
Abstract
In this paper a dynamic tracking control of mobile robot using neural network global fast sliding mode (NN-GFSM) is presented. The proposed strategy combines two control approaches, kinematic control and dynamic control. The laws of kinematic control are based on GFSM in order to determine the adequate velocities for the system stability in finite time. The dynamic controller combines two control techniques, the GFSM to stabilize the velocities errors, and a neural network controller in order to approximate a nonlinear function and to deal the disturbances. This dynamic controller allows the robots to follow the desired trajectory even in the presence of disturbances. The designed controller is dynamically simulated by using Matlab/ Simulink and the simulations results show the efficiency and robustness of the proposed control strategy.
Keywords
Introduction
The mobile robot is a nonholonomic mechanical system characterized by kinematic constraints. Using Lagrange-Euler formalism and differential geometry, a general dynamical model can be derived for such mobile robots with nonholonomic constraints [16].
The problem of mobile robot is the motion under the previously mentioned constraints, because the integration of the nonholonomic kinematic constraints influences the mobile robot dynamics [23].
In recent years, different control techniques have been introduced to control the mobile robot navigation. Due to the intrinsic nonlinearity in the mobile robot dynamics and the nonholonomic constraints, nonlinear architectures as adaptive and intelligent methods [7, 17], backstepping [14, 18] feedback linearization [24] and sliding mode control [28] have been studied.
To solve the tracking problems, some researches are deployed. Sliding mode control methods are proposed for mobile robots [2, 5]; similar problem with bounded disturbances is considered in [21]. The control laws, which assure the convergence in finite time, are introduced in [25, 26]. By combining cascaded design and backstepping approach, a tracking controller is designed in [6, 8] and the consideration of the input torque saturation and the external disturbances are introduced. A fuzzy logic approach for mobile robot path tracking is treated in [1].
The neural network controller can deal with not modelable bounded disturbances and/or unstructured dynamics of the mobile robot. Therefore, a control structure that makes possible the integration of a kinematic controller and a neural network (NN) computed-torque controller is presented in [22]. Fault – tolerant control for class of nonlinear MIMO discrete-time system via reinforcement learning algorithm, which use adaptive parameters of neural networks, is presented in [29]. A neuro-fuzzy network (NFN) dynamic controller for mobile robots is presented in [11], with a combined kinematic/dynamic control law using backstepping, and the stability is guaranteed by Lyapunov theory.
Recently, a novel dynamic unknown input observer is used for sensor fault and system state estimation in [10]. The disturbances attenuation is made by using weighted H∞.
In new researches of tracking control, a finite time tracking control is proposed in [12, 19]. A global finite-time tracking controller is given for the nonholonomic systems in [27]. The study of the system stability for a limited time is presented in [3, 15].
The majority of papers that revolve around dynamic control of mobile robot are based on backstepping kinematic controller. In the literature there is no study about dynamic tracking control of mobile robot in finite time. This background provides the motivation for the present study.
The main contributions of this paper are summarized as follows:
Use of a kinematic controller, which is based on fast sliding mode, allowing to get the adequate velocities and to stabilize the position errors in finite time. Proposal of a hybrid dynamic controller, which combines neural network and global fast sliding mode to generate smooth torque, in presence of disturbances, in relatively short time.
The paper is organized as follows. Section 2 presents the mobile robot modeling (kinematic and dynamic modeling). Section 3 resumes RBF neural network. The control strategy is presented in Section 4. The simulation and analysis of the improved algorithm are presented in Section 5. Finally, conclusions are drawn in Section 6.
Mobile robot modeling
Modeling of nonholonomic mobile robots consists on two models: kinematic model and dynamic model.
Kinematic model
The robot kinematics is defined by:
Where ϑ represents the control vector (v, ω) T .
In trajectory tracking, the velocity and the posture references are defined by q r , ϑ r and they are written as:
If the mobile robot has a posture q = (x, y, θ) T in a global referential (X,O,Y) and if a referenced posture q r = (x r , y r , θ r ) T is considered, as shown in Fig. 1, then the posture error is given q e = (x e , y e , θ e ) T .
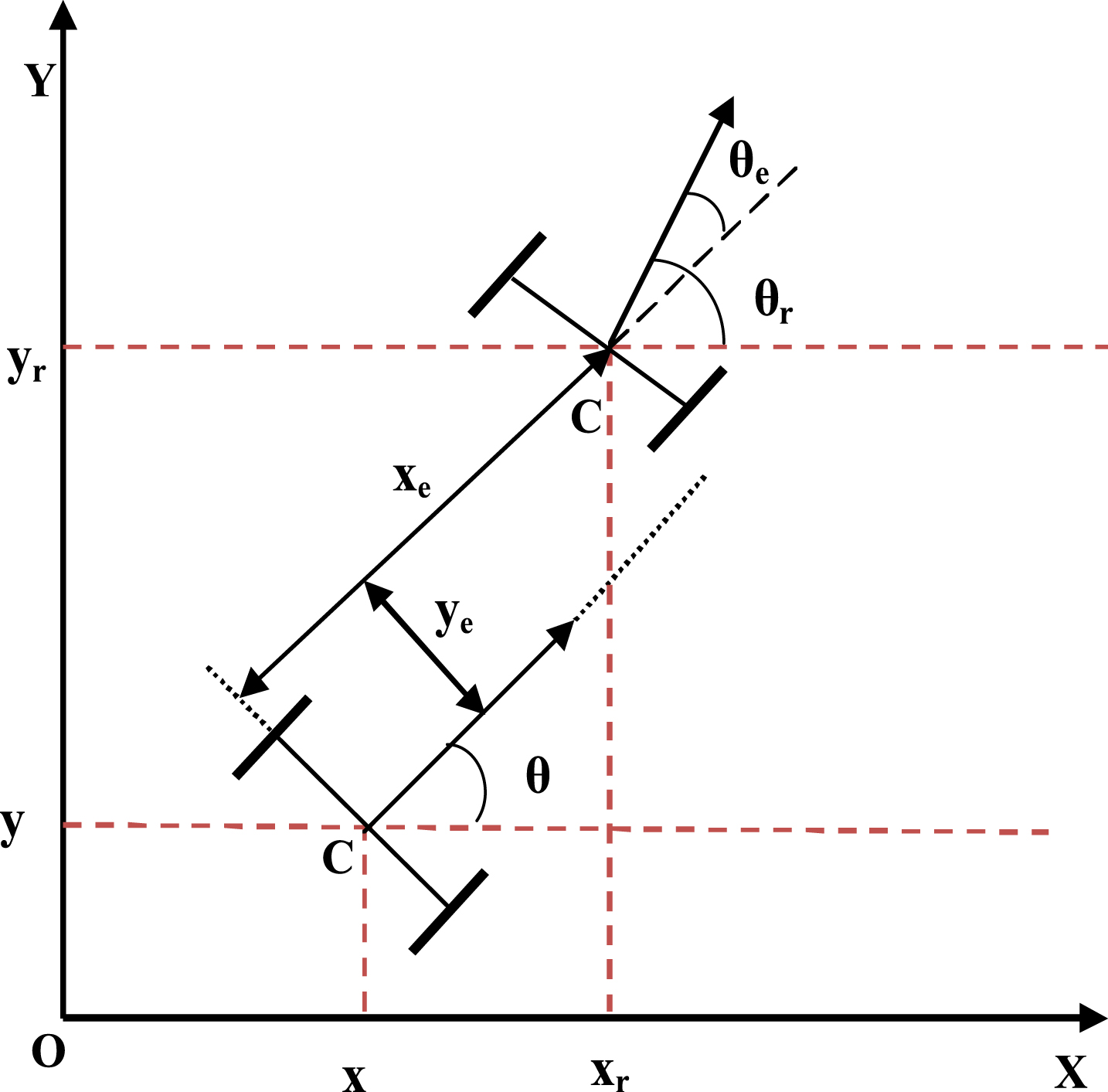
Posture error description.
According to coordinate transformation, the posture error equation of the mobile robot is described as:
When the matrix P can be written as:
The equation, characterizing the slip-free rolling of a wheel on the ground, representing the nonholonomic constraints is presented in Equation (6).
Using the Equation (6) and some trigonometric relations, the derivative of the Equation (5) can be obtained as below:
Dynamic modeling in general is the study of the system motion in which forces are modeled and it can include energies and the associated speeds.
The general dynamic model can be described by Equation (8).
Where: M (q) is the symmetric positive definite inertia matrix,
The above system can be transformed into a more proper representation for control and simulation purposes. Equations (9–11) are defined to do this transformation:
The matrix S (q) has the following relation with A (q) matrix:
Replacing Equations (10 and 11) in Equation (8), and multiply this last by S
T
(q), therefore Equation (8) can rewrite itself as:
With:
G (q)= 0, because the motion is constrained to the ground.
Equation (13) is the equation which is used for the control and simulation analysis of the robot. The dynamic modeling of the robot is presented in [22].
RBF networks are adaptively used to approximate the uncertain nonlinear function. The algorithm of a radial basis function (RBF) networks is defined in [20] as:
Where z is the input state of the network, i is the input number of the network, j is the number of hidden layer nodes in the network, h = [h1 h2 … h n ] T is the output of Gaussian function. W is the neural network weights, and ɛ ≤ ɛ N .
RBF network approximation f is used. The output of RBF network is:
The Fig. 2 represents an RBF network.
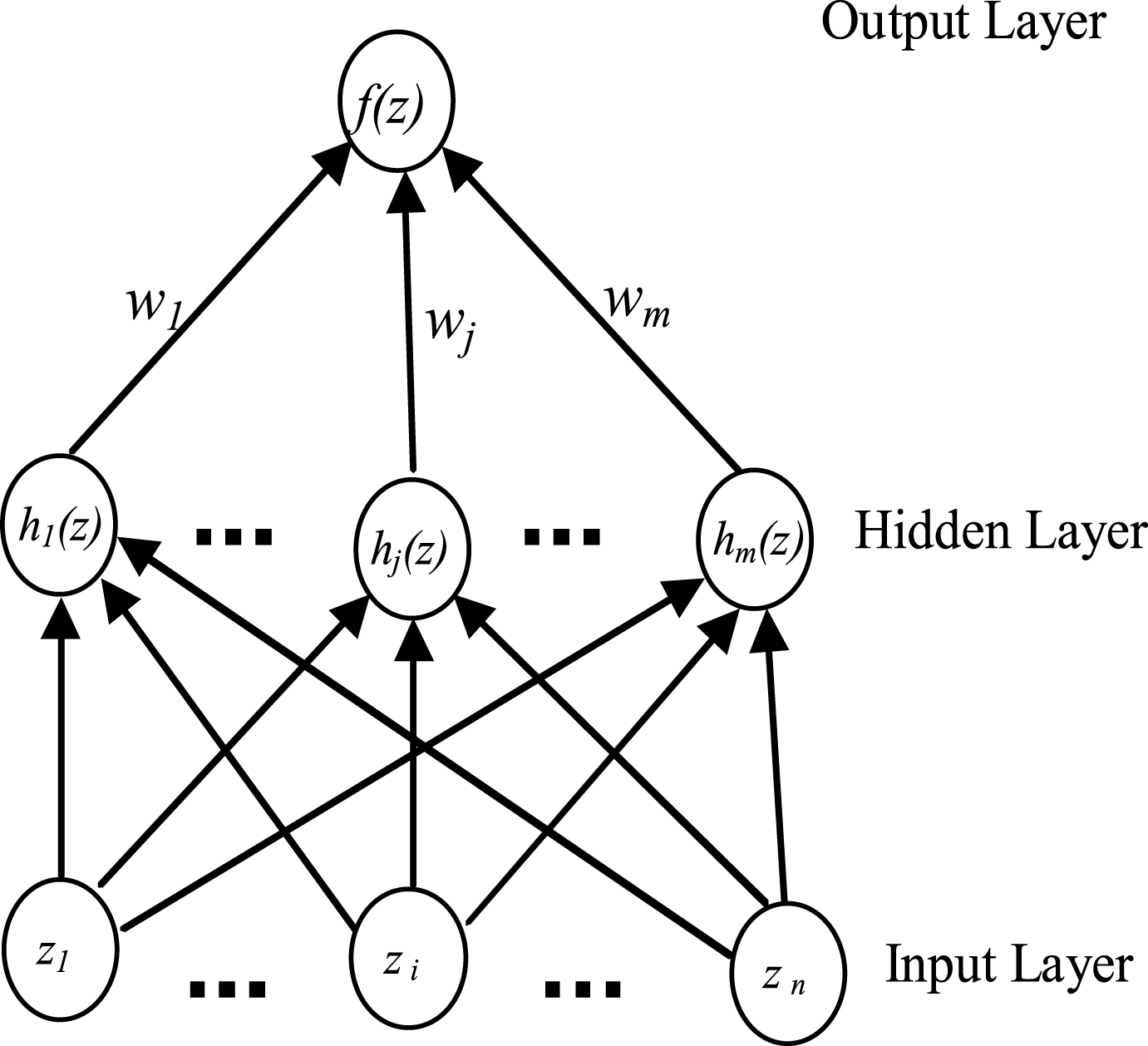
RBF Network.
The Gaussian function can be defined as:
The control strategy in this work is based on two controllers, a kinematic controller and a dynamic controller whose objective is to put the robot following its reference trajectory in presence of disturbances. A neural controller is chosen to approximate the function f.
The Fig. 3 resumes this control strategy.
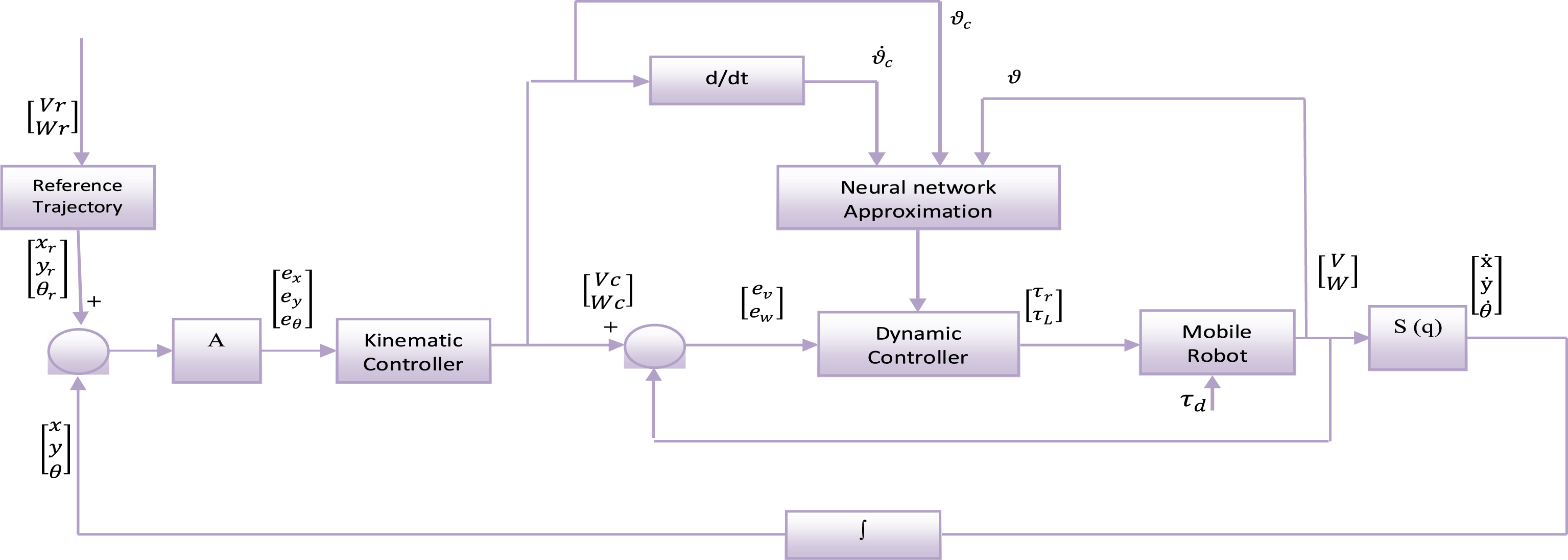
Control strategy diagram.
The kinematic controller is based on fast Terminal sliding mode control and permit to obtain the adequate velocities for an eventual stability in a finite time. The convergent characteristic of fast terminal sliding mode control is superior to that of the normal sliding mode control.
A kind of fast terminal sliding surface is proposed as follows:
Where x ∈ R is the state and α > 0.
The reaching time of the sliding surface to zero is defined as:
The global fast sliding surface is selected as:
Where α, β > 0 and q, p (q < p) are positives odd numbers.
According to Equation (7):
The sliding surface is selected as:
Then Equation (24) can be rewritten as:
The control law can be obtained as:
The derivate of the Lyapunov function is:
Such that p > 0 and q > 0 are odd integers, α1 > 0 and β1 > 0, then:
Notice that when θ
e
converges to 0, then ω
r
= ω
c
. Another two state control design are considered in this time:
The switching function can be designed as follows:
By designing sliding mode control law that s2 → 0, the state x e converges to y e in order to achieve x e → 0 and y e → 0.
Using the terminal sliding mode control:
Using Equations (30 and 31) and the derivative of Equation (32), the above result is obtained:
Then, the forward velocity control law can be obtained as:
In this section two cases of dynamic controller are considered. The first case in absence of disturbances, then GFSM controller is introduced.
In the second case when the disturbances are introduced, the NN-GFSM is applied.
Control without disturbances
In the case of absence of disturbances, Equation (13) becomes:
The velocities error is defined as:
The derivative of (37) is obtained as follow:
According to Equations (36, 38) becomes:
The nonlinear function is defined as:
With
Replacing (40) in (39):
Then, to obtain the control law, a sliding surface is choosing:
According to the Equations (23, 42, 43) is established.
Replacing Equations (41 in 43):
The obtained control law is:
Such that:
In this case, the neural network controller is introduced.
The Equation (41) is defined as:
The control law designed in Equation (45) becomes:
Where
RBF network can be adopted to approximate f (z). The desired algorithm of RBF network is:
Replacing Equations (47 in 48).
When
The output of the network is given as:
Selecting
Therefore:
The control law designed in Equation (48) becomes:
Where ξ is the robust element introduced to eliminate the network approximation error ɛ and the disturbances τd.
Replacing Equations (52 in 54):
Putting:
Replacing Equations (54 in 55):
The robust element ξ is designed as:
Where: ∥ɛ ∥ ≤ ɛ N , ∥τ d ∥ ≤ b d
The candidate function of Lyapunov is selected as:
The derivative of the Lyapunov function is defined as:
From Equation (56):
Selecting
The adaptive rule of network is:
Therefore:
Considering the term:
Such that matrix Mh is defined positive, β3 and α3 are positives, therefore:
In this section the simulations are subdivided in two parts. Firstly, the GFSM dynamic controller is proposed, in the second part the NN-GFSM is introduced in order to deal the distrubances. The simulation using matlab/simulink is applied on the mobile robot system.
Let us consider a circular trajectory with: v r = 1m/s, ω r = 1 rad/s.
The disturbances τd = [0.1 . sin(t) 0.1 . cos(t)].
The matrices values of the dynamic model are taken from [4].
The circular trajectory is considered with the following values:
α1= 4, β1= 1, p1= 7, q1= 5, α2= 0.5, β2= 2, p2= 7, q2= 5. α3= 1, β3= 2, p3= 7, q3= 5. ɛN = 0.2, bd = 0.1.
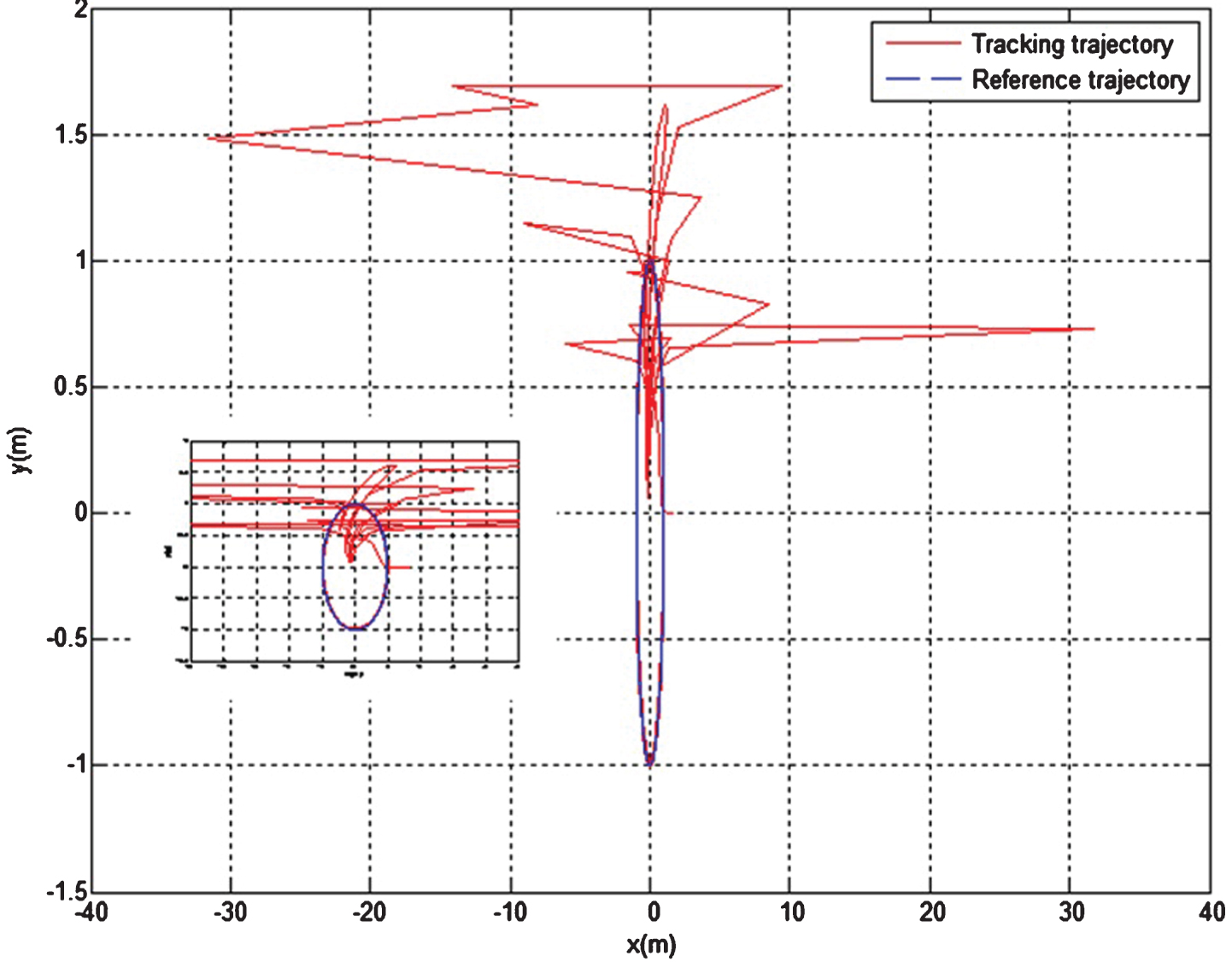
Figure 4 shows that the mobile robot diverges from the reference trajectory in the presence of disturbances. Therefore, the GFSM control stabilizes the system in finite time in the absence of disturbances, but cannot stabilize it in presence of disturbances.
GFSM circular trajectory tracking.
Figures 5 and 6 show that actual linear and angular velocities of the proposed control could not keep up with the desired ones in presence of distrubances, therefore the tracking is degraded when the distrubances are appeared.

GFSM linear velocities.

GFSM angular velocities.
Figure 7 shows the control torques obtained in presence of distrubances.
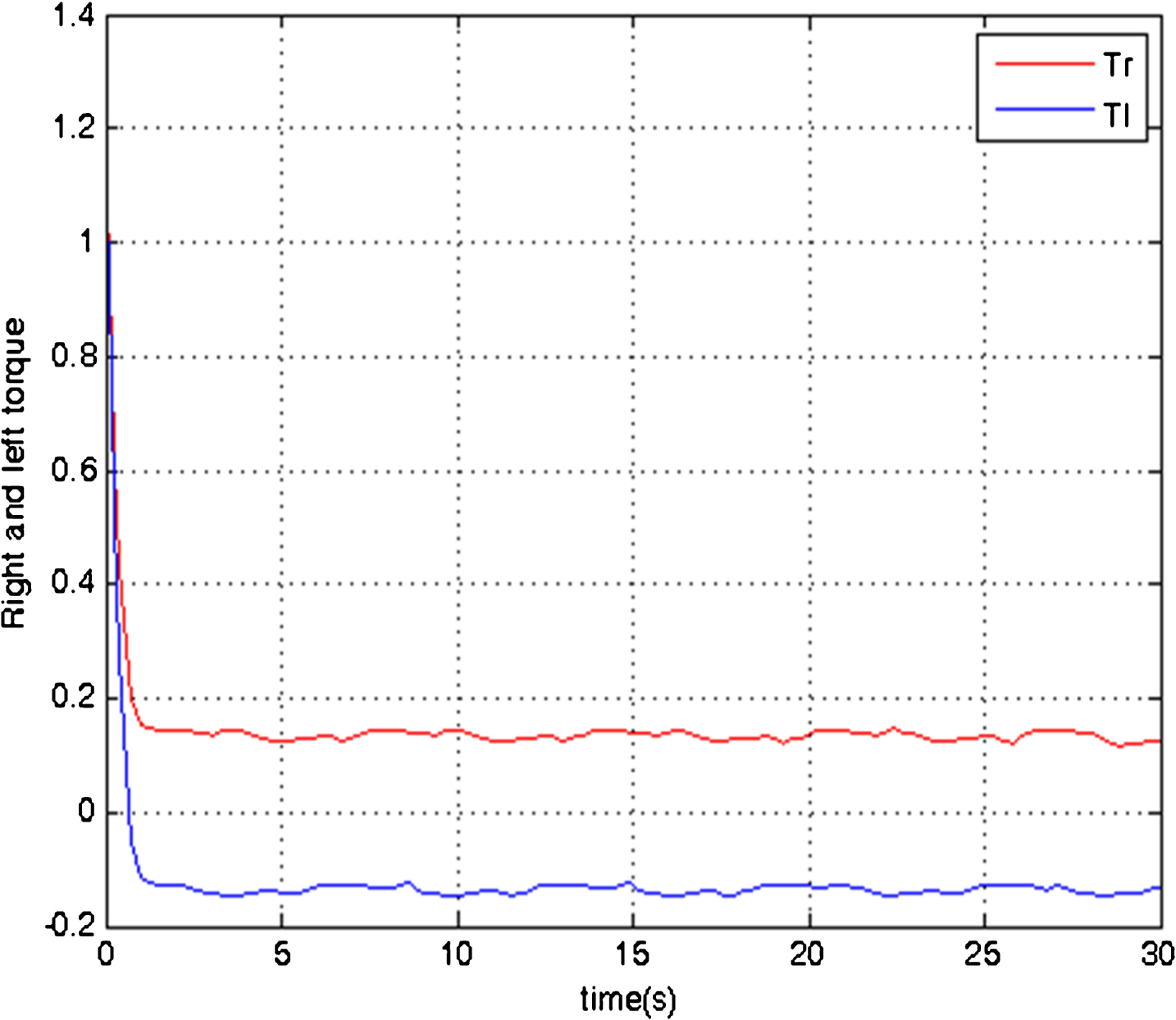
GFSM control inputs torques.
In the second part of simulation a NN-GFSM controller is introduced to deal the distrubances.
The circular trajectory is considered with the following values: α1= 4, β1= 1, p1= 7, q1= 5, α2= 0.5, β2= 2, p2= 7, q2= 5, α3= 1, β3= 2, p3= 7, q3= 5. ɛ N = 0.2, bd = 0.1.
The neural network is chosen with seven hidden, the initial weight matrix is selected as 0.1. b = 10.
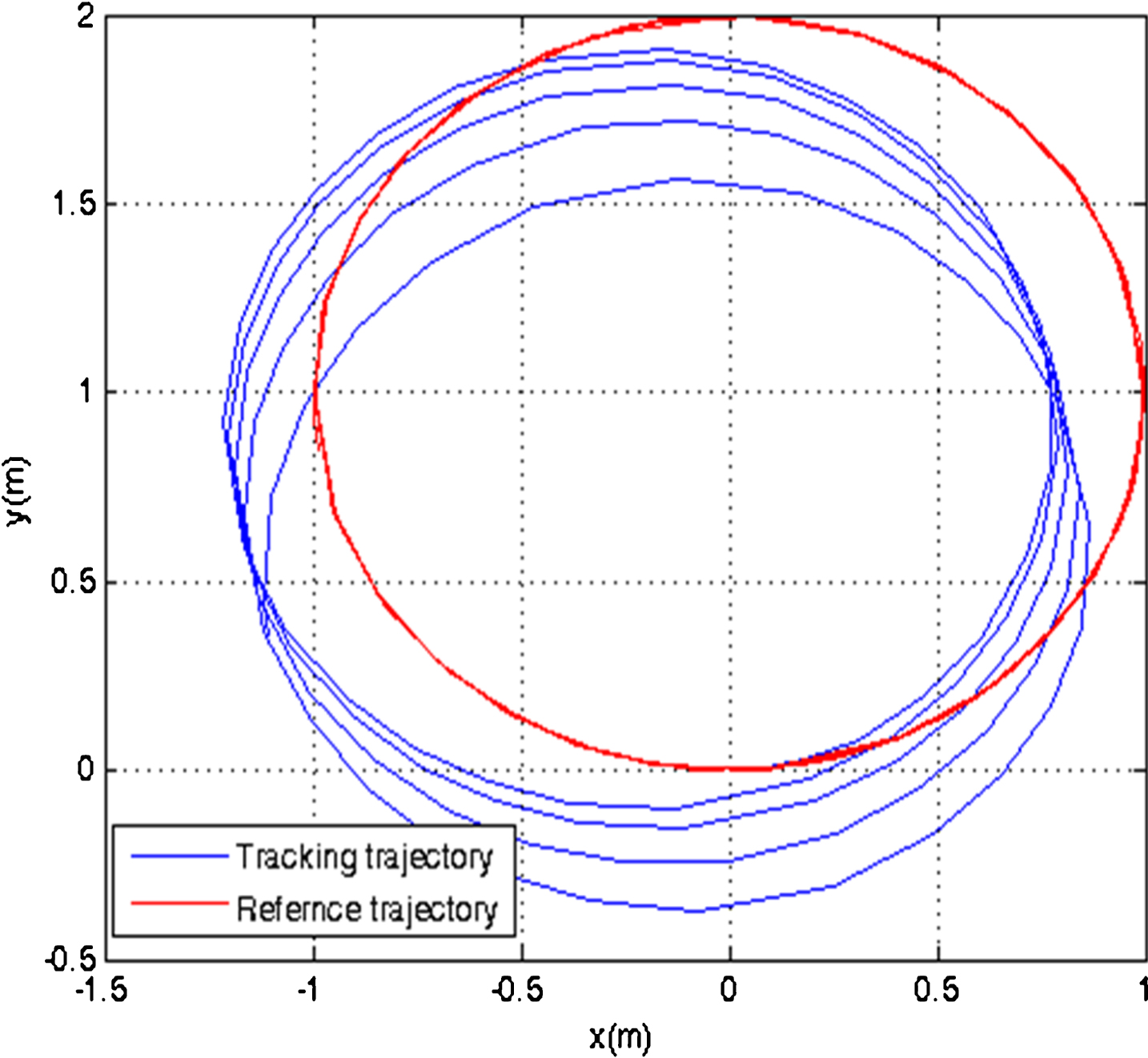
Figure 8 shows the circular tracking trajectory with NN-GFSM control, the tracking trajectory diverges from the reference in first time, but it tracks the reference after a finite time. When the NN-FGSM tracking results compared with the precedent results, it is clear that the performance of the system has been improved with respect to the previous cases.
NN-GFSM circular tracking trajectory.
Figure 9 shows that the tracking errors converge to zero in finite time.

NN-GFSM tracking errors.
Figures 10 and 11 show the actual forward and angular velocities respectively of the NN-GFSM could keep up the desired ones in presence of disturbances. Figure 12 represents the control input torques. Figure 13 shows the estimated function of the non linear function.

NN-GFSM linear velocities.

NN-GFSM angular velocities.

NN-GFSM control inputs torques.

Non linear function and estimated function.
In this paper a NN-GFSM control is proposed to ensure the trajectory tracking of mobile robot, taking into account the dynamics of the robot.The proposed controller NN-GFSM reduces the errors and makes the system converges to the reference in a finite time. The NN controller stabilizes the velocities errors, deal the disturbances and approximate the nonlinear function.
Simulations results have demonstrated that the NN-GFSM controller is efficiency and gives the best performances in comparison with GFSM in presence of disturbances.