
Abstract
The problem of solving linear and nonlinear system of equations is a largely useful issue of significant importance such as that it is presented on real-time applications. Different numerical methods such as fixed-point, Newton Raphson, bisection and secant methods, and or others, namely; evolutionary and computational methods are used to solve nonlinear system under optimizing the space and time complexity. Genetic Algorithm (GA) proved to be an efficient soft computing approach to solve many linear/non-linear system of equations. In this article, a comparison between different GAs and numerical methods for solving a system of equations are introduced. From the results, a novel approach is introduced which is inspired by using a modified GA to get the optimistic solution for the system which has no numerical solution and verified with the highest performance measures in solving complicated problems.
Keywords
Introduction
Solving system of nonlinear equations arise in many domains of practical importance such as engineering, mechanics, medicine, chemistry, and robotics. Most of the time finding an exact solution is kind of impossible task (due to singularity of the coefficients matrix). Solving such a system involves finding all the approximated solutions. The successful application of the multi objective optimization (MOO) approaches is well known and there is a large amount of work in this field reporting applications in different domains in science and engineering. One approach is based on Pareto-based multi objective evolutionary algorithms applied to a real-world power system as multi objective nonlinear optimization problem [1–5]. Specifically, the non-dominated sorting genetic algorithm (NSGA) [6, 7], For environmental and economic electric power dispatch problem the algorithm of niched Pareto GA and strength Pareto evolutionary are built and applied. It can be shown that when dealing with the MOO of the tire suspension system of a racing car, the large numbers of variables and objectives must be considered given a fuzzy definition of optima, presented as a generalization of Pareto optimality, and the result of such approach considered as a subsets of Pareto solutions can be legitimately chosen as a result of contribution from the designer [2]. The optimal solutions were obtained and compared with the previously results based on the design of experiment techniques and different MOO strategies.
A non-linear system of equations ψ1, ψ2, ..., ψ
n
is defined in terms of n variables (z1, z2,..., z
n
) as
Genetic algorithm (GA)
As known that Biologists have applied genetic science to find the information that passed from parents to children by the genes. In this regard the GA have been used for different optimization problems in many branches of sciences such as engineering, biology, economics, image processing and physics [6, 8]. Also, GAs have been solved MOO problems and were implemented in applications for a long time [9–12].
The modified GA is listed as following steps
The evolution that occurs to individuals of the population over generations usually begings randomly so that in each generation each individuals of the population, the appropriateness of each member of the population is assessed, the current population are that selected based on their fitness, and modified (reintegrated and possibly mutated) to form another new population. As given in timetabling, scheduling, and travelling sales man’s problem, the GA is applied in different problems which present the successfully methods in optimization problems. It depends on the concept of developing solution acording derterimined fitness function to stochastically developing generations of solution population to determine the best fit solution to the problem. The application GA in obtaining solutions of system of nonlinear equations simultaneous is presented as the main objective of this paper which contain a search for optimal values for the unknown variables in some equations to discribe the best fit the system. Also, the competence and efficiency of GA is compared with the others numerical methods.
Newton’s method
In numerical analysis, Newton’s method, also known as the Newton–Raphson method, named after Isaac Newton and Joseph Raphson.
Let us assume that z i be a guessed value, based on extrapolation one can find another better guess where the function will be updated [13–15].
By repeated, the above procedure based on the updated value of z
k
as the guess, until the values of G (z) are close to zero. Hence G (z). This minimize the difference between right and left side over the absolute value to equation. Also, this is described by the absolute value of the left term since the right term is zero. Hence, the two system
In this section, we reported to comparisons to obtaining results from a set of experiments by using the proposed approach. Applications that considered in this section will be considered in the subsequent section.
Example: combustion chamber problem
Numerical approach
As kown that the process of combustion is increased in the internal energy of a gas. These incereasing lead to increasing volume, pressure, or temperature depending on the configuration. In cylinder of a reciprocating engine as other example, we control of the volume level and combustion creates an increase in pressure in a continuous flow system [16], according to the combustion problem we consider a temperature of 3000°C.
The target problem can be formulated as:
The output of normal combustion Chamber model under numerical approach
The output of normal combustion Chamber model under GA approach (see Fig. (1))
The output of normal combustion Chamber model under GA approach (see Fig. (1))
Numerical approach
The coefficients matrix is almost singular, no solution could be found.
Genetic approach
This system is a complicated version of the combustion chamber model, the system can be represented as follows:
Numerical approach
The coefficients matrix is singular, no solution could be found. The problem determinted of there are a given a 6-revolute manipulator (links or rigid-bodies that connected together by joints to each link connected to not more than two others) [2, 10]. The first step is visulaze the link designated the base, and the last link designated the hand of the robot. In this case the problem is determined by a possible positions of the hand, given that the joints are movable. This problem is shown to be The solution of a system of eight nonlinear Equations is equivalent this problem. If the solution of a system isdefined by where in eight unknowns z = {z1, z2, … . . , z8} ∈ [-1, 1] 8 . The problem can be stated as:
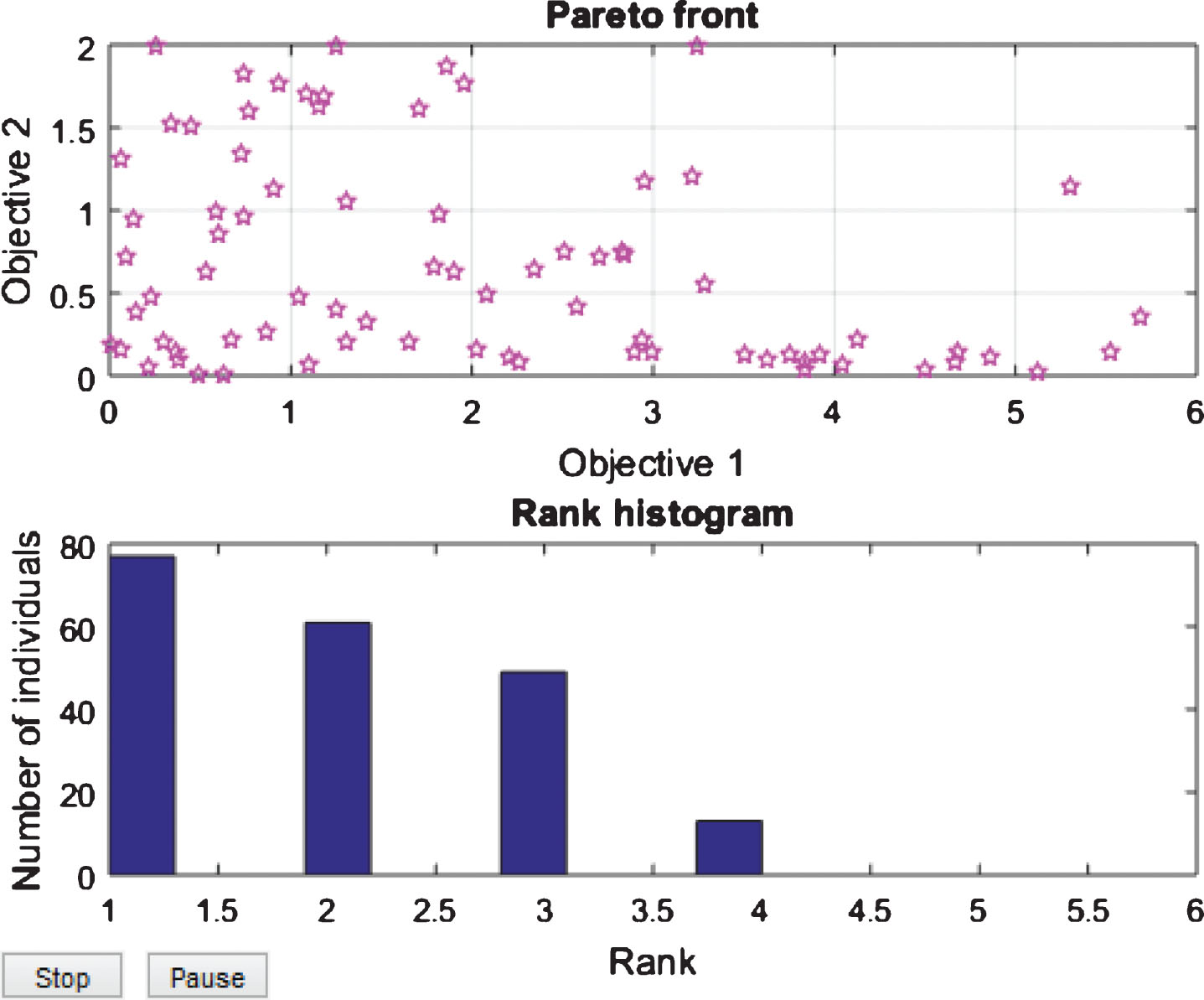
Results for solving Robot Kinematics problem Model using GA (see Fig. (4))

Pareto fron.
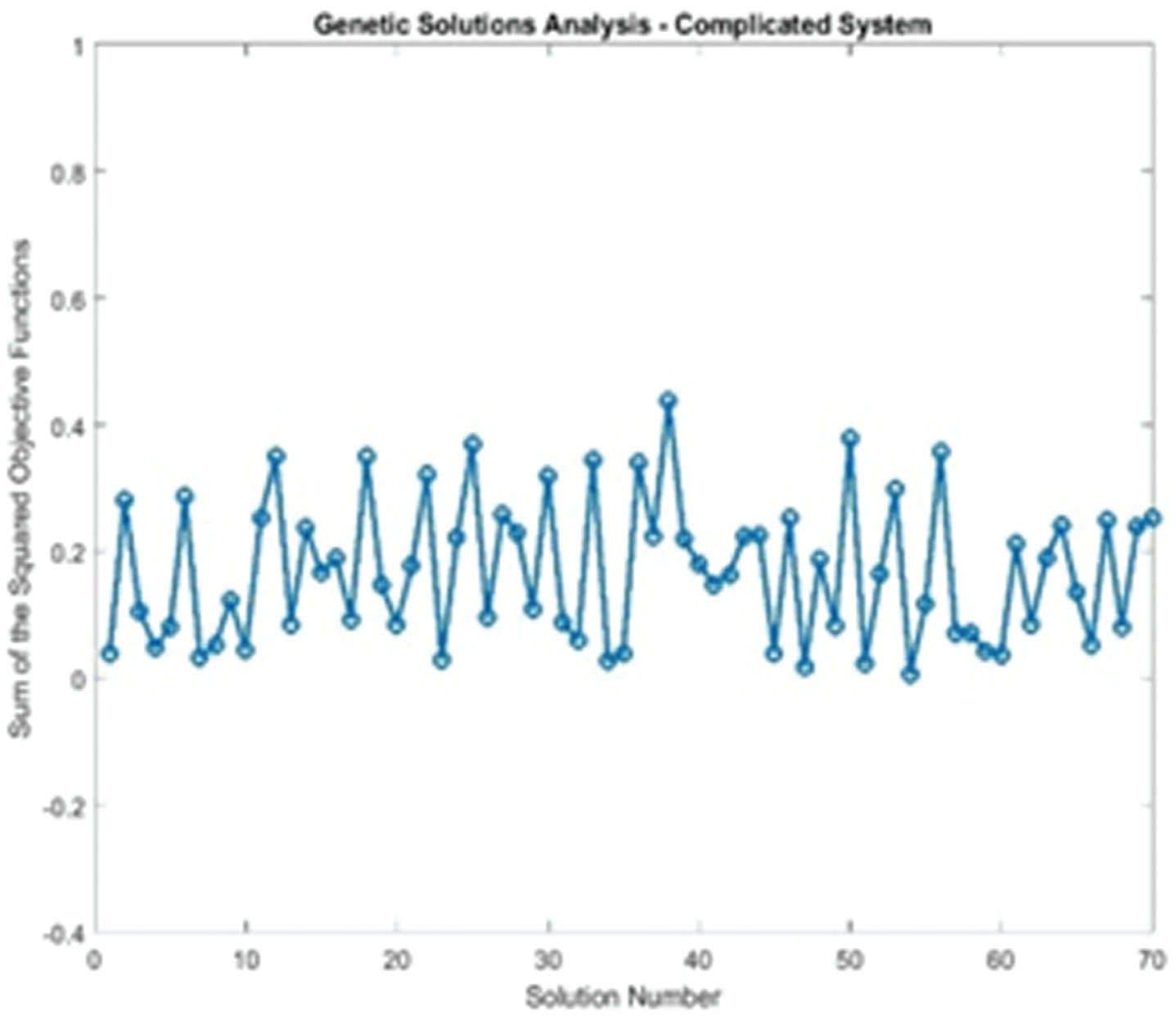
GA Analysis for Complicated.
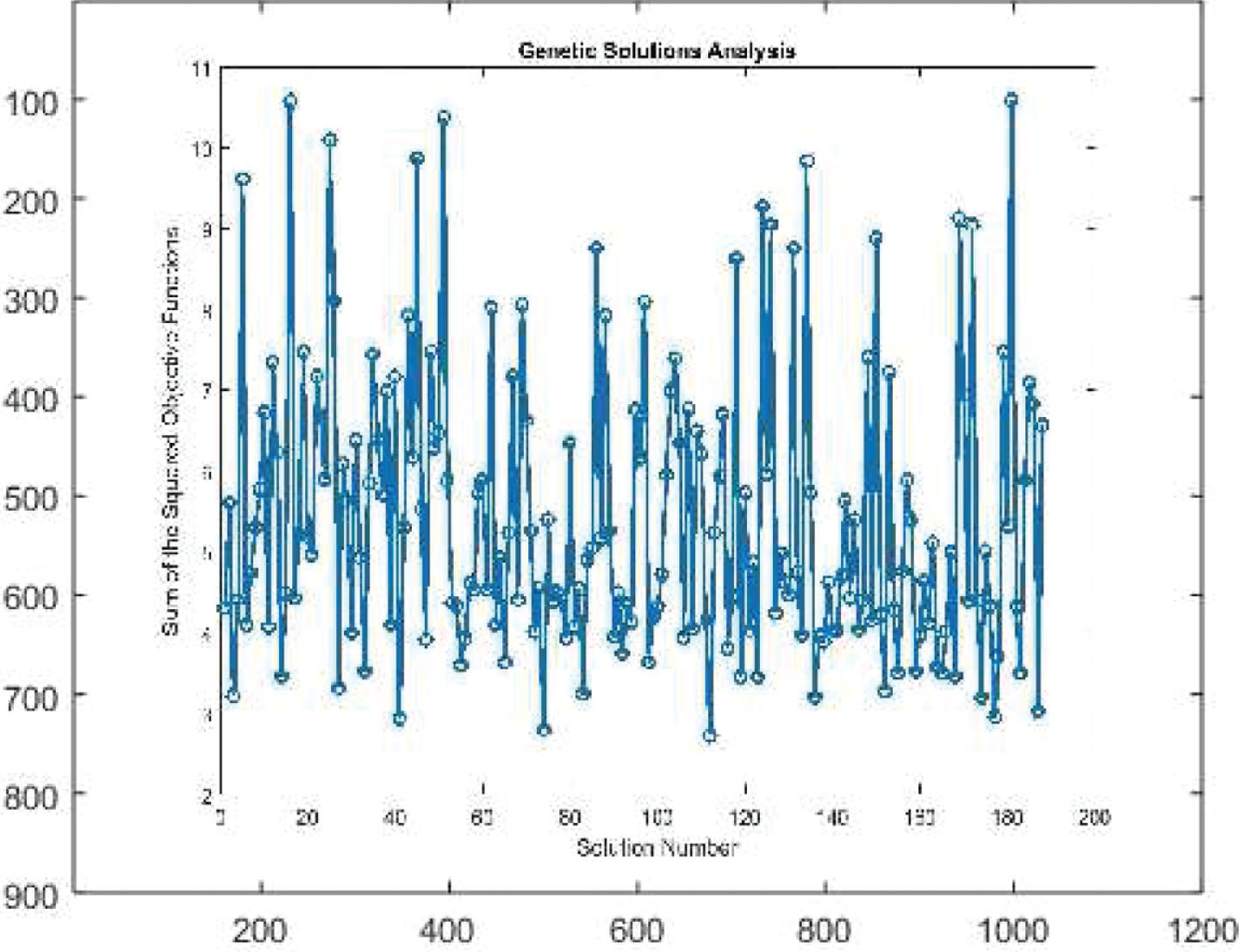
Genatic analysis for complicated cobasition Camber.
GA Analysis for Robot Kinematics problem.
Numerical approaches can find the exact solution for most of the Linear/Non-linear systems. Some of the Linear/Nonlinear systems have no exact solution, in other words the coefficient matrix is almost singular. In this type of system, we look for the closest solution which solves the system. One of the best and easy approaches is the genetic optimization approach. In this work, this criterion is approved by using a modified GA to get the optimistic solution for the system which has no numerical solution. Compared with the Newton, GA makes the global solution more efficient and accelerates the convergence speed. The genetic choosing operation was enhanced through the artificial selection and immigration operator. Moreover, GA proves the ability to find many solutions close to the exact solution. The best solution is found which minimizes the error with the exact. Whereas, the numerical approach finds no solution.
Footnotes
Acknowledgment
This work was founded by the Deanship of Scientific Research (DSR), King Abdulaziz University, Jeddah, Saudi Arabia under grant no. (D-000-000-1441). The authors, therefore, acknowledge with thanks DSR technical and financial support.