
Abstract
In view of the fact that independent gesture recognition cannot fully meet the natural, convenient and effective needs of actual human-computer interaction, this paper analyzes the current research status of gesture recognition based on EMG signal, and considers the practical application value of EMG signal processing in prosthetic limb control, mobile device manipulation and sign language recognition. Therefore, in this paper, the particle swarm optimization (PSO) algorithm is used to optimize the center value and the width value of the radial basis function in the RBF neural network. And the author uses the EMG signal acquisition device and the electrode sleeve to collect the four-channel continuous EMG signals generated by eight consecutive gestures. Then, the author performs noise reduction and active segment detection based on the summation, and extracts the well-known 5 time domain features. Finally, the data obtained are normalized and divided into training set and test set to train and test the classifier. Simulation experiments show that the RBF neural network which optimizes the center value and width value of radial basis functions via particle swarm optimization algorithm achieves a high recognition rate in continuous gesture recognition.
Introduction
Independent gesture recognition requires hand to be relaxed after one gesture motion is made, and then the next gesture can be performed [1, 2]. However, in real life, whether it is communication, work or life through sign language, in most cases, people usually uses continuous gestures, so the identification of this independent gesture pattern has been difficult to meet the increasing demand of existing social intelligence [3]. For this reason, the actual natural gesture recognition based on the EMG signal is intended to provide a more natural, convenient and effective method for human-computer interaction, which provides higher application value for the intelligent control of artificial limbs, game entertainment and sign language recognition [4–7]. As an important bioelectrical signal, surface EMG signal has a wide range of applications in bionics, biofeedback, sports medicine and rehabilitation engineering [8]. In particular, in recent years, gesture recognition based on surface EMG signals has been applied to the research of electromechanical prostheses and auxiliary devices as control signals for human-computer interaction. Some of the researchers [9–11] have applied gesture recognition based on surface EMG signals to manipulator manipulation, human-machine interface and gesture recognition of fused images, all of which have achieved good results. However, most researchers [12–14] currently still focus on EMG signal processing based on independent gestures, strictly following the pattern of movement, relaxation and movement. Although the EMG signal using this gesture mode achieves a high recognition rate, it is difficult to meet the needs of continuous gesture recognition. Of course, some researchers [4, 15–17] have also studied the analysis of continuous gestures based on surface EMG signals. The main method is to first calculate the short-term energy characteristics of the signal based on the time window, and then match with the standard motion template to distinguish the motion, or identify the gesture motion based on the empirical formula without detecting the active segment, and both of them have achieved a certain recognition rate. Yet in the above method the size of the time window and the threshold selection of the presence or absence of defined motions still have no theoretical guidance, and there are certain drawbacks, so this paper has made some improvements.
Therefore, in summary, this paper focuses on two main problems in identifying continuous EMG signals: motion segment extraction and classifier design, and carries out detailed research. First, the author performs the necessary pre-processing on the raw EMG signal collected from the forearm of the human body. Then the author calculates the sum of the likelihood ratios of the signal samples, and extracts the active segments of the continuous action EMG signal by comparing the peaks of the sum of the points. Finally, the author combines the five time domain electromyography features extracted in this paper, trains and tests the RBF neural network classification optimized by PSO algorithm, and verifies the effectiveness of the continuous hand motion recognition process proposed in this paper.
The rest of the paper is organized as follows. Section 2 mainly introduces the research work related to this topic; Section 3 mainly introduces the equipment used by the author to collect the EMG signals, as well as the pre-processing methods for the original EMG signals; Section 4 mainly introduces the method of segmentation of motion segments of EMG signals in continuous gestures, and introduces five time-domain EMG features extracted in this paper. Section 5 firstly describes the method of optimizing the RBF neural network classifier by using PSO, and then combining the 5 time-domain EMG features extracted from the raw EMG signal to train and test the classifier for verifying the effectiveness of the method. The last section provides a concise summary of the full text work and suggestions for future work.
Related work
A multi-channel signal segment with hand motion is referred to as a motion segment. Although the EMG signals generated by continuous hand movements do not have a clear rest segment, when the hand movement switches from one gesture to another, the corresponding muscles relax for a short time [18]. Although this period of time is very short, the amplitude of the myoelectric signal is temporarily very low at this time [19]. Therefore, for the EMG signals generated by continuous hand movements, the strength of the EMG signal helps determine the start and end points of the active segment.
Lin et al. [20] in 2014 proposed a two-class classifier approach. It uses a classifier to distinguish the segmentation points of the gesture motion, and can mark the data in the continuous motion of the patient as the active segment and the inactive segment. By applying this technique to 20 healthy subjects who underwent lower body rehabilitation training, then achieved an 82% segmentation accuracy.
And in recent years, Gupta et al. [16] in 2016 proposed a continuous gesture recognition technology based on three-axis accelerometer and gyro sensor of smart device. The technology develops an automatic gesture recognition algorithm to detect the start and end points of the gesture motion segment, and finally recognizes the gesture by comparing the gesture code with the gesture database using a dynamic time warping (DTW) algorithm. Experimental results show the effectiveness of the continuous recognition technique. Lopes et al. [15] in 2017proposed a gesture segmentation method. The method uses an inertial measurement unit (IMU) and an electromyography (EMG) sensor to distinguish between dynamic gesture and static gestures.
At the same time, it is well known that neural networks have large-scale parallel distributed processing, distributed storage of information, strong robustness, associative memory, and self-learning, self-organizing and adaptive capabilities, so it is suitable for gesture recognition used in EMG-based signals [21–23, 25].
Hamedi et al. [26] in 2014 compared the application of multilayer perceptron (MLP) and radial basis function (RBF) neural networks in facial gesture recognition systems. The simulation results are combined with three characteristics. The results show that MLP has a higher recognition rate for most features, while RBF has a faster recognition rate.
And in recent years, Raj et al. [27] in 2016 used two artificial neural network models (MLPNN and RBFNN) to identify human forearm motion in real time based on surface EMG signals. The experimental results still show that MLP has a higher recognition rate for most features, while RBF has a faster recognition rate. Koçer et al. [28] in 2017 used MLP and RBF neural networks to compare the autoregressive and cepstrum representations of EMG signals in order to study the effectiveness of autoregressive and cepstrum analysis in diagnostic evaluation of EMG signals obtained from normal subjects and patients with myopathy. The experimental results show that compared with RBF, MLP is often used as a classifier because of its relatively high recognition rate.
Finally, studies [29–32] have shown that the simplest machine learning machine-quantum perceptron can be constructed by utilizing the basic properties of Hilbert space, quantum mechanics and the superposition principle of quantum measurements. Among them, the quantum neural network combining the basic knowledge of artificial neural network and the quantum computing paradigm is obviously superior to the traditional neural network, which has more powerful quantum computing ability, higher stability and reliability. And the speed of processing information is also significantly faster than most traditional neural networks. Although the powerful functions of quantum computing in neural networks may bring artificial intelligence to a new level, the current research in this field still needs further development by researchers [33–36].
Collection and preprocessing of surface EMG signals
EMG signal acquisition equipment
In the experiment of collecting myoelectric signals, this paper uses ELONXI electromyography research version C2 type EMG signal acquisition instrument produced by Hangzhou Jiaopu Technology Co., Ltd. The instrument provides users with four working modes: 16 channels, 1 kHz, 12 Bits. 8 channels, 1 kHz, 24 Bits. 2 channels, 2 kHz, 24 Bits. Electrode sleeve. Among them, “16 channels, 1 kHz, 12 Bits” and “electrode sleeve” provide the lowest effective voltage of 5 ADC samples (0.36μV, 0.72μV, 1.43μV, 2.86μV, 5.72μV). And the larger the theoretically selected value, the stronger the anti-noise performance, that is, the stability is enhanced, but the accuracy is correspondingly reduced. In order to obtain the surface electromyogram signal with suitable stability and accuracy, the sampling voltage of 1.43μV and the working mode of electrode sleeve are selected. The sampling frequency is 1000 Hz. The acquisition equipment is also equipped with a set of signal acquisition and processing software MyoAnalytics 2.0, which can be used for on-line data acquisition and off-line data analysis. In this experiment, the author only used one EMG main equipment, one HD connection line, one electrode sleeve and one computer. The acquisition device is shown in Fig. 1.

Electromyographic signal acquisition instrument.
After consulting the relevant literature and information, this paper chooses eight common arm movements to study: Flexion of Wrist (FLWR), Extension of Wrist (EXWR), Hand Grasp (HDGP), Extension of Palm (EXPM), Extension of Thumb (EXTF), Gesture V (GESV), Gesture Eight (GEET), Gesture OK (GEOK). The continuous surface electromyography signals of the eight continuous arm motion modes are extracted separately [37], and then the original signals are pretreated by the signal acquisition and processing software matched with the signal extraction equipment [38]. Eight gesture modes and sleeve wearing are shown in Fig. 2.

Eight kinds of gesture movements.
In the experiment, we conducted a data collection experiment on 5 healthy subjects (4 males, 1 female, aged between 20–25). The four subjects performed 50 sets of the above eight motions in sequence, for a total of 250 groups. The duration of each set of data is 10 seconds. In order to ensure that the two motions are as natural and coherent as possible, there is no time limit for one motion, and only the eight motions made by the subject are as coherent as possible. In order to eliminate the effects of muscle fatigue on signal acquisition, take a break for each set of motions. At the same time, considering the increase in the number of channels for collecting EMG signals in the information acquisition phase, the recognition accuracy of classification can be improved. And through experiments, it can be known that using the four channels can achieve the highest recognition rate, and then increasing the acquisition channel cannot significantly improve the accuracy of recognition, and may even reduce the accuracy [39], so each motion only extracts the electromyogram signal of four channels.
Surface electromyography (SMG) is a weak electrical signal produced by muscle fibers on the skin surface when skeletal muscles contract. In general, the EMG signal amplitude of human skin is about 10 μV∼5 mV, and the energy mainly concentrates between 10 Hz∼500 Hz. The signal is weak, so it is easy to be disturbed by noise, power frequency interference and background noise in electronic components. Therefore, the original EMG signal collected by the sleeve needs to be filtered by the matching signal processing software. In this paper, the author chooses spatial filtering to denoise and filter out the noise outside the effective frequency band of the EMG signal [40].
Feature selection of surface EMG signals
Accumulation and its application in signal segmentation
Compared with the traditional independent gesture signal waveform diagram, the difficulty of continuous gesture recognition is that there is no rest motion between the gestures, so the critical range of the motion gesture and the rest gesture cannot be visually recognized, and thus the starting point of the gesture motion cannot be directly obtained, so that the analysis of the extracted features causes some confusion [20]. Therefore, the traditional static independent gesture signal recognition method is no longer suitable for the electromyogram signal generated by the continuous gesture motion. The existing continuous signal active segment segmentation method mainly distinguishes the motion by calculating and comparing the matching degree of the short-time energy feature of the EMG signal based on the time window with the standard motion template, or based on the empirical formula, the gesture motion is recognized without the detection of the active segment, and all have obtained a certain recognition rate [15, 16]. However, in this method, the width of the time window usually needs to be manually set, and there is no theoretical guidance. If the setting is improper, the segmentation efficiency is reduced or the signal is lost. The selection of the threshold for defining the presence or absence of the motion also has no theoretical guidance, so there are certain drawbacks about them. Therefore, this paper proposes a motion segmentation method to improve the drawbacks of the above algorithm.
Some studies [41, 42] have shown that the generalized likelihood ratio is often used in signal recognition without hypothetical statistical parameters, and the concept of generalized likelihood ratio is applied to the wavelet transform to dynamically detect the signal. Therefore, the basic principle of the segmentation method is: because during the process of continuous motion, the signal generated by the muscle motion is different from the signal produced by the signal generated when the muscle is static. Considering this practical situation, many signal detection methods can be applied to continuous motion of EMG signal segmentation by detecting signal characteristics [15]. Therefore, when selecting the characteristic parameters of the signal, both the simplicity of the calculation and the accuracy of the detection motion should be considered. The amplitude of the signal is undoubtedly the most direct reflection of the physical meaning of the signal. The stronger the signal, the larger the amplitude [18]. Therefore, the amplitude of the signal can be used to detect changes in the biological signal, thereby determining the beginning and end of the gesture, and realizing the segmentation of the continuous gesture.
The accumulative sum of dynamic signals segmentation method is directed to: when the motion occurs, the accumulation of the signal amplitude is correspondingly represented as a minimum value, and when the motion ends, the accumulation of the signal amplitude is correspondingly represented as a maximum value. So the purpose of the splitting motion can be achieved by judging the accumulated value of the signal amplitude. For the following signals:
Among them, K represents the number of sampling points before and after the current time t, P (i) is the likelihood ratio, f (t - K + i) and f (t + i) represent the eigenvalues of corresponding signals at t - K + i and t + i, respectively. Since the sampling frequency of this paper is 1000Hz and the average motion is one second, the K value here is 750.
Since the EMG signal is an unsteady random process, but in a relatively short period of time, the analysis of the EMG signal can be approximated as an analysis of the steady state signal [43]. The methods for feature extraction of myoelectric signals include time domain analysis, frequency domain analysis, time-frequency analysis or parametric model analysis [44]. Considering the time domain features, the method is simple, the physical meaning is direct, the separability is strong, and the calculation speed is fast. Due to the other feature extraction methods consume more computational resources, and combined with the practical application effect and low computational complexity, so this paper adopts some feature extraction methods of the time domains. In this paper, five common time domain feature extraction methods with good separability of motion are selected: Mean Absolute Value, Zero Crossing, Root Mean Square, Waveform Length and Slope Sign Change.
(1) Mean Absolute Value (MAV)
This feature is the most common one in the analysis of surface electromyography signals, which is similar to the IEMG feature used to establish the index [44]. The MAV feature is the mean of the absolute magnitude of EMG signal in the data window, which is defined as:
x i indicates the magnitude of EMG signals at i sampling points, and K indicates how many sampling points EMG signals have been extracted in a signal window.
(2) Zero Crossing (ZC)
This feature measures the number of EMG signal crossing zero amplitude level, which is related to the size of muscle productivity [44]. To avoid the influence of low voltage fluctuation and background noise on the value, the feature added threshold condition, which is defined as:
(3) Root Mean Square (RMS)
RMS can be used to measure the power of the EMG signal, while RMS can also represent the energy of the signal, with a clear physical meaning [44]. This feature is defined as:
(4) Waveform Length (WL)
In the process of signal change, the sum of amplitude changes between adjacent data indicates the degree of signal change in amplitude [44]. This feature is defined as:
(5) Slope Sign Change (SSC)
The number of changes of slope symbols counts the number of changes of data symbols in the signal sequence [44]. This feature is defined as:
Before inputting the feature set to the neural network, in order to improve the effect of network parameter initialization and learning rate, the input vector will be normalized.
The classifier design is the core part of the pattern recognition task implementation. The purpose is to establish a classification model for identifying signal features in order to accurately determine the category to which the signal features belong [45, 58]. In the ANN model, the radial basis function neural network has the advantages of less computation, simple structure, strong parameter approximation ability and fast learning speed. Therefore, the RBF neural network is used to study the EMG signal. At the same time, the particle swarm optimization algorithm has the advantages of fast convergence, less easy to fall into local optimum and strong generalization ability [47–51]. It is proposed to use PSO to train RBF neural network to optimize the center value and width value of the network.
Particle Swarm Optimization
First the PSO algorithm initializes a group of particles in the feasible solution space. Among them, each particle represents a potential optimal solution to the extreme value optimization problem, and the particle characteristics are represented by three indicators: position, velocity and fitness value [48, 59]. The particles move in the solution space and update the individual position by tracking the individual extremum Pbest and the population extremum Gbest. The individual extremum Pbest refers to the optimal position of the fitness value calculated in the position experienced by the individual; and the group extremum Gbest refers to the optimal position of the fitness searched by all the particles in the population. Each time the particle is updated, the fitness value is calculated once, and the individual extreme value and the population extreme value position are updated by comparing the fitness value of the new particle with the fitness value of the individual extreme value and the population extreme value [52, 53]. Therefore, the core idea of the algorithm is to update the velocity and position of the particle by tracking the current local optimal solution and the global optimal solution. When the termination condition is reached, the current global optimal solution is the optimal solution to the problem. The particle update formula is as follows:
In the formula,
In the formula, ωmax, ωmin is expressed as the maximum and minimum weighting coefficients respectively, and in this paper, we take ωmax = 0.9, ωmin = 0.4, at this time, the performance of the algorithm is optimal. D i , Dmax represents the number of iterations and the total number of iterations. At the same time, in order to prevent the blind search of particles, the speed of each particle needs to be limited to a certain range [-Vmax, Vmax], and in this paper, we take Vmax=1. When the speed of particle renewal exceeds the critical value, the current speed will take the critical value. The basic framework of the algorithm is shown in Fig. 3.
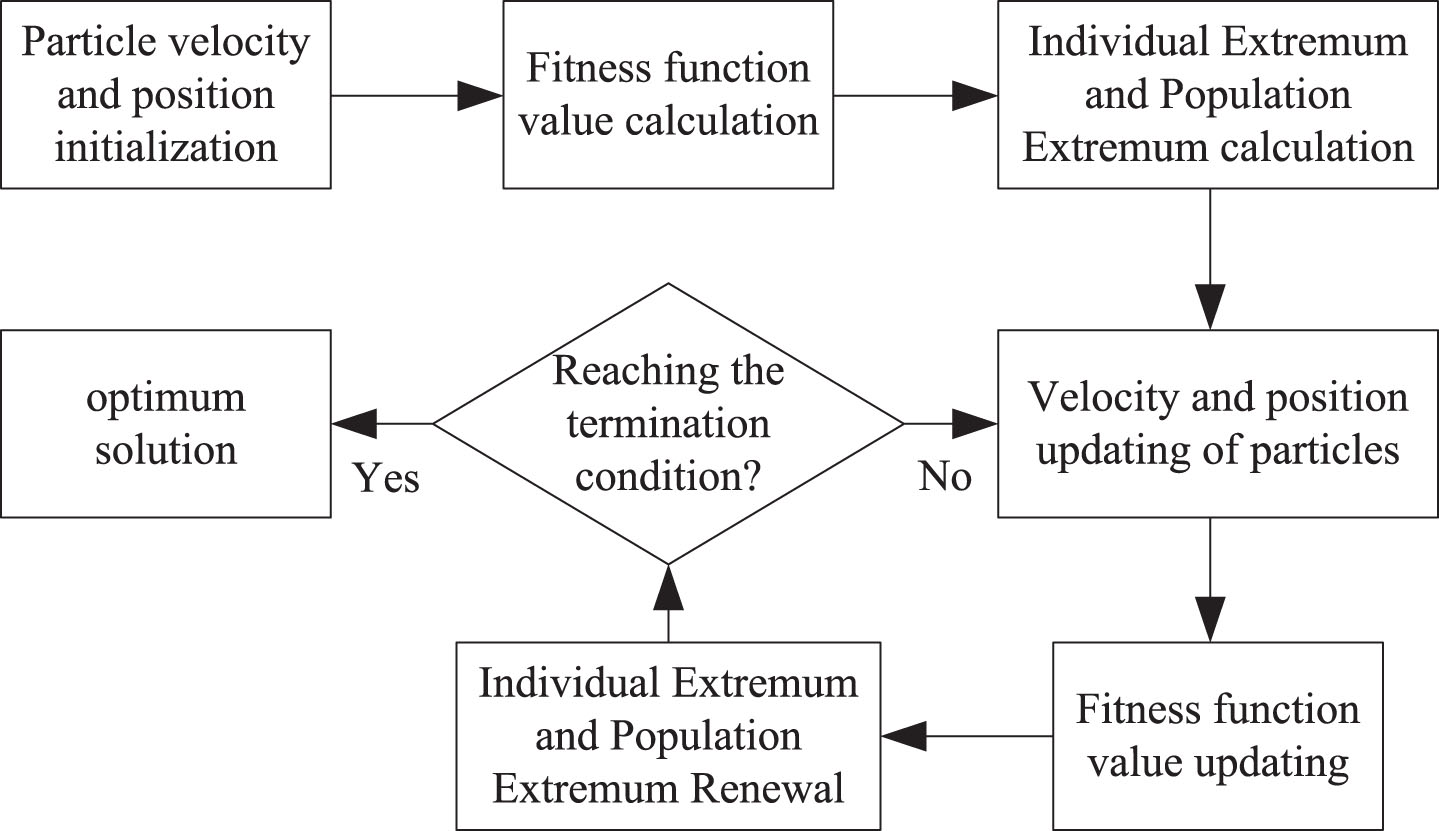
Basic flow chart of particle swarm optimization.
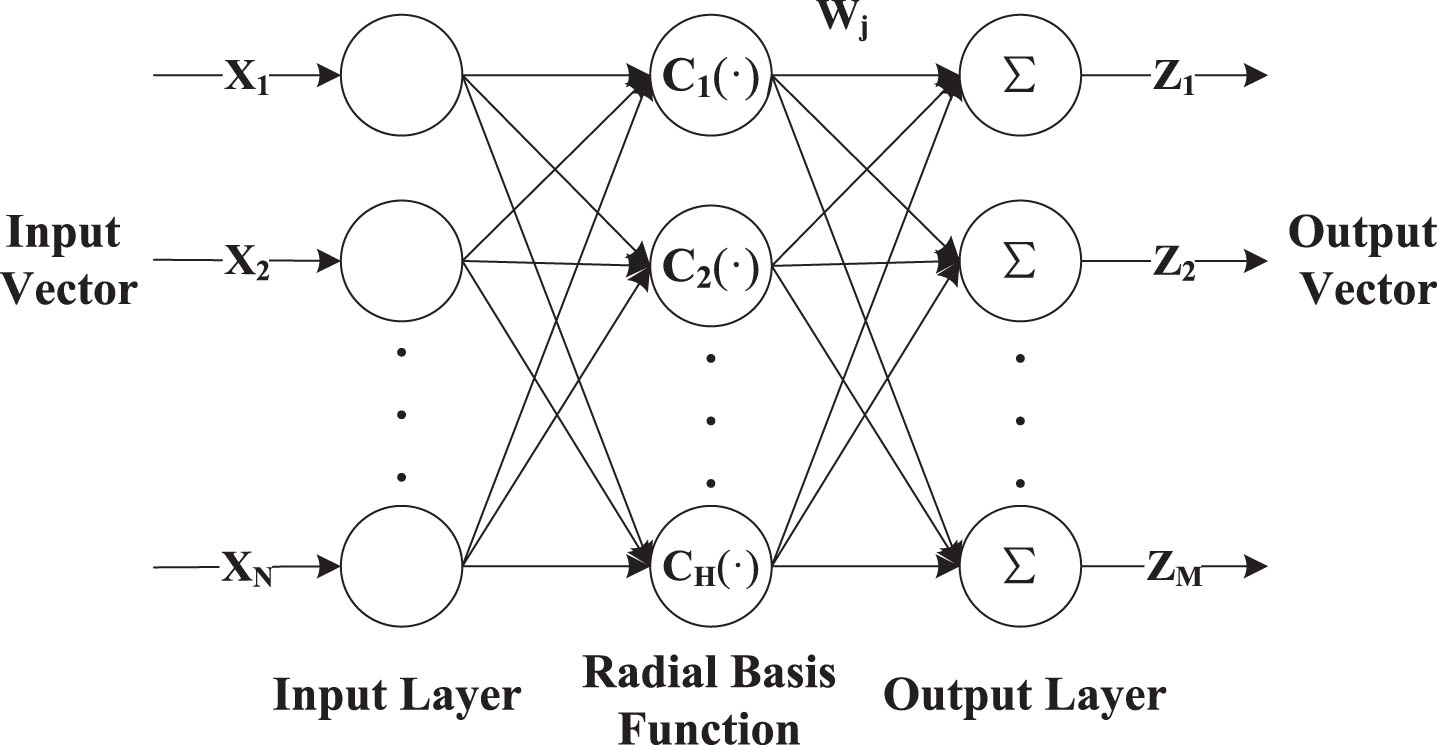
The RBF neural network has good adaptability to arbitrary nonlinear functions, and can analyze some difficult analytical rules in the system. It has good generalization and fast learning ability [21, 60]. RBF neural network is usually a three-layer feed-forward network whose topology is shown in Fig. 15. In this neural network, the hidden layer is the extraction of clustering features of input information. This non-linear transformation maps the input space into a new space, and the output layer is the linear combination of the output of the basis function in the new space [66–68]. Compared with the traditional BP neural network, RBF neural network has only one hidden layer, and has the characteristics of “local mapping”, so it has fast learning speed, can meet the application with real-time requirements and avoid local minimal problems [22, 61]. Because the hidden node of RBF neural network takes the distance between input mode and central vector as independent variable of function and uses radial basis function as activation function, the farther the input of neuron is from the center of radial basis function, the lower the activation degree of neuron is.
As can be seen from Fig. 4, the first layer of the network is the input layer, which consists of signal source nodes, in which the number of input nodes N is the dimension of input samples. The second layer is the hidden layer. The number of nodes in the hidden layer H needs to be determined according to different problems, and the activation function of each node is based on the radial basis function. The output of the h-th neuron in the hidden layer is:
Topology of RBF neural network.
In the formula, X is the training sample, c
h
, σ
h
is the center and width of the neuron in the h-th hidden layer, ∥• ∥ is the Euclidean distance, and φ (•) is the radial basis function. At present, radial basis function is divided into five functional modes [54, 62]: 1) standard Gauss RBF function; 2) abnormal S-type RBF function; 3) Cauchy RBF function; 4) Multi-Quadratic RBF function; 5) quasi-quadratic RBF function. Since the standard Guass function is mostly used in the radial basis function, and it is positive definite function in any dimension space and has unique solution, the standard Gauss RBF function is chosen as the activation function of hidden layer, then the concrete expression of hidden layer radial basis function is as follows:
In the formula, c h , σ h is respectively expressed as the center and width of the radial basis function of the h-th hidden layer. The larger σ is, the wider the width of the hidden layer neurons is, and the slower the attenuation of the radial basis function is. On the contrary, the smaller σ is, the narrower the width of the hidden layer neurons is, and the faster the attenuation of the radial basis function is, and the stronger the selectivity is.
Finally, the third layer is the output layer of the network structure, which responds to the output of the hidden layer. The layer maps the space of the hidden layer to the output layer, where the mapping function is a linear function. The output results of each layer of the hidden layer are linearly combined by connecting weights. The expression is asfollows:
In the formula, ωhm is the connection weight of the h-th first hidden layer node to the m-th first output node. RBF neural network is not connected with other feed-forward neural networks mainly in the hidden layer. The “base” of the hidden layer of the neural network usually uses radial basis function, so once the center of the radial basis function of the hidden layer node is determined, the output vector can be mapped to the hidden layer space without weight connection.
In summary, the training methods of hidden layer function center value c
h
and width value σ
h
, connection weight ω
hm
between hidden layer and output layer in RBF neural network have great influence on network performance. If the parameters are not selected properly, it will easily lead to poor generalization ability and large convergence error. In view of this, this paper combines the strong global convergence ability of PSO algorithm with the strong local approximation performance of RBF neural network, and uses PSO algorithm instead of the training algorithm of neural network to optimize the center value c
h
and the width value σ
h
of hidden layer function in neural network, while the connection weight ω
hm
of hidden layer and output layer is adjusted dynamically and adaptively. The position of each particle in the particle swarm optimization algorithm is R-dimensional vector, which consists of the parameters to be optimized in the radial basis function (RBF) neural network. That is to say, the size of R equals the number of parameters to be optimized. Particle swarm optimization (PSO) is the process of obtaining the optimal parameters of radial basis function (RBF) neural network, and its fitness function uses the mean square error (MSE) function which can reflect the performance of the function [56]. Its expression is as follows:
In the formula, Z
m
represents the m-th output value of the network,
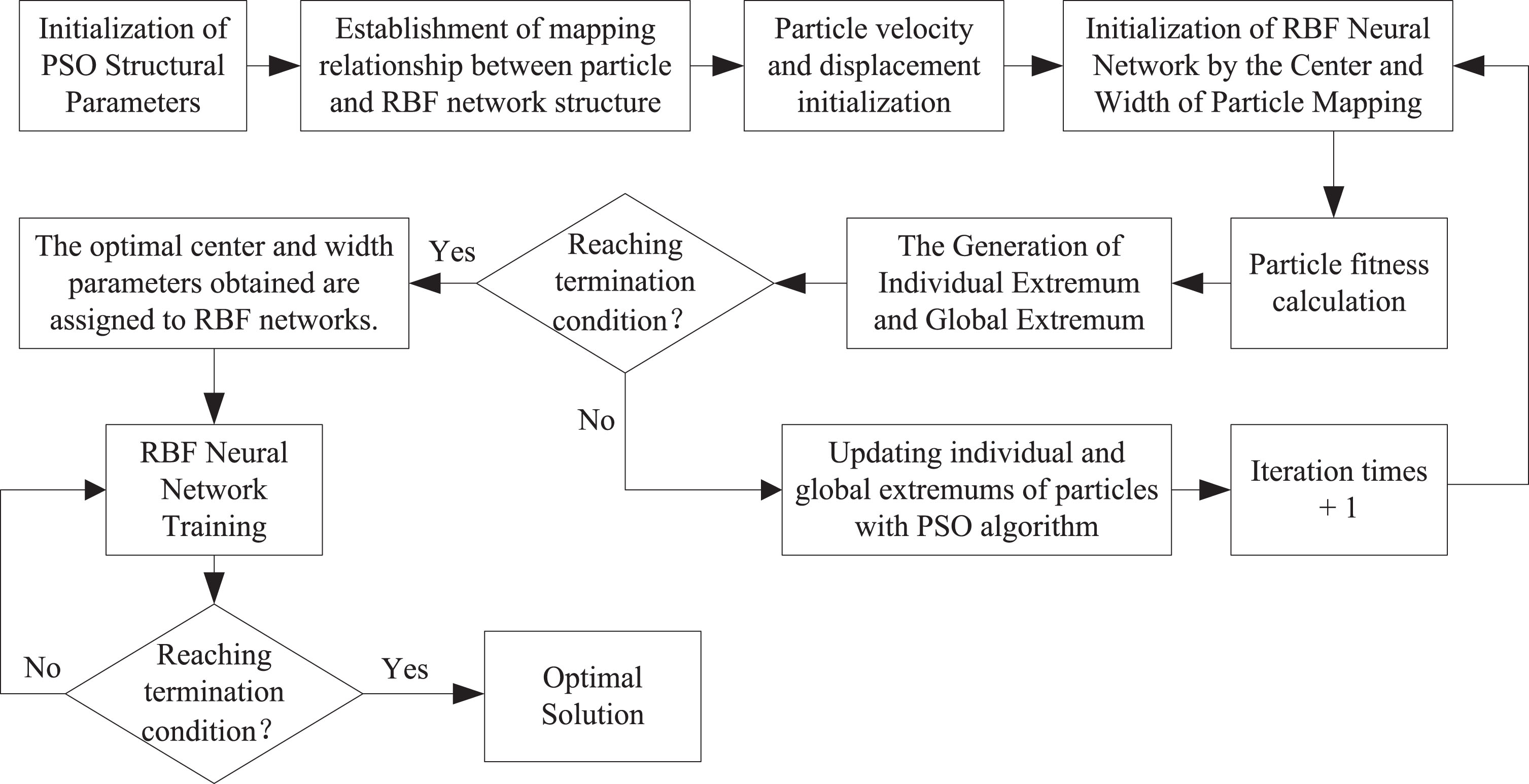
Iterative flow chart of PSO-RBF neural network algorithm.
The basic steps are as follows: Firstly, the population number S and population iteration number D of PSO are initialized, and the position and velocity of each particle in the population are randomly set. At the same time, the speed range is limited in [–Vmax, Vmax]. The algorithm is tested according to different standard test functions (Spherical function and Rastigrin function). The experimental data shows that with the increase of the number of populations, the classification accuracy of the algorithm increases, but the running time also increases significantly. When the maximum number of populations is 60, the number of iterations of the algorithm is gradually stable, but the running time will still increase with the number of populations. Therefore, the number of populations initially set in this paper is S=60, maximum number of iterations D max = 200, MSE min = 0.015. Secondly, the mapping relationship of structural parameters (c h , σ h ) of Particle Optimization RBF network is determined, and the structure of RBF neural network is constructed. Subsequently, the radial basis function (RBF) neural network is trained to calculate the fitness value of each particle by the fitness function defined and to judge its merits and demerits. Then, the fitness values are compared to determine whether it is necessary to update the individual extremum, the total extremum of the population, and the position and velocity of the particles until the iteration number reaches Dmax or the training error is less than MSEmin. Finally, the algorithm is finished and the optimal network structure model is output.
In this paper, the characteristics of each group extracted from electromyogram signals collected by electrode cuffs are divided into two parts. 200 groups are randomly selected from 250 sets of sample data as training samples and input into PSO-RBF neural network for training. Then 65 groups are randomly selected from 250 sets of sample data as testing samples to determine the accuracy of motion classification by PSO-RBF neural network. The eight kinds of motions we prepared: Flexion of Wrist (FLWR), Extension of Wrist (EXWR), Hand Grasp (HDGP), Extension of Palm (EXPM), Extension of Thumb (EXTF), Gesture V (GESV), Gesture Eight (GEET), Gesture OK (GEOK), are used as the target vector T = [a1, a2, …, a8] of pattern classifier. Among them, one and only one element in each target vector is equal to 1, while the other elements are 0. Finally, the four-channel five feature vectors extracted above are used to compose the pattern classifier’s 4 × 5 = 20-dimensional input vectors P= [MAV, ZC, RMS, WC, SSC].
As can be seen from the above, there are many hidden layer nodes in PSO-RBF neural network, and there are too few hidden layer nodes, so the network may not be able to solve the problem; and there are too many nodes, the network may only classify the training samples accurately. According to our experience, 15 neuron nodes are used in the hidden layer. Then the PSO-RBF neural network structure is composed of 20 input neurons, 15 hidden layer neurons and 8 output neurons. Finally, the change of mean square error with the number of iterations and running time is obtained by calculating the program code on the MATLAB platform as shown in Figs. 6 and 7.
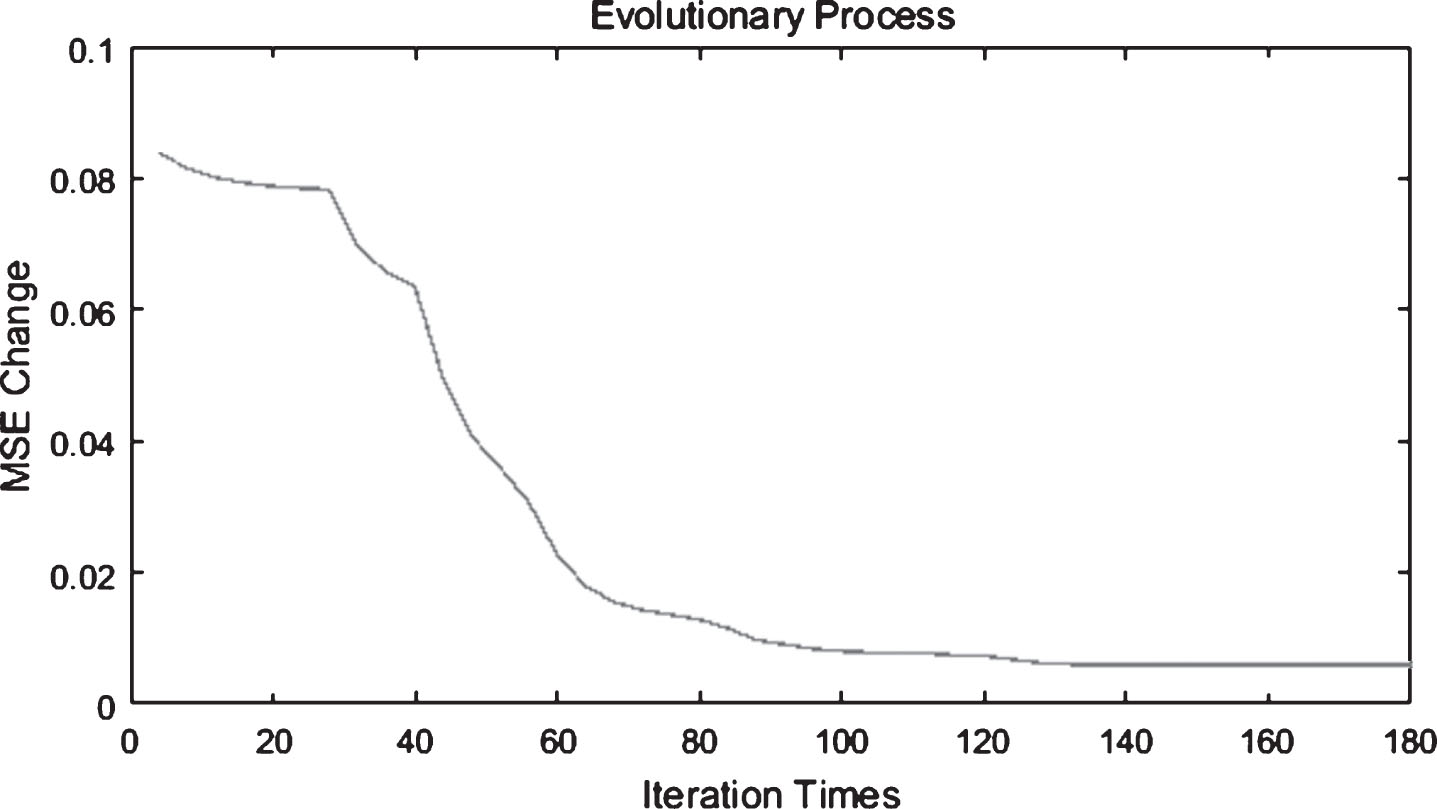
Variation of mean square error.
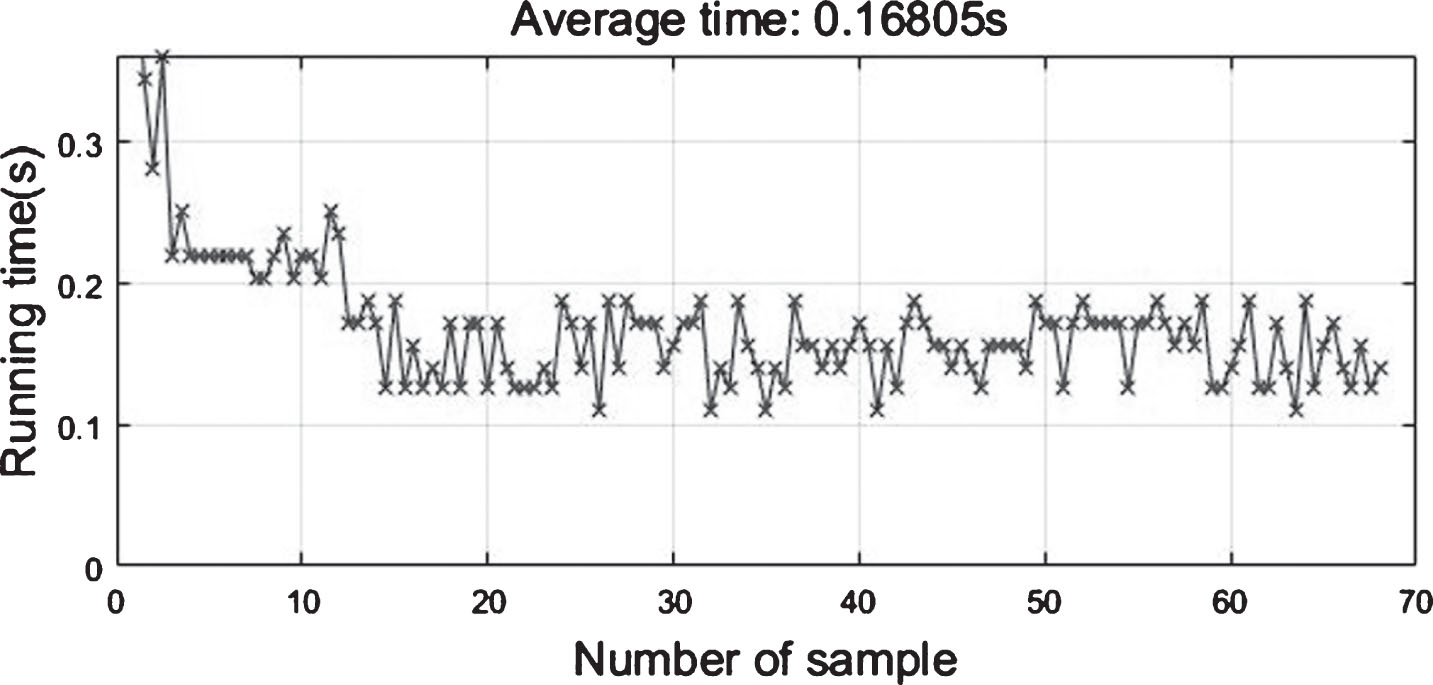
Run-time changes.
It is obvious from Fig. 6 that when the number of iterations approaches 135 times, the minimum mean square error of network test obtained by optimizing the center value c h and width value σ h of hidden layer function in RBF neural network is 0.014568. Subsequently, the randomly selected test set is imported into the classifier designed above to verify the feasibility of particle swarm optimization (PSO) algorithm applied to the recognition of EMG signals generated by continuous gesture movements in RBF neural networks. Finally, the results of recognition of continuous gesture motion patterns by classifiers based on PSO-RBF neural network are shown in Table 1.
Test set recognition results
From the data in Table 1, it can be seen that the recognition rate of individual gestures is not very ideal compared with other gestures, which may be due to the non-standard continuous gestures caused by individual differences or arm muscle group interference, etc. At the same time, the recognition rate of the continuous motion test set is lower than that of the existing independent gesture recognition rate, which may be caused by the recognition oscillation caused by the continuous motion change or the electrode shift caused by the motion amplitude too large. However, as far as the overall results are concerned, the recognition rate of optimizing RBF neural network with PSO algorithm is 1% ∼4% higher than that of using RBF neural network alone in classifier design to recognize continuous motion EMG signals, and good recognition results are achieved.
Aiming at the inefficiency of recognition in the current research of continuous gesture movement, this paper analyses the current research situation of most researchers in this field, starting with the extraction of continuous gesture signal, the segmentation of continuous EMG signal active segment, the extraction of signal time domain features, and the design of classifier based on PSO-RBFNN algorithm. Emphasis is placed on how to optimize the center value c h and width value σ h of hidden layer function of RBF neural network by particle swarm optimization, and then import the optimized center value c h and width value σ h into RBF neural network to design feature classifier, so as to solve the problem that traditional RBF neural network algorithm is easy to fall into local minimum and has low training speed in EMG signal recognition. Through the simulation test of the test set, the average recognition rate is 97.115%, and the average time is 0.168 seconds. The results show that the classifier has a good effect on the recognition of continuous gesture signals. It not only improves the self-learning performance of RBF neural network, but also improves the recognition rate of features, and provides reference for the design of gesture recognition classifier for surface EMG signals.
Footnotes
Acknowledgments
This work was supported by grants of National Natural Science Foundation of China (Grant Nos. 51575407, 51505349, 51575338, 51575412, 61733011); the Grants of National Defense Pre-Research Foundation of Wuhan University of Science and Technology (GF201705) and Open Fund of the Key Laboratory for Metallurgical Equipment and Control of Ministry of Education in Wuhan University of Science and Technology (2018B07).