
Abstract
This paper develops the mathematical framework and the solution of a system of type-1 and type-2 fuzzy fractional and arbitrary order dynamical systems. The theory of arbitrary order differential equation is developed with fuzzy initial values, fuzzy boundary values and fuzzy parameters. There are numerous natural phenomena which can be modelled as arbitrary order dynamical systems whose initial conditions and/or parameters may be imprecise in nature. The imprecision of initial values and/or parameters are generally modelled by fuzzy sets. Here, the concept arbitrary order dynamical systems is developed with the introduction of fuzzy fractional derivatives, fuzzy fractional partial derivatives, fuzzy stochastic process, fuzzy stochastic random variable and fuzzy Brownian motion. The generalized L p -integrability, based on the extension of the class of differentiable and integrable fuzzy functions is applied and fuzzy arbitrary order differential equations are represented as fuzzy integral equations. A novel numerical scheme for simulations of numerical solution for fuzzy arbitrary order differential equations have also been developed. Some illustrative examples have been provided for different fuzzy type-1 and type-2 arbitrary order general dynamical systems models related to mathematical finance and problems in fluid flow.
Keywords
Introduction
The non-local property of the fractional differential and integral operators made them very useful in mathematical model in recent times. However in general the analytical solution of fractional differential equations are quite difficult; hence most research works focused on obtaining the numerical solutions of fractional differential and integral operators [1–4]. One of the most important usages of fractional differential equations is to analyse fractal sets, because fractals are irregular and nowhere differentiable functions. The properties local fractional integrals and derivatives are studied by [2] based on the local fractional calculus. The numerical methods for solving fractional order differential equations is developed by [5]. Smoothness of solution of caputo type fractional differential equation is studied in [6]; also Adams method to solve multi-term multi-order fractional order differential equations is developed by Diethelm in [7]. In [8] arbitrary real order differential equations are solved by matrix method which is based on discretization of the domain of given integro-differential operator as triangular strip matrix. In this approach the n-dimensional arbitrary integro-differential operator is discretised by Kronecker matrix product in an n-dimensional net of nodes [9]. Few research works are published in the recent time focusing numerical solution to fractional stochastic differential equations [10]. Runge kutta method for fractional stochastic differential equations was developed in [11].
In many real cases some parameters or functions in such modelling are found to be imprecise. The imprecision and uncertainty of knowledge are generally modelled by fuzzy functions. Zadeh initially introduced the idea of differentiability of fuzzy functions. It was further developed by using the extension principle and a few other concepts related to fuzzy derivative have been discussed by Puri [12]. The fuzzy initial value problem (FIVP) has been studied by Kaleva [13] and Seikkala [14]. A few alternative definitions of the differentiability of fuzzy functions are available amongst the Hukuhara differentiability [H-differentiability] and the strongly generalized differentiability [12, 15], became most acceptable and have attracted more attention than the other theories.
A more general concept to model imprecision and uncertainty is presented in [16], where type-2 fuzzy sets (T2FSs) is defined as a fuzzy set in which membership grades are Type-1 Fuzzy Sets (T1FSs). Moreover the parameters and state variables of different dynamic systems like environmental and biological systems are highly imprecise and could be modelled more appropriately by type 2 fuzzy variables and hence by type 2 fuzzy differential equations. The definition of derivative of type 2 fuzzy functions is first provided by Mazandarni with the notion of type-2 Hukuhara differentiability (H2-differentiability) [17] which is based on the distance measure between T2FSs known as Type-2 Hukuhara difference (H2-difference).
However, imprecision and chance are two fundamental manifestation of uncertainty in natural systems. The chance factor i.e. randomness of the uncertain system is often represented in terms of white noises or stochastic processes; and imprecision is modelled as fuzziness and both are found to appear simultaneously in real systems. In this context stochastic fuzzy differential equations, which incorporates randomness in terms of white noise and imprecision in terms of fuzzy variables is presented in [18]. Some extensive applications of fuzzy stochastic differential equations to model dynamics of population growth, stock price, short-term interest rate etc. are presented in papers [19, 20].
The paper [21] first used the local Lipschitz condition to obtain uniqueness and existence results for fuzzy stochastic dynamical system. Some theorem on local uniqueness are presented in [19, 22].
The idea of fuzzy Riemann-Liouville fractional differential equations were first presented in [23] base on the Hukuhara differentiability and facilitate solving uncertain fractional differential equations. The existence and uniqueness of solutions of Riemann-Liouville fuzzy fractional differential equations are studied in [24, 25]. In [26] Euler method was introduced to solve hybrid fuzzy differential equations. The explicit solutions of uncertain fractional differential equations under Riemann-Liouville H-differentiability is given in [27].
The organization of the paper is as follows. Section 2 contains the prerequisite theoretical backgrounds to understand the theory of general fuzzy arbitrary order differential equations. In Section 3 the main theoretical developments are described. Section 4 discusses the representation of fuzzy multi-term multi-order fractional order dynamics as fuzzy fractional order dynamical systems. In Section 5 the major contribution of the paper that is the development of a novel numerical schemes to solve type-1 and type-2 fuzzy arbitrary order differential equations, partial differential equations and stochastic differential equations are presented. In Section 6 different examples of type-1 and type-2 fuzzy arbitrary order dynamics are considered and its solution is obtained by the proposed method. The analysis of the numerical solution by the proposed method and major findings of the paper are presented in Section 7.
Mathematical prelims
In this section we introduce some basic concepts of type-1 and type-2 fuzzy sets, fuzzy calculus, elementary fractional calculus and stochastic calculus which are used in this paper to develop the theory of general fuzzy arbitrary order dynamics.
Type-1 fuzzy set (T1FS): Fuzzy sets and fuzzy calculus
Throughout the paper let us denote the universe of type-1 and type-2 fuzzy set valued functions by E1 and E2 respectively.
It is proved that (K n , h) is a complete and separable metric space [28].
The definition of type-1 fuzzy number was provide in the papers [12–14]. The T1FN
The limits are realised in the metric space (E1, d1) where d1 (u, v) = sup {d H (u α , v α ) , 0 ≤ α ≤ 1} and d H is the Hausdorff distance.
If
The fuzzy initial value problem and its α-cut representation is provided in [13, 29].
Type-2 fuzzy sets (T2FSs)
A type 2 fuzzy set (T2FS) is a fuzzy set so that degree of membership of its elements are also fuzzy. Let E2 denotes the set of all T2FS over R. The type-2 membership function of T2FS
The α-cut representation of a T2FS
The derivative of the type-2 fuzzy number-valued functions, is defined on the basis of corresponding metric space which is defined by Mazandarani [17]. The distance measure for T2FSs and type 2 metric space is defined as follows.
There are There are There are There are
Stochastic differential equation
Let I = [0, T] and a : I × R → R and b : I × R → R are two scalar functions. The standard form of a SDE could be written as follows:
Where W
t
is a Wiener process, which is characterized as a Gaussian process with W0 = 0 and W
t
∼ N (0, t) for each t > 0. A Wiener process is continuous throughout but not differentiable anywhere, therefore dW
t
isn’t defined. So Equation 2.3.1 is the symbolic representation of the following integral equation
It has been shown that a Wiener process satisfies the following properties: E (W t ) = 0, E ((W t ) 2) = t2, and E ((W t 4 - W t 3 ) (W t 2 - W t 1 )) = 0 for all 0 ≤ t1 ≤ t2 ≤ t3 ≤ t4.
The second integral in Equation (2.3.2) containing the Wiener process) is not measurable in Riemann-Stieltjes sense, is called stochastic integral. For a class of suitable random functions h : [0, T] → R and partitions 0 = t0 < t1 < t2 …… … < t
n
= T with maximum spacing Δ; the Ito integral is defined as
Let Y
t
= U (t, X
t
) where U : [t0, T] → R × R has continuous second order partial derivatives and X
t
satisfies Ito stochastic Equation (2.3.1), then Y
t
is a solution of
Where
An alternative definition of stochastic integrals is defined by Stratonovich where the evolution of integration is carried out at the midpoint of each partitioned subinterval. The Stratonovich stochastic integral is defined as
A Stratonovich SDE with scalar coefficients a and b is known as Stratonovich stochastic integral equation and symbolically written as
Let U : [t0, T] → R × R has continuous second order partial derivatives, then
It could be shown that the Ito SDE
dX t = a (t, X t ) dt + b (t, X t ) dW t has the same solution with Stratonovich SDE
In order to define arbitrary order derivative the integral operator J which is defined as the fractional integral for a function f (x) is defined by Riemann and Liouville as follows.
Let us assume that f is integrable and ∫f (t) dt = F (t) then it could be shown that
So
Therefore the n-th order derivative of a function could be represented as an integro-differential operator
Another version of definition of arbitrary order derivative was introduced by M. Caputo in his paper [32] as follows.
Fractional partial derivatives
For more general case where f is a function of several variables the arbitrary order partial derivatives are similarly defined as the integrals over any particular variable. Let f : R
n
→ R
n
then the partial derivative of f with respect to x
i
in Riemann Liouville sense is defined as
Here the integral is taken over x i for each fixed values of other x r s, where r = 1, 2, …, n, i ≠ r.
Similarly the partial derivative of f with respect to x
i
in Caputo sense is defined as
Fuzzy fractional derivatives and fuzzy fractional differential and integral equation
Fuzzy fractional derivatives
In order to define type-1 and type-2 fuzzy arbitrary order calculus and type-1 and type-2 fuzzy arbitrary order integro-differential operator first the type-1 and type-2 fuzzy arbitrary order derivatives should be defined.
Similarly fuzzy fractional order partial derivatives could be defined as follows.
where n = [β] + 1.
where n = [β] + 1.
In this paper, Caputo derivatives are used to express different arbitrary order dynamical systems as only integer order initial condition f n (t0) is necessary to solve these type of equation.
Type-1 fuzzy stochastic process and type-1 fuzzy stochastic integral
It has been shown that f : Ω → K n is a set-valued random variable if, and only if, f is a A|B d H measurable mapping, where B d H denotes the Borel σ-algebra generated by the topology induced by the metric d H in K n .
Let us consider the following metric
A fuzzy random variable
A fuzzy stochastic process
Let p ≥ 1, and N ={ A ∈ B [0, 1] × A
t
: A
t
∈ A
t
for every t ∈ [0, 1] } , A
t
= { ω : (t, ω) ∈ A } for t ∈ [0, T] and h ∈ L
p
(I × Ω, N, R
n
) : I × Ω → R
n
represents a nonanticipating stochastic processes such that
Type-2 fuzzy stochastic process and type-2 fuzzy stochastic integral
Where ρ denotes the set of strictly increasing continuous functions ρ : [0, 1] → [0, 1] such that ρ (0) = 0, ρ (1) = 1, and B
d
2
is the sigma-algebra generated by the topology induced by the metric. It could be proved that the type-2 fuzzy mapping:
A fuzzy random variable
Fuzzy stochastic differential equation
Thus the symbolic representation of fuzzy stochastic differential equation is as follows:
Where t ∈ I = [0, T] and
B = (B1, B2, …… … , B
m
) is defined as the m-dimensional Brownian motion where
Also
The integral involves fuzzy function is thus a fuzzy stochastic Lebesgue integral, while the integral involves fuzzy Brownian motion is the ensemble of the sum of R
n
-valued stochastic Ito integrals where the embedding
In the paper [22] the sufficient conditions for the existence and uniqueness of the solution to (3.4.1) are derived.
The sufficient condition for having strong solution to (3.4.1) has been studied in [22, 24].
Thus the symbolic representation of type-2 fuzzy stochastic differential equation is as follows:
Where t ∈ I = [0, T] and
Also
This definition of type-2 fuzzy stochastic differential equations generalize the fuzzy stochastic differential equations and represented as type-2 fuzzy stochastic integral equations.
Type-1 fuzzy arbitrary order initial value problem
The fuzzy initial value problem with arbitrary order β could be written as
Hence the solution could be written as
Type-2 fuzzy arbitrary order initial value problem
The fuzzy initial value problem with arbitrary order β could be written as
Hence the solution could be written as
Type-1 fuzzy arbitrary order boundary value problem
Let
i.e.
Type-2 fuzzy arbitrary order boundary value problem
Let
In general we denote a fuzzy number valued function (both type-1 and type-2 together) by
The integral may be the type-1 or type-2 fuzzy integral according to the nature of the variable
Numerical solution to fuzzy fractional differential and integral equation
Consider a system of fuzzy arbitrary order dynamical systems in the vector form where state variables and parameters are fuzzy numbers. Let n and k be the dimension of the system and the number of fuzzy parameters. If X = (x1, x2, …, x
i
, …, x
n
) and
with
Where
Now for each
The evolution of surface of uncertainty is carried out by taking the values of the functions and parameters as any arbitrary footprint of uncertainty of the fuzzy variables i.e.
Would be a solution of the above fuzzy arbitrary order dynamical systems with
Numerical examples
In this section we have considered few real world examples of ordinary dynamical systems (6.1), partial dynamical systems (6.2) and stochastic dynamical systems (6.3). The corresponding dynamics are extended into type-1 and type-2 fuzzy dynamics by introducing imprecision in different functions and parameters and analysed in this section.
Fuzzy Fractional ordinary differential equation: Fuzzy fractional brusselator system
The reaction brusselator system studies the mechanism of an autocatalytic, oscillating chemical reaction. In an autocatalytic reaction some derivative species is created in the reaction which acts to increase the rate of the reaction. The fuzzy reaction brusselator dynamics with arbitrary order β could be written as
Where
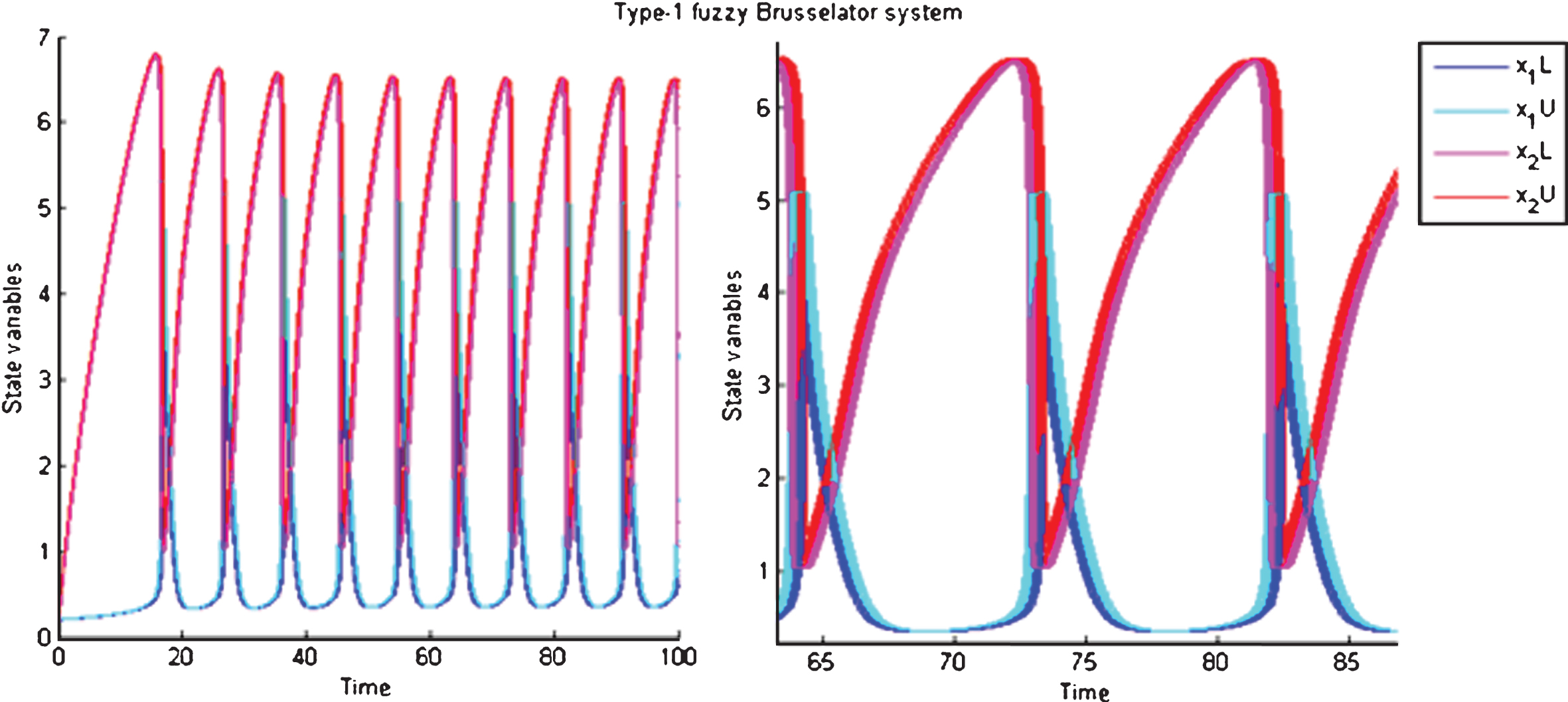
Type-1 Brusselator system.
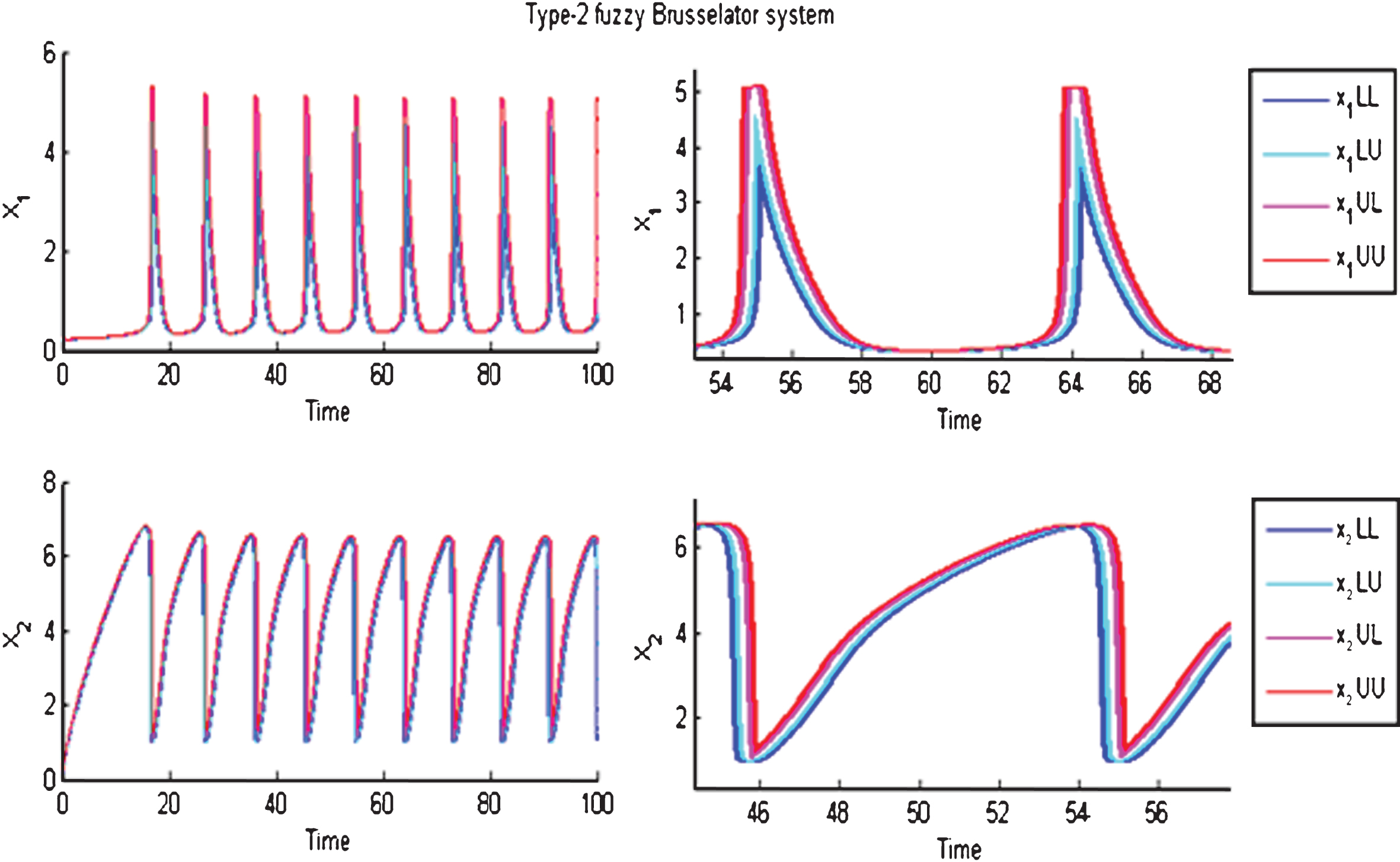
Type-2 Brusselator system.
The advection–diffusion equation represents the combination of the diffusion and advection process which describes different physical phenomena where particles, energy, or other physical quantities are transferred inside a physical system due to diffusion and convection. Where u is the state variable; d is called the diffusivity or diffusion coefficient,
The type-1 and type-2 fuzzy arbitrary order advection diffusion equation is solved by the proposed method for β = 0.8, γ = 0.75, δ = 0.75 and the solution is represented in Figs. (3–5).

Surface plot for fuzzy fractional ADE at α= 1.

Type-1 fuzzy fractional ADE upper and lower bounds for concentration at different α-cuts.
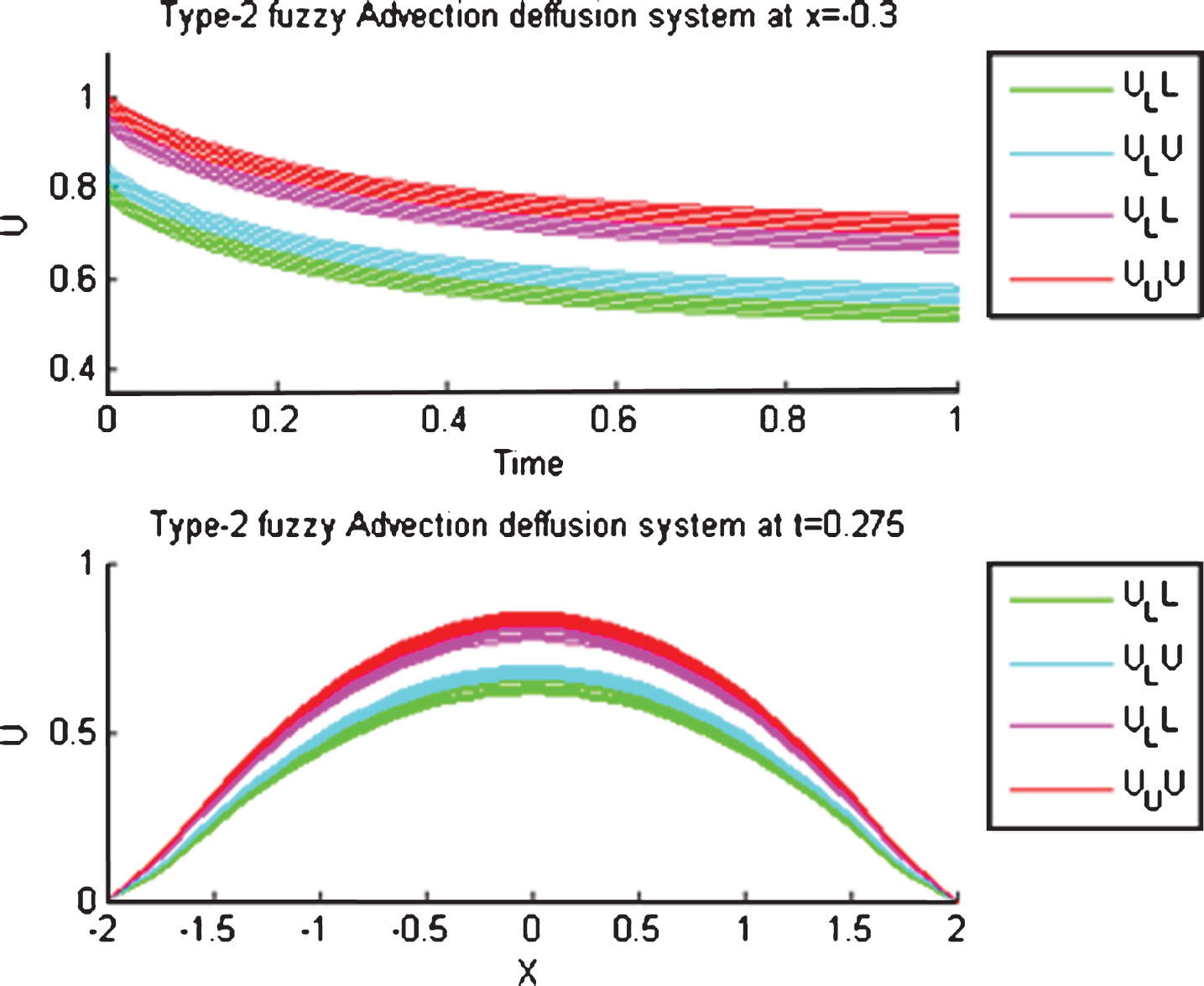
Type-2 fuzzy fractional ADE upper and lower bound for concentration at different α-cuts.
Fuzzy Fractional asset price model
The fractional asset price model with arbitrary order h could be written as
Here
Also as a separate case we extend the fuzzy stochastic differential equation into type-2 fuzzy stochastic equation by extending the parameter
The type-1 and type-2 fuzzy Euler model is solved by the proposed method for h = 0.6 and the solution is represented in Figs. (6 and 7).
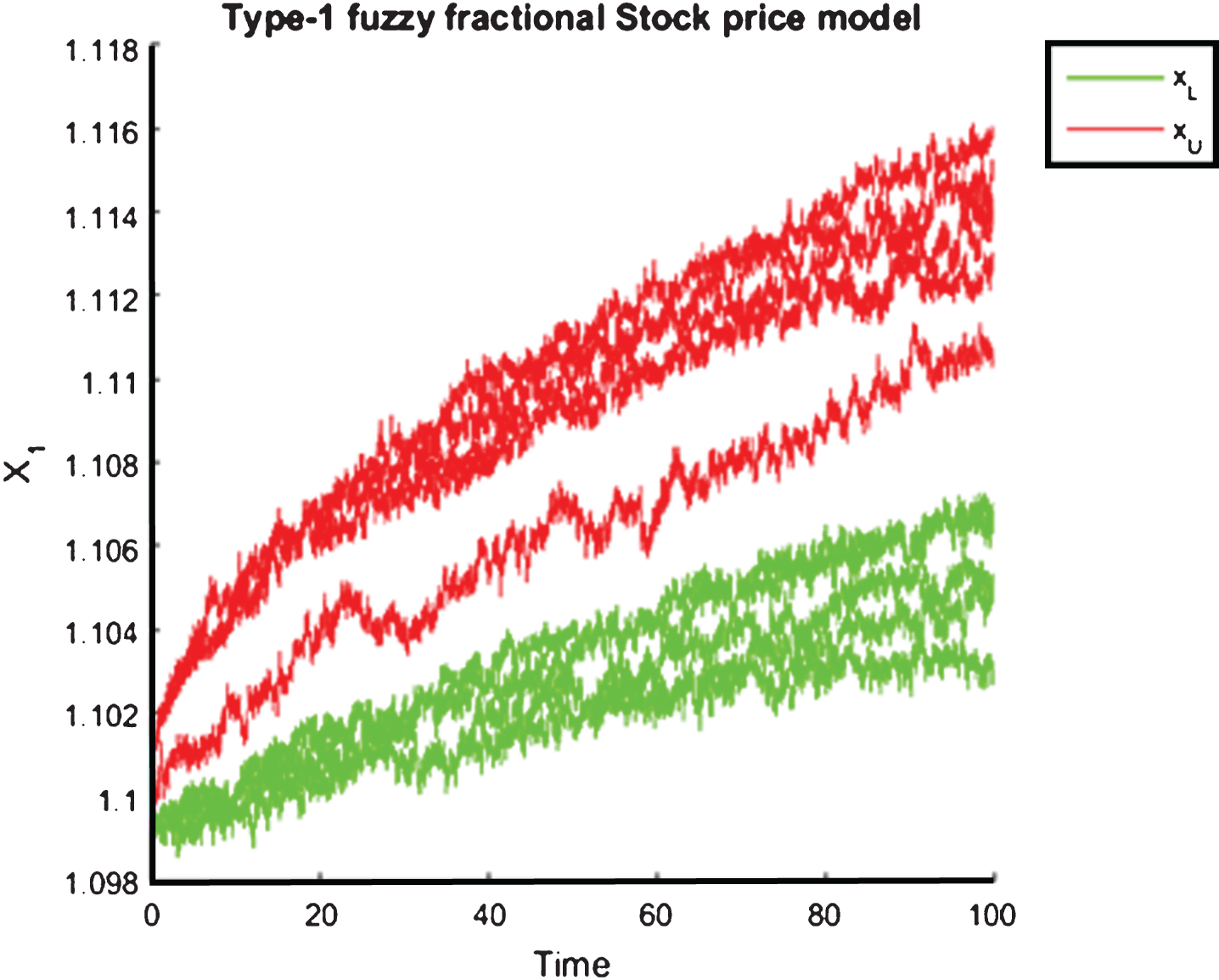
Type-1 fuzzy fractional stock price model.
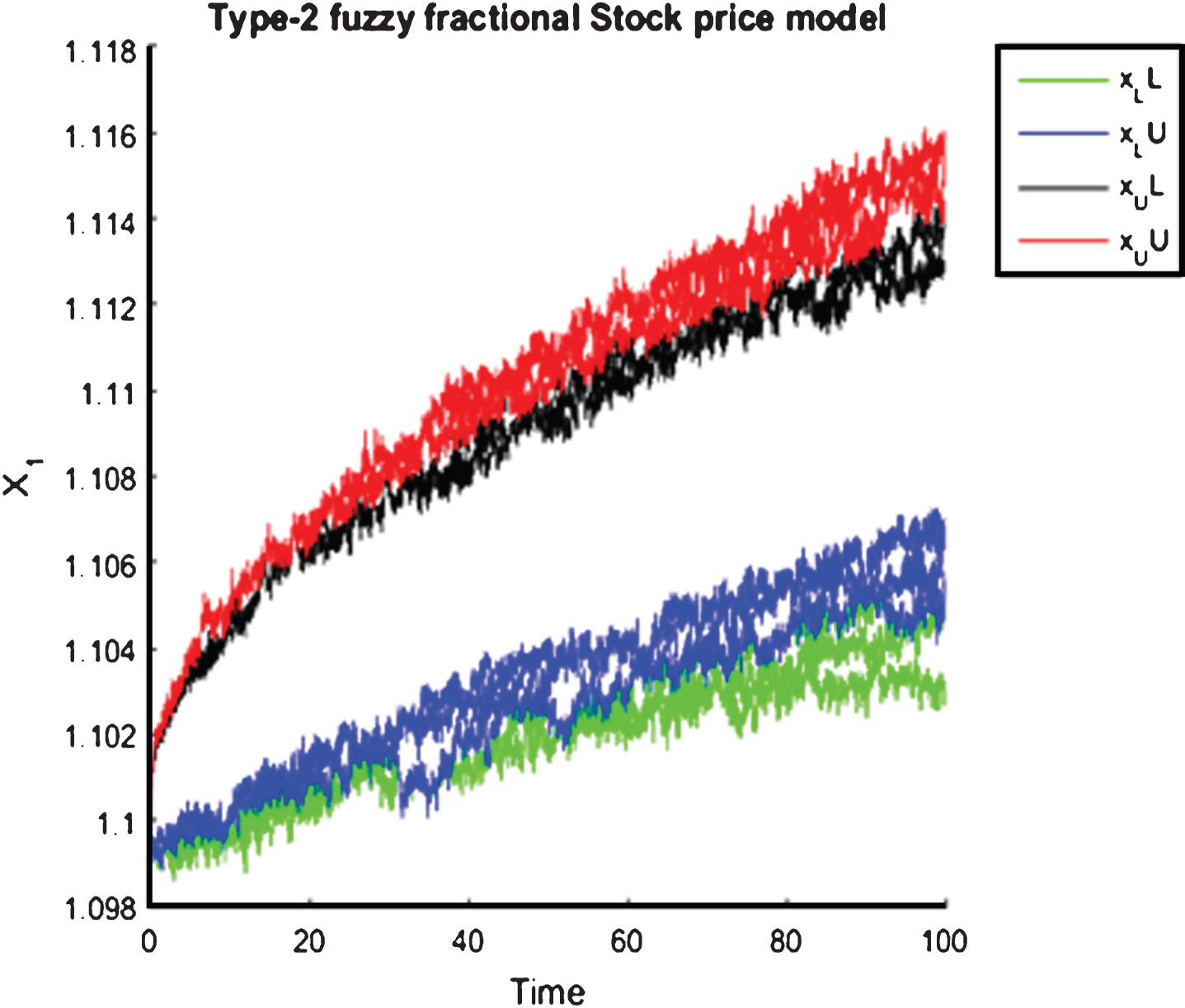
Type-2 fuzzy fractional stock price model.
The arbitrary h th order European option model could be written as
Here the first equation is same as the asset price model and
The type-1 and type-2 fuzzy European option price model is solved by the proposed method for h = 0.6 and the solution is represented in Figs. (8 and 9).
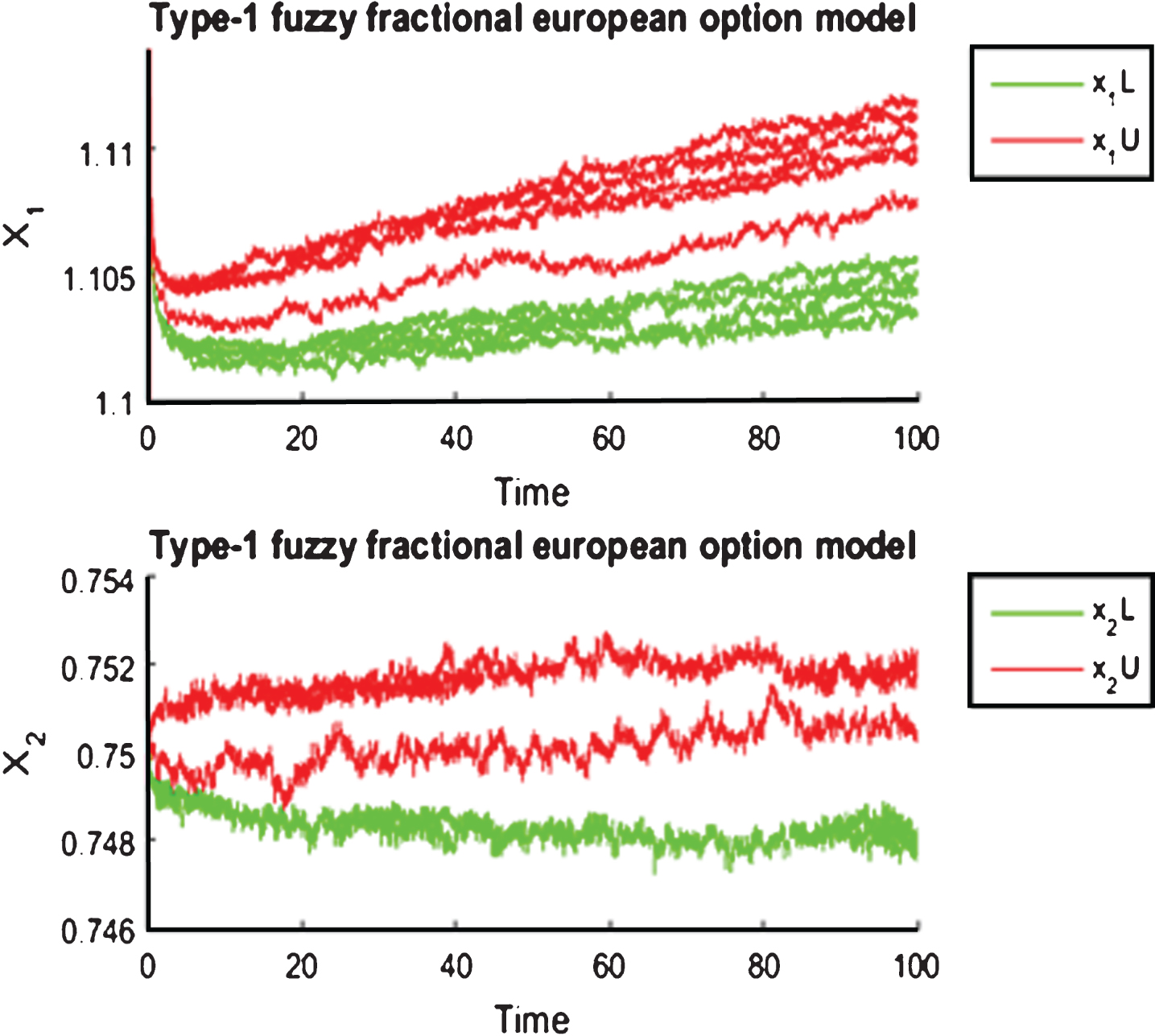
Type-1 fuzzy fractional European option model.

Type-2 fuzzy fractional European option model.
The numerical simulations of different class of fuzzy arbitrary order dynamical systems are carried out to obtain the solution of corresponding fuzzy integro-differential equations. The solution of fuzzy type-1 and type-2 ordinary dynamical systems, partial dynamical systems and stochastic dynamical systems are represented graphically in the above sections. The solution of fuzzy type-1 and type-2 fractional reaction brusselator system is shown in Figs. (1 and 2) respectively. The solution of fuzzy type-1 and type-2 fractional advection diffusion equation is shown in Figs. (3–5) respectively. In Figs. (6 and 7) solution of fuzzy type-1 and type-2 fractional asset price model is represented whereas the solution of fuzzy type-1 and type-2 fractional European option model is represented in Figs. (8 and 9). Here for the simulation purpose and for the sake of simplicity we consider the initial conditions and parameter values as type-1 and type-2 triangular fuzzy numbers. In the above figures
It is noted that at α= 1 the solution for all preceding fuzzy type-2 arbitrary order dynamical systems converges with their respective type-1 fuzzy solution, whereas fuzzy type-1 arbitrary order dynamical systems converges to the solution of the corresponding crisp arbitrary order dynamical systems models.
The proposed method illustrate the impact of the imprecision and uncertainty on the solution for uncertain initial condition and/or boundary conditions and/or parameter values. Moreover, at the absolute precision level or grade of membership is at α= 1 the solution coincide with the ordinary dynamical system. In this sense the solution obtained by solving fuzzy type-2 arbitrary order dynamical systems is the generalization of corresponding system of fuzzy type-1 arbitrary order dynamical systems. The solution of a fuzzy type-1 and fuzzy type-2 arbitrary order dynamical systems are obtained by solving the corresponding embedded system i.e. to solve crisp system with all possible values of the parameters and functions within the uncertainty region. It is already noted that the direct use of interval algebra and interval calculus to solve fuzzy dynamics generally produces unacceptable and incorrect results. Whereas the method proposed in this paper, which is based on fuzzy differential inclusion provides an acceptable solution of general fuzzy arbitrary order dynamical systems.
Conclusions
Fuzziness is one of the best alternative to model imprecision and uncertainty in the dynamics. Moreover, if the membership of some uncertain function or parameter are also imprecise, T2FSs are one of the best alternative to model the dynamics. The main objective of this paper is to define the type-1 and type-2 fuzzy arbitrary order dynamical systems and develop a methodology to obtain numerical solution of type-1 as well as type-2 fuzzy arbitrary order dynamical systems. The representation of general fuzzy arbitrary order dynamical systems are based on integrability of the general fuzzy number-valued functions and fuzzy random variables.
General fuzzy arbitrary order dynamical systems are the generalization of ordinary arbitrary order dynamical systems. However for general fuzzy arbitrary order SDE the stochastic processes is extended to E1 and E2 the universe of fuzzy set valued functions. Consequently, type-2 fuzzy arbitrary order dynamical systems reduces to system of type-1 fuzzy arbitrary order dynamical systems, which again reduces to system of ordinary arbitrary order embedded systems.
In this paper, we have presented the definition of fuzzy type-1 and type-2 fuzzy arbitrary order dynamical systems and proposed a methodology to solve system any fuzzy type-1 and type-2 fuzzy arbitrary order dynamical systems. A number of numerical examples is solved and the result is shown and analysed. In future studies, we may investigate the effect of fuzzy order of an arbitrary order dynamical systems.