We provide sufficient conditions for the existence, uniqueness and global Mittag–Leffler stability for the solutions of fractional difference model of bidirectional associative memory (BAM) neural networks. Before proceeding to the main results, we introduce the newly established discrete fractional calculus and expose some of its features. The techniques of Lyapunov function and Lyapunov direct method are then employed to prove the main results. We give two examples to verify and illustrate the theory.
Fractional differential equations (FDEs) are perceived as indisputable models to nonlinear differential equations. The researchers have recently assimilated that FDEs have widespread applications in various fields of science and engineering such as engineering optimization and pattern recognition. Furthermore, FDEs are employed in social science such as food supply, climate and economics. Thus, the study of these equations has been the object of considerable scrutiny during the last decades. Meanwhile, different definitions for the concepts of differentiation and integration have been proposed and used to prove the qualitative properties of solutions of FDEs using various methods and diverse approaches [1–6].
The discretization of FDEs is of great antecedence for scholars who are interested in numerical analysis. In alignment with the fact that not all discrete operators acquire similar features as of the continuous ones, the investigation of discrete analogue of fractional calculus has become crucial topic. Consequently, some researchers have taken the lead and established the study of discrete fractional calculus and subsequently reported significant results on fractional difference equations (FdEs) which are the discrete correspondent of FDEs; see for instance [7–12]. Nevertheless and upon exploring the literature, one can figure out that the study of FdEs has comparably gained less attention among researchers than FDEs.
Due to their effective descriptions for processes which involve infinite memory, FDEs have been incorporated to investigate the neural networks with transmission delays. It has been found that BAM neural networks are entirely history dependent biological models which can be adequately expressed using FDEs involving discrete or distributed delays. Moreover, researchers have figured out that the existence of the delays in the process has direct backlash on its stability attitude. This has been the motivation that encourages them to study the behavior of solutions of fractional–order BAM neural networks and examine how the delays affects the process [13–19].
The stability of FDEs has recently attracted increasing interest amongst scholars. In [20], Matignon was the first who analyzed the stability of linear FDEs with Caputo derivative. Since then, many papers have been published on the stability of linear and nonlinear FDEs [21–24]. Lyapunov’s methods provide an efficient tool for stability analysis for nonlinear differential equations. There are several stability assesments combined with Lyapunov’s approach in the literature [25]. In his remarkable paper [26], Podlubny et. al. extended the Lyapunov direct method to the case of FDEs and proposed the concept of Mittag–Leffler stability for these equations. Thereupon, many researchers have consolidated the Mittag–Leffler stability into fractional–order BAM neural networks and thus obtained many noticeable results in this regard [27–31]. Never the less, one can notice that all the results obtained in the above listed papers have been conducted for continuous fractional–order operators. To the best of authors’ noticing, however, the progress regarding the investigation of stability results for FdEs and fractional difference neural networks is hardly considered; see the recent papers in this regard [32–34].
As previously stated, it is evident that not all properties of continuous operators are forfeited by the discrete counterpart operators. For instance, the α rising function tα for continuous operators, which have the property tα + tβ = tα+β, does not hold true for discrete operators. That is, is not necessarily equal to . Motivated by the above discussion, the current authors find it imperative to investigate the following fractional difference system of BAM neural network.
where –the set of natural numbers including zero, 0 < α < 1 and c ∇ α denotes the Caputo fractional difference operator of order α. Here xi and yj denote the potential (or voltage) of the cell at time t of the i–th neuron and the j–th neuron, respectively; fj and gi are the non-linear activation functions; Ii and Jj denote the i–th and the j–th component of an external bias; the positive constants ci and dj denote the strengths at which the i–th and the j–th cell reset their potential to the resting state when isolated from the other cells as well as from external inputs; aij and bji denote the strength of connections and τ is the non-negative discrete constant denoting transmission delay.
The initial conditions combined with system (1) are defined as
where : the set of all bounded sequences defined on their domains. The investigation herein this paper are executed by using the nabla backward operator which stands in need to basic preparations on discrete backward fractional calculus.
The main goal of this work is to settle down sufficient conditions for the existence, uniqueness and global Mittag–Leffler stability of system (1)-(2). We will employ the newly defined discrete fractional calculus and implement the techniques of the Lyapunov function and Lyapunov direct method via discrete settings to prove the main results. We construct two examples to verify and illustrate the proposed theoretical findings.
Essential preliminaries
For completeness, we briefly state some basic definitions and essential lemmas on discrete fractional calculus. These preliminaries serve as imperative foundations before proving the main results. We refer the readers to [33, 36] for proofs and justifications in this section.
Let be the set of real numbers, the set of natural numbers and the set of natural numbers including zero. For any we define the α rising function as
where Γ (·) denotes the Gamma function, which satisfies Γ (α + 1) = αΓ (α). The nabla backward difference of x is given by
Definition 2.1. [35] Let the backward jump operator defined as ρ (s) = s - 1. Then for α ∈ (0, 1) , the Riemann–Liouville’s sum operator of x is defined as
Property 1.Forμ > -1, we have
Definition 2.2. [35] Let and ρ (s) = s - 1. Then for α ∈ (0, 1) , the Riemann–Liouville’s difference operator of x is defined as
Definition 2.3. [35] Let and ρ (s) = s - 1. Then for α ∈ (0, 1) , the Caputo’s difference operator of x is defined as;
Property 2. The Caputo’s difference of a constant function is zero.
Mittag–Leffler function is regularly employed in the theory of FDEs. Therefore, we recall herein its discrete fractional version.
Definition 2.4. [36] For , |λ|<1, and –the set of complex numbers, the discrete fractional Mittag–Leffler function with one parameter is defined as
The discrete fractional Mittag–Leffler function with two parameters is defined as
where and .
Definition 2.5. [36] Let f (t) be defined on . Then, the discrete Laplace transform of f is given by
Lemma 2.1. [36] Let f (t) be defined on and 0 < α ≤ 1. Then
The Laplace transforms of Mittag–Leffler functions are essential in proving the main results.
Lemma 2.2.[36]For 0 < α ≤ 1 and f (t) defined on we have
.
Lemma 2.3.[37]If the Laplace transforms of f (t) and g (t) are F (s) and G (s) respectively, thenthat iswhere ″ * ″ is called the convolution operator defined as
Consider the following delayed Caputo fractional order difference equation
Definition 2.6. The constant x* is an equilibrium point of equation (10) if and only if f (t, x*, x*) =0 for any .
Definition 2.7. The trivial solution (or zero solution) of equation (10) is said to be asymptotic stable, if there exists a real positive constant δ = δ (0) >0 such that ∥ (φ) ∥ < δ implies that x (t) →0 as t→ ∞.
Denote the sup norm as . We define the concept of stability in the sense of Mittag–Leffler as follows.
Definition 2.8. [33] The fractional difference equation (10) or the zero solution x of (10) is said to be Mittag–Leffler stable if
where α ∈ (0, 1) , - α < λ < 0, t0 is the initial time of consideration, m (x (t)) is locally Lipschitz on discrete domain D with m (0) =0, m (x (t)) ≥0 and is the Mittag–Leffler function defined in (8).
Remark. It is clear that Mittag–Leffler stability implies asymptotic stability.
The class– sequences are applied to analyze the fractional Lyapunov direct method. Thus, we need the following definition.
Definition 2.9. A bounded sequence is said to belong to class– if it is strictly increasing along with β (0) =0.
Main results
We assume that the following hypotheses are true throughout the remaining part of the paper.
The non-linear activation functions fj (·) and gi (·) are Lipschitz continuous with Lipschitz constants and
There exists constants F, G > 0, such that for any we have |fj (u) | ≤ F and |gi (v) | ≤ G for 1 ≤ i ≤ n, 1 ≤ j ≤ m .
and
For sake of simplicity, we use the following notations: and for i = 1, …, n, j = 1, …, m .
Lemma 3.1.Assume that v (t) is a sequence defined on withfor some constant γ where |γ|<1. Thenwhere γ0 = v (0).
Proof. In view of (11), there exists a non-negative sequence m such that
Let and . Then by using the discrete Laplace transform (9), we obtain
or
The application of the inverse Laplace transform and the use of the properties of Lemma 2.2 and 2.3 yield that
Since m and are non-negative functions, it implies that
Theorem 3.2.Let hypotheses (H1)- (H3) be satisfied. Then the solution of fractional-order BAM neural network (1)-(2) exists and is unique.
The proof of the above statement is attained by employing the Krasnoselskii fixed point theorem. To avoid redundancy, however, we will omit the proof and refer the reader to Theorem 3.1 of [41].
We will employ the technique of the Lyapunov function to prove the Mittag–Leffler stability of system (1)-(2).
Theorem 3.3.Assume that the hypotheses (H1) is satisfied. Then the equilibrium (x*, y*) T of (1)-(2) is Mittag–Leffler stable under the following condition:where and for i = 1, 2, ⋯ , n, j = 1, 2, ⋯ , m .
Proof. If (x*, y*) T is the equilibrium point, then the error where satisfy the following system:
We define the following Lyapunov function
For t ≥ 0, calculating the Caputo’s difference of v (t, e (t)) along solutions of (14), we obtain
Thus, we obtain
where k1 = min {c*, d*} , and By considering the solution e (t) satisfying Razumikhin estimate
we get
or
where γ > 0. Using Lemma 3.1, we obtain
or
where m0 = v (0, e (0)) = {∥ x (t) - x0 ∥ + ∥ y (t)- y0 ∥} = { ∥ x (t) - φ0 ∥ + ∥ y (t) - ψ0 ∥ } > 0 and m0 = 0 only if e (0) =0. Thus the solution is Mittag–Leffler stable.
In the following, we will prove the Mittag–Leffler stability of system (1). By virtue of the fact that any point can be shifted to the origin via a change of variables, we will consider the equilibrium point to be the origin. Let be a domain containing the equilibrium. Define the Lyapunov fucntion by (15).
Theorem 3.4.Let v be locally Lipschitz continuous with respect to x such thatwhere 0 < α < 1, and β1, β2β3 are arbitrary positive constants. Then the equilibrium (x*, y*) T = (0, 0) T of system (1) is Mittag–Leffler stable.
Proof. In view of (18) and (19), we obtain
Then there exists a function m, which is non-negative such that
Taking the Laplace transform of both sides, we get
where and M (s) = . Thus, we have
If e (0) ≠0, then v (0, e (0)) >0. By using that v (t, e (t)) is locally Lipschitz continuous with respect to e and applying the inverse Laplace transform to both sides, we get
Since m and are nonnegative functions, the above equation (23) can be rewritten as
where m0 = v (0, e (0)) . Now substituting equation (24) into equation (18), we obtain.
where and holds if and only if e (0) =0 . This implies that the zero equilibrium is Mittag–Leffler stable.
Lemma 3.5.Let z (0) = w (0) and c ∇ αz (t) ≥ c ∇ αw (t) where 0 < α < 1. Then z (t) ≥ w (t).
Proof. It follows from the assumption c ∇ αz (t) ≥ c ∇ αw (t) that there exists a sequence m which is non-negative and satisfies
Taking the Laplace transform of equation (26) implies
where and . Since z (0) = w (0), it follows that Z (s) = s-αM (s) + W (s) . Applying the inverse Laplace transform, we obtain
where m (0) =0. Since m is a non-negative sequence, we end up with the desired result.
Theorem 3.6.Let v (t, e (t)) and class– sequences β1, β2 and β3 satisfywhere 0 < α < 1. Then, the equilibrium (x*, y*) T = (0, 0) T of system (1) is asymptotically stable.
Proof. Following from inequalities (27) and (28), we obtain
In virtue of Lemma 3.5, we have v (t, e (t)) ≥0 that v (t, e (t)) ≤ v (0, v (0)). Here, we review two cases.
Case.1: Suppose there exists a t1 ≥ 0 satisfying v (t1, e (t1)) =0. Then from (27) we obtain that e (t1) =0. It follows that e = 0 is the equilibrium of system (1) that e (t) =0 for t ≥ t1.
Case.2: Suppose there exists a constant ɛ > 0 such that v (t, e) ≥ ɛ for t ≥ 0. It follows from v (t, e (t)) ≤ v (0, e (0)) that
Substituting (30) into (29) gives,
where . It follows that
Following the similar arguments as in Theorem 3.4, we reach to
This contradicts the assumption that v (t, e) ≥ ɛ. The consequences obtained in Case 1 and Case 2 imply that v (t, e) →0 as t→ ∞. It follows from (27) that .
Remark. If the assumptions of the above theorems hold globally on , then the equilibrium is globally Mittag–Leffler stable.
Numerical examples
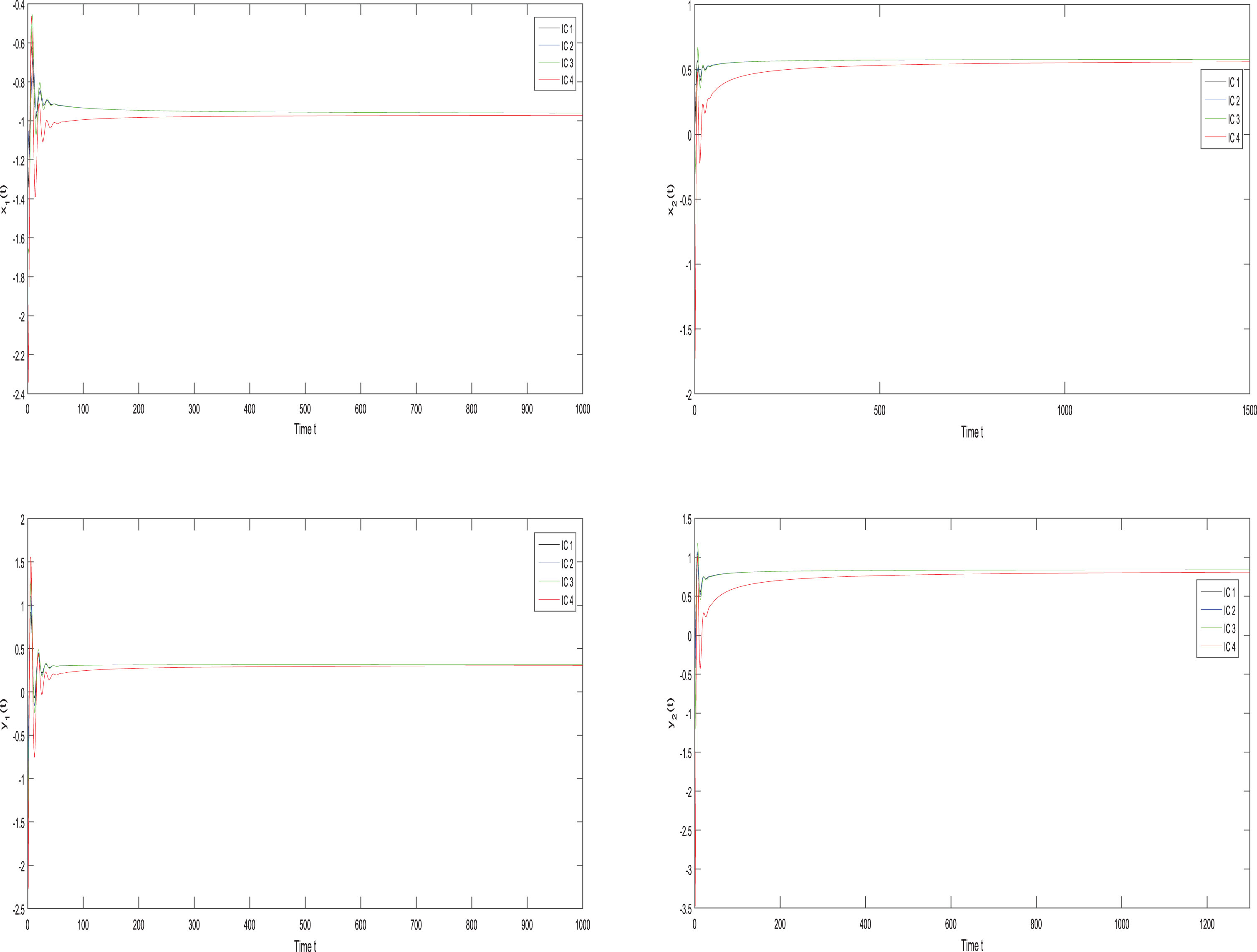
Example 1. Consider the following system
This corresponds to system (1) with α = 0.8, τ = 0.04 . The activation functions are chosen as fj (·) = gi (·) = tanh(·) , i, j = 1, 2 . The equilibrium point of system (4) is
Furthermore, we have Lf = Lg = 1, and {ci, dj} = min {5, 4} =4 . Moreover, one can easily find that = 0.5 . Thus, condition (13) of Theorem 3.3 is satisfied. Hence, the equilibrium of system (4) is globally Mittag–Leffler stable and hence asymptotically stable. Figure 1 illustrates the trajectories of variables xi (t) and yj (t) of system (4) for t ∈ [-0.04, 0] . The following set of initial values is considered in simulation:
The state trajectories of stable solutions of (31).
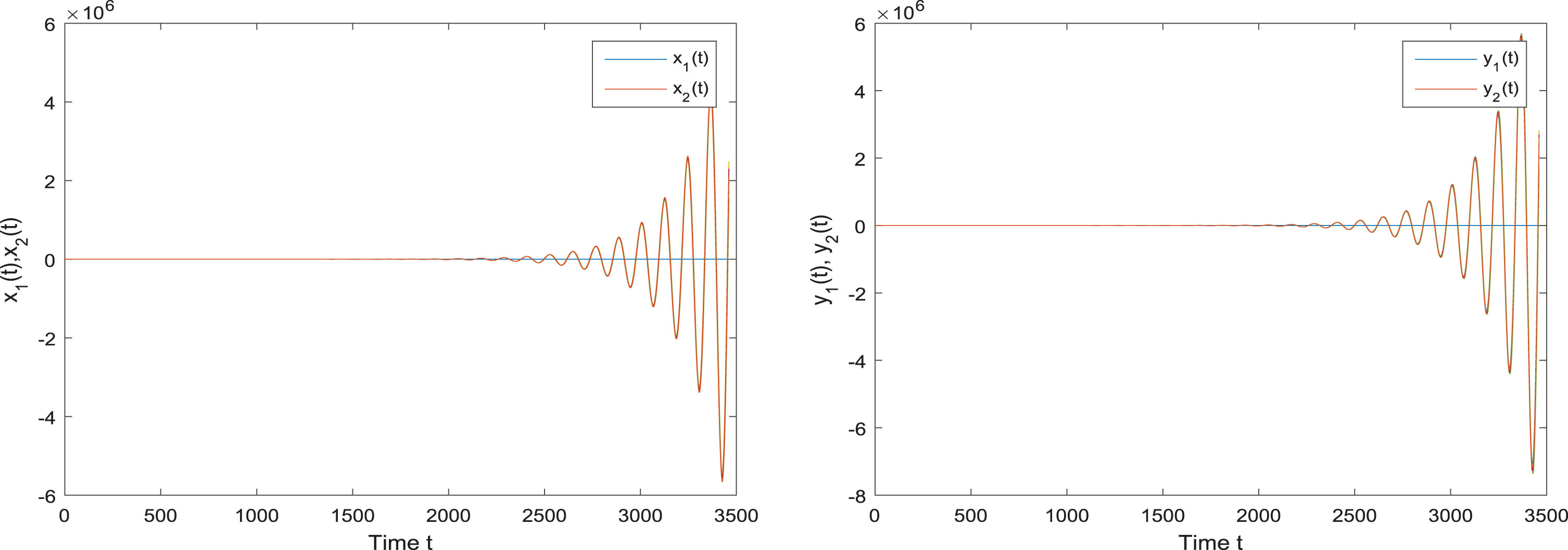
Never the less, we observe that if we change the coefficients ci, di such that and the time delay value as 0.5 with similar initial conditions, then the condition (13) of Theorem 3.3 is not satisfied. In this case, the solution loses its stability and becomes divergent. This behaviour can be depicted via Fig. 2:
The state trajectories of unstable solutions of (4).
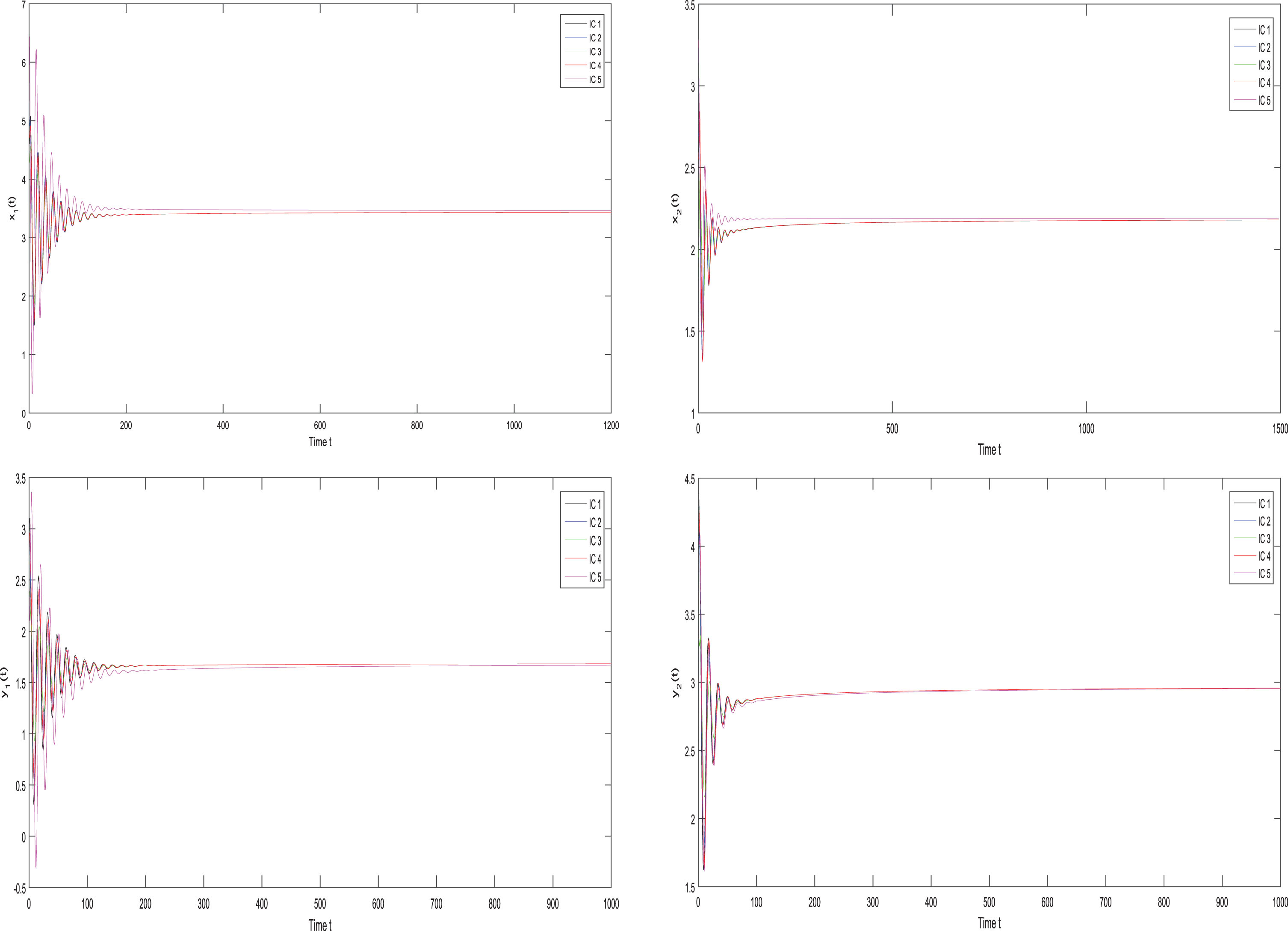
Example 2. Consider the following system with different activation functions;
where α = 0.9 and τ = 0.03 . The activation functions are and fj (yj) The equilibrium point for system (32) is
Thus Lf = Lg = 1 . Furthermore {0.6, 0.3} =0.6 . Thus, condition (13) is fulfilled. Following Theorem 3.3, the equilibrium is globally Mittag-Leffler stable and hence asymptotically stable. The simulation results are shown for t ∈ [-0.03, 0] in Fig. 3. We consider the following set of initial values:
The state trajectories of stable solutions of (32).
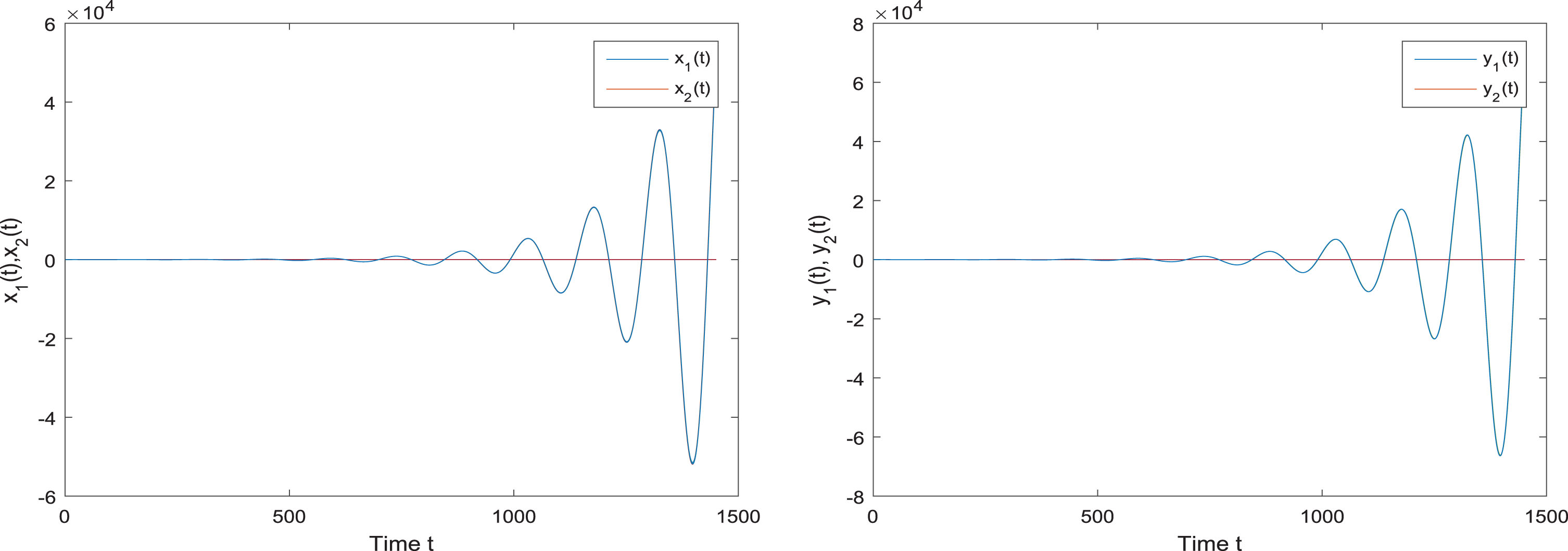
However, if we change the coefficients ci, di such that and the time delay value as 0.5, then it violates condition (13) of Theorem 3.3. Hence the solution is not Mittag-Leffler stable. Figure 4 depicts the unstable behaviour of the solution of system (32).
The state trajectories of unstable solutions of (32).
Concluding remarks
This paper studies stability results for the fractional difference BAM neural networks. Particularly, sufficient conditions are established for the existence, uniqueness and global Mittag–Leffler stability for the nontrivial solutions of the addressed system. The newly established discrete fractional calculus are used to set the problem. We employ the techniques of the Lyapunov function and Lyapunov direct method in the frame of discrete fractional calculus to prove the main results. We believe that the investigation of neural networks in discrete fractional settings will lead to a better understanding of fractional dynamics. We have considered Caputo fractional derivative with nabla backward differences in this work. For future consideration, we will try to explore the opportunity to utilize different types of definitions of fractional differentiation and integration to prove results related to stability, almost periodicity and control.
Footnotes
Acknowledgment
The authors would like to express their appreciation for the valuable comments of the reviewers and editor. J. Alzabut would like to thank Prince Sultan University for funding this work through research group Nonlinear Analysis Methods in Applied Mathematics (NAMAM) group number RG–DES–2017–01–17. S. Tyagi thanks Science and Engineering Research Board, DST, India for partial support through grant No. PDF/2016/002932.
References
1.
HilferR., Applications of Fractional Calculus in Physics, Word Scientific, Singapore, 2000.
2.
DebnathL., Recent applications of fractional calculus to science and engineering, Int J Math Math Sci54 (2003), 3413–3442.
3.
KilbasA.A., SrivastavaH.M., TrujilloJ.J., Theory and Applications of Fractional Differential Equations, vol. 204 of North–Holland Mathematics Studies, Elsevier Science, Amsterdam, The Netherlands, 2006.
4.
DiethelmK., The Analysis of Fractional Differential Equations, Lecture Notes in Mathematics, Springer, 2010.
5.
IsmailG.M., Abdel-RahimH.R., Abdel-AtyA., KharabshehR., AlharbiW. and Abdel-AtyM., An analytical solution for fractional oscillator in a resisting medium, Chaos, Solitons & Fractals130 (2020), 109395.
6.
OwyedS., AbdouM.A., Abdel-AtyA. and RayS.S., New optical soliton solutions of nolinear evolution equation describing nonlinear dispersion, Communications in Theoretical Physics71 (2019), 1063–1068.
7.
AticiF.M. and EloeP.W., Initial value problems in discrete fractional calculus, Proc Amer Math Soc137(3) (2009), 981–989.
8.
AbdeljawadT., On Riemann and Caputo fractional differences, Comput Math Appl62(3) (2011), 1602–1611.
9.
AbdeljawadT. and BaleanuD., Fractional differences and integration by parts, J Comput Anal Appl13(3) (2011), 574–582.
10.
AbdelhakemM., AhmedA. and El-kadyM., Spectral monic chebyshev approximation for higher order differential equations, Math Sci Lett8 (2019), 11–17.
11.
HadhoudA.R., Quintic non-polynomial spline method for solving the time fractional biharmonic equation, Appl Math Inf Sci13 (2019), 507–513.
ZhuJ., ZhangQ. and YangC., Delay–dependent robust stability for Hopfield neural networks of neutral–type, Neurocomputing72(10-12) (2009), 2609–2617.
14.
LiX. and JiaJ., Global robust stability analysis for BAM neural networks with time–varying delays, Neurocomputing120 (2013), 499–503.
15.
YangX., SongQ., LiuY. and ZhaoZ., Uniform stability analysis of fractional–order BAM neural networks with delays in the leakage terms, Abstr Appl Anal2014 (2014), 16. Article ID 261930.
16.
CaoY. and BaiC., Existence and stability analysis of fractional order BAM neural networks with a time delay, Applied Mathematics6 (2015), 2057–2068.
17.
YangX., SongQ., LiuY. and ZhaoZ., Finite–time stability analysis of fractional–order neural networks with delay, Neurocomputing152 (2015), 19–26.
18.
LiR., CaoJ., AlsaediA. and AlsaadiF., Stability analysis of fractional–order delayed neural networks, Nonlinear Anal Model Control22(4) (2017), 505–520.
19.
ZhangH., YeR., CaoJ., AhmedA., LiX. and WanY., Lyapunov functional approach to stability analysis of Riemann–Liouville fractional neural networks with time–varying delays, Asian J Control20(6) (2018), 1–14.
20.
MatignonD., Stability results for fractional differential equations with applications to control processing, Proceedings of the IMACS–SMC2 (1996), 963–968.
21.
DengW., LiC. and LuJ., Stability analysis of linear fractional differential system with multiple time delays, Nonlinear Dynam48 (2007), 409–416.
22.
WenX., WuZ. and LuJ., Stability analysis of a class of nonlinear fractional-order systems, IEEE Trans Circuits Syst II55 (2008), 1178–1182.
23.
ZhouX., HuL., LiuS. and JiangW., Stability criterion for a class of non-linear fractional differential system, Appl Math Lett28 (2014), 25–29.
24.
ZhangF., LiC. and ChenY., Asymptotical stability of non-linear fractional differential system with Caputo derivative, Internat J Diff Equations2011, 12. Article ID 635165.
LiY., ChenY. and PodlubnyI., Stability of fractional–order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag—Leffler stability, Comput Math Appl59(5) (2010), 1810–1821.
27.
ChenJ., ZengZ. and JiangP., Global Mittag–Leffler stability and synchronization of memristor–based fractional–order neural networks, Neural Networks51 (2014), 1–8.
28.
ZhangS., YuY. and WangH., Mittag–Leffler stability of fractional–order Hopfield neural networks, Nonlinear Anal Hybrid Syst16 (2015), 104–121.
29.
DingZ., ShenY. and WangL., Global Mittag–Leffler synchronization of fractional–order neural networks with discontinuous activations, Neural Networks73 (2016), 77–85.
30.
TyagiS., AbbasS. and HafayedM., Global Mittag-–Leffler stability of complex valued fractional–order neural network with discrete and distributed delays, Rend Circ Mat Palermo II65(3) (2016), 485–505.
31.
WuA., LiuL., HuangT. and ZengZ., Mittag–Leffler stability of fractional–order neural networks in the presence of generalized piecewise constant arguments, Neural Networks85 (2017), 118–127.
32.
WuG.-C., BaleanuD. and LuoW.-H., Lyapunov functions for Riemann-Liouville-like fractional difference equations, Appl Math Comput314 (2017), 228–236.
33.
WuG.-C., BaleanuD. and HuangL.L., Novel Mittag–Leffler stability of linear fractional delay difference equations with impulse, Applied Mathematics Letters82 (2018), 71–78.
34.
WuG.-C. and BaleanuD., 2. Stability analysis of impulsive fractional difference equations, Frac Calc Appl Anal21 (2018), 354–375.
35.
AbdeljawadT. and AticiF.M., On the definitions of nabla fractional operators, Abstr Appl Anal201213. Hindawi.
36.
AbdeljawadT., JaradF. and BaleanuD., A semigroup–like property for discrete mittag–leffler functions, Adv Difference Equ2012 (2012), 72.
37.
HolmM.T., The Laplace transform in discrete fractional calculus, Computers and Mathematics with Applications62 (2011), 1591–1601.
38.
AbdeljawadT., On delta and nabla Caputo fractional differences and dual identities, Discrete Dyn Nat Soc2013, 12. Article ID 406910.
39.
AbdeljawadT. and BaleanuD., Discrete fractional differences with non-singular discrete Mittag–Leffler kernels, Adv Difference Equ2016 (2016), 232.
40.
AlzabutJ., AbdeljawadT. and BaleanuD., Nonlinear delay fractional difference equations with applications on discrete fractional Lotka—Volterra competition model, J Comput Anal Appl (2018), 889.
41.
AlzabutJ., TyagiS. and AbbasS., Discrete fractional-order BAM neural networks with leakage delay: Existence and stability results, Asian J Control22(1) (2020), 1–13.