
Abstract
With the increasingly close links between provinces and municipalities, the complexity and social connectivity of emergencies have gradually increased. How to realize the rapid and scientific dispatch of emergency resources based on the comprehensive transportation network has become a realistic need. However, due to barriers in management and communication between different administrative regions and different modes of transportation, emergency resource scheduling can only be carried out in the region, and the utilization of integrated traffic channels is insufficient to form a good multimodal transport system. The multi-agent system has strong self-organization ability, learning ability and reasoning ability, which solves problems in the fields of dynamic decision-making and micro-simulation and provides ideas for solving the problem of comprehensive traffic emergency dispatching across regions. In this paper, the multi-agent system is introduced into the research of the task assignment problem of trans-regional comprehensive traffic emergency materials dispatching, based on the traditional bidding rules, the emergency dispatch task assignment rules are proposed and multi-agent trans-regional comprehensive traffic emergency dispatching model based on improved bidding rules is established. The simulation results show that the proposed method can break the regional barrier and form a multimodal transport scheme for emergency materials from the reserve point to the demand point under the minimum generalized time cost, providing decision support for emergency dispatch.
Introduction
In the face of emergencies such as earthquakes, epidemics, terrorist attacks, etc., the relevant departments of the world are dealing with the disaster situation according to the pre-established emergency plan [1–3]. Emergency material dispatching, as the core of disaster relief missions, has always been the focus of research by experts and scholars. The emergency materials dispatching work mainly includes analyzing the demand for emergency materials, assigning rescue teams, and planning transportation routes [4, 5]. The essence of the problem is decision-making and optimization.
At present, for the study of emergency material dispatching issues, scholars mostly take the perspective of “Central Controller” as the starting point, aiming at accelerating emergency response time and reducing disaster losses, establishing scheduling models and using relevant algorithms to solve [6–9]. In addition, some studies have also considered the cost of resource scheduling, as well as the emergency demand point and the state change of the integrated road network during the scheduling process [10–12] in differrent cases. These research results provide a lot of inspiration for the paper in terms of models, algorithms and simulations. The deeper research can be carried out on the following aspects:
(1) There are few studies on trans-regional dispatch of emergency materials. Due to the different scope of responsibility and authorization of the government and functional departments, there is a rigid segmentation of emergency management between regions [13], which also leads to related research mainly for the same region [7], as well as within the city [6]. However, with the development of social economy, the links between provinces and municipalities have become increasingly close, and the complexity and social connection of emergencies have gradually increased. When the scope and destructiveness of emergencies exceed the ability of a single regional response, a scientific and efficient trans-regional emergency linkage mechanism is the basic guarantee for the rapid handling of emergencies.
(2) Only a single mode of transportation, such as highway [7], railway [3,17, 22], or helicopter [9], is not fully considered to utilize the integrated traffic corridor to form an emergency intermodal system. As a connecting channel between regions, the comprehensive transportation network plays an important role in ensuring the timely transportation of relief materials and the timely placement of rescue workers. It is necessary to make full use of the advantages of various modes of transportation to realize emergency resource dispatching in multiple modes of transportation.
(3) The increase in the complexity of emergencies will lead to troubles of large-scale multi-source and multi-sink (“multiple rescue points – multiple demand points”) problems, resulting in a sharp increase in system computing.
The multi-agent system has the characteristics of distribution, autonomy and coordination [14–16], which provides new ideas for solving large-scale trans-regional integrated traffic emergency dispatch problems. In Section 2, we establish an emergency material allocation model based on the bidding rules by analyzing the characteristics of emergency materials dispatching. In Section 3, we describe the rules of the model and the specific behavior of each type of agent, with a focus on how to achieve inter-regional multimodal transport. In Section 4, we study the algorithm and gives examples.
Emergency resources scheduling model based on bidding rules
Multi-agent bidding rule model
In a multi-agent system, each agent learns to improve its own strategy [19, 20] by interacting with the environment to obtain reward values to obtain an optimal strategy in the environment. A multi-agent system can be expressed as (n, A1, A2, ⋯ A n , R1, R2, ⋯ R n ) where n means the number of agents, A i means the action set of the ith agent, and R i explains A1 × ⋯ × A n → R, which represents the reward function of the ith agent. It can be seen from the reward function that the reward obtained by each agent is related to the linkage action [18] of the multi-agent system. The joint action space is named as A1 × ⋯ × A n . V i (Π1, ⋯ , Π i ⋯ Π n ) is defined as the reward of the agent i under the coupling strategy (Π1, ⋯ , Π i ⋯ Π n ), which is also called the value function [21].
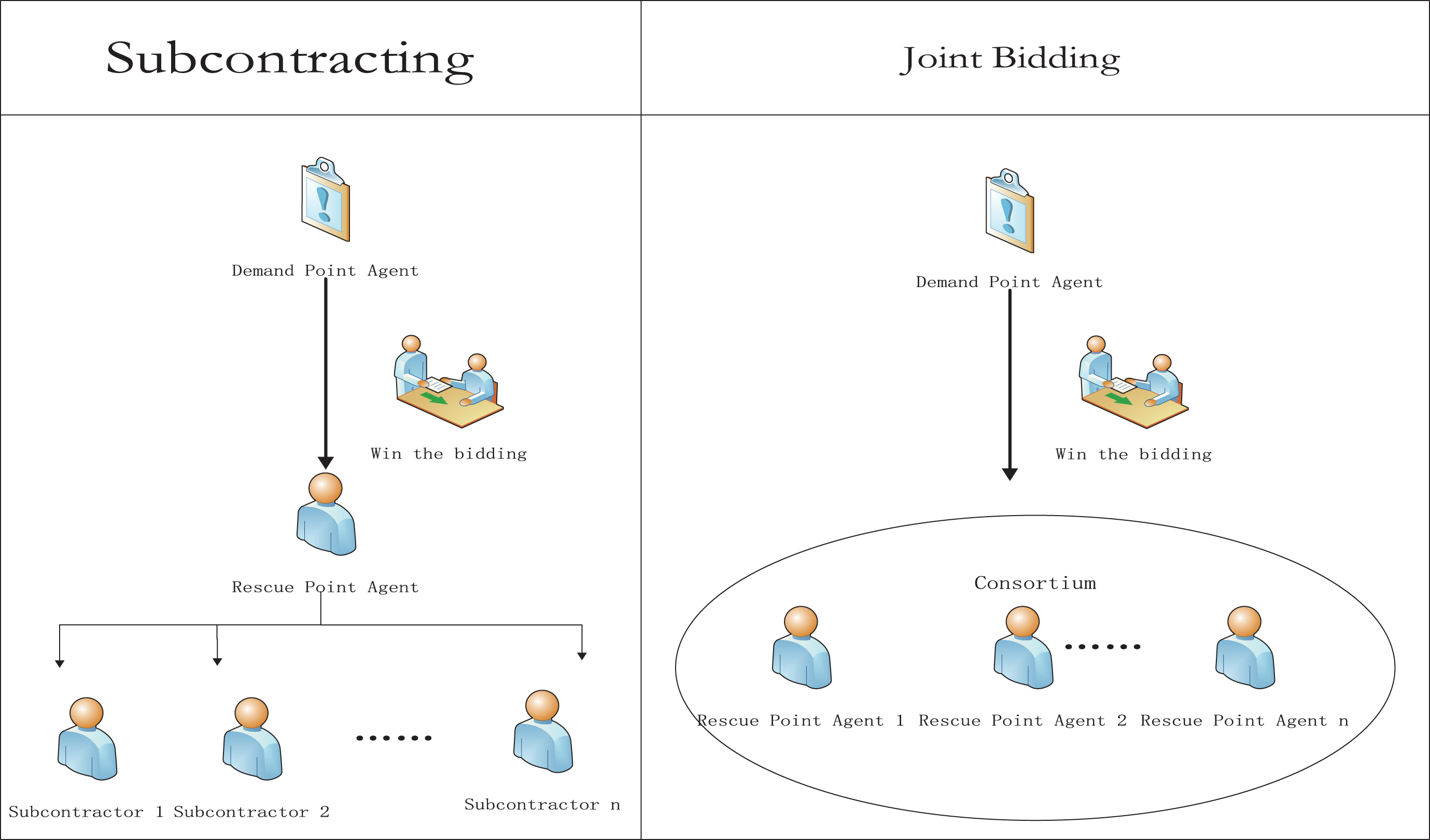
Bidding is a kind of transaction method adopted for contracting and contracting service projects under the conditions of market economy. The bidding strategy is a collection of series of plans to achieve the objectives, including the bidding proposal, bid evaluation method and winning bidding method. Usually, a large project will be split into several tenders and tendered separately. A unit can bid for multiple packages, and multiple targets at the same time, and can also be subcontracted. Multiple units can form a joint venture to bid, and jointly take charge of the project after winning the bid.
In a multi-agent system, the bidding rule model can be described by the following formula (1):
In formula (1), T means a bidding strategy set, A means a bidding agent set, and B means a bidding agent set. The bidding process is a typical dynamic game process. The tenderer mainly focuses on the qualifications and service quality of the bidders. At the same time, considering the bidder’s quotation, the bidder pays more attention to the income and risk, and takes into account the reputation of the company. Therefore, it is necessary to introduce the system comprehensive benefit index F, to measure the status of the multi-agent bidding system.
Appropriate improvement of the bidding rules model can be used to allocate emergency dispatching tasks. The basic model is as follows:
In formula (2):
M means a set of scheduling task objects that need to be completed, M ={ M1, M2, ⋯ , M N };
D means a collection of demand point agents, D ={ D1, D2, ⋯ , D N }, corresponding to the tenderer, responsible for receiving emergency supplies, and there are n demand points;
S means a collection of rescue points, S ={ S1, S2, ⋯ , S N }, corresponding to the bidder, responsible for providing emergency supplies, and there are N rescue points;
C means the set of expenses that the rescue point agent needs to pay to complete the rescue mission,
T means the set of time that the rescue point agent needs to pay to complete the rescue mission,
E means the set of benefits generated by the demand point after receiving emergency supplies,
It can be seen from the above model that C and T are both cost type indicators, so the linear weighting of rescue time and cost can be defined as “generalized time cost” to describe the comprehensive cost generated by the scheduling process. Therefore, the generalized time cost function defining the rescue point agent is as follows:
Therefore, the optimal task allocation scheme in a multi-agent system should satisfy:
The above research shows that for the characteristics of trans-regional comprehensive traffic emergency dispatching, appropriate improvement of multi-agent bidding rules can fully mobilize the autonomy and enthusiasm of each agent, strengthen the communication and coordination between demand points and rescue points, and each rescue points to achieve optimal assignment of tasks.
Emergency dispatch rules
The emergency dispatching process is shown in Fig. 2. The demand point agent decomposes the emergency rescue task into multiple target segments (sub-tasks) and then invites the target. The task of each target segment can be completed by a rescue point agent or multiple rescue points. Each winning bidding agent can also moderately “subcontract” the task to other rescue point agents according to the actual situation and work together.
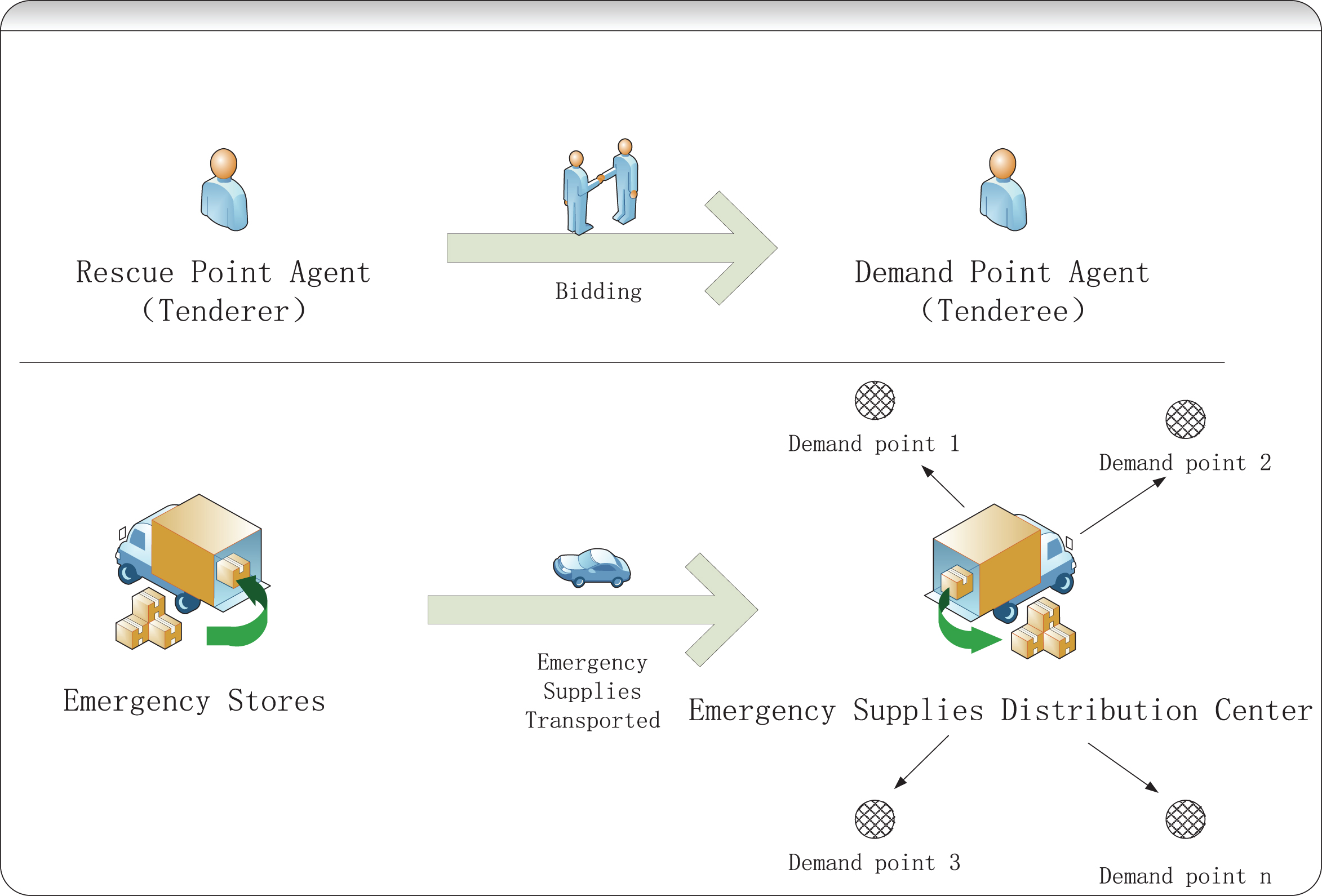
Schematic diagram of multi-agent emergency dispatching model based on bidding rules.
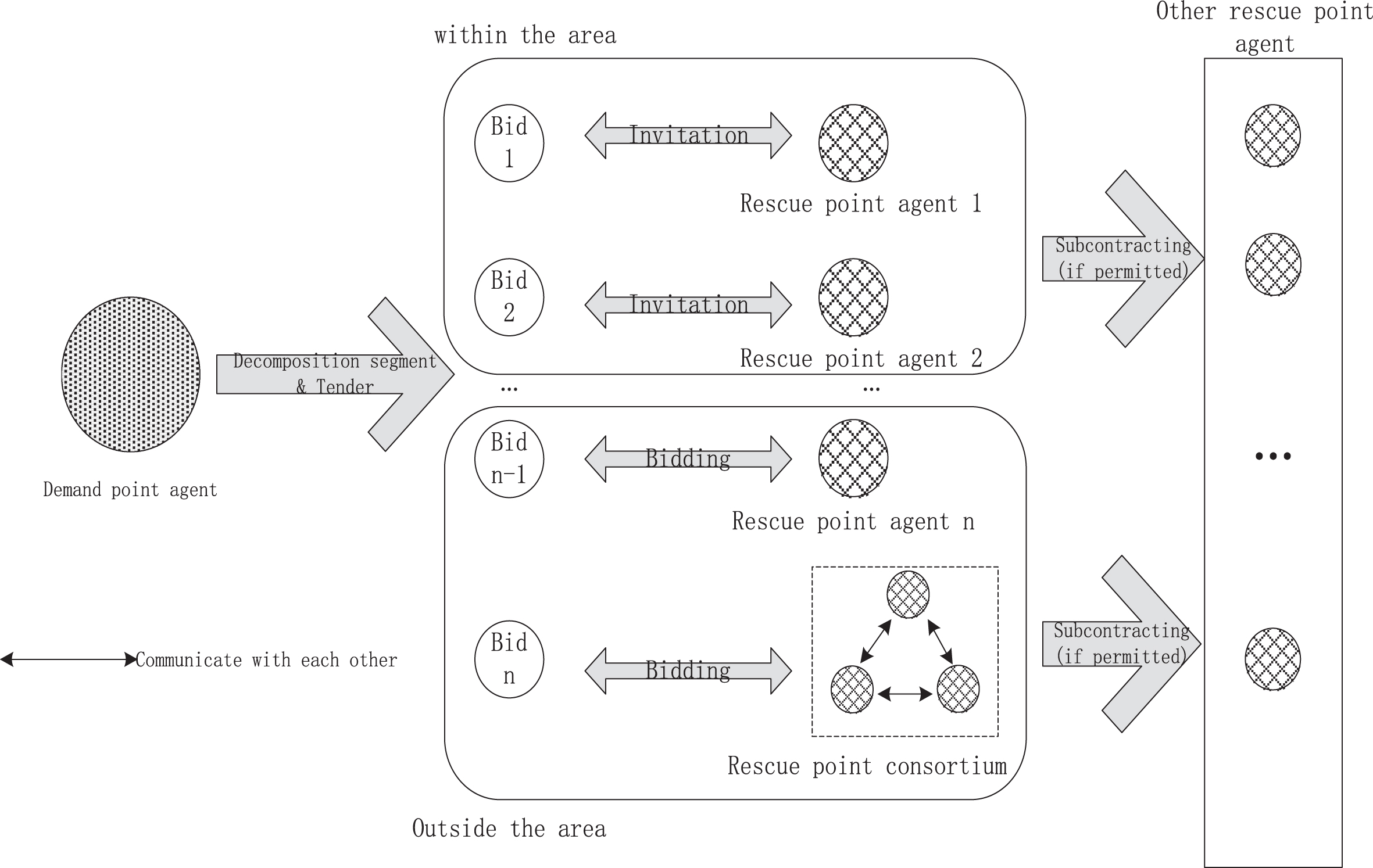
Trans-regional emergency dispatch process based on multi-agent.
Demand point agent workflow
The demand point agent workflow is shown in Fig. 3. After the disaster occurred, the emergency rescue command office will be set up in the disaster-stricken region to generate the demand point agent, count the disaster situation and emergency resources demand information, such as time, place, disaster type, disaster description, resource demand type, resource demand quantity and so on, set the effective time limit Q for emergency rescue, divide the list of emergency resources requirements into a number of “standard sections”, and recruit and invite bids for all rescue points according to the emergency dispatch rules.
Demand point agent workflow.
After the bidding information is issued, the demand point agent receives a number of bidding applications within the effective time limit Q, and the demand point agent selects the “winning bidder” according to the utility function experience value of each rescue point agent, and issues a bid winning notice, and begin to receive emergency supplies for the transportation of the rescue point.
After the bidding information is issued, the demand point agent receives a number of bidding applications within the effective time limit, and selects the winning bidder by evaluating the qualification of each salvage point agent (ie, judging the value of the utility function value), and issues a bid winning notice. The demand point agent begins to receive emergency supplies and continuously adjusts the demand information according to the actual situation until the disaster situation is completely eliminated. After the disaster situation is eliminated, the demand point multi-agent corresponds to the whole process of the emergency disaster, and the utility function value of each rescue point agent participating in the disaster relief operation is given.
As the representative of the Disaster Relief Command Office and the Emergency Material Distributing Center of the disaster-stricken region, the demand point agent collects statistics on the disaster situation and emergency materials demand information based on the comprehensive traffic road network, and the disaster relief task is decomposed into several “standard sections” for bidding and valid time limit is set. The information is described as follows:
<Agent_Tenderee>::=<Basic Information> <Disaster Description> <Requirement Information> <Bidding Rules> {
<Basic information>::=(number, address, railway accessibility, air accessibility, road accessibility, warehouse maximum reserve capacity)
<disaster description>::=(time,<set of disaster points>) {<set of disaster points>::=(number, address, type of disaster, casualty information, responsible unit)}
<Requirement Information>::=(<Responsive Point Collection>, Demand Material Type, Demand Material Quantity)
<Tendering Rules>::=(Principal Division Principle, Inviting Bidding Objects, Open Bidding Objects, Historical Bidding Information, Valid Time Limit)
}
Based on the above information, the demand point agent creates a bidding document as shown in Fig. 4. Among them,<segment task description>::=(required material type, quantity of demanded goods).
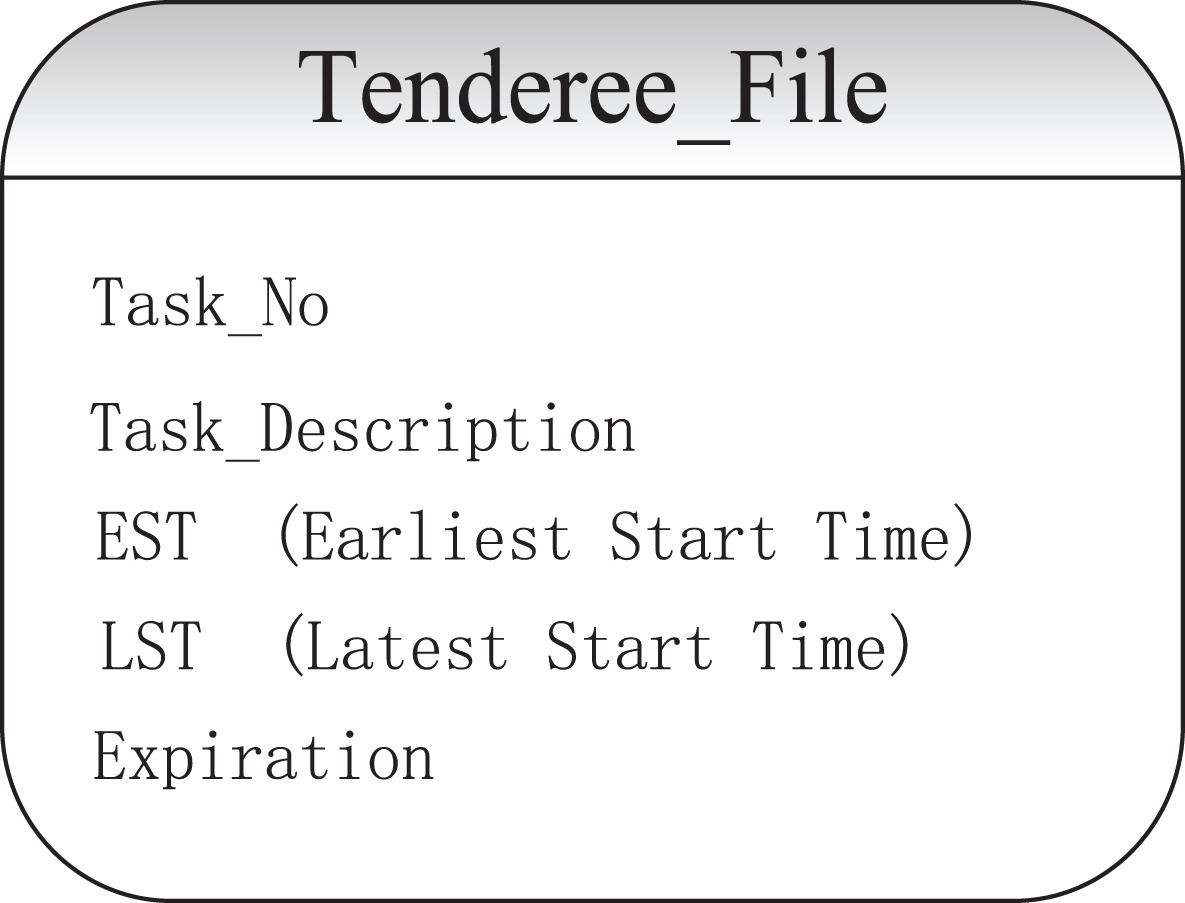
Demand point agent bidding file format.
(1) Task decomposition
Under the emergency, the material distribution center has a large demand for the types and quantities of emergency materials, and needs to be transferred from multiple material reserve points. Based on the types of emergency materials, the task is decomposed into several “standard sections” for bidding.
(2) Public bidding and invitation bidding
The rescue point agent in the region is in principle obligated and necessary to participate in emergency dispatch, so the demand single agent adopts the “call” mode. When the rescue point agent in the same region cannot meet the emergency dispatching demand for various reasons, the demand single agent body faces the open bidding for the rescue point agent outside the region.
(3) Utility function calculation and estimation
The utility function value is an indicator to measure the quality of the bidder’s completion of the task. The calculation of the utility function value is as shown in equation (5). In the initial state of the system, the utility value of each rescue point utility defaults to 0. The utility function value information calculated by each demand point agent is public. The winning point of the successful bidding agent exits for its own reasons, and the utility function will be affected.
In formula (5), q (M j ) represents the amount of resources transported for the task M j , c1 represents the benefit of the relief of the disaster caused by the unit resources, R represents the probability of further expansion to the potential risk, T(M j ) represents the fastest emergency response time for the task M j , c2 represents the unit loss under the condition that the demand point does not receive emergency resources, w1 and w2 are the weight coefficient, and ɛ is the residual.
In the process of bidding, the bidders often receive applications from bidders who have never established a cooperative relationship, so it is necessary to evaluate the qualifications of the bidders. The evaluation is mainly based on the relevant historical data (i.e., the empirical value of the utility function of the emergency dispatching process), and the value of the utility function generated by the bid is estimated by the formula (6). The utility function value estimation method is also applicable to the bidder’s decision behavior.
In equation (6), the execution task
Rescue point agent workflow
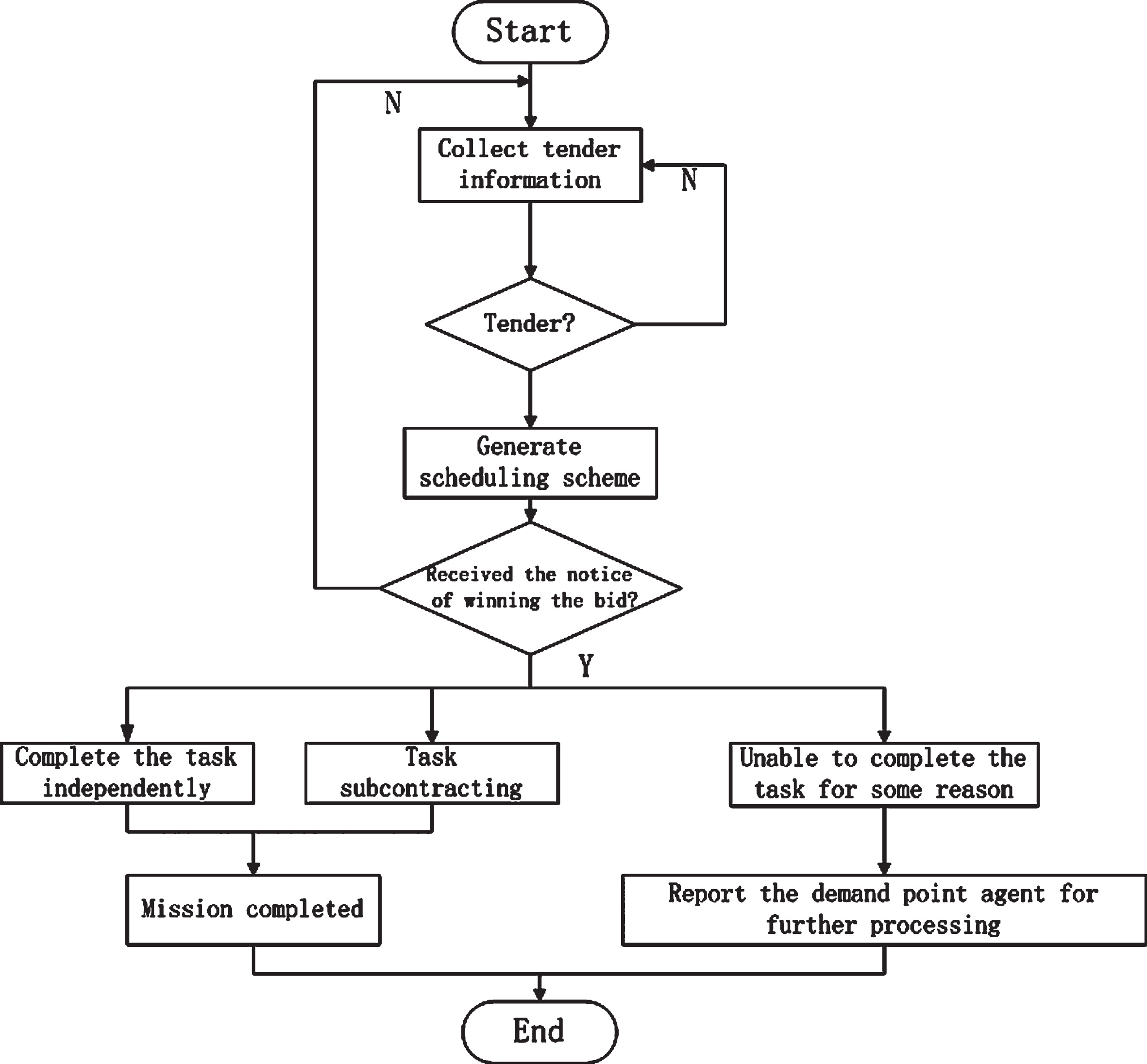
The rescue point agent workflow is shown in Fig. 5. Each emergency material reserve point distributed nationwide corresponds to a rescue point agent. Each agent collects the bidding information within the system, judges whether to bid according to the emergency dispatching rules, determines the bidding and then calculates and calculates the transport path based on the integrated traffic dynamic road network, and obtains the transportation plan and sends it to the demand point agent.

Rescue point agent workflow.
After receiving the bidding notice of the demand point agent, the transportation task can be completed independently, or part of the task can be subcontracted to other rescue point agents. Once the subcontracting is performed, the agent role is transformed into the demand point agent. If the task cannot be completed due to various reasons, the rescue point agent needs to report to the demand point agent in time for further processing.
Equation (8) indicates that the benefit of the rescue point S i execution task M j for the disaster point D i is greater than the generalized time cost paid by the rescue point D i ;
The solution result of equation (9) is the optimal transportation plan for the emergency resources of the disaster point D
i
The rescue point agent needs real-time monitoring and management of the storage materials, and plans the emergency material dispatching and transportation plan based on the comprehensive traffic road network information and the accessibility of each transportation mode. The specific information is described as follows:
<Agent_Tenderer>::=<Basic Information> <Material Reserve Information> <Integrated Traffic Network Information> <Bid Rules> {
<Basic information>::=(number, address)
<Material Reserve Information>::=(Material Type, Quantity of Materials)
<Integrated traffic network information>::=(railway accessibility, road accessibility, air accessibility, single maximum transport capacity)
<bid rules>::=(historical utility library)
}
Based on the above information, the rescue point agent creates a bid file as shown in Fig. 6. The bid documents containing subcontracting/joint activities should be detailed in the Note column.

Rescue point agent bidding file format.
(1) Apply for bidding
The rescue point agent continuously collects various bidding documents issued by the demand point agent in the system. First, according to the formula (5) of 3.3.3, the benefit (ie, the utility function value) generated by participating in the bid is estimated. If the benefit value is greater than the generalized time cost incurred in participating in the task (ie, satisfying formula (10)), then the bid is involved.
(2) Generate integrated traffic scheduling plan
After the bid is determined, the rescue point agent is based on the comprehensive dynamic road network and the accessibility of each mode of transportation, and plans the transportation plan from the emergency material reserve point to the emergency material distribution center according to formula (7). The utility function estimate is determined by 3.3.3 (10), and the calculation formula of cost in the generalized time cost is as shown in equations (12) and (13), respectively.
The formulas (12) and (13) means that the rescue point agent intelligently supplies the quantity of resources in the m-th position to the demand point j;
(3) Task subcontracting
After the rescue point agent wins the bid, the task is further decomposed under the premise of ensuring that the agent completes the maximum proportion of the task, and the remaining task amount is subcontracted to other rescue point agents. At this point, the rescue point agent will perform the workflow of the demand point agent as the “tenderer” and bid for other rescue points in the system. The winning point of the winning bid agent is only allowed to be subcontracted once.
(4) Forming a joint venture
For the bidding task issued by the demand point agent, multiple rescue points can form a “joint bidding body”, negotiate the amount of tasks undertaken by each agent, and bid. The optimal task allocation scheme between the rescue points in the joint venture should satisfy the formula (14). n is the number of rescue points in the joint venture.
Through the above improved multi-agent game rules, a multi-agent-based trans-region integrated traffic emergency dispatch task assignment method can be established. The algorithm steps are as follows:
Step 1: Locate the location of the demand point and obtain information such as the accident level, accident casualty, and the start and end point of the accident;
Step 2: Determine the number of resource types required by the demand point and the storage amount of the rescue point;
Step 3: Set the rescue point set, S ={ S1, S2, ⋯ , S N }, set the demand points, D ={ D1, D2, ⋯ , D N };
Step 4: According to the bidding result, select m suitable rescue points, and let i = 1;
Step 5: According to the congestion degree and accessibility of various transportation modes from the rescue point to the demand point, generate n transportation combinations for the selected rescue points, and let j = 1;
Step 6: Obtain the optimal path of the ith resource point in the jth transport mode. If the ith resource supply point is reachable, let j = j+1, otherwise return to step 1;
Step 7: If j > n, let i = i+1, otherwise return to step 3;
Step 8: If i< =m, return to step 2. If i > m, the resource scheduling scheme under each transport combination mode is obtained, and the algorithm ends.
Experimental simulation
Simulation model parameter type
The model parameter types are as shown in Table 1.
Input parameter types of the simulation model
Input parameter types of the simulation model
To verify the validity of the model, we take the case of an oil storage tank explosion in Qingdao, Shandong Province, China. After the incident, the demand point agent releases real-time demand information, which requires 495 units of Class A resources, 845,000 units of Class B resources, and 75 units of Class C resources.
The parameters such as the location of the rescue point agent and the type and amount of resources stored are as Table 2:
Rescue point agent information table
Rescue point agent information table
According to the algorithm given in Section 2, do the following steps: The demand point agent releases the bidding information according to the type of demand materials and the sub-segment; The demand point agent invites the target to the rescue point of the same region (ie, within Shandong Province). Out-of-the-box agents in the region need to maximize the transportation of demanded goods; Under the premise that the demand point agent in the same region meets the material demand to the maximum extent, calculate the benefit value and the generalized time cost of each rescue point agent outside the region participating in the task; Screening all the schemes that conform to formula (10), and sorting them in descending order according to the size of the values; Add the transportation amount given by each scheme in turn until the demand is met. The rescue point agent distributed throughout the country rescues according to the emergency dispatching rules, and finally concludes that the comprehensive traffic emergency dispatching plan is shown in Table 3. The schematic diagram of the scheme is shown in Fig. 8.
Simulation experiment results
Task subcontracting and consortium venture.

Schematic diagram of the simulation scheme.
In this paper, based on the characteristics of trans-regional integrated traffic emergency dispatch, an improved multi-agent model based on game rules was introduced to distribute emergency dispatching tasks. The experimental simulation showed that the model can simulate the dynamic decision of the rescue point and demand point in the emergency dispatching process, which had certain reference.
The main contributions of this paper are as follows: Introducing a multi-agent system, allowing the rescue point and demand point to communicate and coordinate the emergency material dispatching plan independently, thus replacing the role of the traditional “Central Controller” and reducing the system operation and operation dimension; Through the bidding rules, mobilizing the initiative and enthusiasm of each rescue point for the rescue of the rescue body, so as to realize the trans-regional dispatch of emergency materials; Based on the comprehensive transportation network, considering multiple modes of transportation to achieve multimodal transport of emergency materials.
Footnotes
Acknowledgments
This research was supported by the National Key R&D Program of China (2016YFC0802208), National Natural Science Foundation of China (Project No. 61703351, 71971182) , Sichuan Science and Technology Program (Project NO. 2018RZ0078, 2019JDR0211), Science and Technology Plan of China Railway Corporation (Project No.: P2018T001, K2018X012, N2018X006-01).