
Abstract
In view of the objectively ambiguous feature of infrared image of unmanned autonomous ship, this paper presents a quantitative method to deal with the ambiguity problem in infrared image by using the fuzzy mathematical model to realize the purpose of intelligent recognition of infrared imaging target. In order to simplify the computation of target recognition and improve the response time and accuracy in the selection of target features in infrared images, three features of target location, radiation distribution and shape are selected for analysis in this paper. The membership functions of these three features are weighted to calculate the confidence, and the classification and recognition are realized according to the confidence. Finally, the simulation results show that the recognition method proposed in this paper can effectively identify the target, and the recognition rate is very high. Compared with the recognition methods based on neural network and SVM, the recognition distance of this method is longer than that of the latter two methods.
Keywords
Introduction
With the development of science and technology, shipping has entered the era of intelligence, and there are also unmanned autonomous ships on board. At present [1], the autonomous navigation test ship Zhiteng developed in China has successfully demonstrated autonomous navigation and autonomous collision avoidance. As an autonomous unmanned ship [2], it is very important to avoid collision with other ships when it sails autonomously at sea. Especially in the harsh environment of strong wind, heavy rain and so on. Therefore, how to prevent collision between ships and improve the navigability of ships has become an urgent problem to be solved.
Nowadays, the ship detection system mainly relies on infrared detector to detect the environment around the ship. At present, many domestic researchers have studied ship detection technology based on infrared image. WangWenxiu [3] et al. proposed a detection algorithm based on deep convolution neural network (CNN) to solve the problems of low recognition rate and slow recognition speed caused by blurred infrared ship images. The author combines marker watershed segmentation algorithm with depth CNN to recognize ship targets quickly and accurately. Zhang Difei [4] et al. proposed a classification algorithm based on machine learning for infrared ship target recognition under sea-sky background. The algorithm uses SVM classifier to classify HOG features of extracted images. Experiments show that the algorithm has good performance and can effectively identify infrared ship targets. However, when using infrared sensors to acquire ship target images, it is still difficult to detect the target if the image quality is low because the texture and geometric features of the ship target in the infrared image are not obvious.
Fuzzy mathematics is a new mathematical model for studying and dealing with fuzziness. Because the texture and geometric features of ship targets in infrared images are not obvious, there exists objectively fuzzy phenomenon in infrared images. Therefore [5], the fuzziness problem in infrared images can be quantitatively dealt with by using fuzzy mathematical models. In this paper, a fuzzy mathematical model is proposed for target recognition in infrared images, in order to effectively identify ship targets and to extend the recognition distance. Firstly, this paper introduces the whole process of infrared image target detection, including image preprocessing, image feature extraction, and then uses the fuzzy mathematical model to identify the image target. Then, the effectiveness of the algorithm is validated by computer simulation experiments, and the effects of target recognition methods based on fuzzy mathematical model, SVM-based intelligent target recognition method and neural network-based intelligent target recognition method for ship infrared imaging are compared.
Intelligent recognition method of infrared imaging target for autonomous ship based on fuzzy mathematical model
Concept of fuzzy mathematics
In 1965 [6], American cybernetics expert Professor ZadeZadeh proposed to use “membership function” to describe the intermediate transition of phenomenal differences, which marked the birth of fuzzy mathematics. The basic idea of fuzzy mathematics is to describe and model a large number of fuzzy concepts and phenomena in the real world with precise mathematical means, so as to achieve the purpose of dealing with them properly. There are some basic concepts in fuzzy mathematics.
1) Fuzzy sets
Modern mathematics is based on set theory. Fuzzy sets refer to sets without definite boundaries. It transforms the original common set’s judgment of the absolute or non-existent belongings or non-belongings of genera and attitudes into relative judgments of genera and attitudes from 0 to varying degrees.
2) Membership function
The membership function [7, 8] refers to the characteristic function of the fuzzy set. It is mainly to distinguish the ordinary set from the fuzzy set. The main methods to determine membership function are distribution statistics, comparative average and fuzzy statistics.
A. Distribution statistics
The step of calculating membership function by distribution statistics method is to determine the factors of the set first; select some factors for experiment; find out the maximum and minimum values of each factor data, calculate the group spacing, calculate the number of data falling in each group, and determine the appropriate membership degree according to the number distribution.
B. Contrast averaging method
The step of calculating membership function by means of comparative averaging method is to determine the degree of membership of each factor i n the universe U = {x1, x2, x3, …, x n } according to a certain characteristic standard, and to group each two factors into a group. Symbol g (x i , x j ) is used to express (i, J = 1, 2,..., n) their membership degree.
C. Fuzzy Statistical Method
The steps of calculating membership function by fuzzy statistics are: determining the universe and factor set; asking the participants to vote on whether the points given in the universe belong to the factor set; and calculating the membership function by counting the voting results.
3) Fuzzy Relations
Relation is a mathematical model describing the relationship between things, while fuzzy relation is a generalization of general relation. Ordinary relations describe the presence or absence of elements, while fuzzy relations describe the number of relations between elements.
4) Fuzzy Matrix
Matrix can be used to represent relations. If set A has m elements, set B has n elements, and matrix
5) Fuzzy comprehensive evaluation method
Fuzzy comprehensive evaluation method is based on the membership degree theory of fuzzy mathematics to transform qualitative evaluation into quantitative evaluation. It can better solve the problems that are fuzzy and difficult to quantify, and it is suitable for solving various uncertain problems. The process of the fuzzy comprehensive evaluation method is as follows [9]:
A. Determine the domain of evaluation index set U: U = {u1, u2, u3, …, u m } (m is the number of index items)
B. Confucian Analects V: V = {v1, v2, v3, …, v n } (n is the number of evaluation grades)
C. Determine the Fuzzy Vector A of Weight Distribution: A = {a1, a2, a3, …, a m } (m is the number of index items)
D. The actual evaluation is carried out to form the evaluation fuzzy matrix R:
E. Fuzzy transformation:
F. The results of normalized ambiguity change are obtained:
G. According to the method of maximum membership degree,
Fuzzy mathematical model
Fuzzy mathematics [10] is a new mathematical model for studying and dealing with fuzziness. Because the texture and geometric features of ship targets in infrared images are not obvious, there exists objectively fuzzy phenomenon in infrared images. Therefore, the fuzziness problem in infrared images can be quantitatively dealt with by using fuzzy mathematical models. The steps needed to establish a fuzzy mathematical model are shown in Fig. 1. Firstly, the characteristic indexes of infrared image target are selected to form a set of indices A = A1, A2, An; then the membership functions corresponding to each feature are determined according to a certain method; the index weights of the membership functions corresponding to each feature are determined, and these membership functions are weighted together to form a fuzzy mathematical model, and the confidence in the model is calculated. Then, the target is recognized according to the confidence.

The process of establishing a fuzzy mathematical model.
1) Establishment of indicator set
This stage is to select feature factors and construct feature sets. The set of constructed features is A = A1, A2, An.
2) Determining membership function
The corresponding membership function is constructed for each feature factor. The membership function constructed by each feature factor can be one or more.
3) Establishing the index weight and constructing the recognition fuzzy set
Because the fuzzy comprehensive evaluation method is used in the fuzzy mathematical model, it is necessary to synthetically evaluate the membership function of each feature. In the process of synthetical evaluation, different index weights of each membership function should be given according to some method.
4) Solving the Fuzzy Mathematical Model for Target Recognition
The principle of proximity is used to determine the attribution of the object to be identified, and the target recognition is completed. Let Zj (j = 1, 2,... i) be a fuzzy subset of the eigenvectors in the universe. If R (Zj, Mi) = max {N (Zj, Mi) · k} exists, where k is the weight, Zj is considered to be the closest to Mj, and Zj is considered to belong to Mj model and get the target image.
Ship infrared imaging target recognition is also a kind of pattern recognition. It studies how to extract target from complex background environment and make correct behavior judgement. The fuzzy mathematical model is applied to ship infrared imaging target recognition. The process is shown in Fig. 2. Firstly, the infrared image is preprocessed, which includes image filtering, image enhancement and image segmentation. Then, the target features (such as location features, radiation distribution features, etc.) are extracted from the segmented image, and a feature set is formed. According to their membership function, a corresponding fuzzy mathematical model is constructed to recognize the image.

The process of target recognition for ship infrared imaging.
1) Preprocessing of Infrared Images
The main purpose of infrared image preprocessing is to suppress background clutter, highlight the feature information of the target and improve the image quality. Image preprocessing mainly includes image filtering, image enhancement and image segmentation.
A. Image filtering
Image filtering [11, 12] is to suppress the noise of the target image while retaining the details of the image as much as possible and its processing effect will directly affect the effectiveness and reliability of subsequent image processing and analysis. The commonly used image filtering methods are mean filtering; median filtering and directional gradient based filtering.
B. Image Enhancement
Image enhancement refers to the enhancement of the features of the target part in the infrared image and the suppression of the features of the non-target part in the image, that is, to highlight the focus of the image. In this paper, an algorithm based on spatial domain is used for image enhancement. The formulas are as follows:
Where g (x, y) represents the processed image, f (x, y) represents the filtered image, and H (x, y) represents the spatial conversion function.
C. Image Segmentation
The object of image segmentation [13, 14] is to separate the target from the background. In this paper, a region-based watershed segmentation method is used. Watershed method is a mathematical morphological segmentation method based on topological theory. The basic idea is to regard the image as geodesic topography. The gray value of each pixel in the image represents the elevation of the point. Each local minimum and its affected area is called catchment basin, while the boundary of the catchment basin forms a watershed.
2) Selection and extraction of target features
Through image preprocessing, the target has been separated from the background image. Next, we need to extract features from the target image. In order to simplify the computation of target recognition and improve the response time and accuracy, three features of target location, radiation distribution and shape are selected for analysis. Because the target image is recognized by using the fuzzy mathematical model, the corresponding membership function should be constructed when extracting the target features.
A. Target position characteristics
Ships are always between the sea and the sky. Therefore, in order to select the target position feature of infrared image, the position of the sea antenna in the infrared image should be determined first, and the searching range of the target should be reduced. Then the location characteristics of the target are determined.
a) To determine the sea antenna
The sea infrared image can be divided into three areas: sky area, sea area and sea antenna area. Because the sea antenna is not a straight line, this paper uses the method of line fitting to calculate the whole image of the sea antenna.
b) Identifying target position characteristics
Since the target in infrared image is always between sea and sky, the corresponding membership function is constructed as follows:
Among them, T1 and T2 are constants determined according to prior knowledge and image reality. d = y b - L m , and y b represent the bottom edge of the tightly segmented simple-connected zone gate; L m is the number of rows of the above-mentioned gate, and m is the number of rows of the above-mentioned gate. Fuzzy language is used to describe the location feature of the target. The target is the sea antenna with a certain distance in the image. When the distance reaches a certain level, it cannot be the goal.
B. Radiation Distribution Characteristics
Here, the target is determined according to the infrared radiation characteristics of the target. The target has high brightness because of the high temperature equipment such as boilers, chimneys, superstructure and so on. The variance of background mean in highlighted area is larger than that of background itself. Therefore, the fuzzy language describing the radiation distribution characteristics of the target is as follows: the larger the proportion of highlighted area to the total number of pixels in the segmentation area, the greater the possibility of judging the target; the bigger the deviation of the gray level of the pixels in the segmentation area from the background gray level, the greater the possibility of judging the target. According to the fuzzy sentence, two membership functions of radiation distribution characteristics can be constructed as follows:
Among them, R1 = N
b
/N is the ratio of the number of highlights in the segmentation area to the total number of targets in the segmentation area. T is a constant determined by prior knowledge and image reality.
R2 = σA t /σA b Represents the ratio of the variance of the relative background mean of the partition to the variance of the background. A t Denotes the partition area and A b denotes the background area. T1 and T2 are constants determined according to prior knowledge and image reality.
C. Shape characteristics
The shape features of the target image include aspect ratio and duty ratio. Fuzzy sentences for shape feature determination can be described as:
a) The larger the duty cycle of the segmentation area is far from a certain range, the less likely it is to judge the target. When it is larger than a certain value, it is impossible to be the target.
b) The larger the aspect ratio of the partitioned area is far from a certain range, the less likely it is to be judged as a target. When it is larger than a certain value, it is impossible to be a target.
Therefore, two membership functions corresponding to the shape feature of the target are constructed as follows:
Among them,
3) Fuzzy Classification and Recognition of Infrared Image Targets
After extracting the features of target image in infrared image, it is necessary to classify and recognize the image. This paper adopts a method of fuzzy comprehensive evaluation. It expresses each feature as the membership degree of the target set, and then uses these membership degrees to make comprehensive evaluation. The selected target features in this paper are target location, radiation distribution and shape features. The process of fuzzy comprehensive evaluation is shown in Fig. 3. As can be seen from Fig. 3, Firstly, membership functions μ (d), μR1, μR2, μR3 and μR4 of position, radiation and shape features are calculated respectively. Then, the membership function of each feature is weighted by W1, W2, W3 and W4 respectively. Finally, the confidence B of the final segmentation area belonging to the target is calculated by combining the combined values of all the features. Finally, the target is identified according to confidence B.
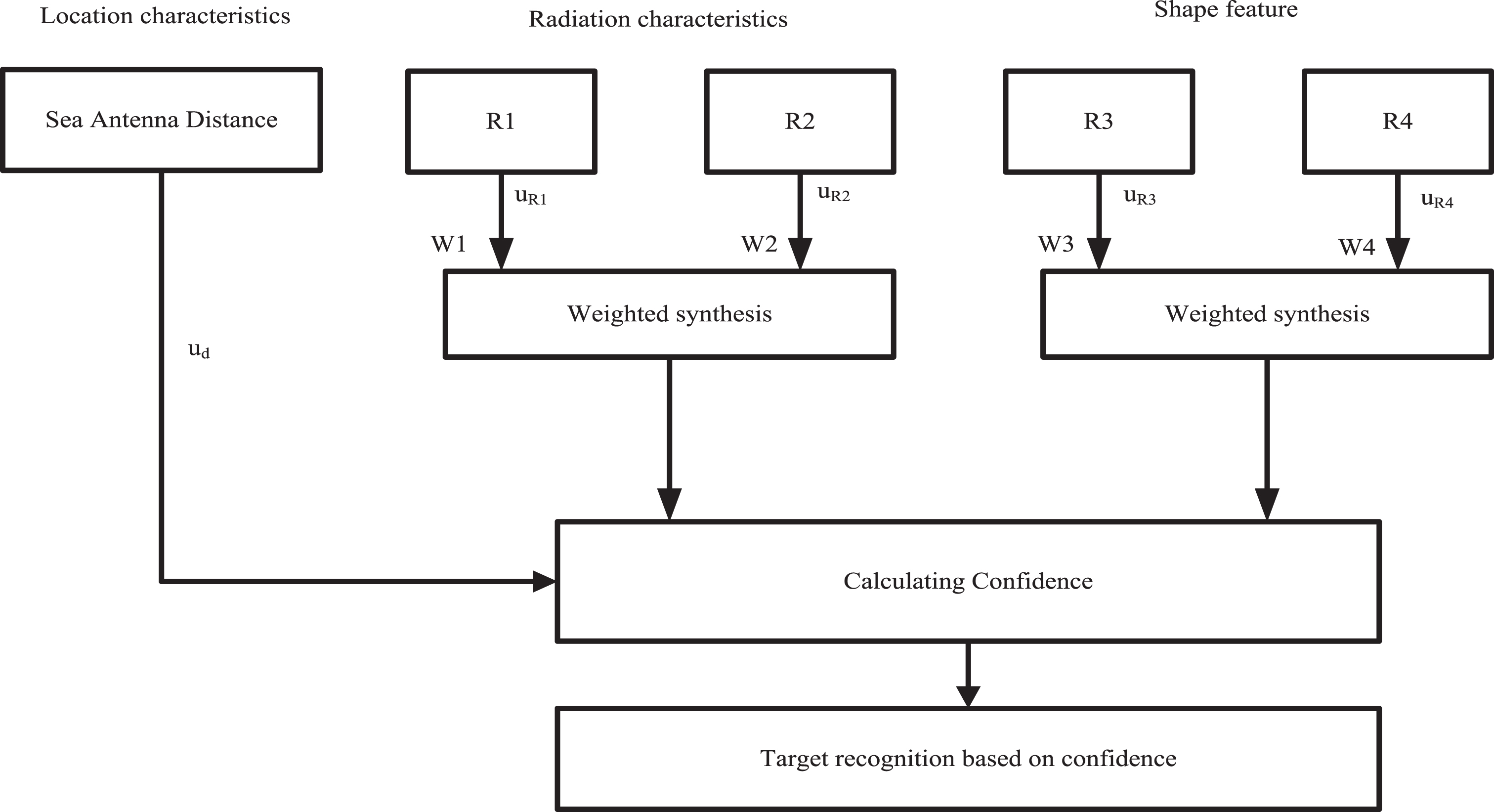
Fuzzy comprehensive evaluation process.
Among them, B denotes confidence and W1 + W2 = 1 ; W3 + W4 = 1, W1∼W4 is the weighted coefficient of comprehensive evaluation membership function. From Form 7, we can see that the confidence degree is composed of three parts, each part represents a certain kind of characteristics of the target, and each kind of feature is obtained by weighting 1–3 feature membership degrees. When B ≥ 0.5, the segmentation area is the target, and when B < 0.5, the segmentation area is not the target.
Verification of recognition accuracy experiments
In order to verify the recognition accuracy of the intelligent recognition method for infrared imaging target of unmanned autonomous ship based on the fuzzy mathematical model proposed in this paper, a computer simulation experiment is carried out by using the image data collected from the actual infrared image tape of a ship’s sea surface. In this paper, six hundred 300*400 pixel infrared images of eight scenes in the video tape are used. These images include 180 images with no background, 210 images with different background, 360 images with different distances and sides, 480 images with single target and 120 images with multiple targets.
The result of processing 600 images is that the target confidence of 585 images is greater than 0.5, and the background confidence is less than 0.5. The specific results of various types of image recognition are shown in Fig. 4. In Fig. 4, A reprents An image with only background and no target; B reprents targeted but with different backgrounds; Creprents target images with different distances and sides; D reprents single target image;Ereprents multiple target images
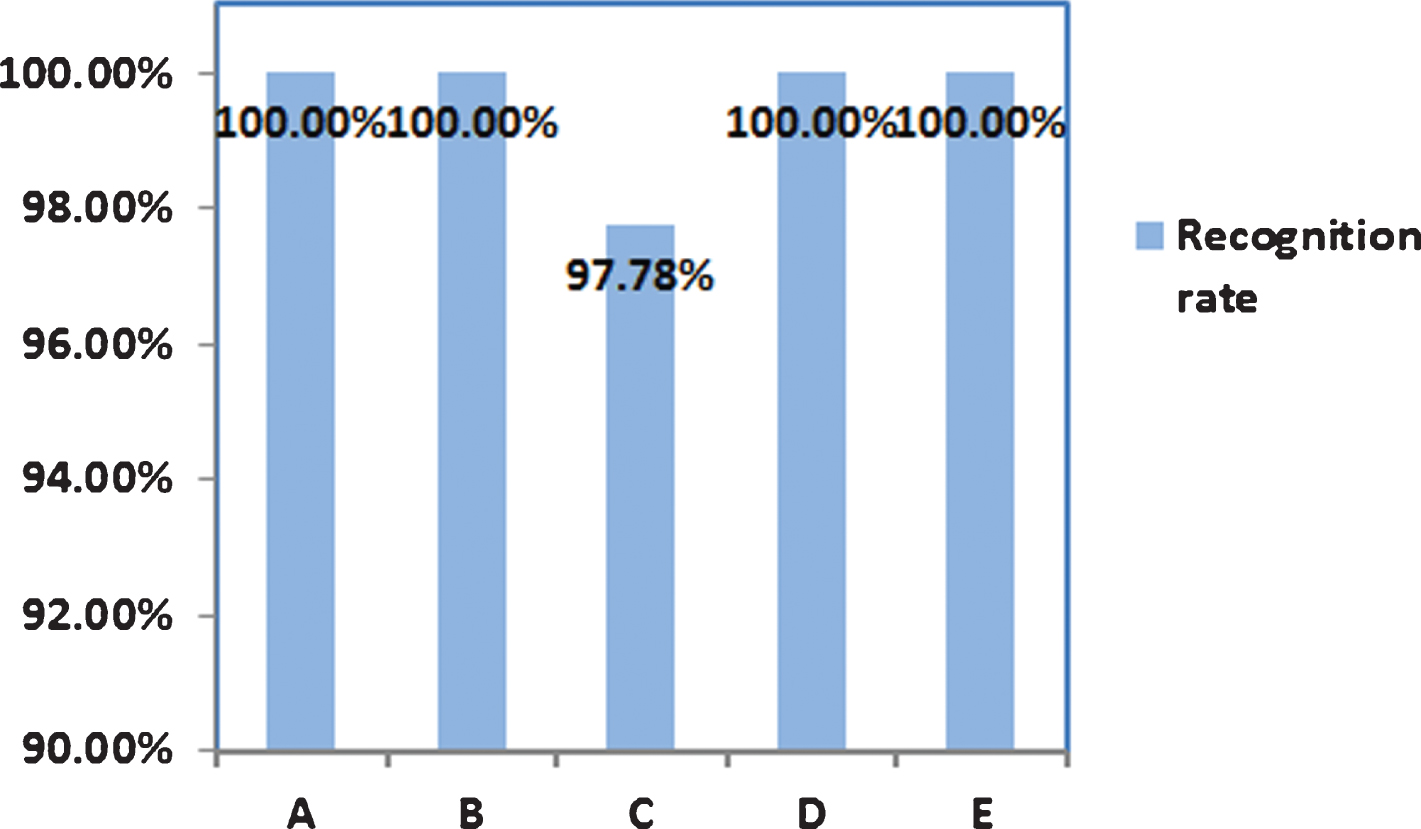
Recognition rate for recognition of several different classes of images.
For one of the single target images, the feature membership and confidence are calculated in Table 1.
Recognition results of single target images
Table 1 shows that the image is divided into two areas, the left area is the ship, and the right area is the non-ship area. The confidence of the left area is 0.9572, indicating that the area is the target image area (ship), and the right area is 0.2696, indicating that the area is the background area and non-target area.
In order to verify the effective recognition distance of ship infrared imaging target recognition method based on fuzzy mathematical model, this paper compares its recognition results with the intelligent recognition method of ship infrared imaging target based on neural network and the intelligent recognition method of ship infrared imaging target based on SVM. Compare the effective distances of the three methods. In this paper, three methods are applied to ship identification on a certain section of waterway.
The length of the channel is 120 m, with four ships berthing every 10 m. There are 48 target ships in the channel. Infrared image acquisition is carried out at the initial point of the channel. Now the target recognition is carried out by using the three methods mentioned above, and the recognition distance is shown in Table 2.
Recognition Distance of Three Methods for Target Recognition
Recognition Distance of Three Methods for Target Recognition
Recognition accuracy of intelligent recognition method based on fuzzy mathematics
As can be seen from Fig. 4, the recognition rate of the proposed recognition method reaches 100% in four cases: image with no target in background, image with different background, single target image and multi-target image. The recognition rate of target images with different distances and different sides also reached 97.78%, and the average recognition rate of all cases reached 99.556%. This shows that the intelligent recognition method of ship infrared imaging target based on the fuzzy mathematical model proposed in this paper can effectively identify the target, and the recognition rate is very high.
Comparison of target recognition distance
From Table 1, it can be seen that the intelligent recognition method based on fuzzy mathematics can still effectively identify four ships at a distance of 100 m from the acquisition image point. But when the distance is 110 meters, only part of the ship can be identified. Therefore, the maximum distance of the intelligent recognition method based on fuzzy mathematics is 100 m. The intelligent recognition method based on neural network can only recognize some of the ships when the distance is more than 80 m, and even can’t recognize the ships when the distance is more than 100 m. Intelligent recognition method based on SVM can only recognize some of the ships when the distance is more than 90 m, even more than 110 M. From the results in Fig. 5, we can see that the effective recognition distance of the intelligent recognition method based on Fuzzy Mathematics > the effective recognition distance of the intelligent recognition method based on Neural Network > the effective recognition distance of the intelligent recognition method based on SVM. Compared with the other two methods, the intelligent recognition method based on fuzzy mathematical model for infrared imaging target of autonomous ship can avoid collision with other ships more effectively.
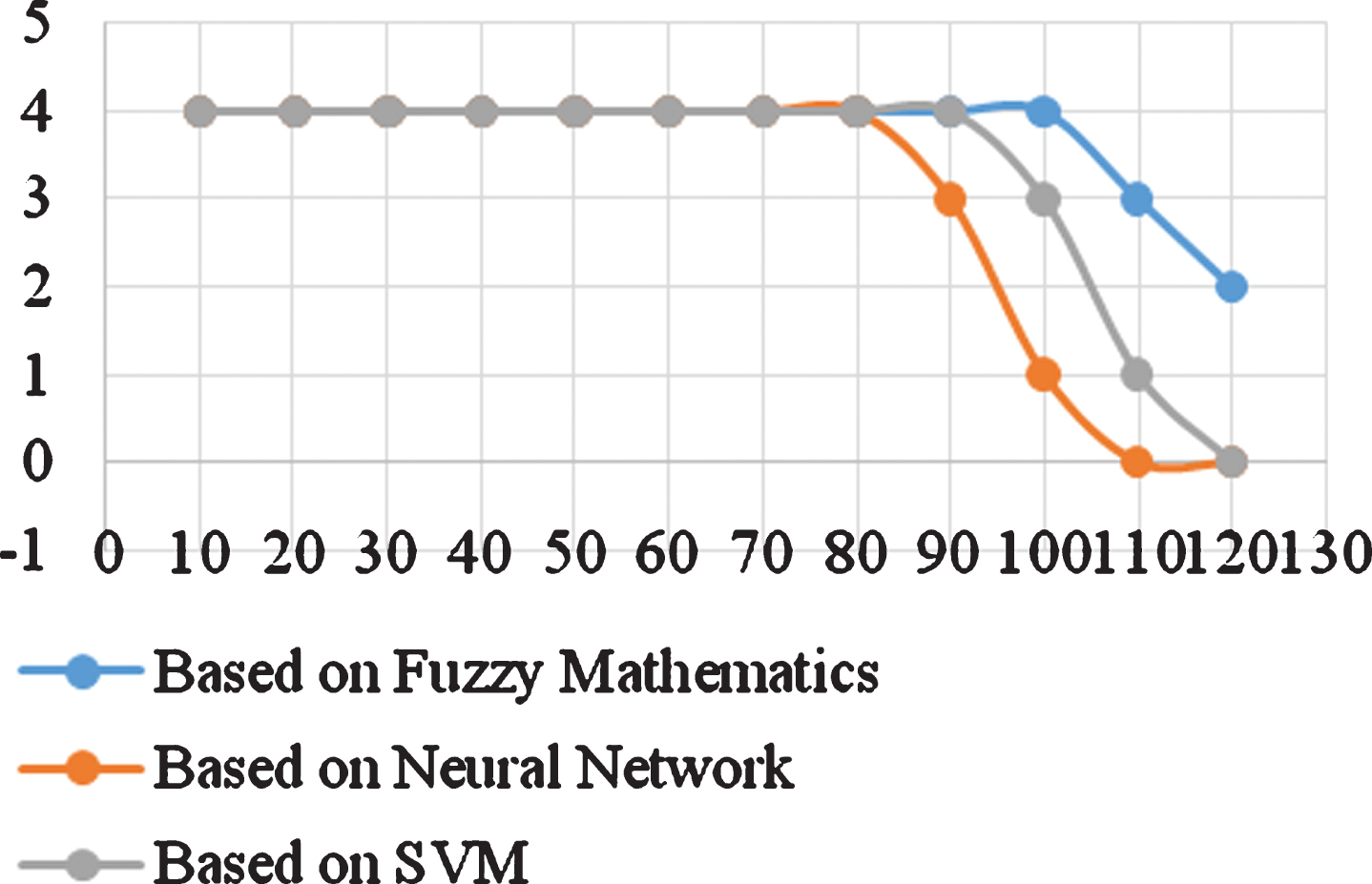
Comparison of recognition distances of three recognition methods.
When using infrared sensors to acquire ship target images, because the texture and geometric features of ship target in the resulting infrared images are not obvious, it is still difficult to detect the target if the imaging quality is low. Therefore, this paper intends to use the fuzzy mathematical model for target recognition of infrared images, in order to effectively identify ship targets, and to extend the recognition distance. Through computer simulation experiments, it is found that:
1) The ship infrared imaging target recognition method based on the fuzzy mathematical model can effectively identify the target, and the recognition rate is very high.
2) Compared with the recognition methods based on neural network and SVM, the recognition distance of the infrared imaging target recognition method based on fuzzy mathematical model is 100M, which is longer than the recognition distance of the latter two methods. Therefore, the recognition method proposed in this paper is better. Effective avoidance of collision risk.
Footnotes
Acknowledgments
This work was supported by Natural Science Research Project of Universities in Jiangsu Province under Grant No. 18KJB580003, 19KJA150005 and 19KJD580001.