
Abstract
This paper considers a new fuzzy sliding mode control (NFSMC) of a 7 Degree of Freedoms (7-DoF) upper-limb exoskeleton robot. The proposed exoskeleton robot has a complex structure, an appropriate control method should be chosen for this robotics system. Therefore, a new sliding mode controller (NSMC) is applied for controlling of this robot conveniently. For this task, a novel sliding surface is selected, which is robust against external disturbances and unknown dynamics such as friction forces, different upper-limb’s mass, backlash, and input saturation. In order to improve the control method, fuzzy control is applied. Simulation results clearly validates that the proposed control method has some advantages such as high trajectory tracking, robustness, and zero tracking error.
Introduction
When people experience a stroke, they are not freely able to move their body appropriately in order to perform daily tasks such as eating, walking, and washing. Therefore, a new mechanism should be designed to help them in order to overcome the aforementioned problems. Scientists have widely used and proposed different structures for patients who suffer from stroke. An upper-limb exoskeleton robot can be considered as one type of bio-robotic device which can help people who are unable to move their hands in the desired path. Designing a control law for this type of robot in order to perform tasks in the desired tracking path is a significantly difficult task in different upper-limb exoskeleton structures [1]. Li et al. [2] proposed a new rehabilitation robotic exoskeleton. They considered a multi-model control method for rehabilitation robotic exoskeletons, which improved the stability of the overall with the proposed controller. Yu et al. [3] proposed Human-Robot interaction control of rehabilitation robots with elastic actuators.
Different control method can be applied on an exoskeleton robot such as using a fractional order operator [4–6] or a fuzzy neural system [7], but sliding mode control (SMC) law is robust against external disturbances and unmodel dynamics. Also, it has high trajectory tracking performance [8, 9]. Therefore, choosing an appropriate sliding mode surface can be considered an important step of SMC design. Pan et al. [10] proposed a continuous SMC compliant robot arm. The proposed control method achieved high precision tracking performance. Pan et al. [7] proposed an integral sliding mode control in order to reduce the chattering phenomenon without the degradation of tracking performance. Wang et al. [12] provided a robust SMC for robots driven by compliant actuators. Experimental results validated that the proposed controller has high trajectory tracking, with a robust controller that is able to suppress external disturbances [13]. Fellag et al. proposed a SMC control for an upper-limb robot, with simulation results that indicated the proposed SMC is an appropriate control method in terms of high tracking performance and robustness against external disturbances [14]. Rahman et al. described a nonlinear SMC method to maneuver an upper-limb exoskeleton robot in the process of providing different passive rehabilitation exercises. Experimental results demonstrated that the proposed control method is conveniently able to provide passive rehabilitation therapy [15]. Beyl et al. used a pneumatics structure for control of a bio-robot. A proxy-based SMC was applied, which can provide an accurate tracking ability [16]. Babaiasl et al. designed an exoskeleton robot for shoulder joint rehabilitation. SMC is implemented in order to have a convenient performance for investigation of the robot’s ability to track the desired trajectories. All SMC parameters are tuned with a genetic algorithm [17]. Brahmi et al. proposed a robust nonlinear control technique based on the backstepping method for an upper-limb exoskeleton robot in order to develop passive rehabilitation therapy for people who are unable to move their upper extremities. The controller’s purpose was to be robust against external disturbances such as user’s force [18]. As a result of these works, SMC creates a chattering phenomenon in varying amounts according to characteristics of the structures, which can be considered one of the main drawbacks of the SMC. Therefore, an appropriate combined control system should be designed in order to improve the control performance.
Fuzzy control technique is one of the most efficient tools that can be chosen in order to improve control performance [19–21]. It need to be designed by experts who have enough information about the features of the system. Therefore, they can choose suitable rules and membership functions in order to design it in the best way. Yang et al. proposed a command filter adaptive fuzzy backstepping control method for an exoskeleton robot. Fuzzy logic systems approximated the uncertainties and disturbances in order to solve the chattering phenomenon [22]. Wu et al. described a modified proportional integral derivative (PID) sliding surface for a bio-robot in order to guarantee the robustness of the proposed control law [23]. In addition, a fuzzy control method was applied to reduce the chattering phenomenon. Jin et al. introduced an improved single-input fuzzy sliding mode control (FSMC). Also, in order to enhance tracking performance regarding system uncertainties, an adaptive switching controller is combined with FSMC [24]. Wu et al. proposed a new FSMC in order to control an upper-limb exoskeleton robot. The experimental results illustrated that the proposed controller has effective performance [25]. Fahamy and Ghany proposed a novel neuro-fuzzy inverse model control strategy for robotic manipulator control used in physiotherapy applications [26]. Consequently, designing a FSMC is a particularly difficult task because an appropriate sliding surface needs to be selected and a fuzzy logic system needs to be adjusted for the robotic structures. If fuzzy control rule choose appropriately, chattering phenomenon will be reduced noticeably.
This study proposed a novel sliding mode surface in order to enhance the performance of the NFSMC. A fuzzy logic algorithm is applied in order to improve control performance. According to the complex structure of a 7-DOF upper-limb exoskeleton robot, convenient rules and membership functions are proposed.
This paper is organized as follows. In Section 2, model dynamics description of the 7-DOF exoskeleton robot is presented. In Section 3, the NSMC is included. In Section 4, NFSMC is included. Section 5 describes the simulation results. The conclusion is discussed in section 6.
Dynamic modeling of the ETS-MARSE
The kinematic model of the upper-exoskeleton robot, ETSMARSE, used in the current research is shown in Fig. 1. According to Fig. 1, glenohumeral joint includes joints 1, 2, and 3 (i.e, shoulder joint), where joint 1 describes horizontal flexion/extension, joint 2 considers vertical flexion/extension, and joint 3 represents internal/external rotation of the shoulder joint. Apart from the glenohumeral joint, joint 4 is located at a distance de (length of humerus). Joint 4 is considered to represent flexion/extension of the elbow joint. Joint 5 describes pronation/supination of the forearm. According to Fig. 1, at a distance dw joints 6 and 7 intersect (wrist joint). Joint 6 represents radial/ulnar deviation, and joint 7 considers flexion/extension.
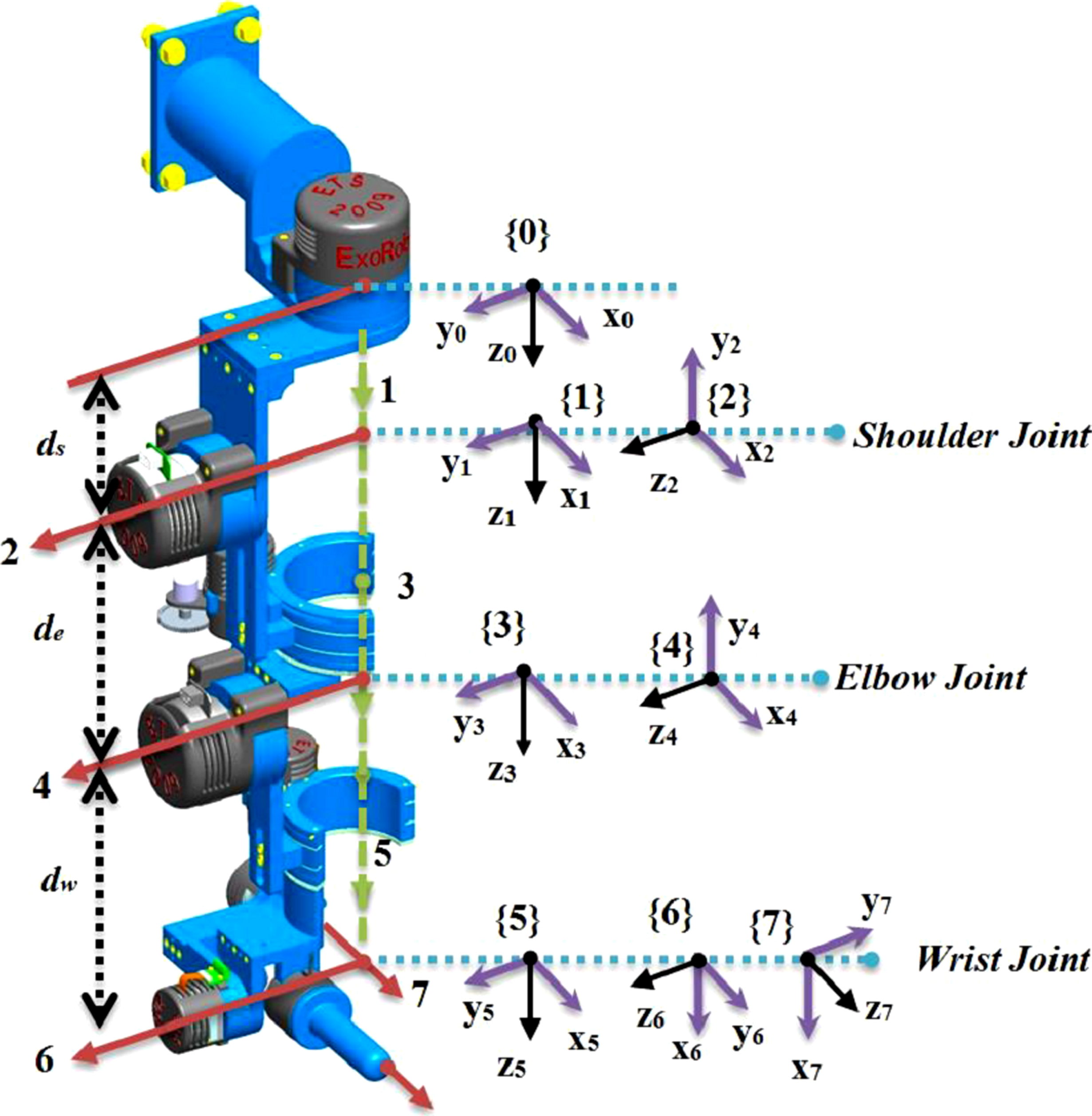
Reference frames of ETS-MARSE [9].
The dynamic equation of the Motion Assistive Exoskeleton-robot for Superior Extremity (ETS-MARSE) (Fig. 1) in the joint space is defined as follows [27–29]:
τ ∈ R7 is the torque input vector, E (t) ∈ R7 is the external disturbances vector, and
Equation (2) can be denoted as follows:
As a result of this, Equation (3) can be rewritten as follows:
Equation (4) can be defined as:
SMC have been widely used in robotic systems because it is robust against external disturbances. The most important part of designing a SMC is choosing an appropriate sliding mode surface, where the control method will slide along a defined surface [30]. Therefore, a sliding mode surface should be chosen according to the structure of the system.
ETS-MARSE robot has a highly complex structure, where the new sliding mode surface can be denoted as:
When the system state is far from the equilibrium state, sub-item
In addition,
The tracking error is defined as follows:
By taking the derivative of the sliding surface with respect to time, equivalent control can be obtained by the following steps as:
Substitute Equations (4) into (8) generates
The equivalent control can be obtained by
It can be seen that the equivalent control effort cannot ensure effectiveness of the performance due to parameter variations and external disturbances that occur. Knowing this, an auxiliary control effort needs to be designed in order to compensate for this problem. The Lyapunov function can be defined for this issue as shown below:
The Lyapunov function needs to be selected in order to solve this problem as follows [31–34]:
By proposing a condition, it guarantees that the control technique is stable:
The reaching condition can be satisfied by completing the equivalent control u
eq
(t) given in Equation (10) through adding us(t) as follows:
By using Equation (12), the reaching control signal (u
s
(t)) generates
By using
Substitute Equation (5) into Equation (15) produces
Substitute Equation (13) into Equation (16) generates
Substituting Equations (10) into (17) generates
We need to show Equation (18) is less than zero by choosing an appropriate reaching control law as:
Substitute Equations (19) into (18) generates
Fuzzy logic system is a strong tool for engineering applications. It can be effectively used in control engineering systems to help solve various problems [34]. By combining the fuzzy control and SMC, a highly convenient hybrid control law can be obtained. Fuzzy control play an important role in order to eliminate the chattering phenomenon created by SMC. Design of a NFSMC has always been a challenge for designers because they need to select rules and membership functions accurately in order to achieve a highly effective control method, which NFSMC method block diagram is illustrated in Fig. 2. In this study, after proposing a new SMC law for a highly complex 7-DOF upper limb exoskeleton robot, new rules and membership functions need to be chosen for an ETS-MARSE robot.

Block diagram of proposed control system.
The reaching law can be defined as:
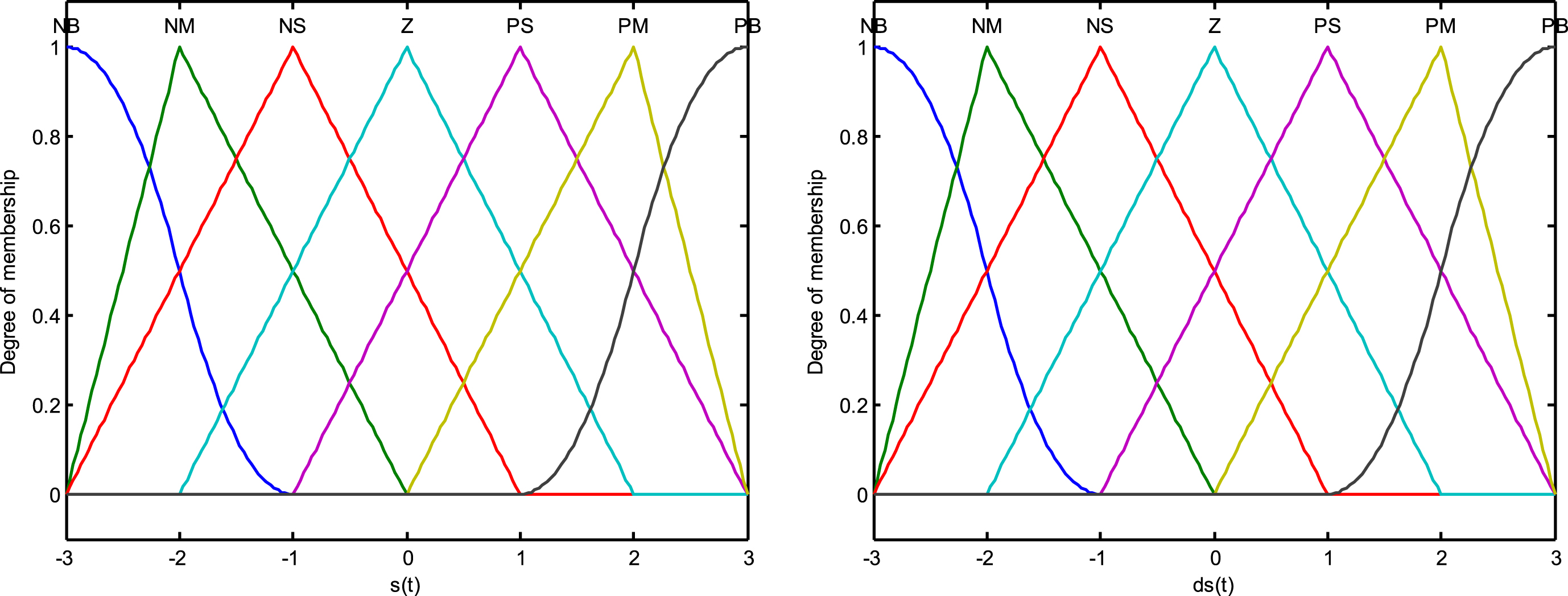
Fuzzy sets of new sliding surface s (t) and derivative of new sliding surface
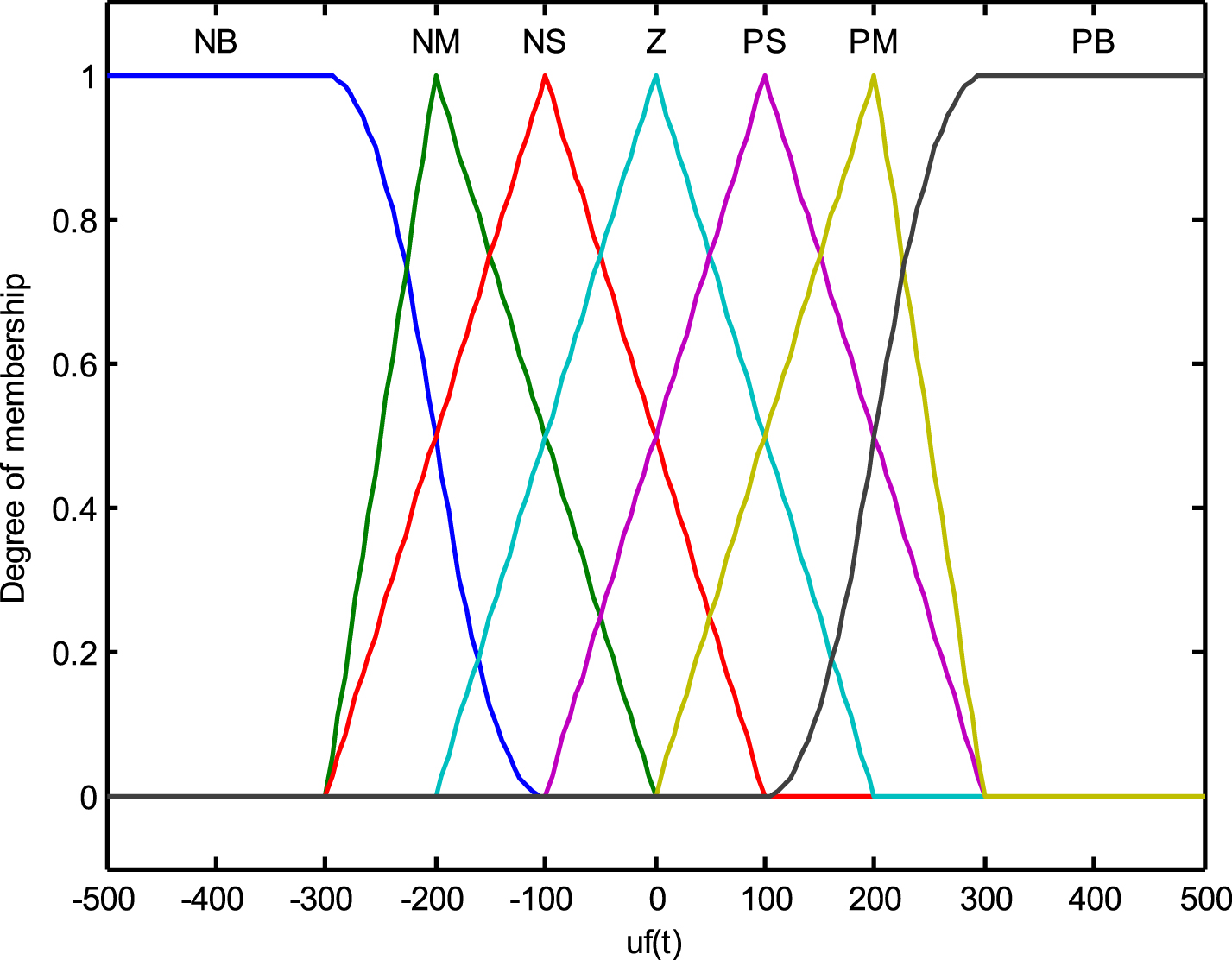
Fuzzy sets of reaching control u f (t).
Where
The number of the fuzzy IF-THEN rules are described as l = 1, 2, …, m.
For the fuzzy implication, the intersection minimum operation has been used, the center average defuzzification procedure has been chosen [37].
Table 1 demonstrates the fuzzy rule. In fact, the NFSMC can be defined as follows:
Rule matrix of NFSMC
The stability of the proposed control method can be proven by Lyapunov theory as follows:
By taking the derivative of Equation (24), it can be shown as below:
Equation (26) can be written as:
Substitute Equations (10) into (27) generates
Simplifying Equation (28) results in
As a result of this, Equation (29) can be denoted as:
In order to
The simulations have been done in order to show the effectiveness of the NFSMC on an upper-limb 7-DOF exoskeleton robot. Physical parameters of ETS- MARSE are shown in Table 2. All simulations were carryed out by Matlab software by using the ode45 function. In order to demonstrate the effectiveness of the proposed control method, sin(t) selected as a desired trajectory for all joints. Also, the initial position for all joints are included as θ1 (0)=θ2 (0)=θ3 (0)=θ4 (0)=θ5 (0)=θ6 (0)=θ7 (0)=0. The propsed controller parameters are selected as follows:
Physical parameters of ETS- MARSE
Physical parameters of ETS- MARSE
λ = diag {7, 7, 7, 7, 7, 7, 7} , β= diag{2,2,2,2,2,2,2}, γ= diag{30,30,30,30,30,30,30}, K s = diag{6,6,6,6,6,6,6}, and K f = diag{0.5,0.5,0.5,0.5,0.5,0.5,0.5}.
Figure 5 shows tracking position of joints under conventional integral sliding mode control (CISMC), NSMC and NFSMC. The goal is to achieve high tracking performance by using the new control method in comparison with NSMC. According to Fig. 5, NFSMC has high trajectory tracking, and is able to track the desired trajectory better than CISMC and NSMC. Figure 6 illustrates the tracking error position of joints under CISMC, NSMC and NFSMC. The membership functions and rules in NFSMC have been accurately designed, which is shown by the improved control performance. As seen in Fig. 6, by implementing NFSMC, maximum overshoot has been considerably reduced. Figure 7 shows the velocity of joints under FSMC and NFSMC. In addition, input control torque is illustrated in Fig. 8.
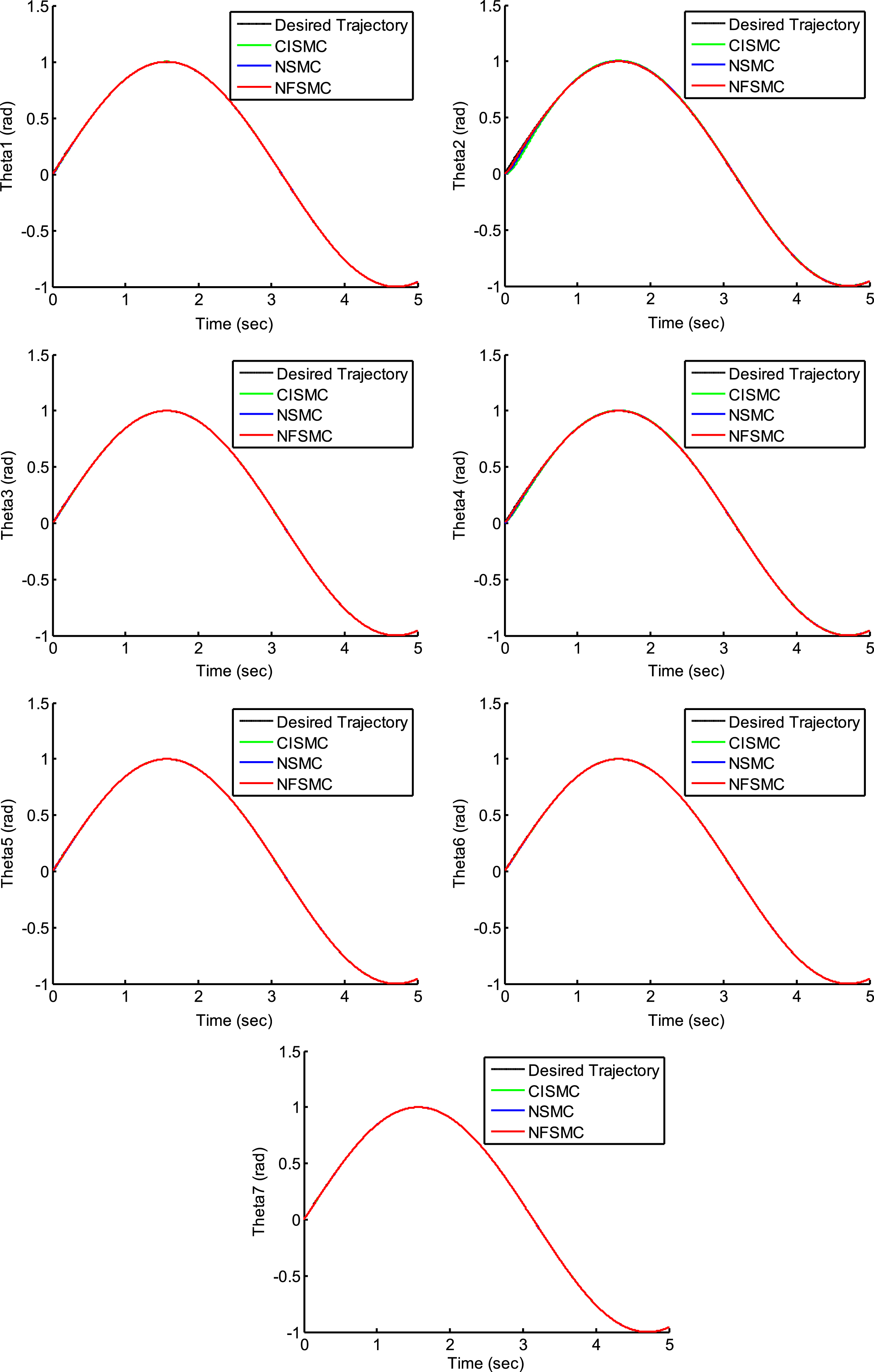
Position tracking of joints under CISMC, NSMC, and NFSMC.
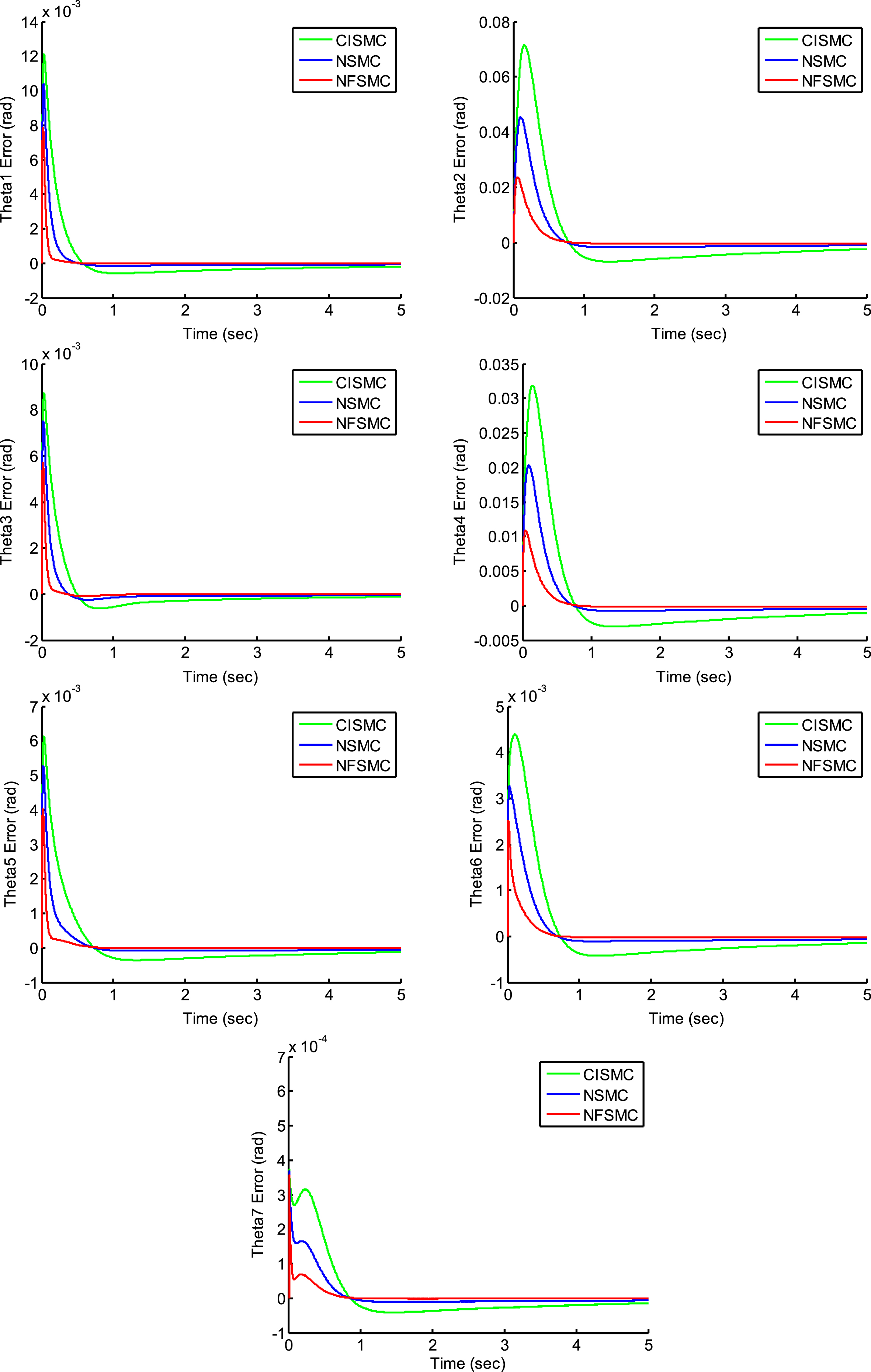
Position tracking error of joints under CISMC, NSMC, and NFSMC.
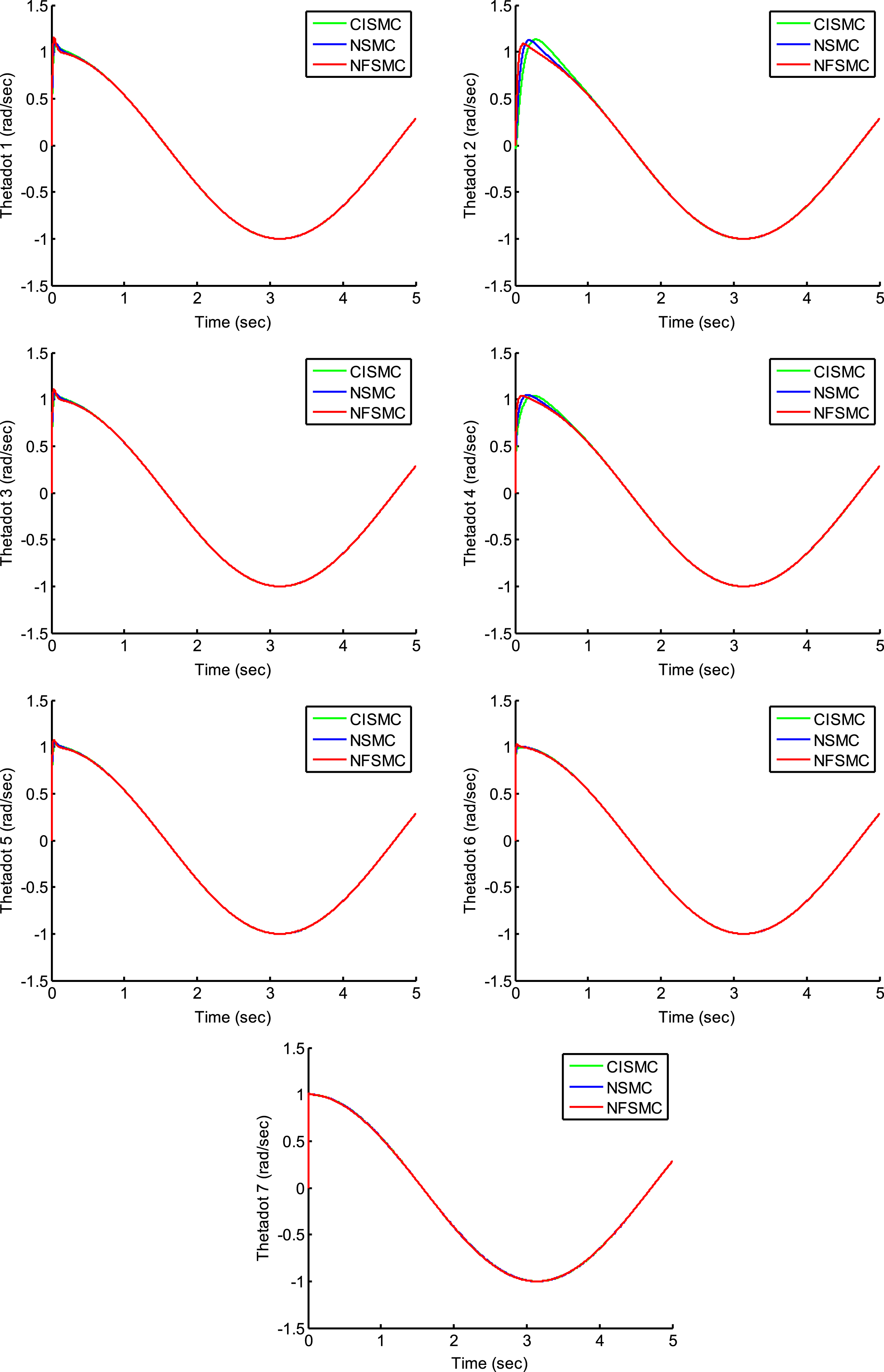
Velocity of joints under CISMC, NSMC, and NFSMC.
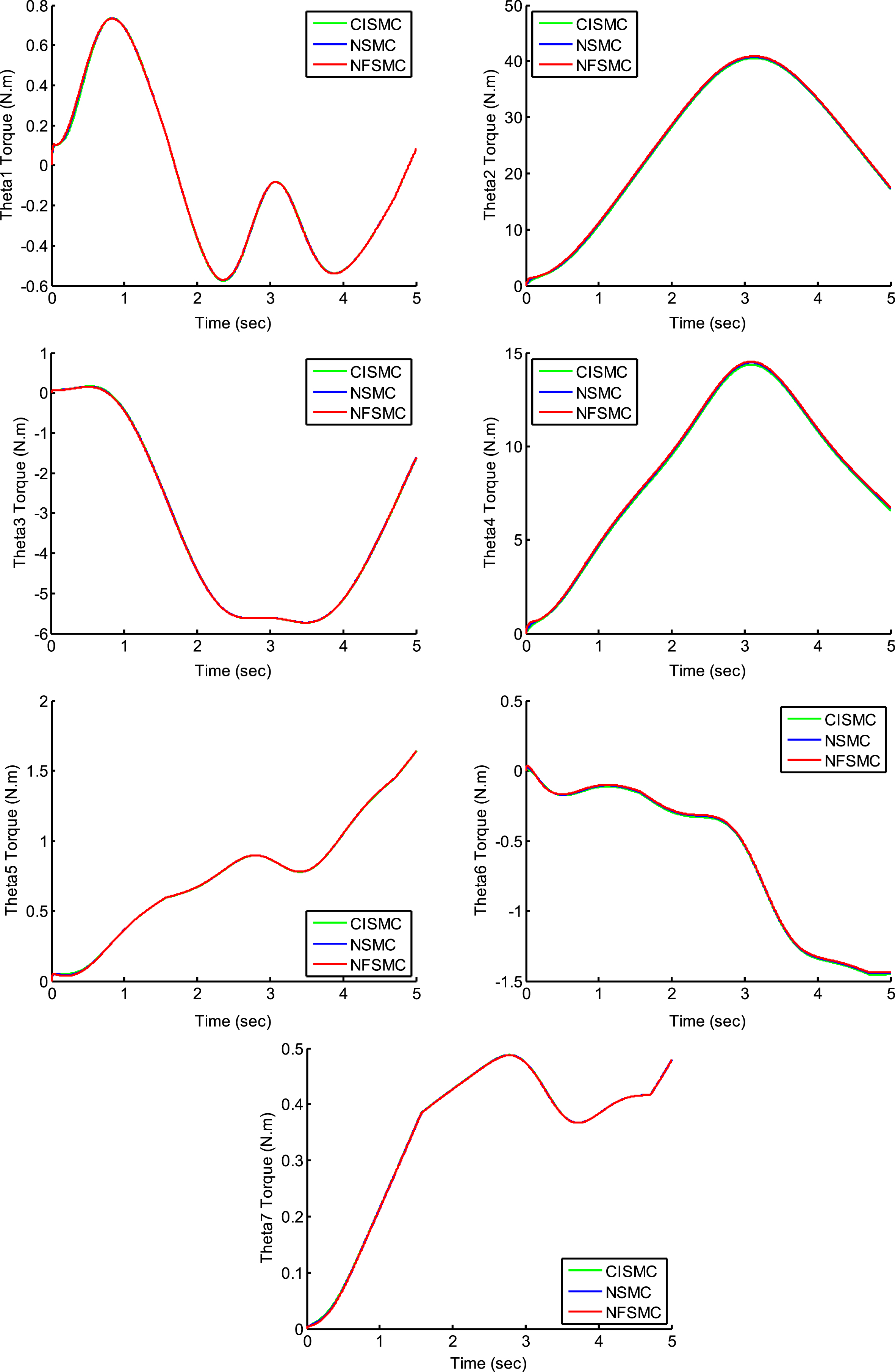
Control effort using CISMC, NSMC, and NFSMC.
This paper proposed a NFSMC of an upper-limb exoskeleton robot. The exoskeleton robot has a highly complex structure, which constantly encounters unknown dynamics and external disturbances. A NSMC is proposed that is robust against these external disturbances. In order to remove control performance, a NFSMS is proposed. All membership funtions and rules are selected appropriately for the proposed fuzzy control method. Simulation results validated the effectiveness of the proposed control method in terms of high tracking performance, low maximum overshoot, and low undershoot. However, future work should be devoted to the implementation of the proposed control method experimentally for the rehabilitation of patients.