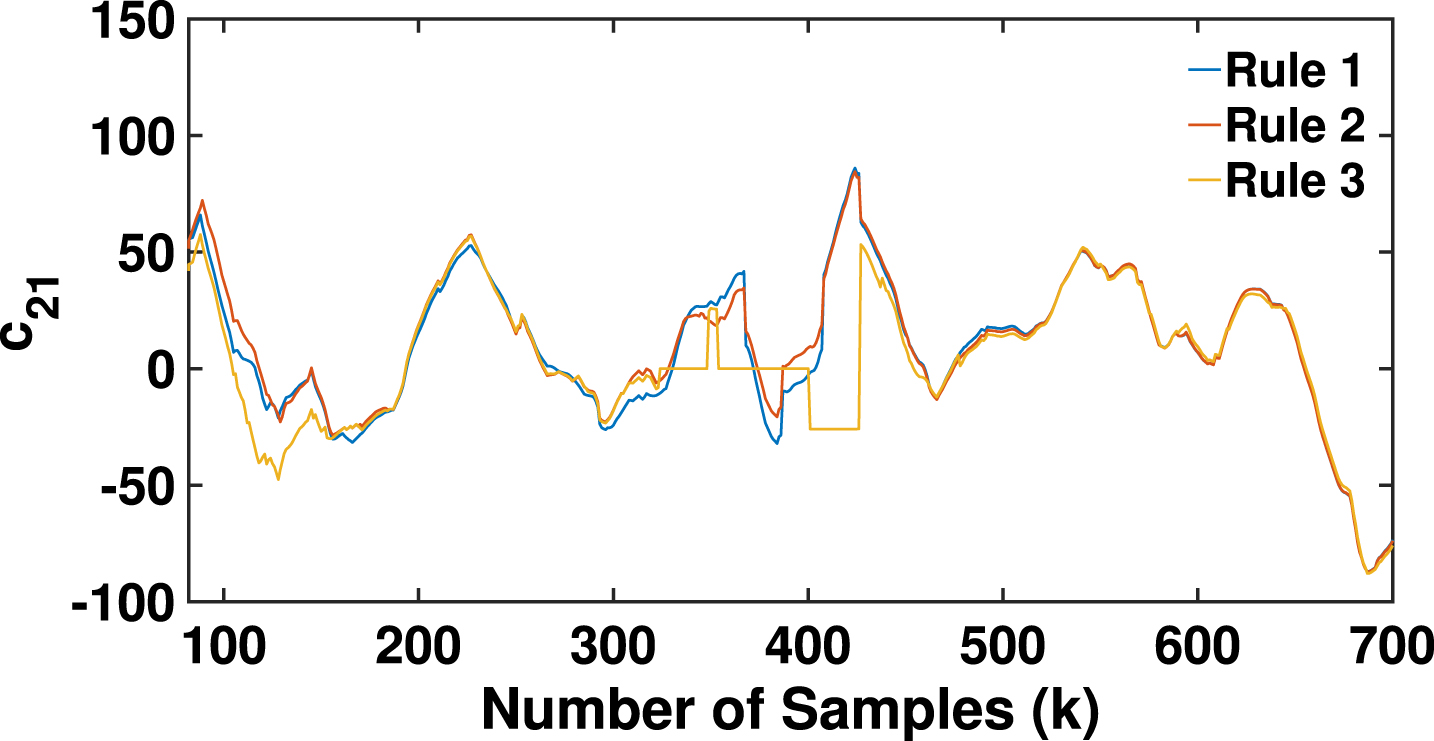
Element c21 of matrix C.

Element c22 of matrix C.
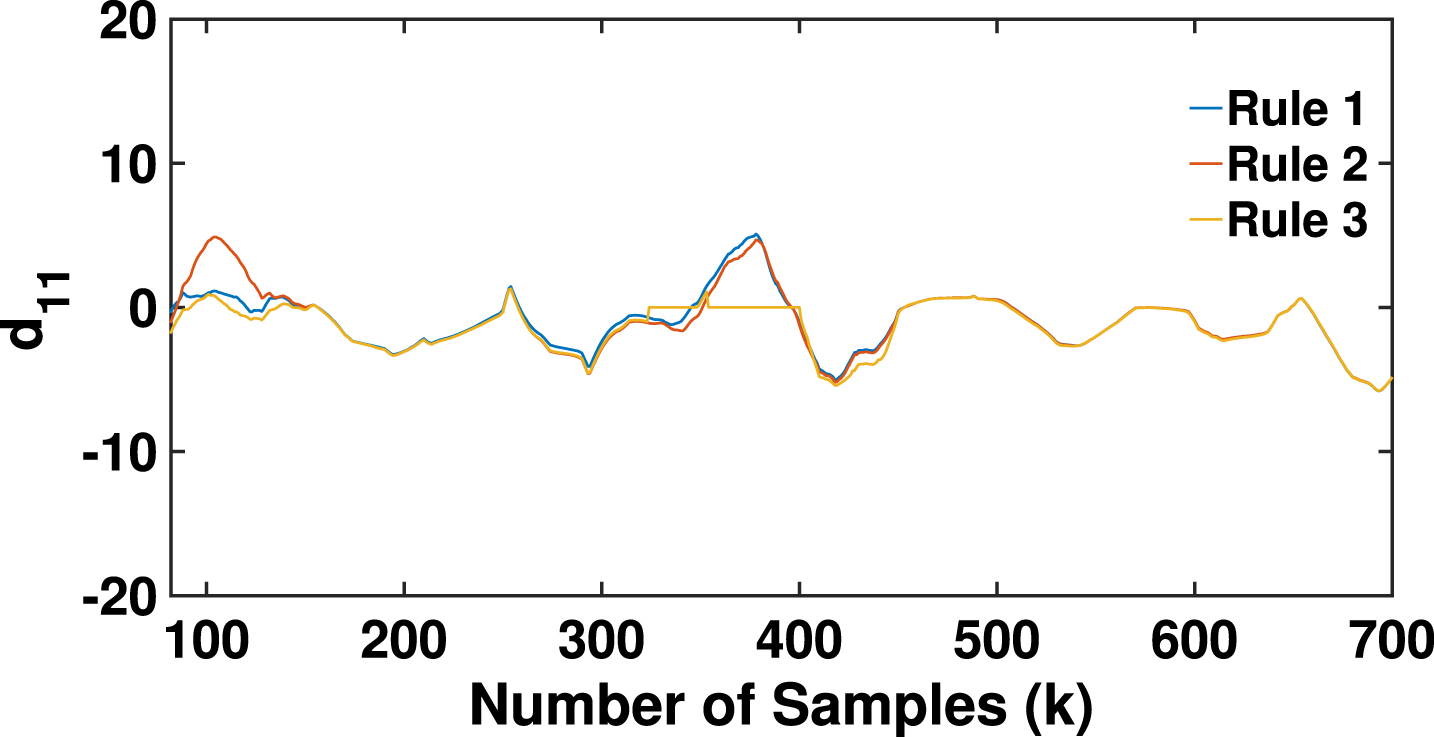
Element d11 of matrix D.
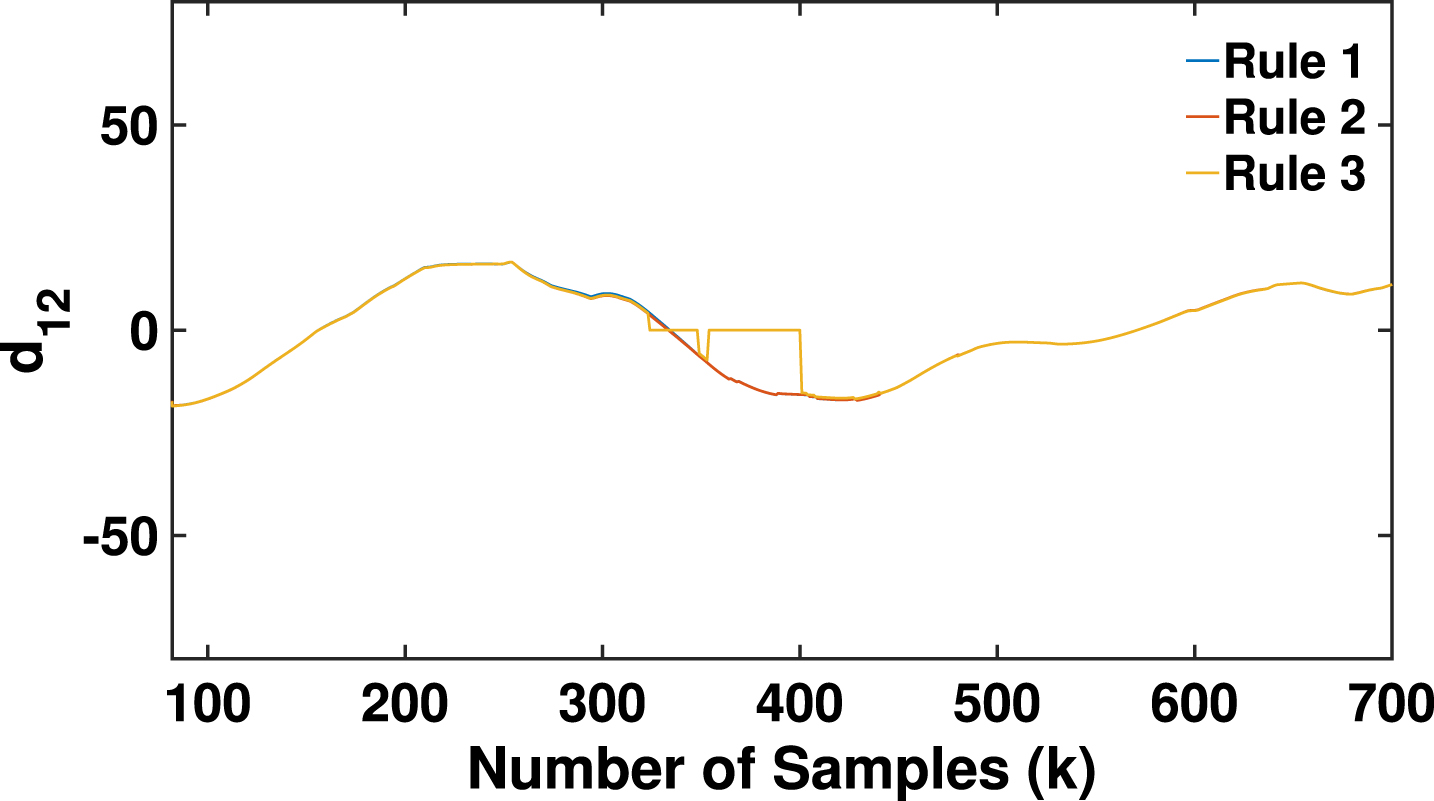
Element d12 of matrix D.

Element d21 of matrix D.
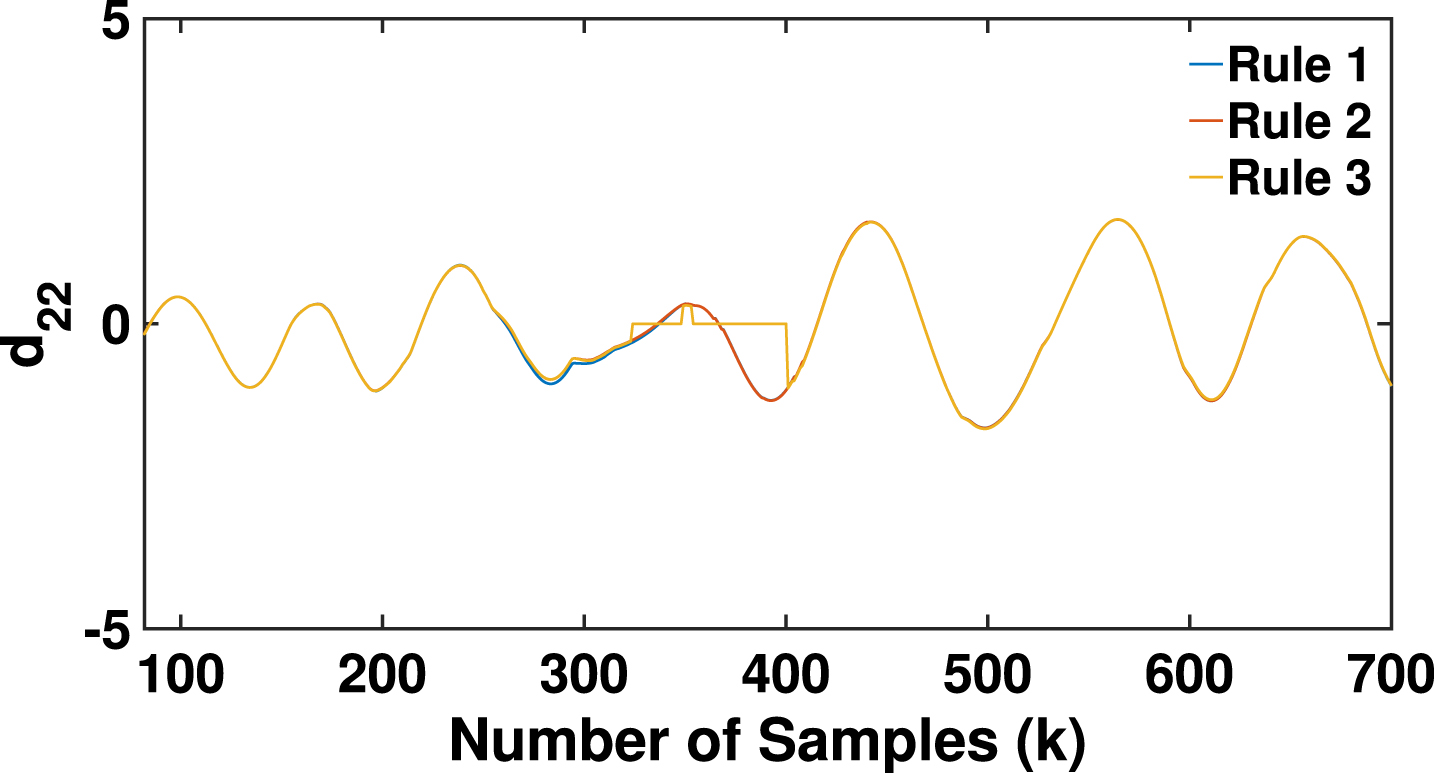
Element d22 of matrix D.

Element K11 of Kalman gain matrix.
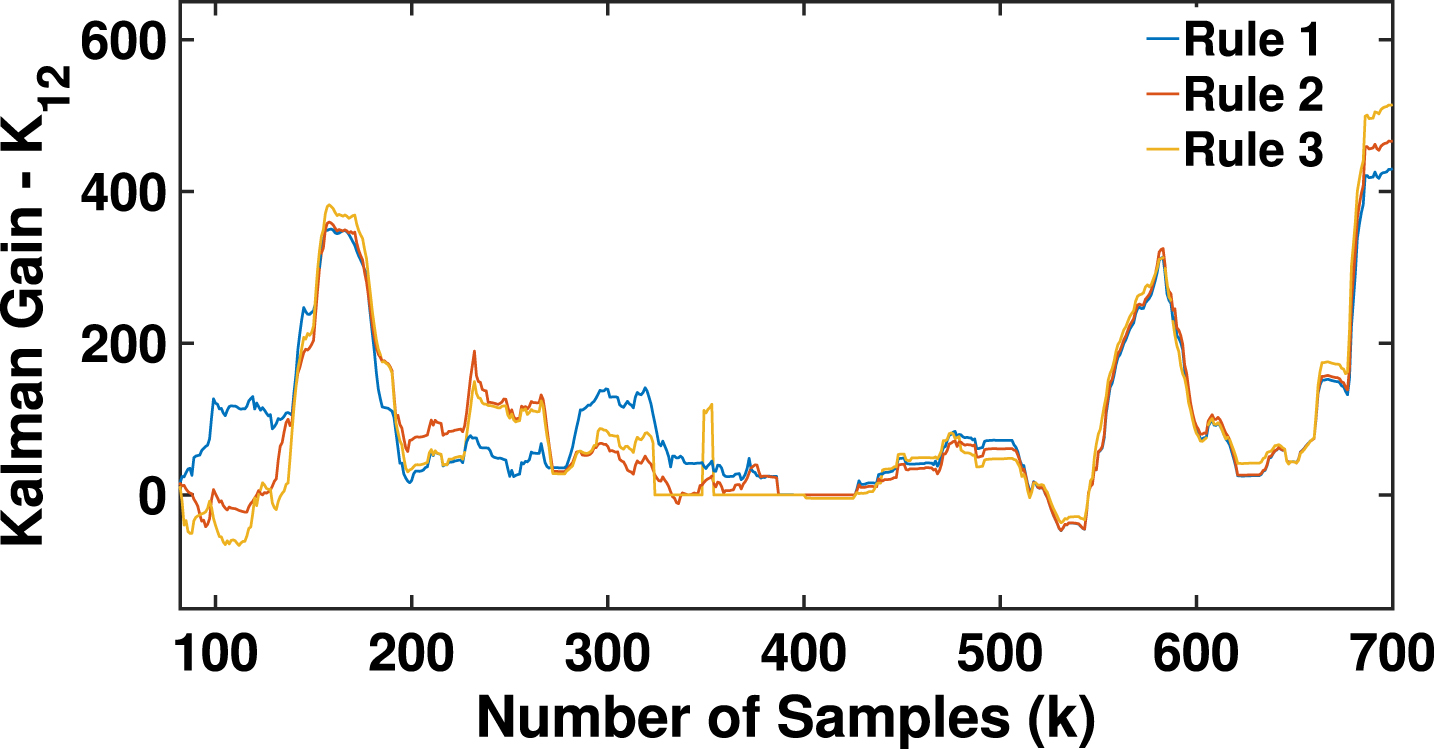
Element K12 of Kalman gain matrix.

Element K21 of Kalman gain matrix.
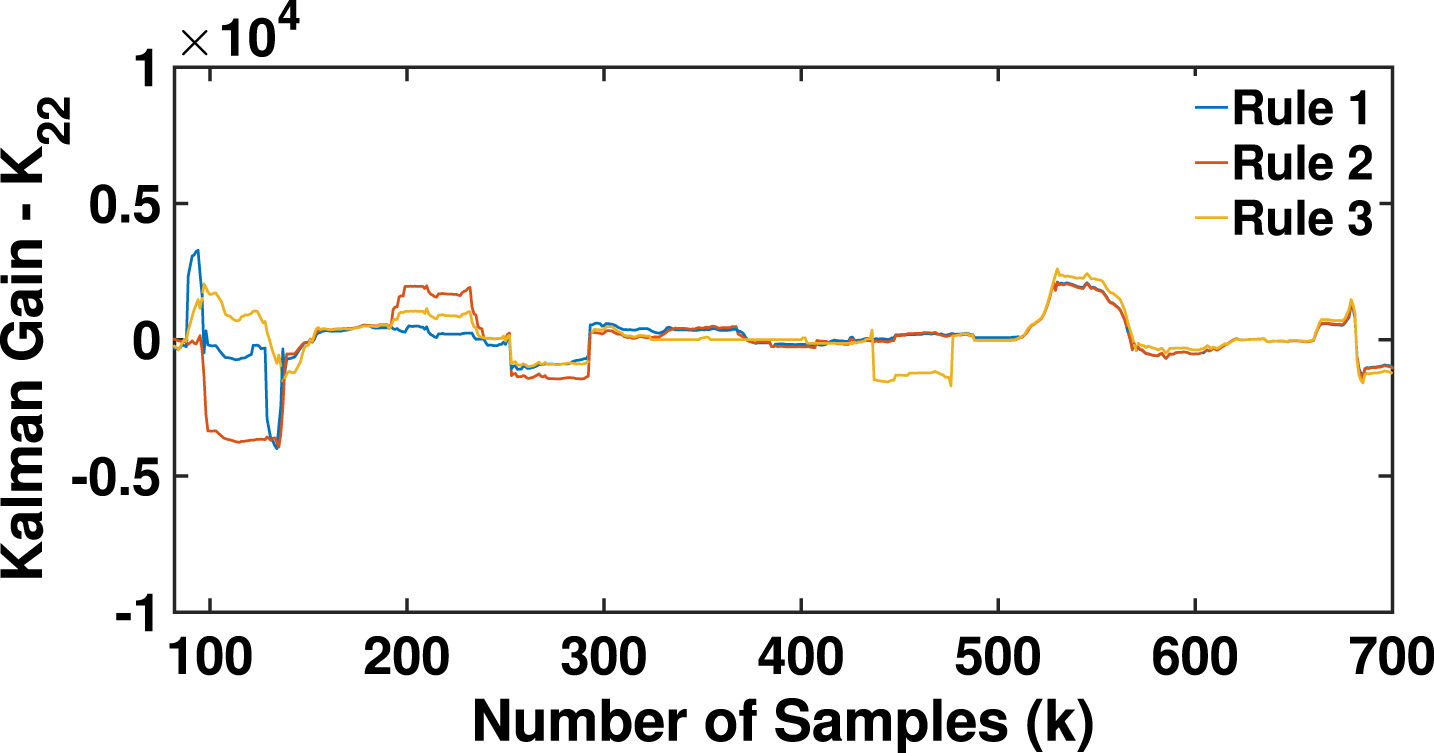
Element K22 of Kalman gain matrix.
Considering the computational and experimental results, the formulation of the proposed methodology is in accordance to the following remarks:
Adaptive fully data-driving, once the structure of the fuzzy Kalman filter is changed according to a new dynamic behavior from experimental data; Fast processing of data stream, once the experimental data are characterized by fast dynamic behavior; Robustness, once the fuzzy regions are updated according to the uncertain behavior within the experimental data.
Footnotes
Acknowledgment
This work was supported by FAPEMA and encouraged by Ph.D. Program in Electrical Engineering of Federal University of Maranhão (PPGEE/UFMA).