
Abstract
The flower pollination algorithm (FPA) is a recently developed meta-heuristic algorithm inspired by the pollination process of flowers. Similar to other meta-heuristic algorithms, it encounters two probable problems, i.e., entrapment in local optima and slow convergence speed, in solving challenging complex real world problems. Similar to the chaos in actual flower pollination process, this paper proposes new FPAs that employ chaotic maps for adjustment of parameters with the aim to improve the convergence rate and prevent the FPAs to get trapped on local optima. This is achieved by employing chaotic number generators every time, a random number is needed by the classical FPA. Two new chaotic FPAs have been proposed and various test problems are used for their performance evaluation. To check the effectiveness of the proposed algorithms, they are tested on various benchmark functions and engineering design problems with different characteristics having real world applications. The simulation results demonstrate that the chaotic maps are able to significantly boost the performance of FPAs.
Introduction
Optimization is a process of searching the most optimal solution among all available solutions of a particular problem. In consideration of the nature of optimization algorithms, these can be categorized broadly into two groups, i.e., deterministic algorithms and stochastic intelligent algorithms [1, 2]. In the case of deterministic algorithms, identical solutions are produced if its initial starting values are same when solving the same problem. These are gradient restricted methods which move rigorously towards the optimal solution [3]. In contradiction to deterministic algorithms, stochastic algorithms are gradient free techniques in which random steps are to be taken to reach the optima [4]. In these techniques, the optimization process cannot be repeated under any conditions. However, same final optimal solutions can be achieved by both of them in most of the cases. Stochastic algorithms are further classified into two types, i.e., heuristic algorithms and meta-heuristic algorithms [5]. Heuristic, as the name suggests, is the process of finding the solutions by trial and error method [6]. Many heuristic algorithms are being used in optimization area for example Bat Swarm Optimization (BSO) [7], Hill Climbing (HC) [8] and Simulated Annealing (SA) [9]. Meta-heuristic algorithms are the algorithms which solve the optimization problems stochastically having some prior knowledge about the random search. It is a process of optimization which starts with a random solution, then explores and exploits the search space randomly with a specific probability [10]. Since the last two decades, nature inspired meta-heuristic algorithms have become very popular due to their powerful and efficient performance in dealing with complex real world problems [11, 12]. These algorithms have the ability to exploit the useful information of the population in order to find the optimal solutions. Until now, substantial research has been done by various researchers on these algorithms and several nature inspired meta-heuristic algorithms have been introduced such as Particle Swarm Optimization (PSO) [13], Genetic algorithm (GA) [14], Differential Evolution (DE) [15], Firefly Algorithm (FA) [16, 17], Gravitational Search Algorithm (GSA) [18], Harmony Search (HS) [19, 20], Butterfly Optimization Algorithm (BOA) [21], Water Cycle Algorithm (WCA) [22, 23] and Flower Pollination Algorithm (FPA) [24]. These efficient and robust nature inspired meta-heuristic algorithms are utilized to tackle various problems such as economic dispatch optimization [25], optimization of operation sequencing in computer-aided process planning [26, 27], traveling salesman problem [28, 29], combinatorial optimization [30], tuning of fractional order proportional-integral-derivative controllers [31], feature selection [32] and optimal controller design [33].
FPA, in fact, is a recent meta-heuristic algorithm, inspired by the flower pollination process of flowering plants. This population based meta-heuristic has the ability to avoid local optima stagnation to some extent. It also has good convergence ability towards the optima. In general, FPA advances itself strongly to exploitation. However, it cannot always implement global search well. Thus, in some cases, FPA fails to find the global optimal solution. The search strategy used in basic FPA is mainly based on random walks and lèvy flights. Thus, it cannot always deal with the problem successfully.
With the development of the nonlinear dynamics, chaos theory has been widely employed in several applications [34]. In this perspective, one of the most well-known applications is the combination of chaos theory with various optimization techniques [35]. Till now, the chaos theory has been successfully introduced into various nature inspired optimization algorithms. Some of the important contributions in this field includes FA [36], PSO [37], DE [38], BOA [39], GAs [40], GSA [41], ABC [42], Imperialist Competitive Algorithm (ICA) [43] and Grey Wolf Optimization (GWO) [44]. Recently, chaos has been hybridized with flower pollination algorithm by using chaotic proximity probability p to switch between global and local pollination. The validation of this algorithm is done by employing the proposed method to solve definite integral [45] and integer programming problems [46]. However, there are various other possibilities of hybridizing the chaos theory with flower pollination and effective techniques must be used in order to properly validate the algorithms. In this study, sequences which are generated from various chaotic maps are replaced with random numbers for various parameters of FPA where random-based preference is a necessity. In order to achieve this task, various FPA methods which employ chaotic maps as a proficient substitute to random series have been proposed. By this way, it is aimed to accelerate the rate of global convergence and to prevent the FPAs to stuck on local optima. As these techniques do not follow the uniform distribution, so it is usually difficult to estimate how good most chaotic random number generator is, by applying statistical tests. The simulation results demonstrate that in order to improve the performances of FPA, the substitution of random sequences with deterministic chaotic signals may prove an efficient approach.
The rest of the paper is organized as follows. Review of FPA is summarized in Section 2. The selected ten chaotic maps are described in Section 3. Section 4 describes the proposed methods, i.e., Chaotic flower pollination algorithms, shortly CFPAs. Section 5 provides the simulation platform and different benchmark test problems used for comparisons of the proposed methods. In Section 6, the testing of the proposed methods using different benchmark test problems are carried out and the simulation results are compared. To evaluate the performance of the proposed CFPAs over engineering problems, i.e., spring design, welded beam design and gear train design have been solved and results are discussed in Section 7. Finally, the conclusions and further directions of research are drawn in Section 8.
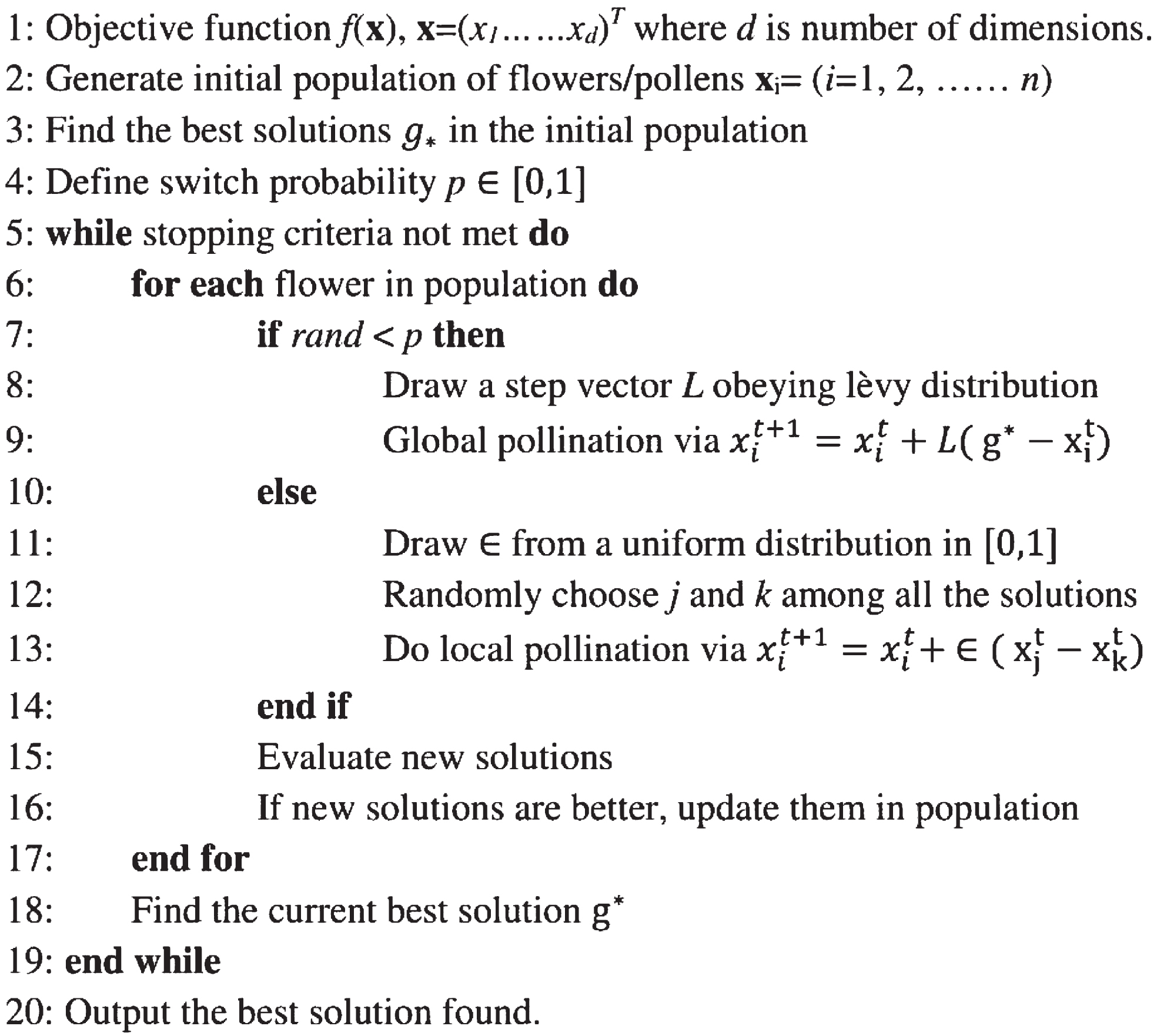
Flower pollination algorithm
Flower Pollination Algorithm (FPA) is inspired by the flower pollination process of flowering plants [24]. Biologically, a flower can achieve pollination by cross-pollination or self-pollination. Generally speaking, cross-pollination can be defined as the way of pollination which takes place from pollen of a flower of a different plant, whereas self-pollination can be defined as the fertilization of a flower from pollen of the identical flower or different flowers of the identical plant, which often happens due to the unavailability of reliable pollinator. Cross-pollination is considered as the global pollination and self-pollination is considered as local pollination. These two processes are mathematically represented in Equations (1) and (2).
In general terms, chaos is a deterministic, random- like method found in non-linear, dynamical system, which is non-periodic, non-converging and bounded. Mathematically, chaos is the randomness of a simple deterministic dynamical system and chaotic system may be considered as a source of randomness [47]. The nature of chaos is apparently random and unpredictable and it also possesses an element of regularity. Chaos employs chaotic variables rather than random variables [36]. Therefore, it can perform downright searches at higher speeds compared to the stochastic searches that mainly rely on probabilities [36]. Merely a few functions (chaotic maps) and few parameters (initial conditions) are needed even for very long sequences. In addition, an enormous number of different sequences can be generated simply by changing its initial condition. Moreover, these sequences are deterministic and reproducible. Furthermore, it has a very sensitive dependence upon its initial condition and parameter [47, 48].
A wide variety of different chaotic maps is available in optimization field [49]. In the present work, 10 most widely used uni-dimensional chaotic maps have been used [50]. The mathematical modulation of these chaotic maps used is described in the Sections 3.1 to 3.10.
Chebyshev map
The Chebyshev map is formulated as:
The Circle map is defined as:
This equation will generate chaotic numbers between (0, 1) by using P = 0.5 and b = 0.2. P is taken as a control parameter here.
The equations of the Gauss map are defined as follows:
This map also generates chaotic sequences in (0, 1).
The Iterative chaotic map equation is expressed as:
The Logistic map is represented by the following equation:
The family of Piecewise map can be represented as:
This map is defined as follows:
P is the control parameter having values in the range (0, 4).
The singer map is formulated as:
This map is defined as follows:
In this paper, the simplified equation of this map is used by using P = 2.3 and x0 = 0.7 which can be formulated as:
The equation of the tent map can be represented as:
Recently, chaotic sequences have been employed as a replacement for random sequences and interestingly, to some extent superior results have been revealed in various applications such as DNA computing [51], secure transmission [52, 53], nonlinear circuits [54] and image processing [55]. The choice of chaotic sequences is justified theoretically by their unpredictability, i.e., by their ergodic properties and spread-spectrum characteristics.
Random initialization of FPA and the proximity probability which is selected randomly may affect the convergence speed of the algorithm. In order to improve the global convergence rate, new techniques which incorporate the chaotic maps with irregularity, ergodicity and the stochastic property in FPA are proposed in this research work. The use of chaotic sequences in FPA can be useful to escape more easily from local minima in comparison to the standard FPA. New chaotic FPA (CFPA) algorithms may be simply classified and described as follows:
Chaotic CFPA1
As depicted in Fig. 1, the initial population (flowers) is generated by iterating the selected chaotic maps until reaching to the population size. A member of the population can be represented as xi,j, where i is the member and j is the dimension.
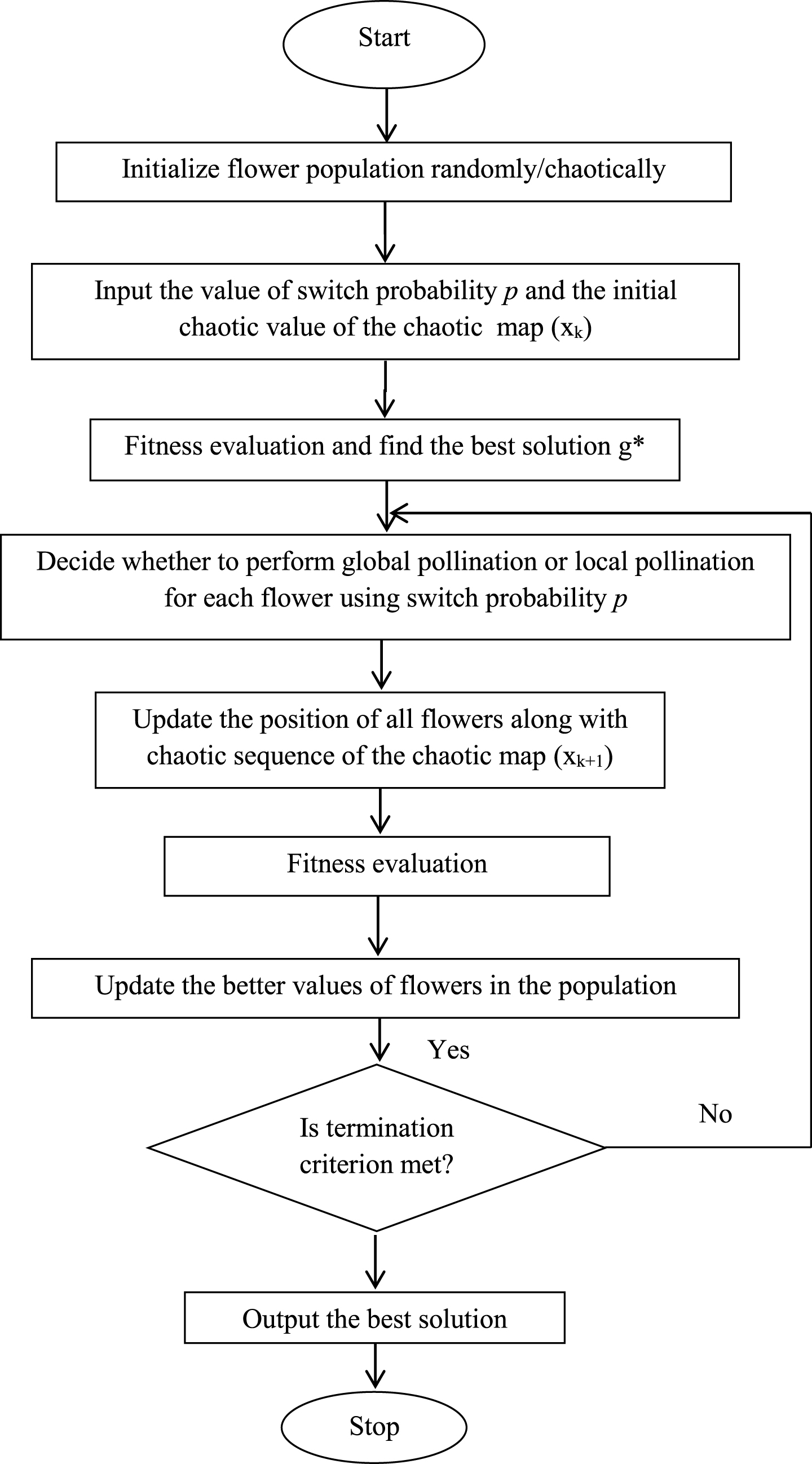
Flowchart of the proposed CFPAs.
In this algorithm, the switch probability p which controls the global and local searching abilities of the FPA is replaced with a chaotic number. CFPA2 is similar to the chaotic FPA algorithms proposed in the literature [45, 46].
Chaotic CFPA3
CFPA1 and CFPA2 are combined, i.e., the initial population is generated by iterating the selected chaotic maps and a chaotic variable controls the intensification and diversification of the algorithm as shown in Algorithm 2.
For FPA, the time complexity is O(nt) where n is the population size and t is the number of iterations because there is a single loop for going through the population. Therefore, in this case, for our proposed Chaotic FPAs, the time complexity is O(nt) because in the same loop next chaotic sequence will be calculated. As n is small (in this case, n = 30), and t is large (in this case, t = 500), the additional computation cost is relatively inexpensive because the algorithm’s complexity is linear in terms of t. The main computational cost will be in the iterations of the objective function. Moreover, only the current chaotic value is required to calculate the next value of the chaotic sequence, so the addition of chaos theory doesn’t affect the space complexity of the proposed algorithms.

Optimization testbed and simulation platforms
Benchmark numerical experiments
Every novel optimization algorithm must be subjected to well-defined benchmark functions in order to measure and test its performance. There are many benchmark functions available, however, there is no standardized set of benchmark functions which is agreed upon for validating new algorithms [56]. Therefore, in order to validate and benchmark the performance of proposed Chaotic Flower Pollination Algorithms (CFPAs), simulations on one unimodal (containing only one optima) as well as on two multimodal (containing many local optima, but only one global optimum) benchmark functions are conducted [39, 42]. These testbed benchmark functions are chosen in order to determine various features of the algorithm such as fast convergence, ability to jump out of local optima and avoid premature convergence. Table 1 shows the major properties of the selected benchmark functions used in the simulations. CFPAs are implemented in C++ and compiled using Nokia Qt Creator 2.4.1 (MinGW) under Microsoft Windows 8 operating system. All the simulations are carried out on a computer with an Intel(R) Core(TM) i5 - 3210 @ 2.50GHz CPU.
Mathematical benchmark problems
Mathematical benchmark problems
The final simulation results are observed to be almost independent of the initial supposition. In order to measure the performance of the algorithms, statistical measures such as best, mean, and worst objective values along with their standard deviations are used. In the main text, many tables are provided to demonstrate this method. Some extensive sensitivity studies of parameters such as the population size are carried out for most cases in our implementation. Our simulations study suggested that the population size n = 30 will be adequate for most of the problems. The maximum number of iterations is fixed to 500 and a fixed number of n flowers is used at each run.
Criterion of success
As another investigation, success rates of all the algorithms are calculated in order to discover the potential of the algorithms and carry out more meaningful statistical analysis. For a fair evaluation, the whole population of each algorithm is initialized in regions which include global optimum. It is worth pointing out here that the goal of this experiment is not to find global optimum value but to find out the potential of the algorithms. There are various criteria for evaluating the performance of the algorithms available in the literature. In the current study, an algorithm’s success rate is defined as [36]:
Statistical results
The statistical results such as best, mean, median, worst and standard deviation of runs obtained by the standard FPA and CFPAs for the Sphere, Griewank and Rastrigin functions are presented in Tables 2–11 respectively. In CFPA1, the initial population of flowers is generated by iterating the selected chaotic map. Here, the initial random value of flowers is replaced with different chaotic maps introduced in Section 3. In order to achieve this, all the maps are normalized between lower bound and upper bound range of the given benchmark function.
Statistical results of standard FPA for benchmark functions
Statistical results of standard FPA for benchmark functions
Statistical results of CFPA1 for Sphere function
Statistical results of CFPA1 for Griewank function
Statistical results of CFPA1 for Rastrigin function
Statistical results of CFPA2 for Sphere function
Statistical results of CFPA2 for Griewank function
Statistical results of CFPA2 for Sphere function
Statistical results of CFPA3 for Sphere function
Statistical results of CFPA3 for Griewank function
Statistical results of CFPA2 for Rastrigin function
It is worthwhile to mention that for solving unimodal sphere functions, the chaotic maps are more effective. From Tables 3–5, it is observed that in comparison with other chaotic maps and standard FPA, the Sinusoidal map has the best performance in solving sphere function.
As it is mentioned, one of the main parameters of FPA is the proximity probability p. Here, this value, p, is substituted with values generated by various chaotic maps in order to improve the performance of FPA. To accomplish this, normalization of all the maps is done between 0 and 1. The simulation results obtained by the CFPA2 are presented in Tables 6–8 for the test functions.
From the simulation results, it can be observed that the statistical results obtained by the CFPAs are very good. As it is seen, the best values and means values obtained by the CFPAs are far better than those of the standard FPA. It appears that in comparison with other chaotic maps, the Singer map has shown superior performance in both the benchmark functions and the results from statistical tests also confirm this.
As demonstrated in Tables 3–8, tuning of the initial population and proximity probability are both effective. Another possible chaotic FPA, i.e., CFPA3 in which both the parameters, initial population and proximity probability, are tuned by chaotic maps.
The results for the CFPA3 algorithm using the different chaotic maps are demonstrated in Tables 9–11. The statistical results suggest that there is a significant improvement when both the parameters are substituted with the values produced by the chaotic maps. Further, it is also analyzed that the best chaotic algorithm is the one using the Singer map. The performance of this algorithm is considerably better than the standard FPA and otherCFPAs.
Figure 2 shows the functions values for Sphere function on Logistic and Singer map. Sphere function can also be regarded as a unimodal function. It is clear from Fig. 2 that when CFPA3 utilize Logistic map, it greatly overtakes all other algorithms. CFPA3 reaches the optimal solution considerably earlier than the other algorithms. Analogous to the Logistic map, Singer map also enhances the performance of FPA. In this case, CFPA3 has the stable convergence rate towards the global solution and overtakes all other algorithms in this unimodal benchmark function. Logistic and Singer map are not able to improve the performance of CFPA1, while the performance of CFPA2 is inferior to CFPA3.
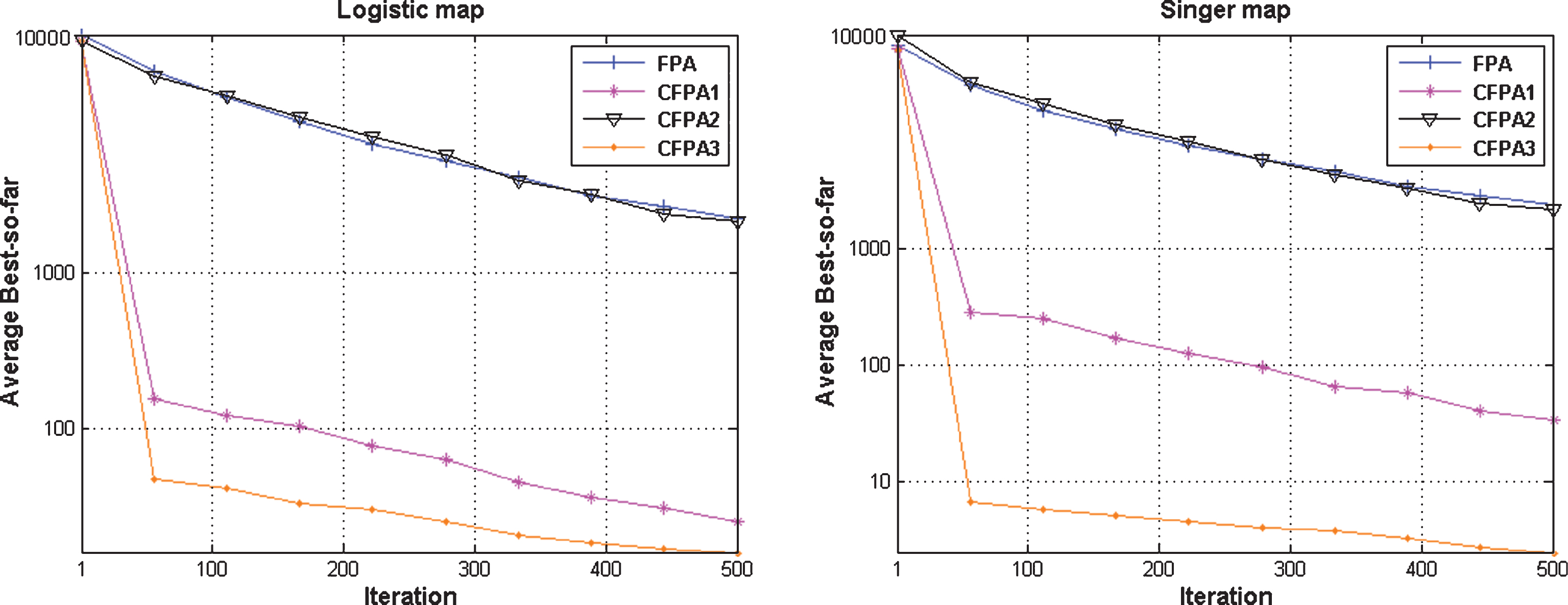
Convergence curves of FPAs on sphere function.
Figure 3 illustrates the functions values for the Rastrigin function which is a difficult multimodal function with a unique global minimum of 0 and several local optima. At first glance, it is obvious that CFPA3 has the fastest convergence rate towards the global solution in the whole optimization process. In this case also, the performance of CFPA2 is almost equal to FPA which means the chaotic maps were not able to improve the performance of FPA. CFPA3 reaches the optimal solution significantly earlier than other algorithms using the Chebyshev and Piecewise map. This indicates that the performance of FPA can be boosted by utilizing Chebyshev and Piecewise map in terms of not only exploration but also exploitation.
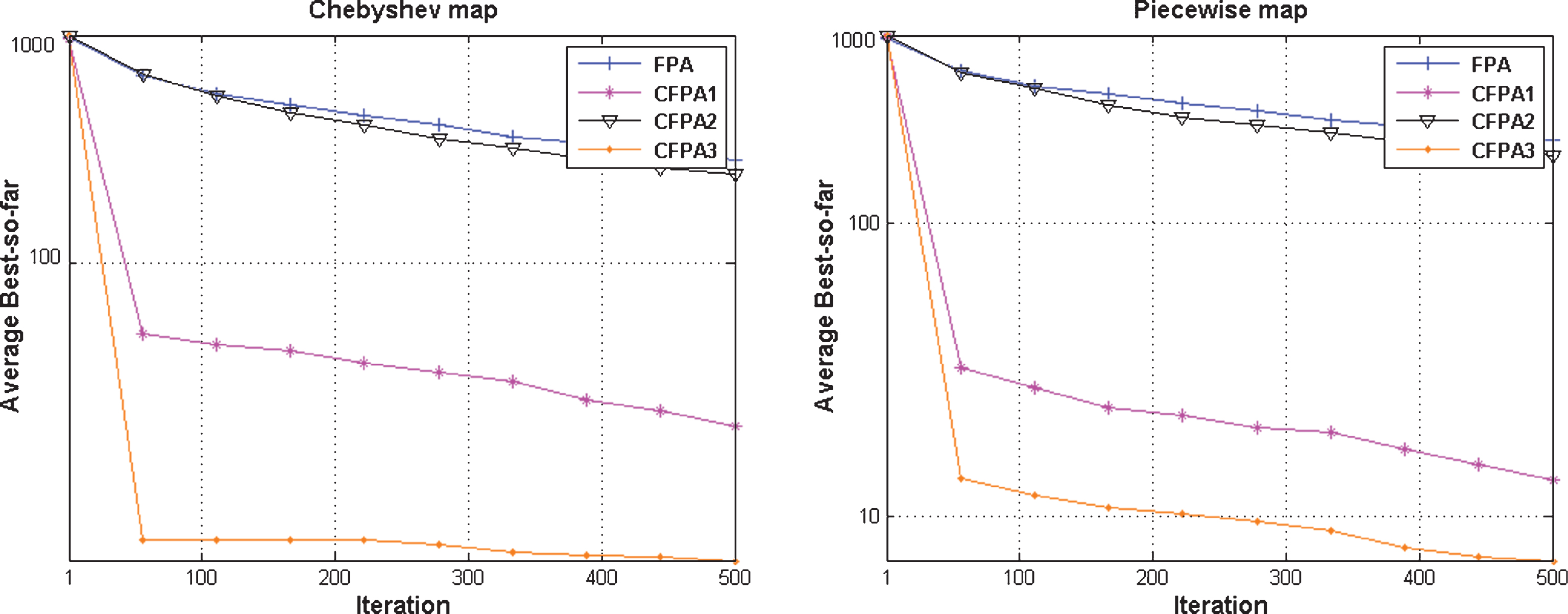
Convergence curves of FPAs on rastrigin function.
Figure 4 reveals the function values for Griewank function which has a strange property, as it is much easier to solve for higher dimensions than lower dimensions. From Fig. 4, it can be seen that Circle map has improved the performance of CFPA3 and it has the best performance for this benchmark. Similarly, Sinusoidal map has also enhanced the performance of FPA. It is worth mentioning that the convergence curves of FPA, CFPA1 and CFPA2 are worse than those of CFPA3 in this case too. This is due to boosting the exploration of the FPA utilizing these chaotic maps simultaneously, whereby the FPA can avoid local optima much better. Considering the results shown in Figs. 2–4, it can be concluded that the performance of CFPA3 is superior to the other algorithms. Moreover, the implementation of CFPAs is simple and easy, and no effect is made to fine-tune the parameters. The results demonstrate that the CFPA3 to be robust over all kinds of benchmark functions.
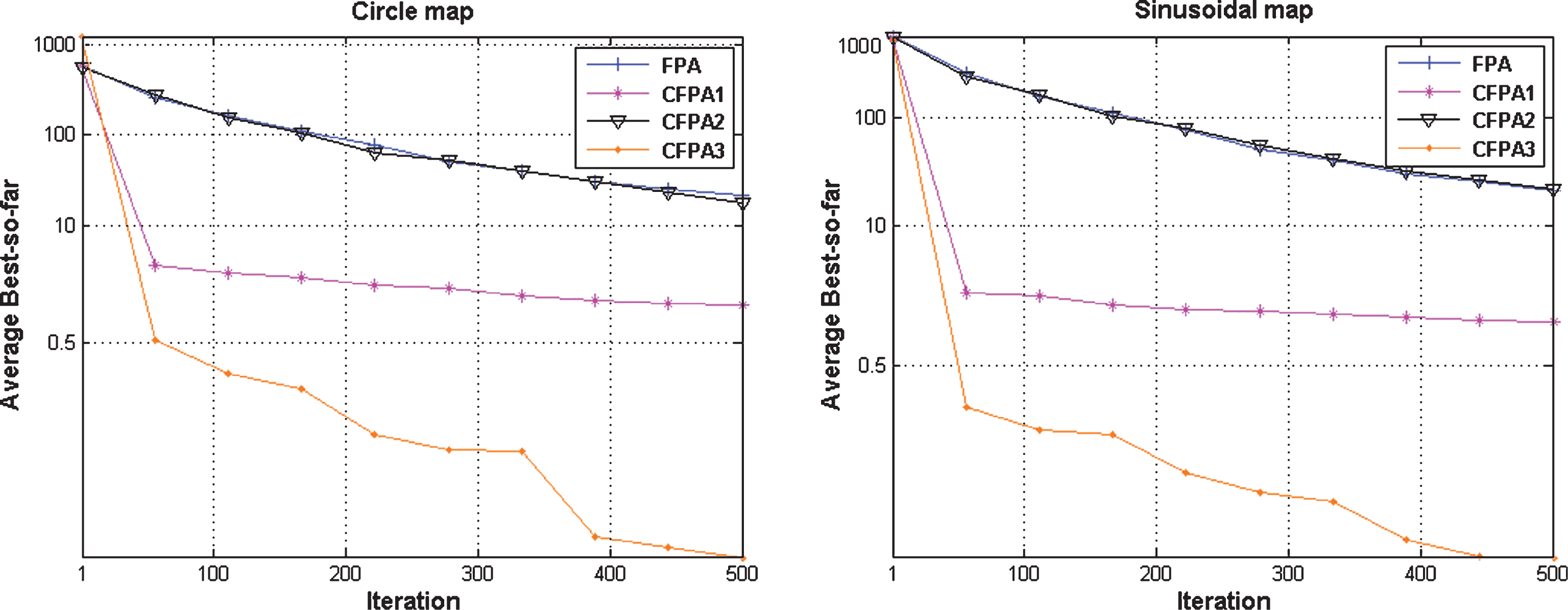
Convergence curves of FPAs on griewank function.
Using different chaotic maps, success rates of CFPA methods for Sphere, Griewank and Rastrigin function are shown in Tables 12, 13 and 14, respectively. The simulation results demonstrate the enhancement of the newly proposed algorithms due to the application of chaotic variables in place of constant values. Success rates and statistical results of the CFPAs confirm that the proposed CFPAs clearly enhance the quality of the results and also improve the reliability of the global optimality. The underlying reason behind better performance of CFPAs is that by the introduction of deterministic chaotic signals, the tradeoff between exploration and exploitation is improved. The chaotic variable also facilitates the CFPAs to explore the search space more randomly which helps the algorithms to avoid local optima stagnation and hence reach the optima more quickly. Thus, it can be said that the performance of the proposed CFPAs is better. In fact, most of the results obtained from CFPA1 and CFPA3 are superior to that from classical FPA and CFPA2.
Success rates of CFPAs for the Sphere benchmark function
Success rates of CFPAs for the Sphere benchmark function
Success rates of CFPAs for the Griewank benchmark function
Success rates of CFPAs for the Rastrigin benchmark function
It is worthwhile to mention that the performance of an algorithm varies according to the chaotic maps embedded, however for a particular problem, a unique best chaotic map cannot be selected as there are usually some chaotic maps which can demonstrate equal performance. So, without doing actual simulations, selecting a chaotic map is not an easy task. Nevertheless, from our simulation results, it is observed that better results can be achieved by employing those chaotic maps which have a unimode centered around the middle of maps, and Sinusoidal and Singer map belongs to this category, and indeed they are very effective.
It has been proved that considering certain assumptions, any single algorithm cannot be considered as the best on average for all problems [57]. It means that an algorithm might be able to solve some problems better than the other algorithms and some problems worse than other algorithms. Therefore, to appropriately evaluate the optimization power of the proposed CFPAs without a biased conclusion, three popular engineering design problems, i.e., spring design, welded beam design and gear train design problem are considered and solved.
Each constrained optimization problem has different nature of objective functions, decision variables, equality and inequality constraints and a penalty function. The parameters of penalty function must be set to correct values in order to get optimal solution. When constrained handling mechanism directly affects the position of the search agents using specific fitness function, it becomes very challenging to solve the constrained optimization problem. A complex penalty function is also used in the problems mentioned which penalize the search agents according to the level of violation done by them. If penalty is given to the best flower then it will make the best flower less fit. Then, that less fit flower will get replaced with a fitter flower in next iteration. For each engineering design problem, the number of iterations for CFPAs is fixed to 500. It is worthwhile to mention that no attempt has been made to optimize the parameter settings of CFPAs.
Tension/compression spring design
The main goal of this engineering design problem is to minimize the weight of the spring involving three decision variables which are wire diameter (d), mean coil diameter (D), and the number of active coils (N), as illustrated in Fig. 5. The minimization process is subject to some constraints such as shear stress, surge frequency, and minimum deflection [58, 59].

Schematic representation of spring.
The mathematical formulation of this problem is as follows:
The simulation results of CFPAs are compared with GWO [60], GSA [61], PSO [62], Evolution Strategy (ES) [63], GA [64], HS [65], and DE [66]. The mathematical approaches that have been used to tackle this problem are Numerical Optimization Technique (NOT) [68] and Mathematical Optimization Technique (MOT) [69]. The comparison of results of these techniques and CFPAs are provided in Table 16 which suggests that CFPA finds a design with the minimum weight for this problem.
Success rates of standard FPA for the benchmark functions
Comparison of results for spring design problem
The goal of this engineering design problem is to minimize the cost of fabrication of a welded beam as shown in Fig. 6 [64]. This problem has four variables such as length of attached part of the bar (l), thickness of weld (h), thickness of the bar (b) and height of the bar (t). The constraints are bending stress in beam (h), shear stress (s), end deflection of the beam (d), buckling load on the bar (P
c
) and the side constraints. This problem can be mathematically defined as:
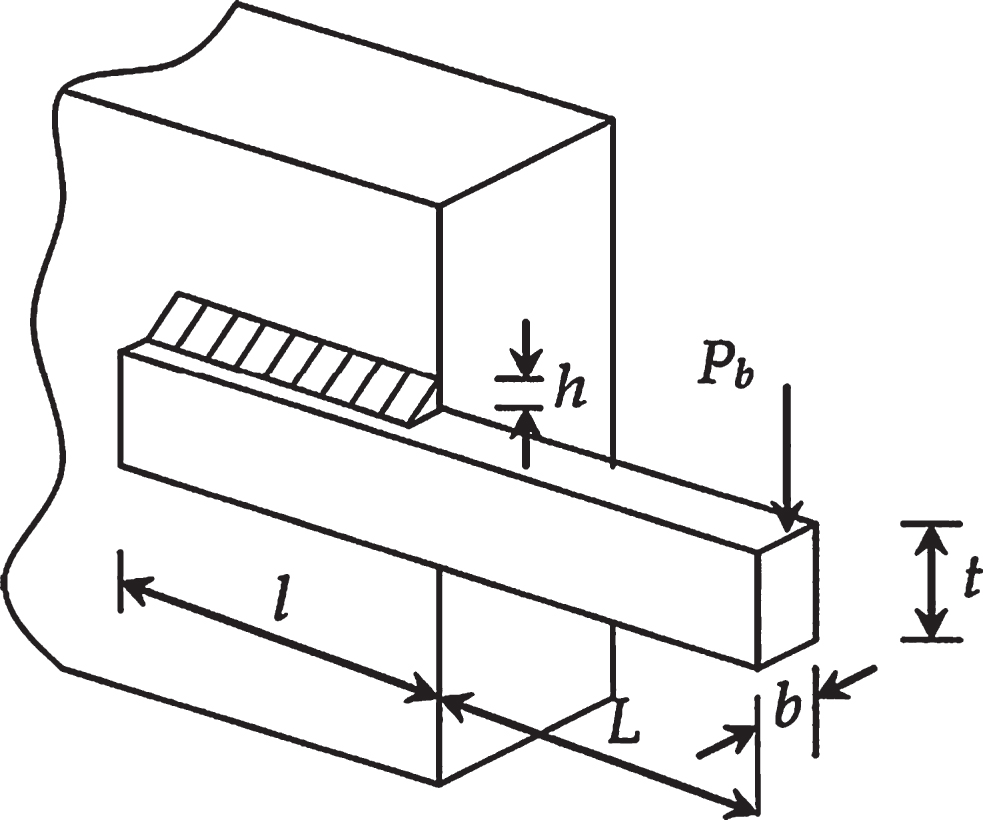
Schematic representation of welded beam.
In the past, this problem is solved by GWO [60], GSA [61], HS [70] and GA [71–73]. Various mathematical approaches viz. Richardson’s random method, Simplex method, Davidon-Fletcher-Powell, Griffith and Stewart’s successive linear approximation have also been employed to solve this problem [68]. According to the results shown in Table 17, CFPA finds a design with the minimum cost in comparison to other approaches.
Comparison results of welded beam design problem
Gear train design problem is a discrete optimization problem which was introduced by Sandgran [69]. The objective of this problem is to minimize the gear ratio cost of the gear train. It consists of four integer variables viz. T a , T b , T d and T f , ranging between 12 and 60.
This problem comprises of minimizing the cost of the gear ratio of a compound gear train (see Fig. 7). Mathematically, the gear ratio can be writtenas:
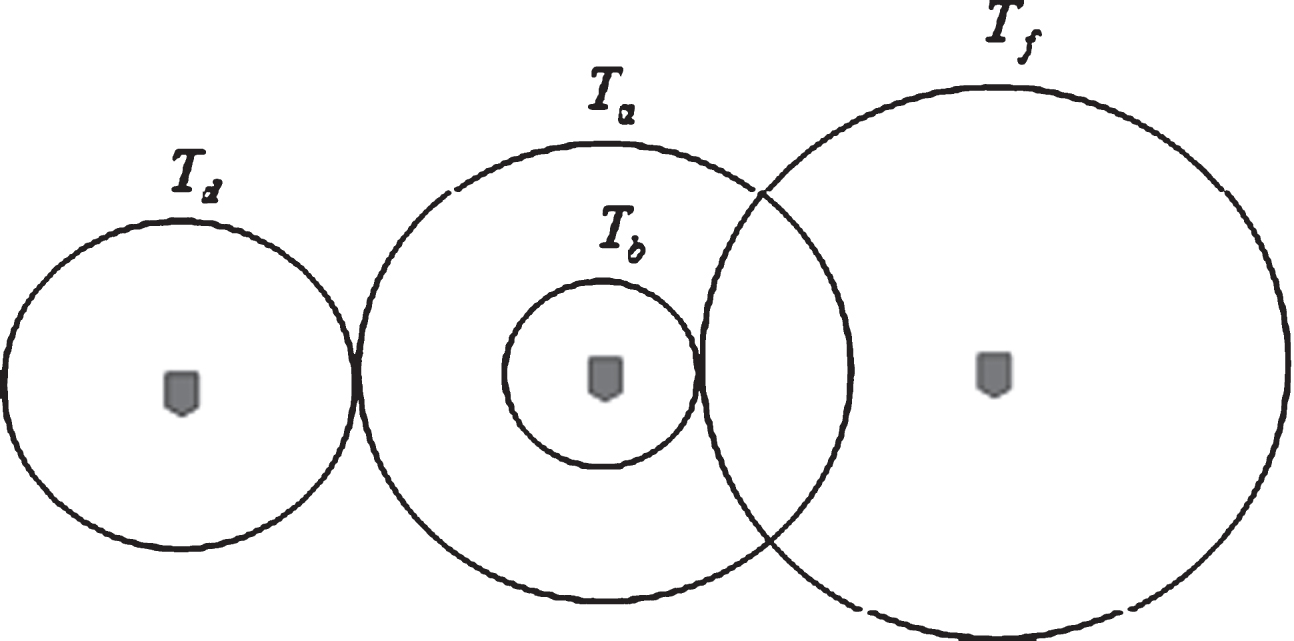
Schematic representation of gear.
This problem has also been popular among researchers and optimized in various studies. The methods that have been adopted to optimize this problem are PSO [75], CAPSO [37], CS [74], GeneAS [77], SA [79] and GA [81]. Various other approaches used to solve to this problem are nonlinear integer and discrete programming (NLDP) [69], Sequential Linearization approach (SL) [76], Mixed Integer Discrete Continuous Optimization (MIDCO) [82], Mixed Integer Discrete Continuous Programming (MIDCP) [80] and Mixed Variable Evolutionary Programming (MVEP) [78]. According to the simulation results demonstrated in Table 18, the solution obtained by the proposed CFPA is equivalent to the results in the literature.
Comparison results of gear train design problem
The chaos theory and flower pollination algorithm are hybridized in order to design novel improved Chaotic Flower Pollination Algorithms (CFPAs) for solving global optimization problems. Several chaotic maps are employed to adapt the parameters of FPA. In this research work, two novel CFPAs are proposed and ten chaotic maps are analyzed in the test functions. The simulation results suggest that there is substantial enhancement of the proposed algorithms with the employment of deterministic chaotic signals instead of constant values. The statistical results demonstrate that the tuned CFPA significantly enhances the quality of the solutions and the reliability of the global optimality. In this study, the performance of the proposed CFPAs seems to significantly better than the other CFPAs proposed in the literature. The simulation results of CFPA on classical engineering problems proved that the proposed CFPAs can be successfully applied to complex real-world problems as well.
Further studies on convergence analysis may prove fruitful. It is anticipated that different chaotic maps may demonstrate different convergence rate on different types of problems. Additionally, CFPAs can be used to solve discrete optimization problems and mixed-type problems.