
Abstract
In this paper, we propose the accommodation of the semantic-based interpretability in evolutionary linguistic fuzzy controller through an overlap-based encoding strategy for the triangular membership function (MF) parameters. With this strategy, the coverage and the distinguishability aspect of the fuzzy partitions are guaranteed during the evolution. The idea behind this proposal is that the set of the membership functions forming the fuzzy partition are defined as overlapped functions instead of separate functions subjected to some constraints as the most previous works do. To test the design technique, simulations were performed to optimize direct-drive DC motor fuzzy controller. Simulation results show that fuzzy partition interpretability is guaranteed and the evolved FLC exhibits high performances in slow and fast tracking, as compared with the conventional PD controller.
Keywords
Introduction
Fuzzy logic controllers (FLCs) have been successfully applied in several industrial areas [1 –5]. There are two kinds of FLCs, [6 –9]: Takagi-sugeno (T-S) FLCs and linguistic FLCs also known as Mamdani FLCs. The T-S FLCs are characterized by the flexibility in system design but the interpretability characteristic, which consists in the capability to express the system behavior in human understandable way, is lost. The linguistic FLCs are less flexible in system design but they are well-known in the soft computing community for their distinctive and intrinsic feature of the interpretability.
The performance of both types of FLCs depends substantially on the constituents of the fuzzy knowledge base (FKB), which is traditionally determined using quite tedious iterative trial/error method. The research works on generating automatically the FKB started around 1990 [10 –13]. Since then, new approaches have been continually developed and refined based on evolutionary algorithm (EA) [14, 15], particle swarm algorithm (PSO) [16, 17], ant-colony algorithm (ACO) [18], amongst others. Special attention has been devoted to the use of the evolutionary algorithm in the literature [19]. In the earlier evolutionary linguistic fuzzy control system, the focus has been on the improvement of the control performance without paying special attention to its interpretability. Consequently, the EA evolves the input/output fuzzy partitions and the fuzzy rule base (FRB) without any associated meanings.
At the end of the twentieth century, the research studies on automatic fuzzy system design began to challenge the interpretability issues besides the accuracy one [20 –23]. The most notable of these issues are complexity-based interpretability and semantic-based interpretability also referred as low-level interpretability and high-level interpretability, respectively [24]. The research studies dealing with complexity-based interpretability issue are dedicated for decreasing the complexity of designed linguistic fuzzy system by reducing the number of input variables, the fuzzy partition granularity, the fuzzy rule base size, the number of premises in fuzzy rules, etc [25]. The semantic-based interpretability issue is associated with some properties such as coverage also called completeness, distinguishability, consistency of the FRB, the number of the fuzzy rules fired simultaneously [26]. It is to note that, in comparison to the complexity-based interpretability, the semantic-based interpretability is less tackled in literature and the emphasis was on the distinguishability and the coverage properties. The fundamental interpretability issue faced in fuzzy control design is the semantic-based interpretability, because in fuzzy control applications the number of input variables, fuzzy sets and conditions in the premise part of the fuzzy rule is usually quite small and could be assigned heuristically.
The semantic-based interpretability is taken into account by the existing design research works in two different ways: implicitly and explicitly. Most of these earlier research works considered the semantic-based interpretability implicitly by using the strong fuzzy partition to keep the global semantic-based interpretability or impose some constraints on the descriptive parameters of the MFs to satisfy the coverage and distinguishability aspects, [27 –30]. These constraints make certain solutions invalid, solutions that might otherwise lead to the best solution. Whereas, in most of the latest research works on this issue [23 , 31–34], the semantic-based interpretability is considered explicitly by measures or indices quantifying the related interpretability aspects. These measures are monitorized and constrained by threshold values during a multiobjective optimization process. In [23], J. Valente de Oliveira introduced the sigma-count measure of the internal variable for distinguishability and a measure based on the concept of optimal interfaces for coverage. Both of them were considered as constraints for MFs optimization. In [31], Gacto and al. proposed the maximization of geometric mean of three metrics (GM3M) index to preserve the semantic-based interpretability while tuning the MFs definition parameters by an SPEA2 algorithm. The GM3M index as its name implies aggregates three metrics that measure the similarity to an initial fuzzy data base (FDB) associated with a given linguistic meaning. The interpretability objective function in [32] is based on the coverage criterion defined by the sum of all the membership degrees of all the MFs in the universe of discourse (UoD). It is subjected to a set of constraints imposed on the descriptive parameters of the MFs. These works present the disadvantage that the calculation of the proposed measures is usually computationally intensive since they include numerical integration. To overcome this problem, a very interesting proposal presented in [35] justifies the effectiveness and the computational efficiency of possibility as distinguishability measure under some interpretability constraints. Nevertheless, calculating possibility may require a numerical sampling of the UoD.
In this paper, we pursue this semantic-based interpretability challenge in the design of linguistic fuzzy logic controller by tackling this problem implicitly. We suggest the use of overlap-based encoding strategy in an integer-coded evolutionary algorithm (IEA). In this algorithm the parameters of the linguistic FLC (the FRB and the FDB) are optimized simultaneously because of their codependency in affecting the performance of the FLC.
The position of the proposed overlap-based design approach among the over-mentioned related works is summarized in Fig. 1. The overlappings between the adjacent MFs are coded in the chromosome and evolved by the IEA. Doing so, the partial overlapping between the adjacent MFs is allowed and the coverage aspect is guaranteed, and there is no need for measuring it and using the multiobjective search. Besides this contribution, i.e., the overlap-based encoding strategy, we suggest to work with searching ranges of the MF parameters that are dependent on the current and adjacent MF parameters. In fact, they are formulated so that the adjacent MFs stay always distinguishable. Having these adjacent MF parameters evolving, the searching ranges must be updated or recalculated accordingly. This contribution gives the IEA the ability to evolve exclusively valid distinguishable fuzzy partitions. Thus, the proposed design approach afford the advantage of simplifying the design of an interpretable and accurate linguistic FLC problem, which is known to be a constrained and/or multi-objective problem, into an unconstrained one-objective optimization problem by implementing the accuracy in the objective function and accommodating the semantic interpretability in the structure of the evolutionary algorithm. In this work, the triangular and symmetric MF is used. The motivation behind this choice stems from its simplicity in processing and in the application of the proposed overlap-based encoding strategy. The integer encoding strategy is used to decrease the Hamming-Cliff effects related to the use of binary encoding and to accelerate the convergence time.

Position of the proposed overlap-based design approach among the related works.
This paper is organized as follows. Section 2 pre-sents the basic idea behind the accommodation of the semantic-based interpretability in the proposed evolutionary algorithm. In section 3, we present detailed description of the structure of the linguistic FLC to be evolved and the proposed evolutionary algorithm applied to interpretable linguistic FLC design. Simulation study that highlight the effectiveness of the proposed design technique for linguistic FLC control is provided in Section 4. In Section 5, some concluding remarks are established and some possible perspectives are given.
In the evolutionary fuzzy system applications, the MFs are traditionally defined as separate functions. In this work, we propose to define the MFs with respect to their adjacent MFs in the fuzzy partition. The relationship between the adjacent MFs is quantified by the overlapping. For these adjacent MFs, there are four possible overlapping situations: over-overlapping MFs, fully-overlapping MFs, partially-overlapping MFs, and non-overlapping MFs as illustrated in Fig. 2. In the partially-overlapping MFs the overlapping percentage must be at least 10% of the full overlapping. Besides the overlapping situation, the distinguishability and the coverage aspects of the different situations are also depicted in Fig. 2. The over-overlapping MFs are not distinguishable but satisfy the coverage aspect. On the contrary, the non-overlapping MFs are distinguishable but the coverage aspect is not satisfied. These facts make both of them non interpretable MFs. However, the fully-overlapping MFs and the partially-overlapping MFs are distinguishable and satisfy the coverage aspect at the same time, which means that they form interpretable fuzzy partitions. Thus, to guarantee the fuzzy partition interpretability, the adjacent MFs must be either fully-overlapped or partially-overlapped.
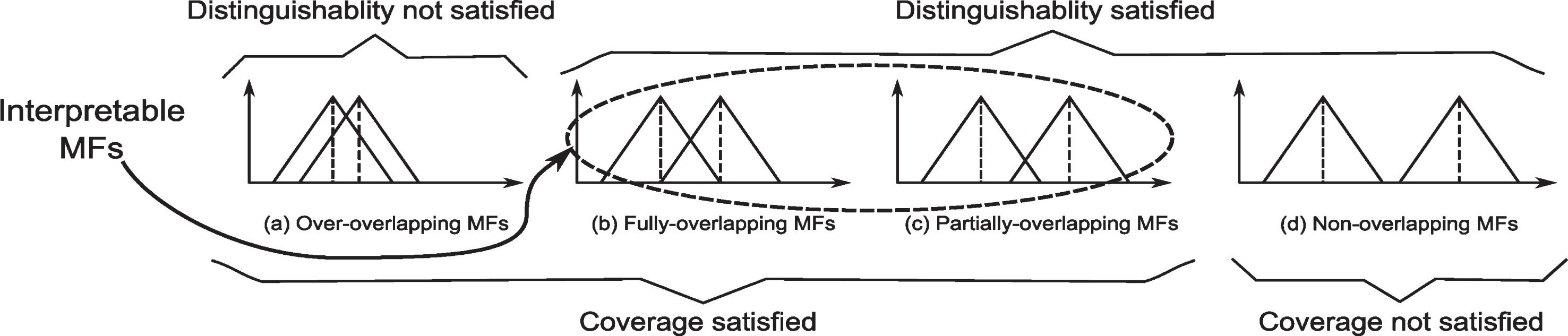
Interpretability and the possible overlapping MFs situations: (a) Over-overlapping MFs, (b) Fully-overlapping MFs, (c) Partially-overlapping MFs, and (d) Non-overlapping MFs.
Since allowing partial overlappings during evolution requires the test of the existence of an overlapping between the adjacent MFs in all the chromosomes, most of the evolutionary design methods of fuzzy systems in the literature restrict adjacent MF to fully overlap. In our design method, the overlappings are coded in the chromosome and evolved by the IEA. This fact enforces the partial overlapping between the MFs, and the infeasible chromosomes are completely avoided during the evolutionary operations.
In the previous evolutionary fuzzy techniques, it is used to optimize the position of the characteristic points of the MFs within independent ranges fixed off-line. However, it is well known that these characteristic points are dependent among themselves and among those of the adjacent MFs. To take into account the interdependency among the MFs parameters, the boundaries of the searching ranges of the MF parameters are designed to be dependent on the previously calculated parameters of the current and adjacent MFs. They are not fixed off-line but computed during the evolution, in particular during the decoding process.
The proposed evolutionary fuzzy control system for DC motor includes an IEA, and a linguistic FLC. The design of the linguistic FLC is carried out offline by the IEA that manipulates chromosomes or genotype using some evolutionary operators. The chromosome’s characters termed alleles are integer values. Every chromosome defines a potential FKB which is used by the linguistic FLC to track the desired trajectory and then to calculate the fitness function that measures its performance.
Evolved linguistic fuzzy logic controller
As in most of the existing FLCs, we have chosen the input variables of our linguistic FLC to be the error (x
1) and the change error (x
2) on the angular position of the motor shaft which are expressed as:
The output of the linguistic FLC is the input voltage E a that excites the DC motor and brings it to the desired angular position.
The input variable UoD is set to U = U 1 × U 2, where U 1 = U 2 = [-0.05, 0.05] [rad], and the output variable UoD is set to V = [-24, 24] [Volt].
The linguistic FLC consists of the following constituents:
A singleton fuzzifier to transform a crisp value into a fuzzy singleton. The fuzzy data base where the fuzzy partition of the UoD of x
1 is based on three triangular and symmetric MFs associated to the following labels: negative (N), zero (Z) and positive (P). For the second input x
2 and the output E
a
, the fuzzy partitions of the corresponding UoD is based on seven MFs associated to the following labels: negative big (NB), negative medium (NM), negative small (NS), zero (Z), positive small (PS), positive medium (PM), and positive big (PB). The fuzzy rule base is a collection of fuzzy conditional statements or IF-THEN rules. The size of the fuzzy rule base have chosen to be M = 3 ×7 = 21 to account for every possible combination of input fuzzy sets. Each fuzzy IF-THEN rule is associated with Larsen’s fuzzy implication rule. The fuzzy inference engine derives from each linguistic fuzzy rule of the FRB, an output fuzzy set using the compositional rule of inference “sup-star”. The defuzzifier used is the modified height defuzzifier.
Based on the above-mentioned specific choices for these constituents, the linguistic FLC in question is formulated as an expansion of fuzzy basis function [36].
To use the IEA in any optimization problem, it is vital to determine first the parameters to be evolved and then code it as some finite-length strings i.e., chromosomes “Ch”. In fuzzy controller optimization two elements must be coded in the chromosome and evolved: the FRB and the FDB.
The FRB parameter set to be evolved includes the labels of the consequent part in the fuzzy rules.
The FDB parameter set to be evolved includes the descriptive parameter set of the MFs associated to the input/output fuzzy variables. Since the shape of the MFs is assumed to be triangular and symmetric and the proposed overlap-based representation suggests the use of the overlapping between the adjacent MFs as a descriptive parameter, then we need only two parameters for their description. These parameters are elements of {overlapping (O), center (C), width (W)}. It can be easily stated that the MFs located at the extremes of the UoD are described by the center and the width; while for the others, the descriptive parameters are the center and the overlapping.
Chromosome size reduction
Most fuzzy controllers dedicated to DC motor position control are basically characterized by the following properties: The input/output fuzzy partitions along the UoD are symmetric; The zero input labels should yield zero output label; The symmetry of the input labels of two fuzzy rules implies the symmetry of the output labels of these rules.
These properties are used in this work to reduce the chromosome size and so the convergence time as follows:
Using the first property about the symmetry in the fuzzy partitions, the MFs located in either the positive or negative part of the UoD and the MF centered at zero are the only ones to be encoded in the chromosome, Fig. 3. In addition to this, the MF associated to the zero label for each variable must have the center fixed at zero. The second property gives already one fuzzy rule -if x 1 is Z and x 2 is Z then E a is Z- which must be excluded from evolution. From the last property, we suggest that we have to search only the half of the FRB and then deduce the other half by symmetry, Fig. 4, [15].

MF parameters (a) x 1 (error), (b) x 2 (change error) and (c)E a (input voltage).

(a) Symmetry mechanism of labels in the consequent part of fuzzy rules, (b) Encoding and the reduction strategy in the FRB.
The FLC parameters to be evolved, described above, are encoded on the same chromosome “Ch″ of 44 genes using a multi-parameter, and integer encoding strategy, Fig. 5. The first 10 gene fragment of the chromosome encodes the FRB. The remaining 34 gene fragment encodes the MF parameters which form the FDB. The genes in the first fragment take values from 1 to 7 while in the second one their values vary between 1 and 9. Each MF parameter (X) is encoded on two-gene fragment (Ch
i
Ch
i+1) representing a percentage of a specific searching range length I
X
. the numerical MF parameter, which depends on its representative genes and the corresponding searching range, is given by:
The searching range lengths (I X ) corresponding to the different MF parameters are given in Table 1.
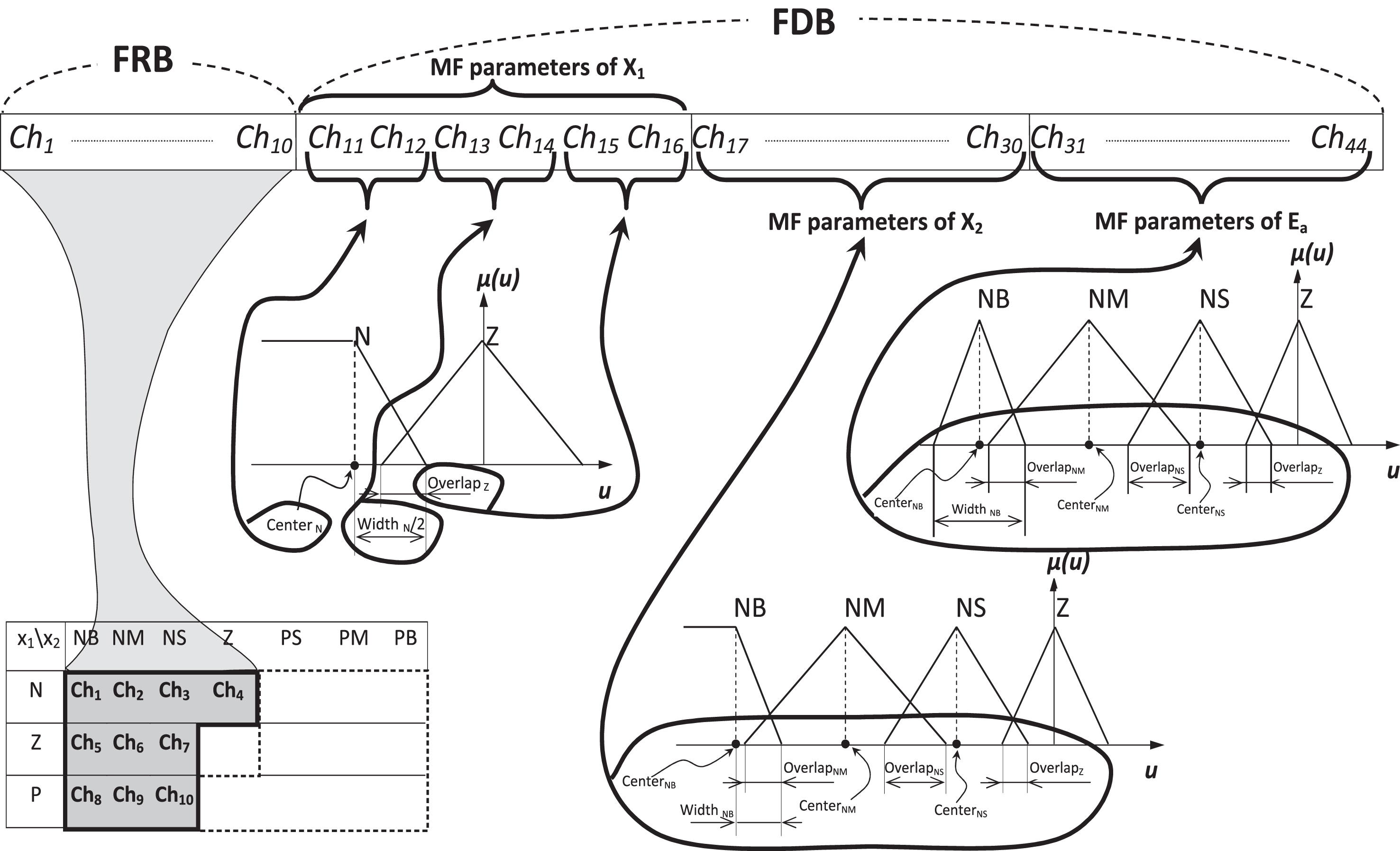
Schematic representation of the FKB parameters on a chromosome.
Searching range length (I X ) for MF parameters
The graphical representation of the MF parameters and its corresponding searching range length is depicted on Fig. 6 and Fig. 7 for a typical example of MF parameter decoding process of the input and output variables. It is clear that every searching range depends on one or two of the previous adjacent MF parameters. As consequence, the resulting fuzzy partition is always interpretable and valid.
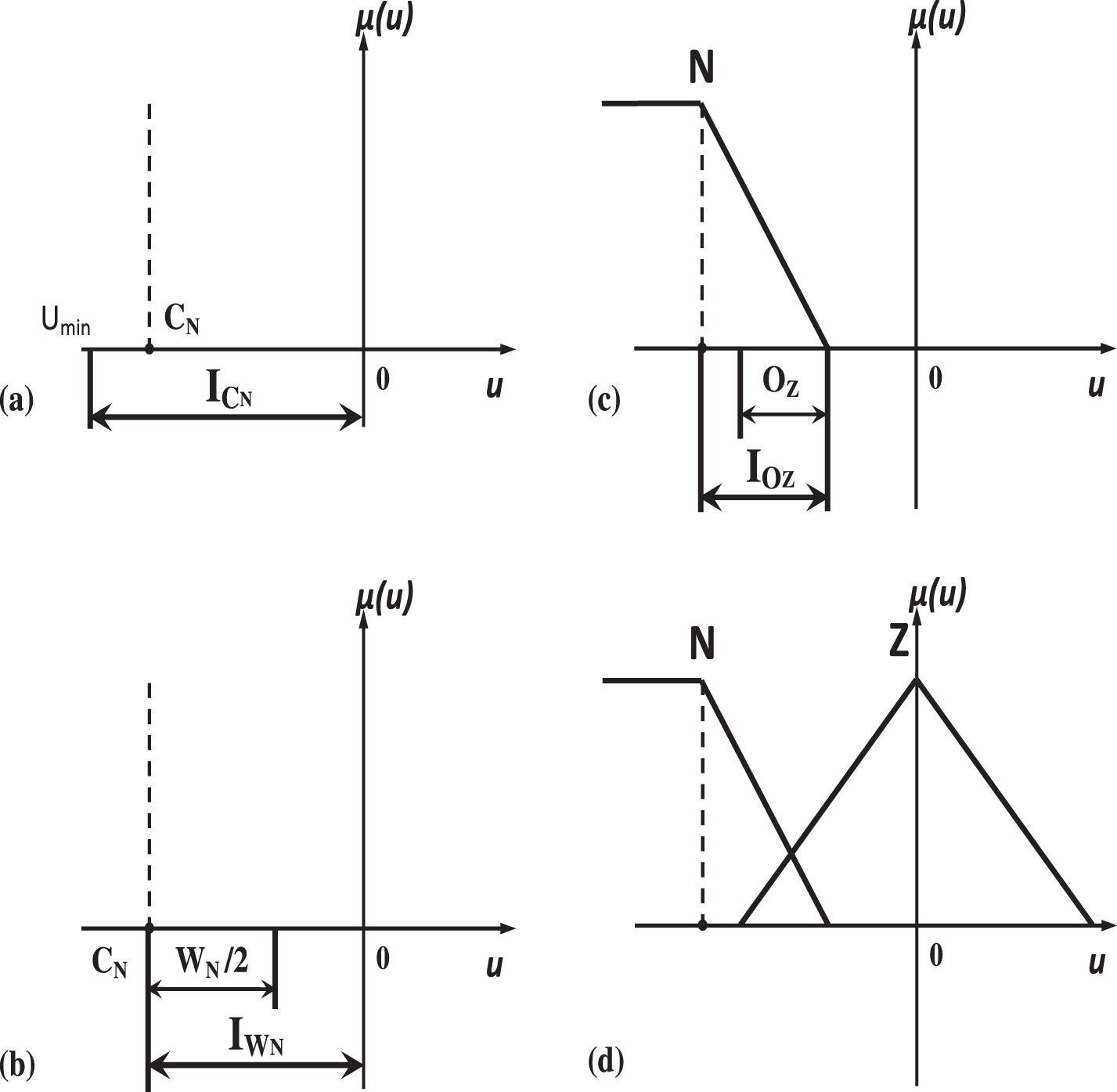
Example of FDB decoding process and representation of searching ranges of the MF parameters for the input x 1. (a) Center N , (b) Width N , (c) Overlap Z , (d) Resulting fuzzy partition.

Example of FDB decoding process and representation of searching ranges of the MF parameters for the input x 2 and the output E a . (a) Center NB , (b) Center NM , (c) width NB , (d) Overlap NM , (e) Overlap NS , (f) Center NS , (g) overlap Z , (h) Resulting fuzzy partition.
In the present work, a hybrid chromosome initialization is used. Specifically, the FDB fragment of the chromosome is generated randomly within the corresponding ranges, while we adapted the MacVicar-Whelan rule base model for the generation of the FRB fragment.The MacVicar-Whelan rule base model is a suitable choice for motor drive applications and more appropriate for PD-like FLCs as it is the case with our work. For more detailed description of the MacVicar Whelan approach refer to [37].
Bi-Phase scheme
Evolutionary algorithm is an effective population-based search technique based on the balance between the exploitation and exploration. The search strategy in the exploitation is a local search guided along the generations with the best solution found so far. While in the exploration, a random search is performed without use of any prior information about the problem domain. The main factors responsible of the exploration and exploitation are the selection, mutation, and crossover operators. In addition, the control parameter settings contribute significantly in affecting the exploratory power of the EA. As suggested [38 –40] none of these over mentioned factors is exclusively an exploitation or exploration factor. The evolutionary operators and control parameter settings can stress the exploration/exploitation trade-off towards one type or another by an appropriate choice, found by trial and error.
The proposed IEA consists of two phases: an exploration phase and an exploitation phase. The exploration phase generates randomly the initial population and performs a standard evolutionary process to explore globally the search space. The exploration power in this phase is increased by using the roulette wheel selection operator, the two-point crossover operator and the integer mutation operator with relatively high values of crossover and mutation probabilities. Doing so, the crossover and mutation operators have enough time to properly recombine and mutate the chromosomes before the convergence. The exploitation phase is characterized by the use of integer creep mutation and elitism strategy while disposing of the crossover and integer mutation operators to promote the exploitation power of the IEA. In this work, the integer creep mutation changes one allele through the incrementation or decrementation by 1. This integer creep mutation operator is technically the main factor responsible for the exploitation power by shifting the mutated chromosome to its vicinity region. In this phase, the initial population is generated by creep mutating the best chromosome obtained from the former phase. If a new best chromosome is found in the new generation, we reinitialize the population in the same way as described above but using the new best chromosome. This process is repeated until the satisfaction of the termination criterion, which is reaching a specific maximum number of generations.
Fitness function
The FLC design problem is formulated as an optimization problem where we seek a good trajectory tracking while ensuring smooth behavior in control action. The incorporation of these objectives in one fitness function is done as follows:
Where, the parameters a 1 and a 2 are weights used to stress the relative importance of the different fitness function components. The numerical values used are a 1=1 and a 2 = 10-7 and they are determined by trial and error.
Since the semantic-based interpretability is accommodated in the proposed IEA, we have only to investigate, in this section, the accuracy performance of the designed linguistic FLC for tracking control of direct-drive DC motor. The purpose of the simulations is to compare the tracking and robustness performance of the conventional PD control with the FLC evolved by the proposed IEA.
Direct-Drive DC Motor
The system to be controlled is a direct-drive DC motor. Its main characteristic is that the load is directly driven without any motion transfer mechanism such as chain, belt, gearbox or ball screw. Some unwanted non-linear phenomena such as friction, vibration, backlash, and elasticity are associated with the use of these motion transfer mechanisms. Direct-drive motor, however, need a more accurate controller. This is due to its significant sensitivity to the external disturbances or any low variation in the load since they are directly reflected on the motor dynamic.
The dynamic equations of the direct-drive DC motor are given by:
Where q,
The electrical and mechanical parameters and their numerical values are given on Table 2.
Direct-drive DC motor parameters
The task of the FLC in the design phase is to track the following trajectory:
The initial states of the DC motor are given by: q = 0 [rad], and
The population size, the crossover probability, the mutation rate and the maximum number of generation in the exploration phase were set at 50, 0.8, 0.1 and 40, respectively. Because of the large dependence of the final solution on the initial population generated randomly, the IEA was run ten times using different initial populations. Each of these runs was stopped after 150 generations and the best FKB found by the IEA in each of the ten runs was recorded.
The best FKB found by the proposed IEA that produces the best final objective value is illustrated in Table 3 and Fig. 8. The entire FRB of the best FLC is given in Table 3, where there is clearly a symmetry of linguistic labels with respect to the fixed fuzzy rule base -if x 1 is Z and x 2 is Z then E a is Z- and also a monotonic increase in linguistic terms from left to right and from top to down. Fig. 8 illustrates the description of the MFs for the input/output variables optimized by the IEA including those deduced by symmetry. It is clear that their fuzzy partitions are effectively distinguishable and the coverage aspect is satisfied.

The best MFs evolved by IEA.
The best FRB evolved by IEA for DC motor control
To asses the effectiveness of the best linguistic FLC found by the proposed IEA, we compare its tracking performances to those of a classical PD control. The gains of PD controller are determined according to the Ziegler-Nichols tuning method based on the step response of the direct-drive DC motor. Their values are given as: K P = 400, K D = 3.
The tracking performances of the best linguistic FLC are compared against those of the PD controller for two cases:
Nominal case where the nominal model of the DC motor is used without inducing any disturbances. In fact, it is a disturbance-free case.
Disturbed case where the nominal model of the DC motor is supposed to be affected by motor torque disturbances, load disturbances and friction disturbances. The motor torque disturbances are torque ripple disturbances inherent in DC motor. They have frequency components proportional to the motor speed and can cause poor tracking control in some frequency regions. It is given by:
The load disturbances represent various external torques that affect the motor inertia during the environment interaction. The simulations are conducted with a varying moment of inertia while the motor is in motion as follows:
t ≤ 2s, I
n
=0.0974 N·m·s2/rad (nominal value); 2s<t ≤ 5s, I
n
=0.2922 N·m·s2/rad (three times of nominal value); 5s<t ≤ 6s, I
n
=0.0974N·m·s2/rad (reduced inertia to nominal value); 6s<t ≤ 8s, I
n
=0.5844N·m·s2/rad (six times of nominal inertia); 8s<t ≤ 12s, I
n
=0.0974 N·m·s2/rad (reduced inertia to initial value).
The friction disturbances are nonlinear and complex phenomena. In practical, the most influencing friction effects are the viscous and the Coulomb friction effects. In the simulations, they are defined by:
To investigate the performance of the obtained linguistic FLC, the control objective is set as controlling the angular position of the motor shaft to track the following trajectory:
The performances of the obtained FLC and the conventional PD controller under the two cases are presented in Fig. 9 and Fig. 10, respectively.
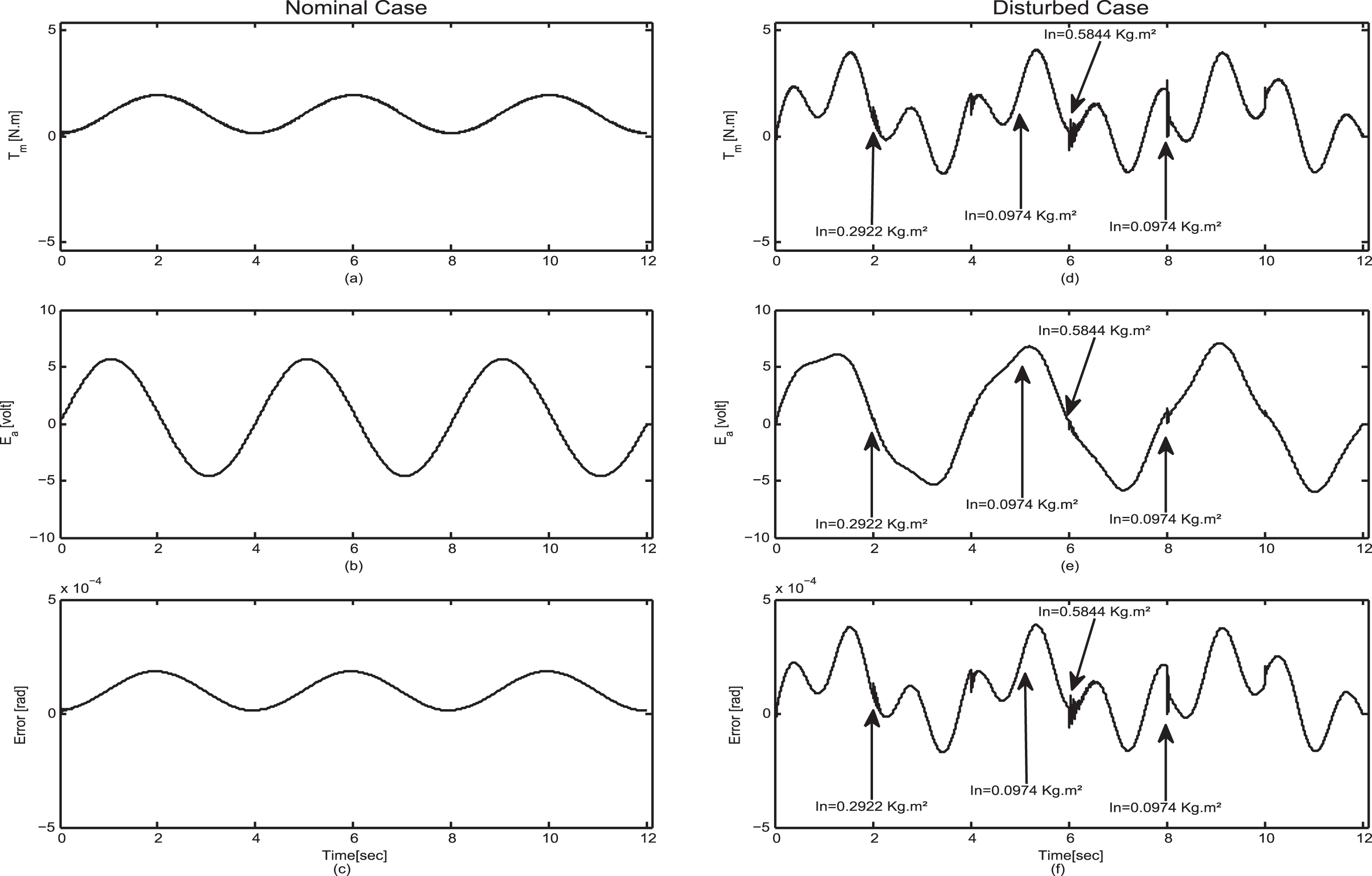
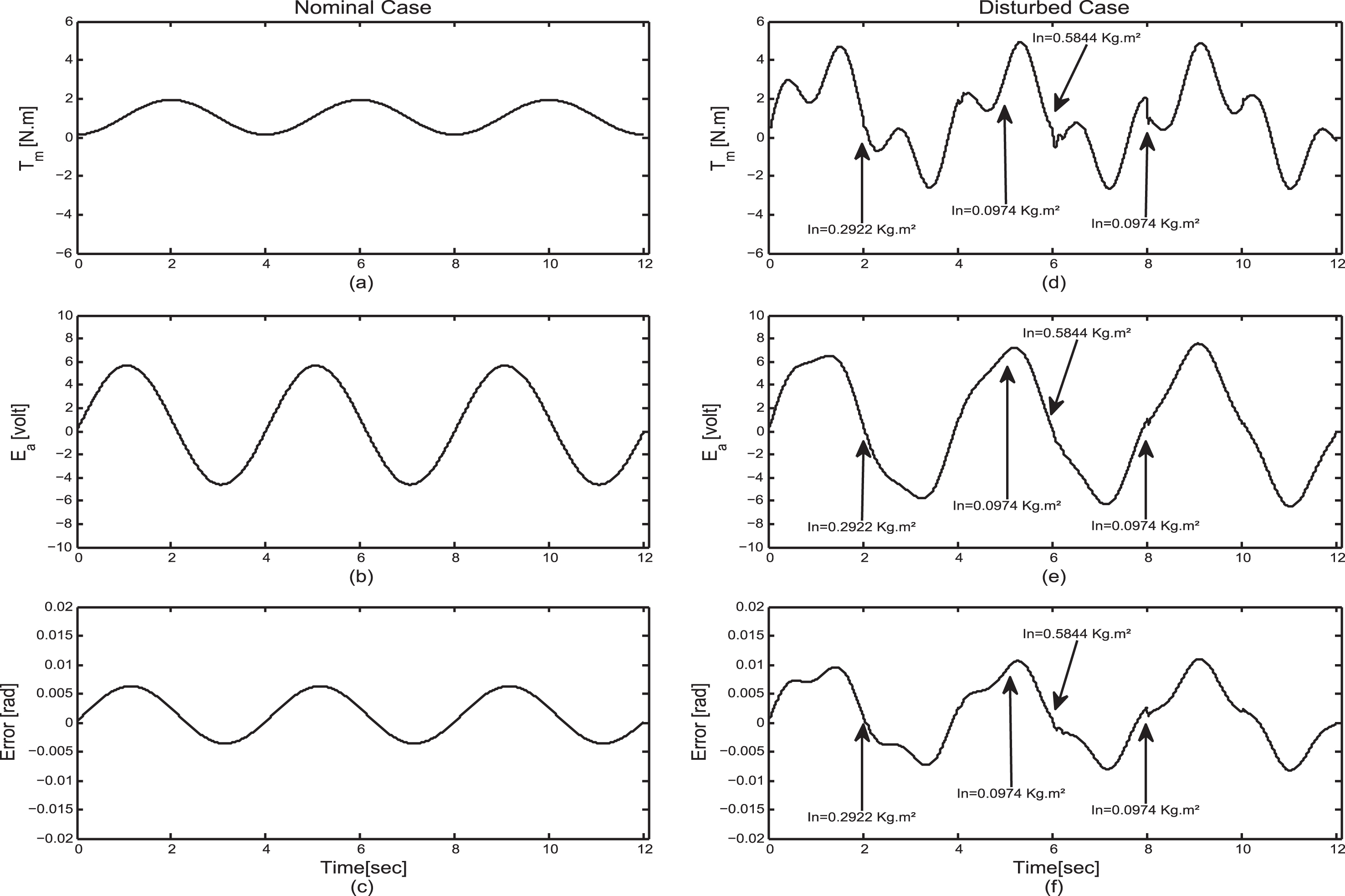
Tracking performances and control activities of the obtained FLC. (a)-(c) Nominal Case, (d)-(f) Disturbed Case.
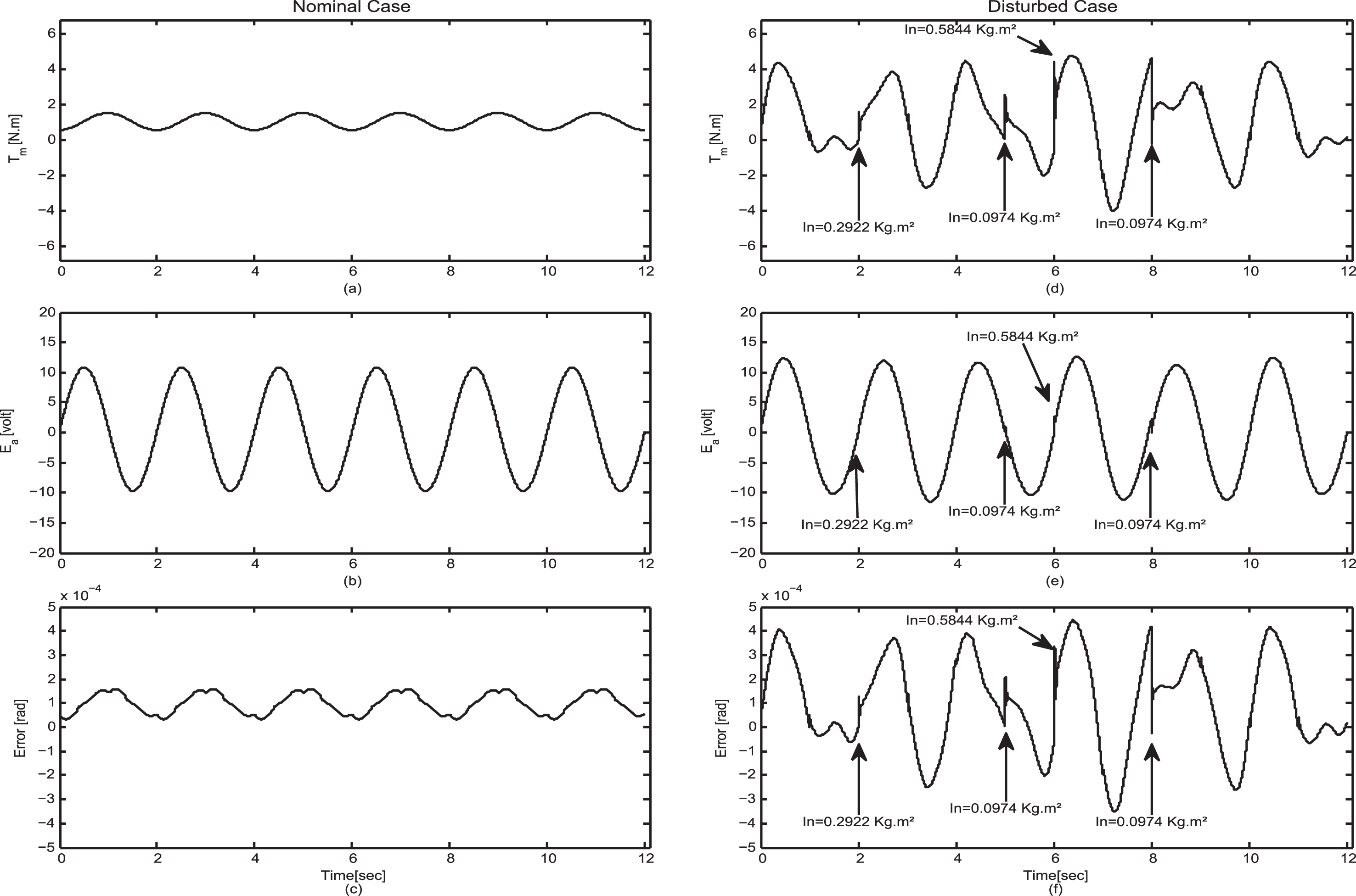
Tracking performances and control activities of the PD controller. (a)-(c) Nominal Case, (d)-(f) Disturbed Case.
The motor torques and the input voltages are well within the ranges of allowable value for both controllers, and at all cases, in particular, [-5.29 5.29][N·m] for motor torque and [-24 24][V] for the input voltage. It can be seen in Fig. 9(d)-(e) and Fig. 10 (d)-(e) that both controllers have produced a sinusoid-like variations to counter act the motor torque disturbances. In addition to this, there is a Damped oscillatory behavior at the instants of the abrupt change of the inertia (2s, 5s, 6s and 8s) but without deteriorating the tracking performance.
At the nominal case, the tracking error of the PD controller reaches 0.36 degrees while it reaches only 0.01 degrees for the obtained FLC. Actually, the PD controller shows a maximum tracking error of 36 times larger than that of the obtained FLC. At the disturbed case, the maximum tracking error of the PD controller has now increased from 0.36 to 0.63 degrees which is still acceptable. While for the designed FLC, it is increased from 0.01 to 0.03 degrees, which is very small considering the large sudden inertia and the presence of the motor torque and friction disturbances. It can be concluded that the performance of the control system can be improved greatly by using the linguistic FLC designed by the proposed evolutionary algorithm.
Additional simulations were performed to see the performance of the obtained linguistic FLC in high speed tracking. We set to the DC motor another desired trajectory with increased velocity. This trajectory is described by:
The simulation results of the obtained FLC and the conventional PD controller, under the same conditions as for the previous trajectory, are presented in Fig. 9 and Fig. 10. It is quite evident, from the simulation results shown in Fig. 11(c) and Fig. 12(c), that the obtained FLC gives better tracking performance than the conventional PD control as a maximum tracking error of about 0.01 is observed for the FLC versus 0.62 degrees for PD controller. The results illustrated in Fig. 12 (d)-(f) exhibit motor torque and voltage saturation when the inertia is increased 6 times; and only a torque saturation as effect of the coulomb friction at about 10 sec. The maximum error tracking of the PD controller reaches 4.18 degrees. Therefore, we can realize that the PD controller fails to fulfill the quite demanding control challenge imposed by the fast tracking trajectory and the different types of disturbances. While the effects of the added disturbances are clearly evident in the angular position errors, the obtained FLC successfully maintains the position error in a very satisfactory tolerance [-0.02 0.025] degrees without voltage or torque saturation, Fig. 11(d)-(f).
Fast tracking performances and control activities of the obtained FLC. (a)-(c) Nominal Case, (d)-(f) Disturbed Case.
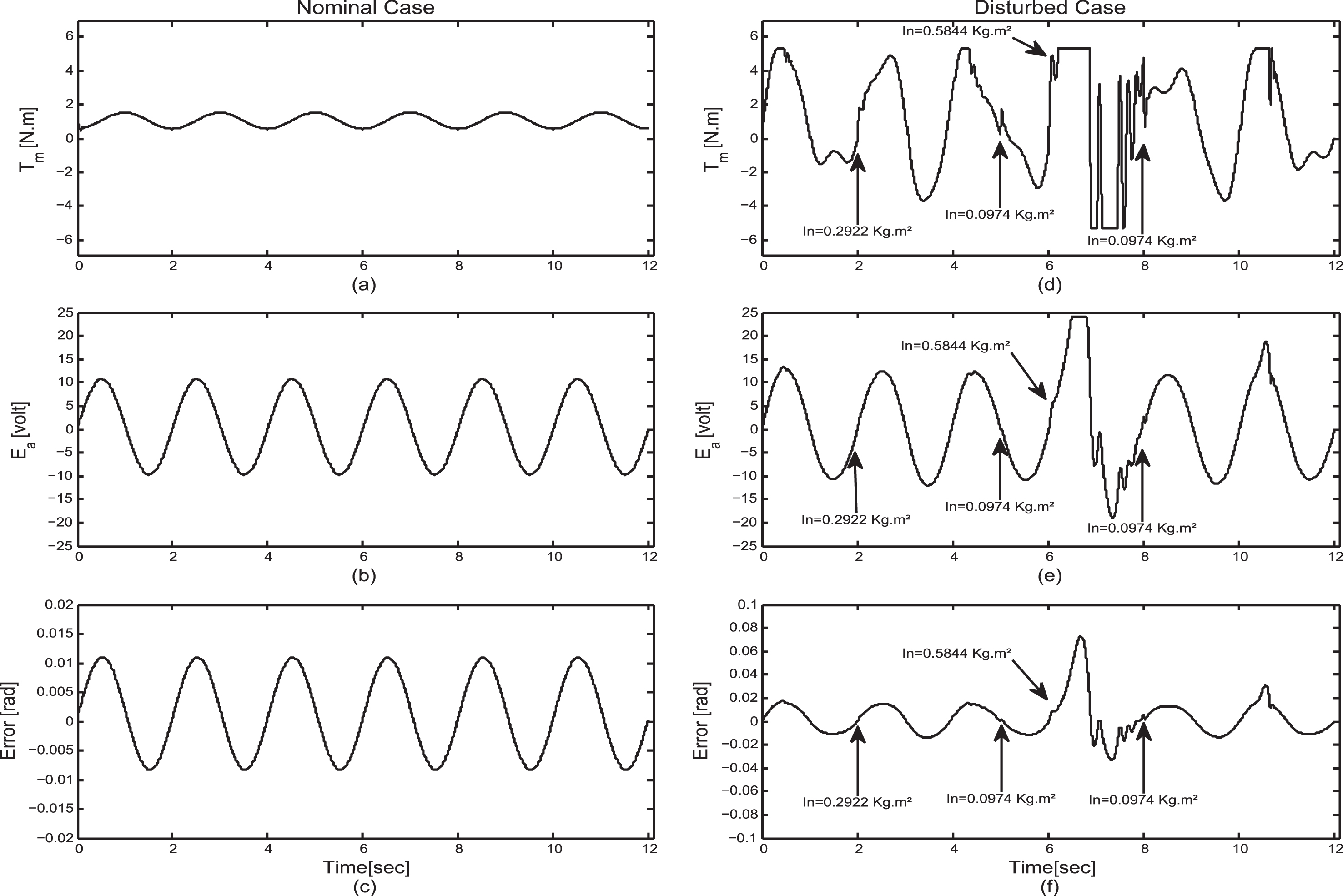
Fast tracking performances and control activities of the PD controller. (a)-(c) Nominal Case, (d)-(f) Disturbed Case.
The obtained linguistic FLC proves again its superiority on PD control.
This work addressed the issue of taking into account the semantic-based interpretability besides the accuracy in the evolutionary linguistic fuzzy controller design for direct-drive DC motor. The main characteristics of our evolutionary design technique are the use of the overlap-based encoding strategy and the use of dependent searching ranges for MF parameters to ensure the evolving of valid and interpretable FKBs.
Unlike the proposed to date methods for this issue, the proposed design technique has the advantage of simplifying the design process of interpretable linguistic FLC by accommodating the semantic-based interpretability in the evolutionary process and focusing on the optimization of the accuracy alone.
Simulations were conducted to assess the validity and usefulness of the proposed IEA. The results obtained suggest that the proposed IEA is efficient in evolving only interpretable and valid linguistic FLCs. They also show the excellent dynamic performance of the evolved FLC for different operating conditions which reflects the nonlinear character of the designed linguistic FLCs.
The proposed method can be extended for several classes of MFs (eg., trapezoidal, Gaussian, bell-shaped, etc.) and possibly for fuzzy model design. Future work will investigate the stability analysis and the robustness enhancement of the evolved FLC, as well as comparisons to other advanced controllers.