
Abstract
In this article, a technique to construct a new type of topological structures by graphs called topological graphs is introduced. We use the concept of a homeomorphism between topological graphs as a topological property to prove the isomorphic between graphs. We construct a computer program that builds graphs and its topological graphs. This model helps in studying many topological properties such as continuity, connectedness, compactness and separation axioms on graphs. Finally, we present some examples of different types of graphs and their topological graphs and study some of their topological and algebraic properties.
Introduction and Preliminaries
The Nobel prize 2016 in physics was gifted to three scientists in phase transitions and topological phases of matter, this event has directed the attention to the need of more knowledge about the topology. Topology is a branch of mathematics whose concepts exist not only in almost all branches of mathematics, but also in many real life applications and concerned with all questions directly or indirectly related to continuity. Many topologists suggested topological models in biology [6–8] and in medicine [12, 17].
Topology is a branch of geometry called rubber sheet geometry. It is the science that deals with the properties of things that does not depend on a dimension, which means that it allows increases and decreases, but without cutting things. If X is a nonempty set, a collection τ of subsets of X is said to be a topology on X if the following condition holds X and φ belongs to τ, the finite intersection of any two sets in τ belongs to τ and the union of any number of sets in τ belongs to τ [16].
Graph theory [2, 18] has recently emerged as a subject in its own right as well as being an important mathematical tool in diverse subjects as operational research, chemistry, sociology and genetics. A graph G = (V, E), is an ordered pair of disjoint sets (V, E), where V is a nonempty set and E is a subset of unordered pairs of V. The vertices and edges of a graph G are the elements V = V (G) and E = E (G), respectively. A graph G is finite (resp. infinite) if the set V (G) is finite (resp. infinite). The degree of a vertex u ∈ V (G) is the number of edges containing u. If there is no edge in a graph G contains a vertex u, then u is called an isolated point, and so the degree of u is zero. An edge which has the same vertex to ends is called a loop, and the edge with distinct end is called a link. A graph is simple if it has no loop and no pair of its links join the same pair of vertices. A graph which has no edge is called a null graph. A simple graph is called complete graph, if any two distinct vertices are joined by an edge. If the vertex set of a graph G can be split into two disjoint sets A and B, so that each edge of a graph G joins a vertex of A and a vertex of B, then a graph G is a bipartite graph. A complete bipartite graph is a bipartite graph in which each vertex in A has been joined to each vertex in B by just one edge. Given a graph G, a walk in G is a finite sequence of edges of the form v0v1, v1v2, ⋯ , vn-1v n . We call v0 the initial vertex and v n the final vertex of the walk. A walk in which all the edges are distinct is a trial. If, in addition, the vertices v0, v1, v2, ⋯ , v n are distinct (except, possibly,(v0 = v n ), then the trial is a path. A path or trial is closed if v0 = v n ) and a closed path containing at least one edge is a cycle. We can combine two graphs to make a larger graph. If the two graphs are G1 = (V (G1) , E (G1)) and G2 = (V (G2) , E (G2)), where V (G1) and V (G2), are disjoint, then their union G1 ∪ G2 is the graph with the vertex set V (G1) ∪ V (G2) and edge family E (G1) ∪ E (G2). A graph that is in one piece, so that any two vertices are connected by a path is a connected graph, and disconnected otherwise. Clearly, any disconnected graph G can be expressed as the union of connected graphs, each of which is a component of G. In many applications, it is necessary to associate with each edge of a graph an orientation or direction. In some situations, the orientation of the edges is a "true" orientation in the sense that the system represented by the graph exhibits some unilateral property. For example, the direction of the nonway streets of a city and the orientations representing the unilateral property of a communication network are true orientation of the physical system. In other situations, the orientations used a "pseudo"-orientation used in lieu of an elaborate reference system. For example, in electrical network theory the edges of a graph are assigned arbitrary orientations to represent the references of the branch currents and voltages. The study of directed graphs arises from making the roads into one way streets. The connection between graph theory and different subjects such as, in the medicine [15], and in physics [11]. The two sets representing two vertices the graph connected by r edges will intersect in exactly r elements. If v i and v j are vertices of a graph G, and A and B are the sets representing v i and v j respectively, we denote by N (v i , v j ) the cardinal number of the set A ∩ B. The aim of the present paper is devoted to establish some new types of graphs in terms of its topological graphs or topological structures. We investigate some methods to generate topological graph from a given a graph and vice versa, not in general. We introduce a new method to prove an isomorphic between graphs through the homeomorphism between its topological graphs. In other words, we study the isomorphic between graphs in the view point of topology. We present some examples of topological graphs for different types of graphs and vice versa. Some topological and algebraic properties will be studied for graphs and topological graphs. We construct an algorithm to calculate the number of edges of graphs through its topological structures. We apply Theorem 3.3 on some special types of graphs and different examples. The adjacency matrix is used to establish our given algorithm for graphs and its topology. It is also used to investigate the degree of each vertex of graphs. In this case, the topological structures of graphs will help to study some properties of graphs such as continuity, connectedness and separation axioms via its topological graphs. The model of topological structures helps also to apply graphs in biology, medicine and many real life problems.
(i) u is invertex of v if
(ii) u is outvertex of v if
(iii) The indegree of a vertex v is the number of vertices u such that
(iv) The outdegree of a vertex v is the number of vertices u such that
The graphic of a class of sets
In the following, every class of sets can be represented to a general graph. Any graph G with only one edge can be represented by a class {A, B} such that A ∩ B is a singleton |A ∩ B|=1. If G contains r-edges, then |E (G) | = |A ∩ B| = r, where |A| refers to the cardinality of a set A. So, every graph can be illustrated by different classes as shown in Example 2.3.
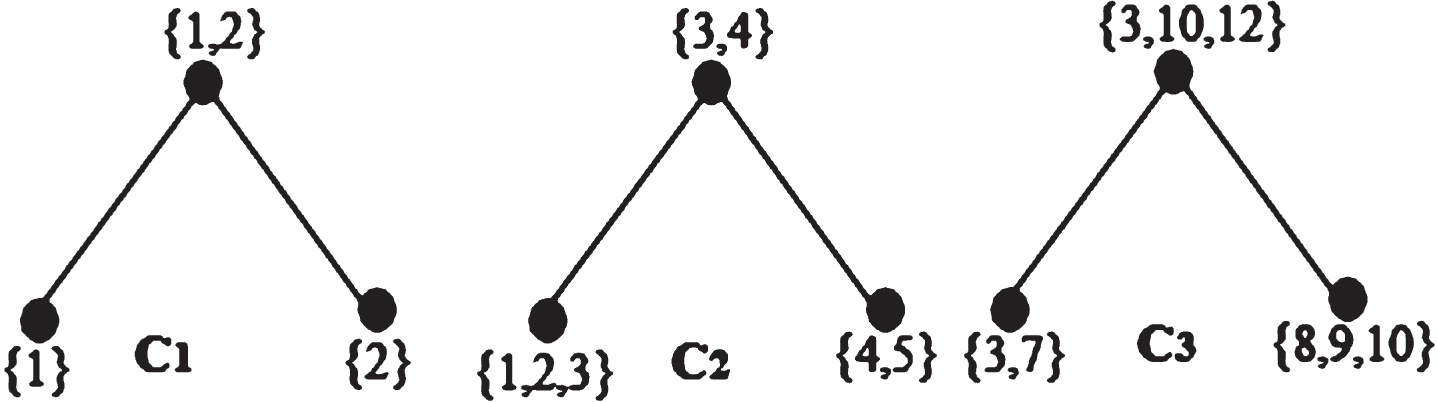
Three classes with only one graph.
In the following, we show that every graph G can be illustrated with a class of sets.
The converse of Theorem 2.8 may not be true, in general, because every graph can be represented by many classes and may not be parallel. In this case, we use the natural numbers N to represent the class of graphs as shown in Example 2.9.
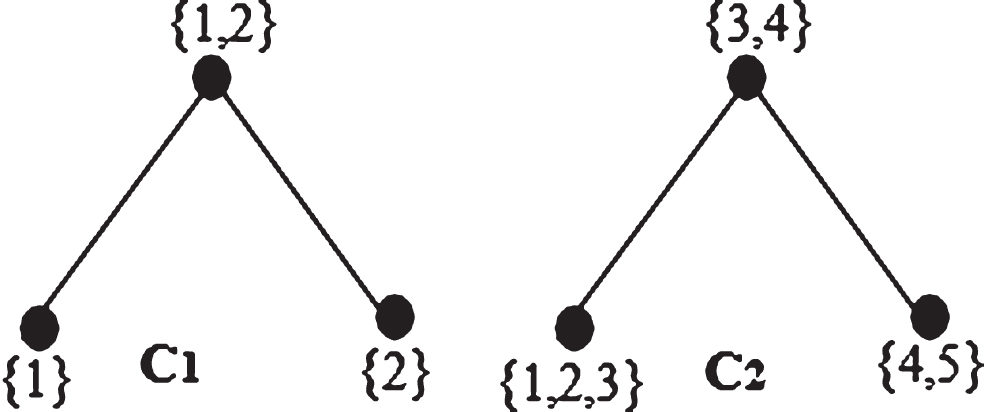
Two isomorphic graphs.
In the following, we describe a new class from any simple graph G.
Now, we explain that the class of sets in Definition 2.10 and Definition 2.11 represents a graph.
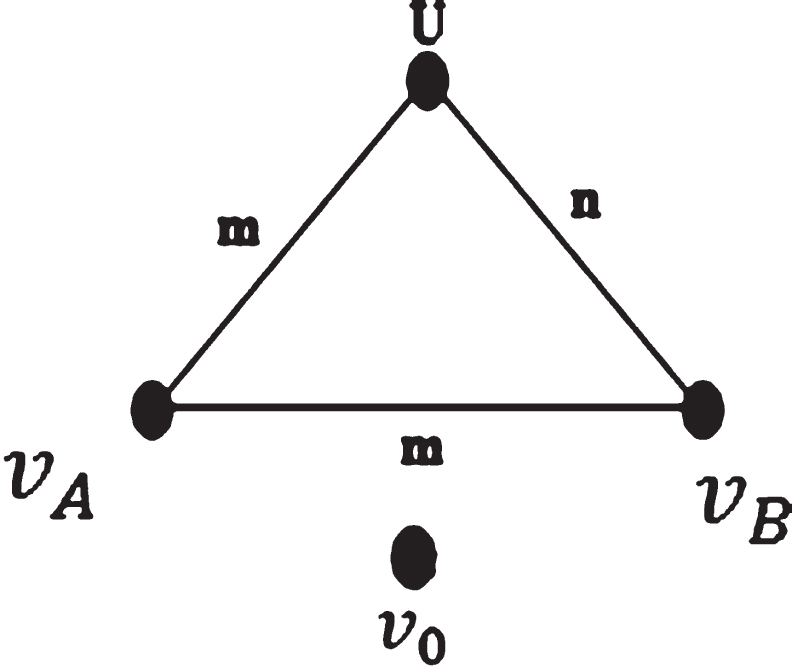
Let A and B are two nonempty sets and |A| = m, |B| = n. The graphs represented by a class {A, B, A ∩ B, A ∪ B} will be given as in the following cases:

Disjoint graph sets.
Inclusion graph sets.
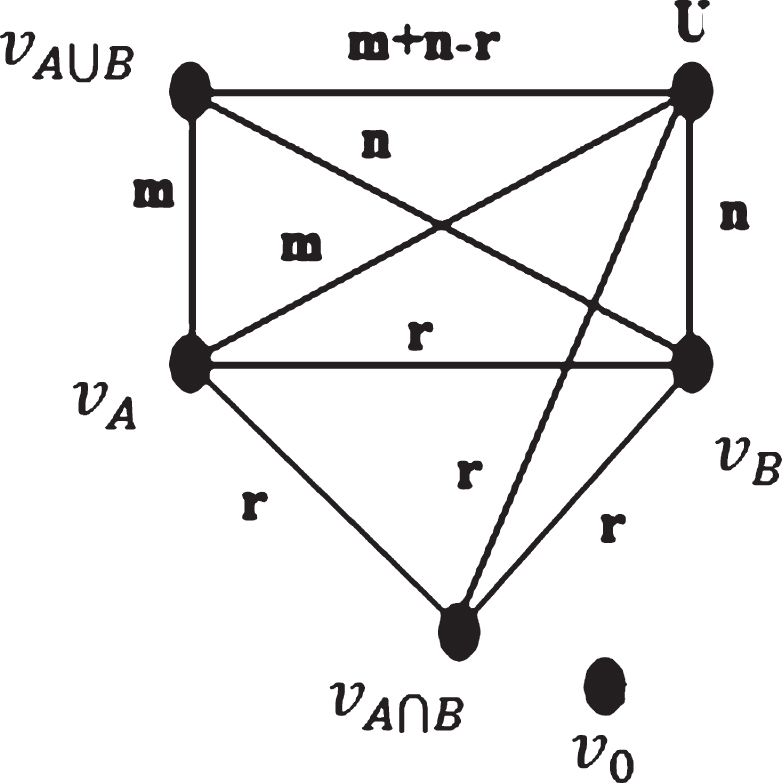
Intersection graph sets.
In this section, we use a set graph to generate a topological space, we say also, a topological graph or a topological structure. The set graph will be represented by P (N). Some algebraic operations such as, a union, an intersection and a subset, between vertices are defined by: v
A
1
∪ v
A
2
∪ v
A
3
∪ . . . = vA1∪A2∪A3∪.... v
A
∩ v
B
= vA∩B. v
A
⊆ v
B
if and only if A ⊆ B.
The number of edges |E
p
(G) | of a pseudograph G of the set X = {1, 2, ⋯ , n} equals n2n-2 (2n-1 - 1) + n2n-1.
The number of edges |E
d
(G) | of a discrete graph arising from a pseudograph i.e, by deleting loops in P equals n2n-2 (2n-1 - 1).
The number of edges |E
s
(G) | of a simple graph arising from the discrete graph i.e, by drawing only one edge joint two adjacent vertices in D equals
Let A ⊆ X, |A| = m and |A
c
| = n - m deg (V
A
)=∑R (V
A
, V
B
)+∑R (V
A
, V
E
) + ∑R (V
A
, V
L
)+∑R (V
A
, V
K
)=∑|A ∩ B|+∑|A ∩ E| +∑| (A ∩ L|+∑|A ∩ K| =∑|B|+∑|A|+∑|A ∩ L|. deg (V
A
) = m (2n-1 - 1). It follows that the number of edges of discrete graphs equals |E
d
(G) | = deg (V
A
) =2
n
- 2n-m - 1. It follows that the number of edges of simple graphs G equals |E
s
(G) | =
□
We apply Theorem 3.3 in Example 3.4.
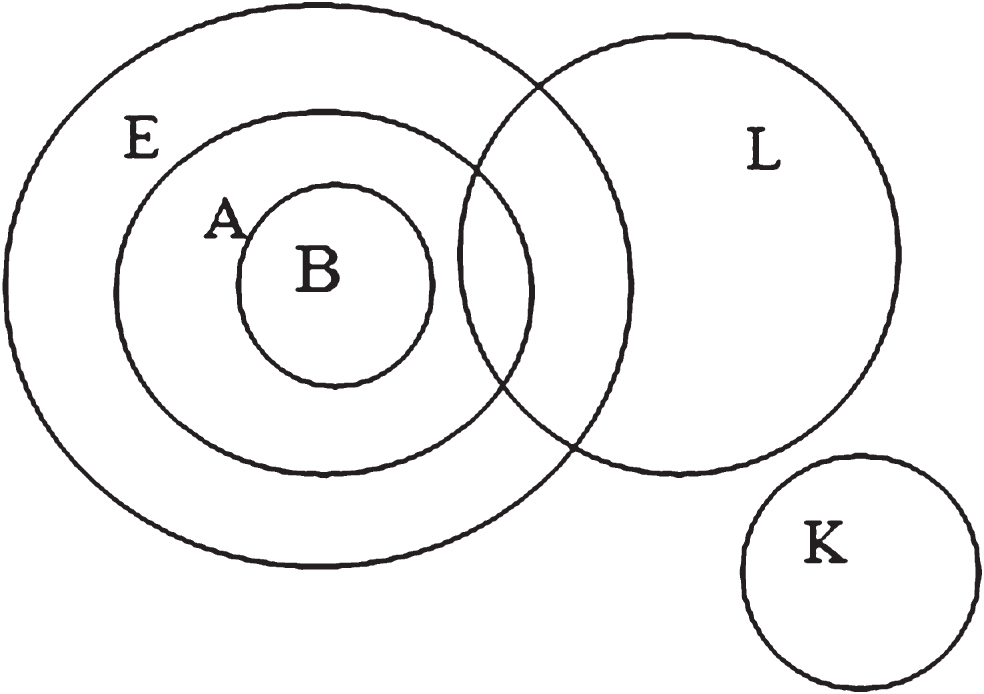
Relationship Between Sets.
|E
P
(G) |=3 * 23-2 (23-1 - 1) +3 * 23-1 =3 * 2 *3 + 16=18 + 12=30. |E
D
(G) |=3 * 23-2 (23-1 - 1)=3 * 2 *3=18. |E
S
(G) |=
G contains only one isolated vertex v0. G contains a vertex v adjacent with each vertex in G ∖ {v0} and N (v
i
, v) ≤ N (v
i
, U) ≤ N (v, U), for every v
i
∈ G ∖ {v0}. For every two distinct vertices v
i
,v
j
∈ V (G), then v
i
∪ v
j
∈ V (G) and v
i
∩ v
j
∈ V (G). Then the class τ of vertices is a topological graph.
By Definition 2.4, G can be represented by different classes. Suppose that the graph number of G is m. Then there exists a class, say τ, such that τ ⊆ P ({1, 2, 3, ⋯ , m}) =2{1,2,3,⋯,m} and represents G. Each A
i
∈ τ represents v
i
and X ∈ τ represents the set of vertices V (G). So, by Definition 2.6, N (v
i
, V (G)) = N (v
i
, U). If N = {1, 2, 3, . . . , m}, then |A ∩ X| = |A ∩ N| = |A|. This means that each A ∈ τ satisfies that A ⊆ X. Since every vertex in G is a graph subset of V (G), i.e, for every v
i
∈ V (G) the singleton {v
i
} ⊆ V (G) and each element in τ is a subset from X ∈ τ, then X = {1, 2, . . . , m}. Also, the isolated vertex v0 can be represented by φ ∈ τ. Let v1, v2, ⋯ be an arbitrary different vertices in V (G) represented by A
v
1
, A
v
2
, ⋯. Since v1∪ v2 ∪ ⋯= v(A
v
1
∪ A
v
2
∪ ⋯), then A
v
1
∪ A
v
2
∪ ⋯ ∈ τ. If v
i
and v
j
are two different vertices in V (G) and represented by A
i
and A
j
, respectively. Since v
i
∩ v
j
=vA
i
∩A
j
, then A
i
∩ A
j
∈ τ. Therefore τ is a topology.□
Now, we use the topological graph τ to calculate the number of edges in G using Theorem 3.6.
={1, 2, 3, ⋯ , m}, 1 < m < n, degV A m
=m (n - m)+
= m (n - m)+
=mn - m2+
=
The number of edges is
|Edges|=
=
=
=
=
□
To explain the results of Theorems 3.5, 3.6, we present Examples 3.7, 3.8.
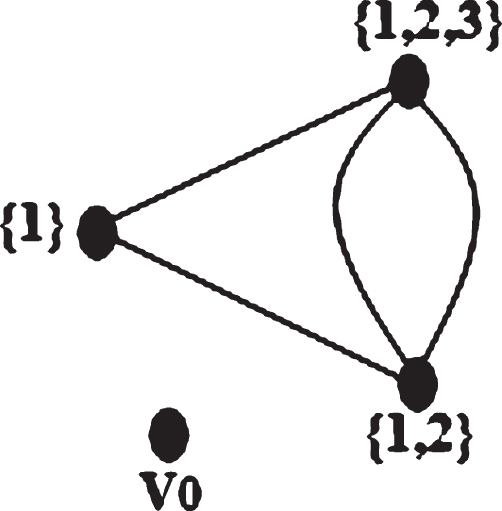
A topological graph for 3 points.
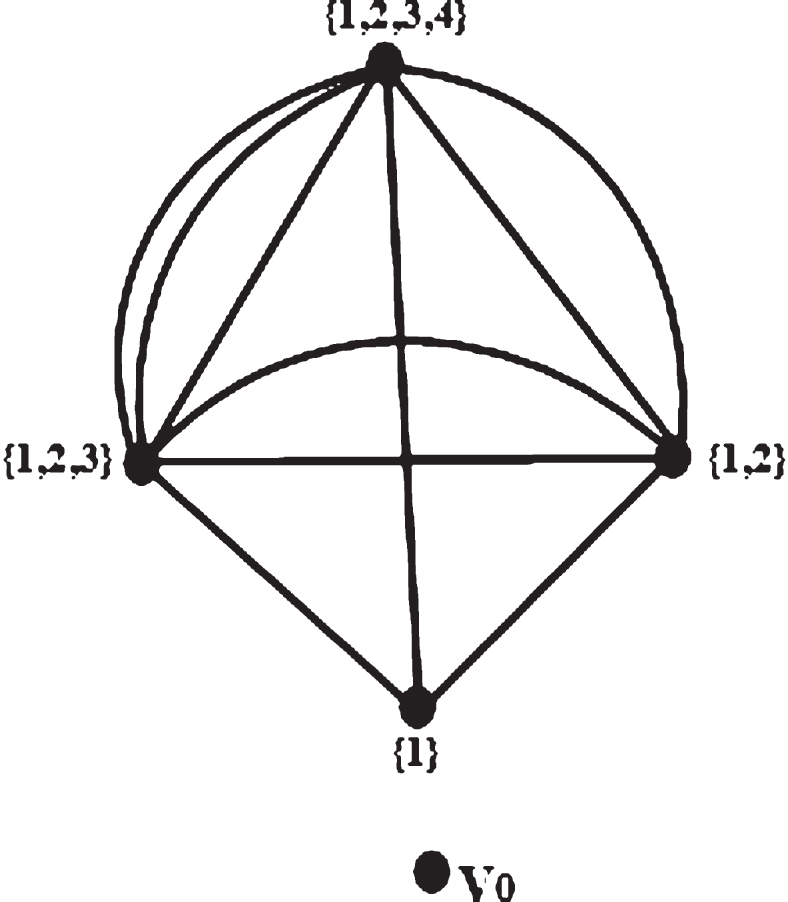
A topological graph for 4 points.
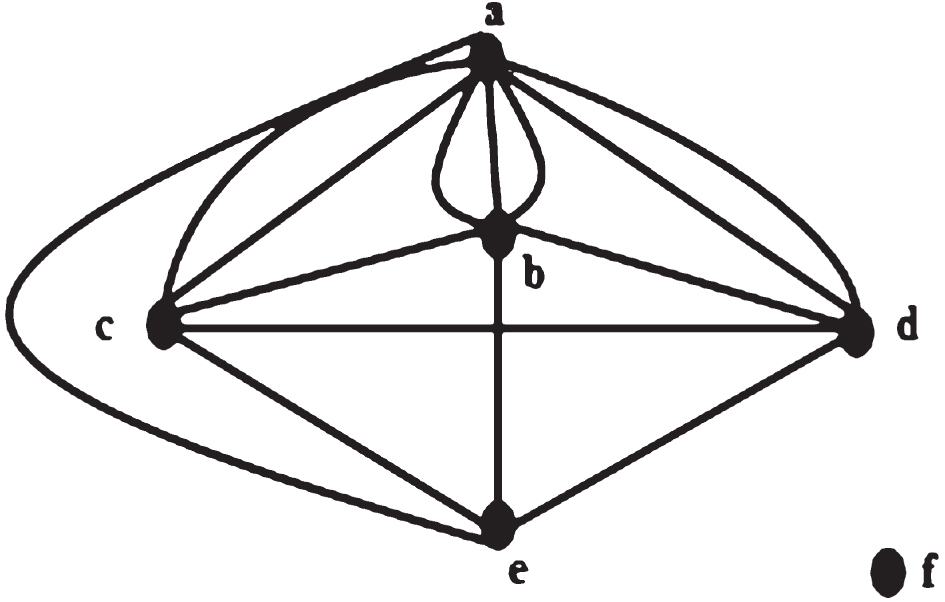
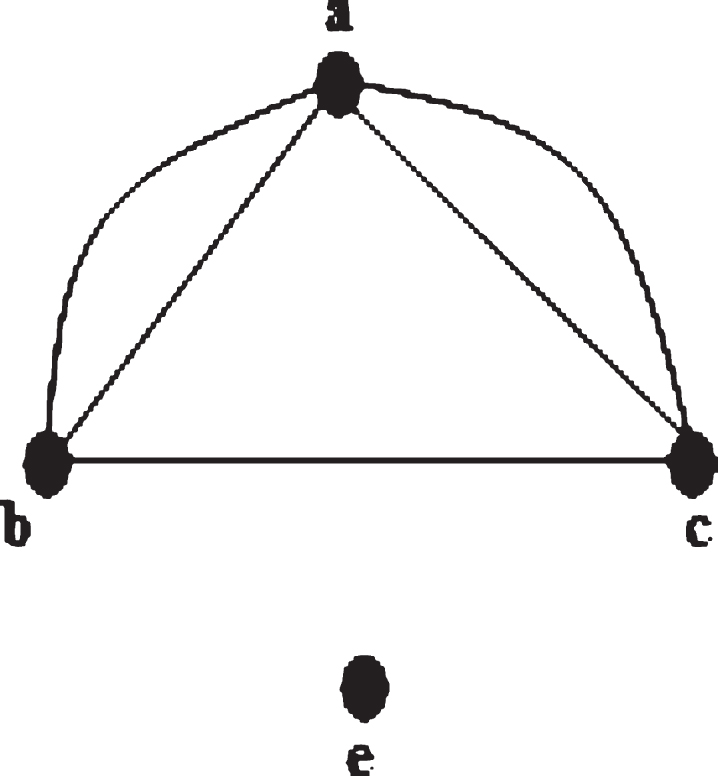
A graph which is a topological graph.
A graph which is not a topological graph.
In this section, we give an algorithm which describes graphs and its topological graphs. We use the topological dimension [3] as a tool for this algorithm. In this way, we calculate the degree of dimension which used to get the number of edges for graphs. In the algorithm below, d denotes to dimension, n = |X| and m = |A|, for any A ⊆ X.
1. Insert n,m.
2.
A i =insert d i .
3.
topology + = A i .
4.
degVA ∩ E = m (2n-m - 1).
degVA∩L = m (2n-m - 1) (2m-1 - 1).
degV A = m (2n-1 - 1).
|Edges| = n2n-2 (2n-1 - 1).
5.
|Edges| = n2n-2 (2n-1 - 1) + n2n-1.
6.
degV A = 2 n - 2n-m - 1.
7.
degV i = i * n.
An isomorphic between topological graphs
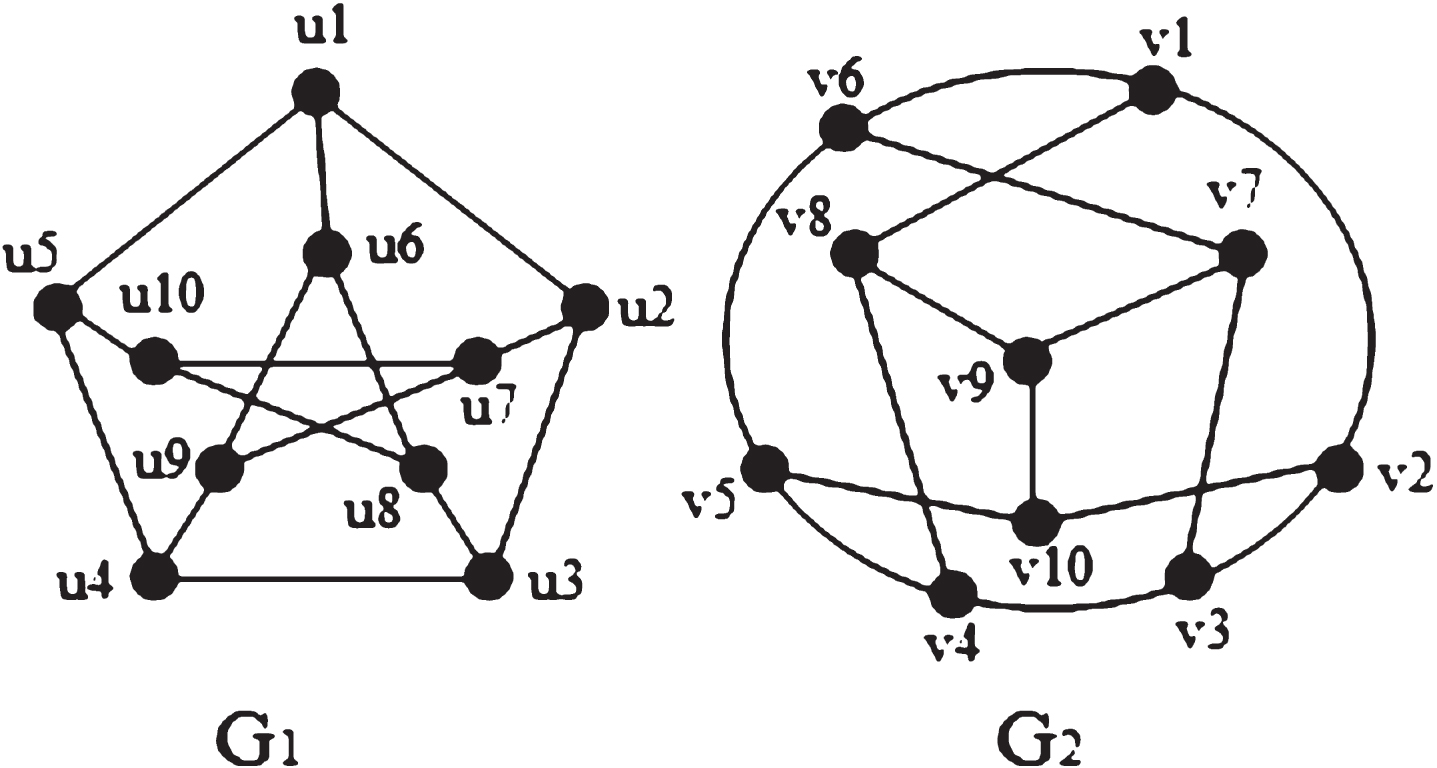
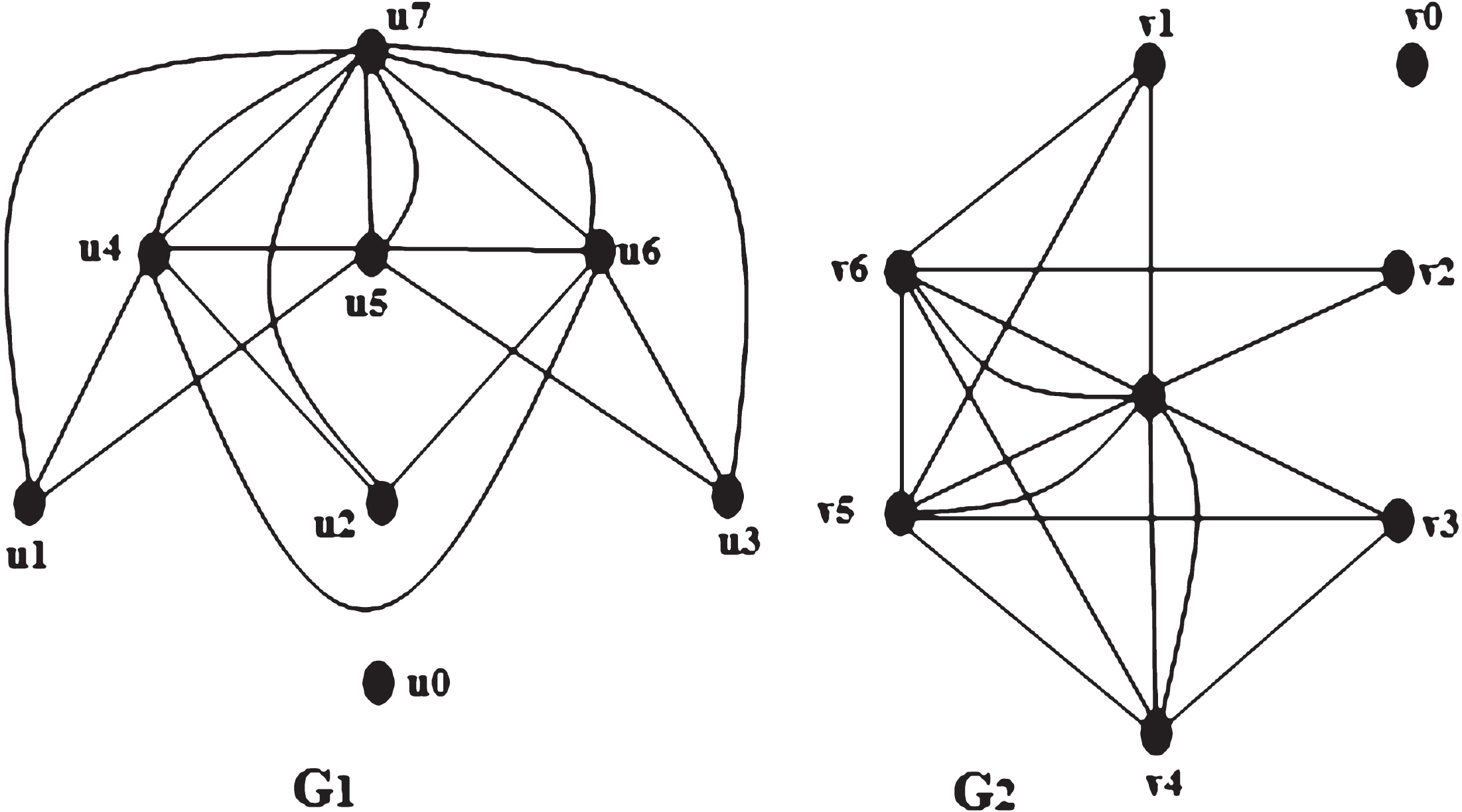
In this section, we study the isomorphic between graphs, which is an important property in graph theory, through the homeomorphic between its topological graphs which is a topological property. In our study, we use the topological graph stated in Section 3. The following examples discuss special types of graphs such as a Peterson graph in Fig. 11 and some other graphs in Fig. 12.
Two isomorphic graphs G1 and G2.
Two isomorphic graphs G1 and G2.
A topological graph of G1
A topological graph of G2
Homeomorphic between topological graphs of G1 and G2
Since there are a homeomorphic between topological graphs in Table 3, then G1 and G2 are isomorphic in Fig. 11.
A topological graph of G1
A topological graph of G2
Homeomorphic between two topological graphs of G1 and G2
Since there are a homeomorphic between topological graphs in Table 6, then G1 and G2 are isomorphic in Fig. 12.
The field of mathematical science which goes under the name of the topology is concerned with all questions directly or indirectly related to topological graphs. Therefore, the theory of graphs and topological spaces became the most important subjects in mathematics. On the other hand, topology plays a significant rule in quantum physics, high energy physics and superstring theory [5]. Thus we study the topological structure of graphs and calculate the degree of vertices and the number of edges of graphs which may have possible applications in quantum physics and superstring theory. Moreover, the concepts proposed in this paper can be extended in fuzzy topological structures [11] and thus one can get a more affirmative solution in decision making problems [9, 19–21] in real life solutions.
Footnotes
Acknowledgments
The authors would like to thank the Editors and Reviewers for careful and thorough reading of this manuscript and for the thoughtful comments and constructive suggestions, which help to improve the quality of this manuscript.