
Abstract
A method for image edge detection is proposed, which employs interval-valued fuzzy (IVF) sets such that each pixel has an interval membership constructed from its original and neighboring intensities. This method relies on triangular norms and co-norms to develop operators generating lower (LIB) and upper (UIB) interval bounds, which are employed in a novel membership function. This membership function is then applied to the image represented as fuzzy singletons to generate an image containing the edges associated with the original image. The proposed method is applied to medical images for edge detection and the results are compared with those obtained based on application of other fuzzy methods as well as a classical method for implementation of edge detectors. The quantitative comparison of the edge binary images determined by each method is performed by employing a metric based on the Hausdorf distance as well as a metric based on the local refinement error known as global consistency error (GCE). The proposed method consistently produced lower values of Baddeley’s Delta metric as well as lower values of GCE. The proposed method was also characterized by values of Pratt’s figure of merit closer to unity as compared with the other methods. Furthermore, the proposed method outperforms a number of commonly employed edge detectors in terms of the processing time required for edge detection.
Introduction
Edge detection is one of the basic methods employed in image processing. This function, which may be employed for image segmentation, can serve a number of different purposes such as extraction of edges for object identification in the image and detection of changes in material properties. A number of different methods for image edge detection [1] such as the Gaussian-based method [2], and the geometric approach [3] have been presented to date. While these algorithms provide a suitable framework for edge detection, they require time-consuming calculations. Among the various edge detection algorithms, the Canny’s method is believed to consistently outperform other operators. The Canny’s algorithm, however, is computationally more demanding [1] compared with conventional edge detection methods such as the Laplacian of Gaussian (LoG), and the methods advanced by Sobel, Prewitt and Robert. Therefore, development of methods enabling accurate real-time edge detection continues to be of fundamental interest in image processing. In recent years, fuzzy-based algorithms for edge detection have gained considerable attention on account of their computational efficiency [4–8]. While fuzzy edge detection schemes offer low processing times, dedicated methods intended to enhance the processing speed of edge detection have also been advanced. In particular, an approach based on the template of vertical in Sobel operator [9] with applications in moving detection and automatic vehicle identification, a fast edge detection algorithm using binary labels based on Mumford-Shah functional [10], and fast image edge detection based on the Faber Schauder Wavelet have been advanced [11].
Fuzzy techniques are, however, particularly well-suited for edge detection, since in general application of fuzzy sets can serve as an effective approach for evaluation of given data elements along with the contextual information contained in neighboring data [12–14]. Recent fuzzy-based approaches include the a powerful type-2 fuzzy logic method for edge detection intended for color format images proposed by Melin et al. [15] which combines the image-gradient methodology and the general type-2 fuzzy logic theory.
Fuzzy set theory has been extensively employed to address theoretical [16] as well as applied [17, 18] problems involving uncertainty. Digitized medical images, in particular, include a considerable degree of uncertainty stemming from the limitations associated with the discrete gray scale employed in the codification process to fit the samples obtained from the analog image into a pixel matrix. More recently, a promising method for edge detection in noisy clinical images has been proposed, which utilizes a 3×3 mask guided by a set of fuzzy rules in noisy images [19]. The loss of information contained in the real-world image is a consequence of the uncertainties inherent in the digitization process. Application of Fuzzy set theory [13], therefore, can serve as an important tool in image processing [3, 21]. Noteably, a recent investigation by Perez-Ornelas et al. [19] advance a fuzzy index for edge detection forgoing binarization, which allows processing of all detectable edges with all computations performed using fuzzy set operators. Employment of fuzzy sets provides an effective approach to edge detection, since it allows the structural information associated with given pixels to be considered in relation to that conveyed by neighboring pixels [22].
In this work, a method for image edge detection is proposed, whereby the image is represented by fuzzy singletons from which an image containing the edges is produced through application of a novel membership function. Development of operators based on this membership function is presented and the key advantages of the proposed method, namely reduced sensitivity to noise and low computational cost are demonstrated. The performance of the proposed method for edge detection is quantitatively compared with those of a non-fuzzy method employing morphological filtering [23] as well as a fuzzy method [24] by applying each method to several different medical images. Specifically, the performance of each method is quantified through comparison of binary images based on well-known metrics, namely the Hausdorff distance and a metric based on the local refinement error known as global consistency error [25]. In addition, using the Pratt’s figure of merit (FOM) the performance of the proposed edge detector in presence of Guassian noise is compared with those of edge detectors developed based on the W-Fuzzy, the morphological filtering and the Laplacian of Guassian(LOG) methods as well as the methods advanced by Canny, Sobel, Perwitt. Finally, the computational cost of the proposed method is compared with that imposed by the latter methods.
Materials and methods
The proposed method for edge detection will be rigorously developed herein. Specifically, relevant mathematical constructs as well as proofs will be provided and the operators enabling fuzzy edge detection will be developed. A novel membership function is introduced which allows extraction of the edge image using a fuzzy-singleton representation of the original image. This membership function employs triangular norms and co-norms to develop operators generating lower (LIB) and upper (UIB) interval bounds, associated with the interval representing the variation between the membership degrees of the given pixel and its neighbors in the original image.
Relevant mathematical constructs
A review of the definitions and theorems relevant to fuzzy relations, on which the proposed method is based, is presented in this section.
In this work, only strong negation functions will be addressed. A strong negation function is an involutive, strict negation function. A strict negation function, in turn, can be defined as a strictly decreasing and continuous function N : [0, 1] → [0, 1] with N(0) = 1, and N(1) = 0.
The complement A
N
of a fuzzy set A can be define as follows
Given two fuzzy sets A, B ∈ F (U), it can be shown that A ⊆ B if and only if A(u i )≤B(u i ) for all u i ∈ U.
For two finite universes X ={ 0, 1, . . . , P - 1 } and Y ={ 0, 1, . . . , Q - 1 } a fuzzy relation (FR) from X to Y can be defined as R ={ (x, y) , R (x, y) | (x, y) ∈ X × Y }.
FRs can be defined using matrix notation as:
Furthermore, the set of all FRs from X to Y is denoted by F (X × Y) [26, 27], whereas the set of all constant FRs from X to Y is represented by CR (X × Y). This representation is equivalent to the set of all R ∈ F (X × Y) such that R (x, y) = K, with some K ∈ [0 1] for all (x, y) ∈ (X × Y).
If the set of all closed subintervals associated with [0,1] is designated by L ([0, 1]) such that
Then L ([0, 1 ]) will be a partially ordered set with respect to the relation ≤
L
, which can be defined as follows. For
In addition, (L ([0, 1 ]), ≤
L
)is a complete Lattice as designated by Deschrijver et al. [28] whose smallest and largest elements are given by 0L = [0, 0 ] and 1L = [1, 1 ] respectively. Given the presence of elements which are not comparable, (L ([0, 1 ]), ≤
L
) does not represent a linear lattice. The order relation given below [29, 30] will also be employed in this work:
Furthermore, definition of an involutive interval-valued (IV) negation is relevant to the method presented herein. In particular, an IV negation NIV can be defined as a decreasing mapping L [0, 1] → L [0, 1] with respect to ≤
L
satisfying N
IV
[1
L
] =0
L
and N
IV
[0
L
] =1
L
. N
IV
is said to be involutive if
This membership function applied in the proposed method employs triangular norms and co-norms to develop operators generating lower (LIB) and upper (UIB) interval bounds associated with the interval representing the membership degree variations. In particular, the lower and upper bounds of the intervals are generated using generalized triangular norms and co-norms [24] as follows.
Lower interval bound (LIB) generator
A triangular t-norm T : [0, 1] → [0, 1] is an increasing, commutative, associative function, such that T (1, x) = x for all x ∈ [0, 1]. Four fundamental t-norms can be defined as follows:
Given the associativity property of the t-norm, by induction, each t-norm T can be extended uniquely to an n-ary operation such that for each n-tuple (x1, x2, …, x
n
) ∈ [0, 1]
n
we can write:
Therefore, the t-norm can assume a different number of arguments.
For an FR R ∈ F (X × Y) given two t-norms T1 and T2 and two values m, n ∈ N such that
The values of n and m specify the considered window by a matrix of dimension (2n + 1) (2m + 1) centered at (x, y).
In the simple case where n = m,
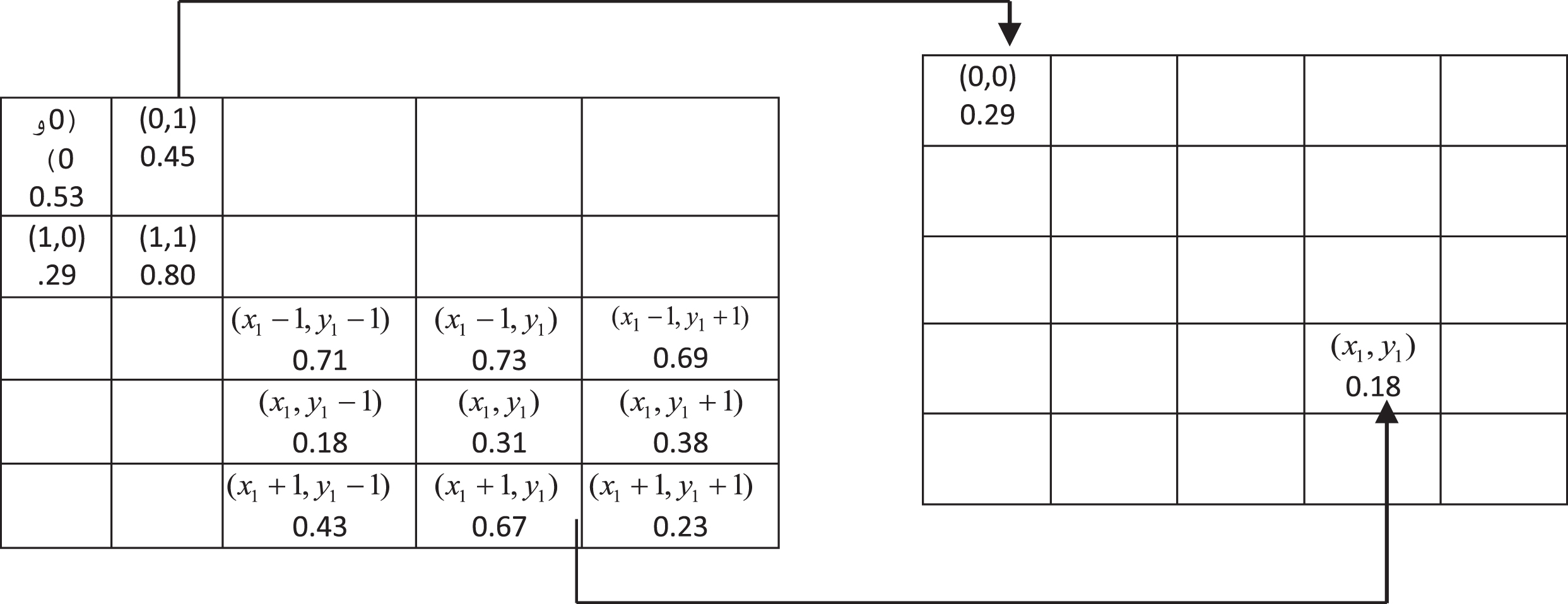
An Example demonstrating application of the Lower Interval Bound (LIB) Generator.
Similarly, for (x1y1) ∈ X × Y in Fig. 1.
The following proposition, the proof of which simply follows from the definition of the t-norm, captures the key properties of the LIB generator. In particular, for an FR represented by R ∈ F (X × Y) and an LIB generator,
For i∈ { - n, …, 0, …, n } and j∈ { - m, …, 0, …, m }, if R (x - i, y - j) =0 then
According to property1 if in a given neighborhood one of the elements is zero, then the LIB operator generates a zero value which indicates the dominant contribution of zero in determining the value generated by the LIB operator. Property 2 simply signifies that generation of the lower interval bound leads to reduction of the pixel intensity, implying that if the LIB operator is applied to an image (FR), a darker image is obtained. Furthermore, the degree of darkening increases with the size of the window.
Generation of the upper interval bound follows a similar approach to that taken for the lower interval bound. The operator generating the upper interval bound is defined using triangular conorms (t-conorms).
A triangular t-conorm S : [0, 1] 2 → [0, 1] is an increasing, commutative, associative function, such that S (0, x) = x for all x ∈ [0, 1]. Four fundamental t-conorms can be defined as follows:
For an FR R ∈ F (X × Y) given two t-conorms S1 and S2 and two values m, n ∈ N such that
The values of n and m specify the considered window by a matrix of dimension (2n+ 1)×(2m+ 1) centered at (x, y).
In the simple case where n = m,
The following proposition, the proof of which simply follows from the definition of the t-conorm, captures the key properties of the UIB generator. In particular, for an FR represented by R ∈ F (X × Y) and a UIB generator,
For i∈ { - n, …, 0, …, n } and j∈ { - m, …, 0, …, m }, if R (x - i, y - j) =1 then
The first property signifies that if in the window corresponding to an element a neighboring element has the value of unity, then the UIB operation generates a one which indicates the dominant contribution of one in determining the value generated by the UIB operator. Property 2 simply signifies that by applying the UIB operator the degree of membership of each element (x, y) ∈ (X × Y) increases, hence the name upper interval bound (UIB) generator. Furthermore, if the UIB operator is applied to an image (FR), a brighter image is obtained. The effect of this brightening increases with the size of the window.
Next, using the following theorem a relationship between the two operators is established in terms of De Morgan triplets, i.e., triplets (T,S,N) defined by a t-norm T, a t-conorm S, and a negation N such that:
The LIB and UIB operators have been employed to construct interval-valued fuzzy relations intended for image edge detection [24]. The resulting fuzzy edge detector is briefly introduced in this section so that it can serve as a reference for quantitative comparison with the proposed edge detector.
If the image is represented by a fuzzy relation (FR), the variations in the degree of membership of a given pixel in a specific region can be accounted for by developing an interval-valued FR (IVFR) based on the given FR using boundaries generated for each interval [24]. In particular, the construction method of the IVFR requires that the membership degree of an element be an interval representing the variation between the membership degrees of the given element and its neighbors in the original FR. The lower and upper interval bounds are determined using triangular norm processing (tn-processing) and triangular co-norm processing (sn-processing), and are not necessarily generated using a square window in the vicinity of element. Given the interval lengths for each element of this IVFR a new FR, termed W-fuzzy relation can be constructed [24]. Furthermore, the interval length of each element of the IVFR will be adopted as the membership degree of the W-fuzzy relation so that the IVFR will be of the same dimension as the original FR. Essentially, this approach to identification of fuzzy edges involves establishing a correspondence between an IVF image generated based on IVFR and an image represented as an FR. The edge is defined in fuzzy terms such that sufficiently large variations in intensity correspond to a given edge. In order to distinguish the variations in the intensity of a given pixel from those of the neighboring pixels the lower and upper interval bounds generated are employed to develop the IVFR and the corresponding W-fuzzy relation.
In terms of the mathematical constructs presented in section II, for an IVFR Rn,m ∈ IVF (X × Y) developed based on R ∈ F (X × Y) another relation known as the W-fuzzy relation denoted by W [Rn,m] is established using Rn,m such that:
By representing the image as fuzzy singletons, image edge detection based on fuzzy filtering, can be implemented by considering the influence of the neighboring pixels on the given pixel through application of an appropriate membership function. In particular, an image X of dimension M × N can be represented by the set of all pixels g
mn
∈ [0, L] where L denotes the maximum pixel intensity. X can be regarded as an array of fuzzy singletons whose elements can be defined using the membership functions μ
mn
∈ [0, 1] associated with each level of pixel intensity g
mn
∈ [0, L] as follows [22]:
The membership function μ
mn
∈ [0, 1] can be implemented by simple normalization as:
If X′ denotes the set containing all the edges present in the image X, then X′ can be written as:
The following membership function can also be employed for implementing the edge detector [22]:
This approach to edge detection is based on the assumption that if the central pixel in a spatial window belongs to an edge, then the difference between the intensity of the central pixel and the maximum and minimum levels of gray level intensities in the neighborhood should be approximately equal.
While the difference between the maximum and minimum pixel intensity does indicate the strength of the edge, a large difference may also exist due to presence of noise. Therefore, to exclude the effect of noise or potential outliers a heuristic membership function such as that given by equation (12) has to be further optimized. This may be accomplished at the expense of an increase in computation time by incorporating a simple rule. The following fuzzy rule can be articulated:
If the difference between the maximum and minimum pixel intensity associated with the given window is relatively high and the central pixel intensity lies between the minimum and maximum values of intensity, then the given window may be associated with an edge.
Accordingly, if W represents a w × w window surrounding a central pixel g mn , then the following membership functions can be defined [22]:
While both the heuristic membership functions given by Equations (11) and (12) and the fuzzy-rule-based membership functions given by Equations (13) permit simple implementation of edge detectors in which the image is represented as fuzzy singletons, the rule-based membership functions require considerably longer computation times [22].
Construction of a robust edge detector requires development of appropriate membership functions. The proposed method employs a fuzzy-rule-based approach to edge detection relying on the LIB and UIB operators to develop membership functions allowing measurement of the local membership degree. Accordingly, the variations in pixel intensity in a given neighborhood are represented by the length of its associated membership interval. Substituting the maximum and minimum operators in the membership functions of equation (13) by UIB and LIB generators respectively, the new membership functions can be written as:
The image edge can, then, be determined based on the two membership functions as follows:
To summarize the methodology presented, a flowchart outlining the proposed edge detection method is given in Fig. 2. In the first step, starting from the original gray scale image, a brighter and a darker image are constructed through the application of the UIB and LIB operators to determine the upper and the lower interval bounds respectively. In the second step, with the image represented by an array of fuzzy singletons, based on the novel membership functions given by Equations (15a) and (15b), the corresponding sets containing all the edges present in the image will be determined.
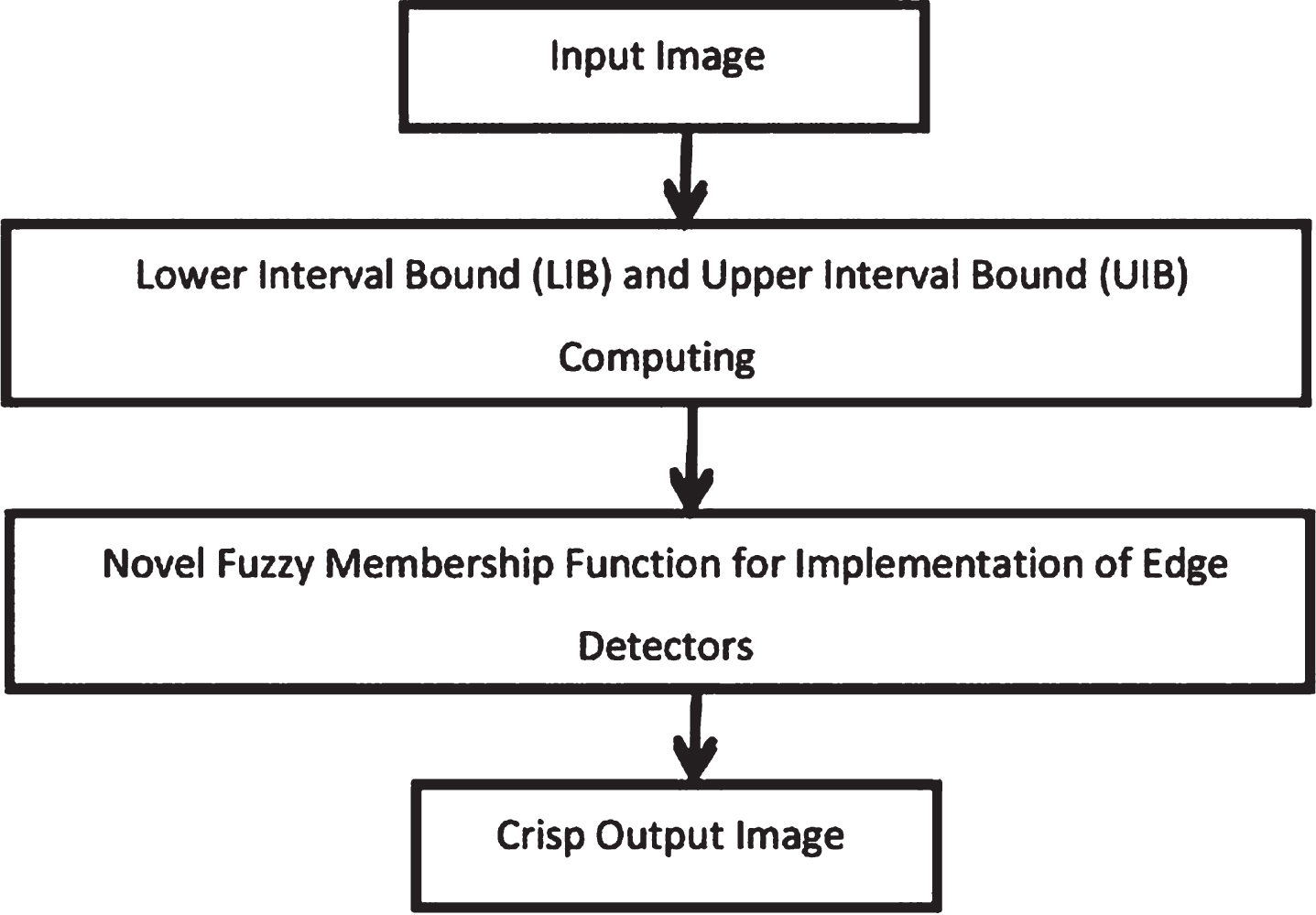
Flowchart Outlining Fuzzy Edge Detection based on the Proposed Algorithm.
In this section the merits of the proposed membership functions will be evaluated and the performance of the proposed method will be compared with those of conventional and fuzzy methods for edge detection
Performance of the membership functions
The advantage of the novel membership functions on which the proposed method is based can be qualitatively demonstrated by applying the general fuzzy edge detection methodology proposed to medical images using conventional membership functions and comparing the results with those obtained using the proposed membership functions. To demonstrate edge detection based on representation of an image by fuzzy singletons, the heuristic membership functions given by Equations (11) and (12) are applied to the image shown in Fig. 3a (Input CT image). The resulting images representing the edges are shown in Fig. 3b (Tizhoosh membership functions a) and Fig. 3c (Tizhoosh membership functions b).
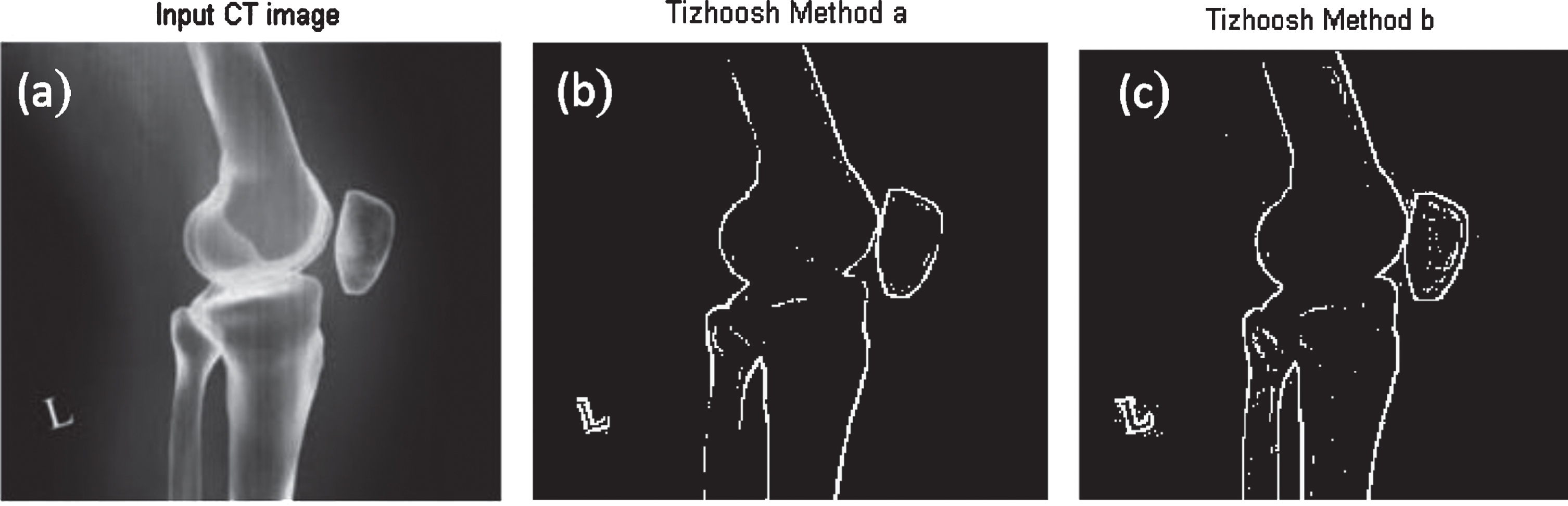
Application of the Heuristic Membership Functions Proposed in Ref. [22], Δ = 32, α = 1. a. Input image b. Membership function of equation (11) c. Membership function of equation (12).
In order to make a qualitative comparison between the performance of the proposed membership functions and those given by Equations (11) and (12), the proposed method for edge detection has been applied to the medical image of Fig. 3a with the resulting edges depicted in Fig. 3b and Fig. 3c. The results of the application of the proposed edge detection method may be compared with those obtained based on Canny’s standard method given in Fig. 3d, which is optimized for detection of step edges [31]. Comparing Fig. 3 with Fig. 4 it is evident that the proposed method produces a sharper image revealing more detail.

Application of the Proposed Membership Functions Δ1 = 128, Δ2 = 32. a. Input image, b. Membership function of equation (15a), c. Membership function of equation (15b), d. Canny’s Method.
Furthermore, although the proposed membership functions given by Equations (15a) and (15b) are essentially fuzzy-rule-based, application of the proposed edge detector employing these membership functions did not lead to a noticeably longer computation times as compared with the method applied to the same input image (Fig. 3) based on the heuristic membership functions of Equations (11) and (12). A definitive conclusion about the merits of the proposed membership functions with regard to computation time, however, has to be based on a more rigorous comparison.
The performance of the proposed edge detector is compared with those of fuzzy as well as non-fuzzy approaches for edge detection in terms of accuracy and processing time required for edge detection.
Quantitative Comparison of accuracy using Baddeley’s and Martin’s metrics
The proposed method for edge detection is compared with a non-fuzzy method employing morphological filtering [23] as well as with the fuzzy method employing interval-valued W-fuzzy relations [24] by applying each method to a set of six medical images. As is qualitatively evident from Fig. 4, the proposed method for edge detection is more effective in comparison with both of these methods. A quantitative comparison of binary images representing the edges produced by each of these methods is also performed by employing a metric introduced by Baddeley [32] based on the Hausdorf distance as well as a metric based on the local refinement error known as global consistency error introduced by Martin [25]. Application of these metrics for quantification of edge detection is briefly introduced in the following paragraphs.
The Baddeley’s Delta metric (BDM) may be used for comparison of binary images. This metric employs the Hausdorf distance introduced for comparison of binary sets [32].
If P = { 1, 2, . . . , M } × { 1, 2, . . . , N } identifies the positions in two binary edge images I1 and I2 of resolution M × N and E { I
i
} represents the positions { p ∈ P|I
i
(p) =1 } the kth BDM associated with I1 and I2 denoted by Δ
k
(I1, I2) can be defined as [14]:
The Martin’s metric essentially represents a measure of error known as the global consistence error (GCE).If R (S, p
i
) represents the set of pixels associated with a given region in segmentation S containing pixel p
i
, the local refinement error (LCE) is defined as [25]:
If S1 in one edge image is a refinement of S2 in the corresponding edge image at pixel pi, E (S1, S2, p
i
) will be zero, but E (S2, S1, p
i
) may be nonzero. Given the fact the local refinement error is not unidirectional at each pixel an error measure may be defined for the entire image. Specifically, if n denotes the number of pixels, the Global Consistency Error (GCE) which forces all local refinements to be unidirectional is defined as [25]:
A quantitative comparison of the binary edge images produced by application of the proposed method using the two different membership functions (Method A and Method B) as well as the morphological filtering and W-fuzzy methods to the six input images of Fig. 5 is performed. The results obtained based on the Baddeley’s and the Martin’s metrics are given in Table 1, where the values of the BDM delta metric and the GCE associated with each edge detection method are listed. As indicated in Table 1 edge detection using the proposed method is characterized by a lower GCE and consistently produces lower values of Baddeley’s Delta metric.

Qualitative Comparison of Edge Detection Methods based on Six Different Input Images
Quantitative Comparison of Edge Detection Methods
*Membership function of equation (15a). ** Membership function of equation (15b).
A commonly employed metric for quantifying the performance of edge detectors is the figure of merit (FOM) proposed by Abdou and Pratt1 in 1978. The so-called Pratt’s FOM represents the deviation of an actual (calculated) edge point from the ideal edge and it is defined by the following equation
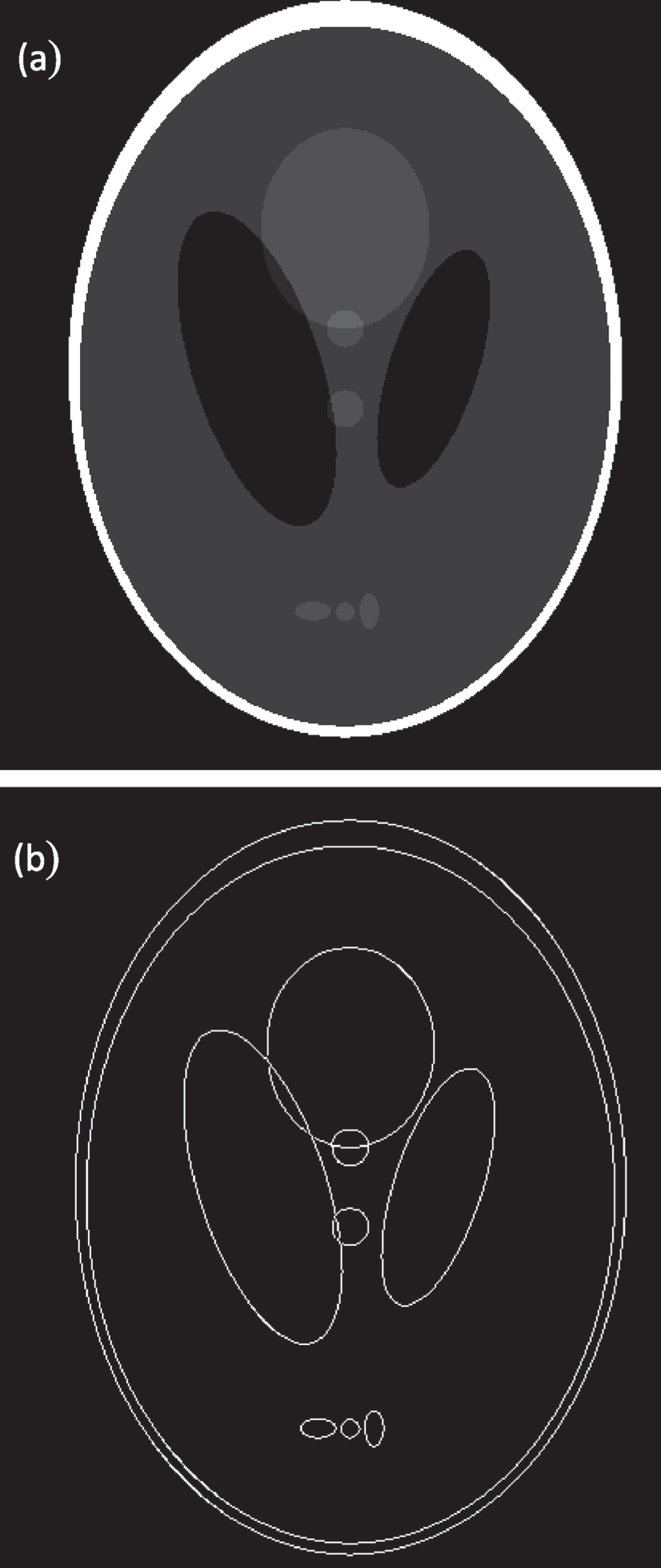
(a) Phantom standard image (b) Reference image of.
Closer to zero, on the other hand imply significant differences between the detected edge and the ideal edge [33, 34].
The performance of the proposed edge detector (using membership functions A and B) is compared with those of the edge detectors developed based on the W-Fuzzy, the morphological filtering and the Laplacian of Guassian methods as well as the methods advanced by Canny, Sobel, Perwitt based on Pratt’s FOM. The resulting FOM values in absence of noise and in presence of Guassian noise levels characterized by variance values of 0.001 and 0.002 are given in Table 2.
Comparison of the Edge Detectors based on Pratt’s Figure of Merit (FOM)
As is evident from Table 2, using either membership funcion A or B the proposed method gives values of Pratt’s FOM closer to unity indicating a higher performance as compared with the other methods. Most conventional methods of edge detection require differentiation for processing of the edges which causes sensitivity to noise in the image. The high performance of the proposed fuzzy method can be attributed to the fact that it does not rely on differentiation. It is also interesting to note that the value of FOM actually increases as the noise level rises indicating that the detected edge approaches the ideal one.
The overall processing time required for edge detection by the proposed algorithm is detailed in Table 1. As indicated the total time required by the proposed edge detector is relatively small and is on the order of tens of milliseconds.
A comparison of the computation time required by the proposed method with the processing time expended by other edge detectors is given in Table 4. As is evident the proposed method outperforms other edge detection methods in terms of the processing time required for edge detection. Fuzzy edge detection techniques are computationally more efficient; however, the performance of the proposed method in terms of processing time is also superior to that of the W-fuzzy technique given the relatively simple form of the membership functions employed.
Run-time (ms) of the proposed (A) method edge detector
Run-time (ms) of the proposed (A) method edge detector
Time (ms) requirement comparison between our method and others
If the degree to which a given pixel represents an image edge is defined by a fuzzy membership function the wide range of tools available in the fuzzy set theory may be employed to optimize the edge detector. Through the application of the fuzzy inference scheme, novel membership functions have been proposed allowing measurement of the local membership degree. With the image represented by an array of fuzzy singletons, these fuzzy-rule-based membership functions may be applied to determine the corresponding sets containing all the edges present in the image. By enabling measurement of the local membership degree or intensity changes in the neighborhood of a given pixel as an interval length, a fuzzy representation of the boundaries of the objects in the image is obtained based on the proposed novel membership functions. The relatively simple form of the proposed membership functions allows fast computation of the results, thereby enabling image edge detection in real-time. At the same time, based on a rigorous quantitative comparison of the error associated with detection of the image edge it was demonstrated that the performance of the proposed method surpasses that of a non-fuzzy method employing morphological filtering as well as that of a fuzzy method employing interval-valued fuzzy relations. In addition, the proposed method outperformed other relevant methods based on the Pratt’s figure of merit. The processing time required for edge detection was also shown to be lower for the proposed method as compared with that of fast edge detectors. The proposed edge detection method, therefore, shows promise for fast and accurate detection of object edges in biomedical images.