
Abstract
In recent years, networked control systems (NCS) have attracted considerable attention due to their potential in addressing the challenges of modern control problems in various domains. Developing NCS to automate and control physical processes in such scenarios are often met with a multitude of engineering challenges both at the networks and control aspects of the system design. Along with data security, securing NCS against possible adversarial activities is critical to ensure system stability and operator safety. In this work, we leverage a framework from evolutionary biology called the Lotka-Volterra (L-V) competition model to analyze the impact of time-delays in an NCS compromised by an adversary. Our analysis reveals that the additional-time delays introduced by the adversary negatively impact NCS stability. We further propose a fuzzy logic based defense mechanism to compensate for the time-delays introduced by the adversary. Evaluation in MATLAB/Simulink based TRUETIME simulation test-bed demonstrates the effectiveness of our approach in securing the NCS against adversarial time delays.
Introduction
Recent years have witnessed a growing interest in networked control systems as an effective approach to automate and control complex industrial processes. A networked control system (NCS) is primarily a control system architecture wherein the subsystem components are spatially distributed over a shared communication network. The controller, sensors, and actuators which constitute the NCS interact over the network to facilitate stable control of a physical process. The feedback and control signals, essential for the functioning of the system are exchanged among the subsystems through data packets. The use of a shared communication network to interconnect spatially distributed components leads to several advantages such as reduced system complexity, flexible implementation, ease of upgrade and maintenance along with improved control performance over traditional designs [30].
As NCS incorporate various heterogeneous components to establish distributed control, it is often subject to numerous design challenges. These challenges stem from various uncertainty in network bandwidth, network delays, packet drops and signal interference. These factors degrade system performance and adversely impact control system stability [12 , 23]. Extensive research has been performed to mitigate the problems in NCS resulting in the development of numerous control methodologies [19]. These strategies aim to ensure the reliability and security of communications while simultaneously coping with system constraints. Typical constraints include signal jamming, time-varying transmission, sampling intervals, and data quantization issues.
Among NCS design challenges, network-induced time delays are particularly important as they play a crucial role in determining the stability of the system. In control theory, stability is defined as a measure that relates a system’s response to the inputs. System stability is usually characterized in terms of stability margin. A system with a narrow stability margin is less stable compared to one with a wider margin. Delays in the control loop adversely affect the system stability by narrowing the stability margin of the control system [11]. Besides stability, security is of paramount concern in NCS design. The application of NCS in diverse fields such as power distribution, agricultural and manufacturing sectors, makes them vulnerable to numerous kinds of cyber-attacks [10]. For example, an adversary can subvert the communication network of an NCS to introduce redundant data packets to cause network congestion, leading to additional time-delays in the network. For a tightly calibrated NCS operating in a mission-critical facility, additional delays may give rise to system stability issues causing damage to the equipment, injuries or even loss of life for the operating personnel.
NCS is composed of many cooperative subsystems such as sensors, actuators and controllers that share network resources. This scenario is analogous to biological systems where multiple species co-exist in an ecosystem and compete with each other for resources. Consider the case of an adversary that floods the network with data packets to cause network congestion. The legitimate subsystems suffer from reduction in bandwidth due to this adversarial action. If bandwidth is treated as a finite resource, the case similar to biological ecosystems wherein a species consuming all the resource (such as food) for itself adversely affects the survival of competing species. In evolutionary biology, a family of differential equation models called the Lotka-Volterra (L-V) equations is used to capture the interactions between two or more competing species. In this work, we apply the L-V model to analyze an NCS compromised by an adversary. The competing species in our proposed approach comprise of legitimate NCS subsystem components and the adversary. Further, we model and analyze the impact of time-delays on the stability of NCS using root locus stability plots. Based on our model, we develop a criterion for stability of NCS in relation with time-delays, which is verified through simulations in a MATLAB based TRUETIME test-bed [4]. We further propose a fuzzy logic based intelligent modulator to secure the system against the delays introduced by the adversary. Evaluation of the proposed mechanism shows that our approach is capable of stabilizing the NCS at the cost of reduced system performance.
Related Work
System stability issues resulting from network delays necessitates the development of mechanisms to ensure stable control of NCS. The NCS control mechanism depends on the type of network configuration and NCS application. Further, the delays encountered in various NCS settings are unique for each control scenario. The distinctive nature of delays calls for different strategies to ensure stable control of NCS across different settings. A survey by Zhang et al. [28] presents some recent advances in NCS design to cope with time-delays, packet losses, and data quantization. Techniques such as delay compensation, analysis of variable delays, timing problems of real-time implementation of NCS, Markov methods for time-varying delays are discussed. The summary by Y-Ke-You et al. [14] highlights various techniques based on graph theory and sampling theory for designing NCS.
In recent years much effort has been devoted to develop techniques for robust control of NCS. Fridman et al. proposed a technique using input delays for robust sampled data control [5, 6]. Gao et al. discovered that the performance of sampled data control techniques can be improved by selecting the appropriate sampling periods [7]. This principle was used in the sampling time scheduling methodology developed by Hong [13]. To account for the stochastic nature of NCS signals in controller design, Nillson et al. used a Markovian jump system using an LQG optimal controller [18]. Notably, Walsh et al. [21 –23] used non-linear and perturbation theories to develop stable control over periodic and random delay networks. Time-delay system approach proposed by Gao et al. used the closed loop of NCS as a system having time-varying delays [8]. Gotkas et al. [9] used robust control theory to develop controllers for NCS. In their approach, queuing mechanisms are used to transform random network delays to deterministic delays. The control problem thus reduces to the control of a time-invariant system as proposed by Luck and Ray [16, 17]. This methodology uses an observer-predictor mechanism utilizing first-in-first-out (FIFO) queues.
Fuzzy logic has successfully been applied to challenging problems in the areas of filtering and control in networked industrial control systems. Almutairi et al. [1] uses a combination of fuzzy logic and proportional integral controller to compensate for the effects of delays. The controller gain parameters need to be updated externally to compensate for the output errors caused by delays. The Takagi-Sugeno (T-S) fuzzy models have been incorporated into filtering problems in non-linear distributed systems. Wang et al. [26] proposes a technique that utilizes fuzzy logic for filtering in non-linear distributed networked industrial processes. In this method, the T-S model is used to describe the non-linear industrial processes. The sensor measurements in the plant are subject to network delays, stochastic disturbances, and packet drops. The stochastic stable filters that satisfy the prescribed H∞ filtering performance index are designed for the multirate system based on the T-S modeling technique. Wang et al. [27] uses T-S fuzzy models to address the control problem nonlinear industrial processes. In this work, the nonlinear plant is modeled using the T-S fuzzy model, and networked fuzzy controllers keep track of the subsystem outputs. To counter the packet dropout phenomenon, a compensator is constructed that dynamically regulates the output set-points. Wang et al. [25] investigates the design of a finite frequency fixed-order output feedback controller using T-S fuzzy systems. Using T-S models, they designed a memory piece-wise affine (PWA) output feedback controller that is stable with prescribed finite frequency H∞ performance. Wang et al. [20] designs a stable T-S controller for a closed loop system subject to packet dropouts. The effectiveness of the proposed solution is illustrated with simulation examples. In Table 1, we highlight the major advantages and disadvantages of popular NCS control methodologies with our proposed approach.
Comparison of NCS control methodologies
Comparison of NCS control methodologies
The H∞ filtering technique has been widely used to address disturbances in finite frequency domains. Wang et al. [24] proposes a variant of H∞ filtering technique that uses parameter-dependent Lyapunov functions along with past output measurements to design filters for dynamic discrete-time systems subject to uncertainties in the finite frequency domain. Analysis of the proposed technique reveals an improvement in system performance with the use of past output measurements.
The Lotka-Volterra model has been utilized for congestion control in wireless sensor networks and autonomous decentralized networks [2, 3]. Liau et al. [15] used the L-V model for the analysis of competition among cognitive radio networks.In contrast to existing works in the literature, our approach uses the L-V competition model for stability analysis of NCS. We use this model to capture the interactions between NCS subsystem components and the adversary. A hybrid fuzzy-PID controller is developed to secure the system from time-delays introduced by adversaries.
Networked control systems
NCSs are typically composed of a closed loop of sensors, actuators, and a controller used to manage and regulate the behavior of a physical process. The NCS subsystems are usually placed at different locations in the plant. The subsystems interact with each other through a shared communication network which is used to disseminate NCS signals. A typical NCS is described in Fig. 1 where u (t) and y (t) are system signals.
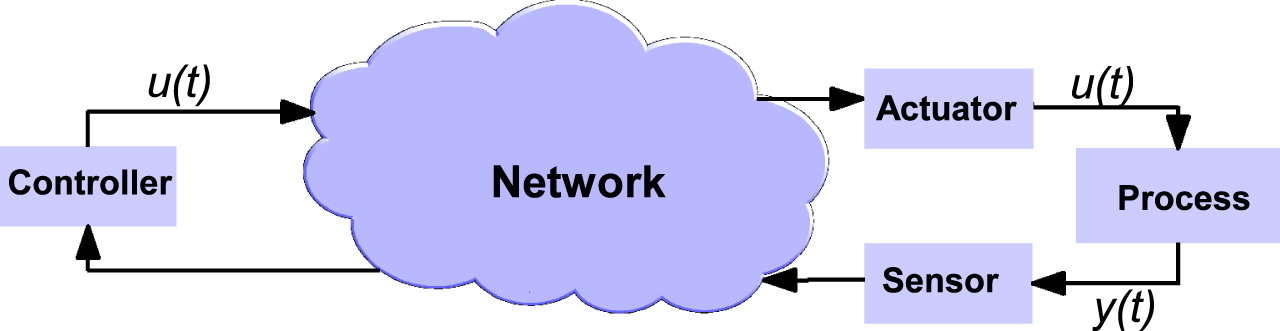
Overview of NCS.
NCSs typically function with real-time constraints which require the data packets to have prescribed deadlines. Thus NCS and subsystems have limited time to respond to system signals. Based on time constraints, the system can be classified as soft, firm and hard real-time systems (RTS). For soft RTS, the packets that miss the deadlines are tolerated in the system. This does not cause severe consequence for NCS operation. For firm RTS, deadline overruns render the packets unusable, and the system computation becomes obsolete. Hard RTS are safety-critical systems where deadline overruns cause system failures with potential catastrophes.
The data transfer between the controller and subsystems in NCS generate network delays in addition to the processing delay at the controller. NCS network delays can be classified in the following manner Sensor-to-controller time-delay D
sc
- The delay caused as the packet traverses from the sensor to the controller. Controller-to-actuator time-delay D
ca
- The delay caused as the packet moves from the controller to actuator. Controller processing time delay D
c
- The delay taken to process the data packet at the controller.
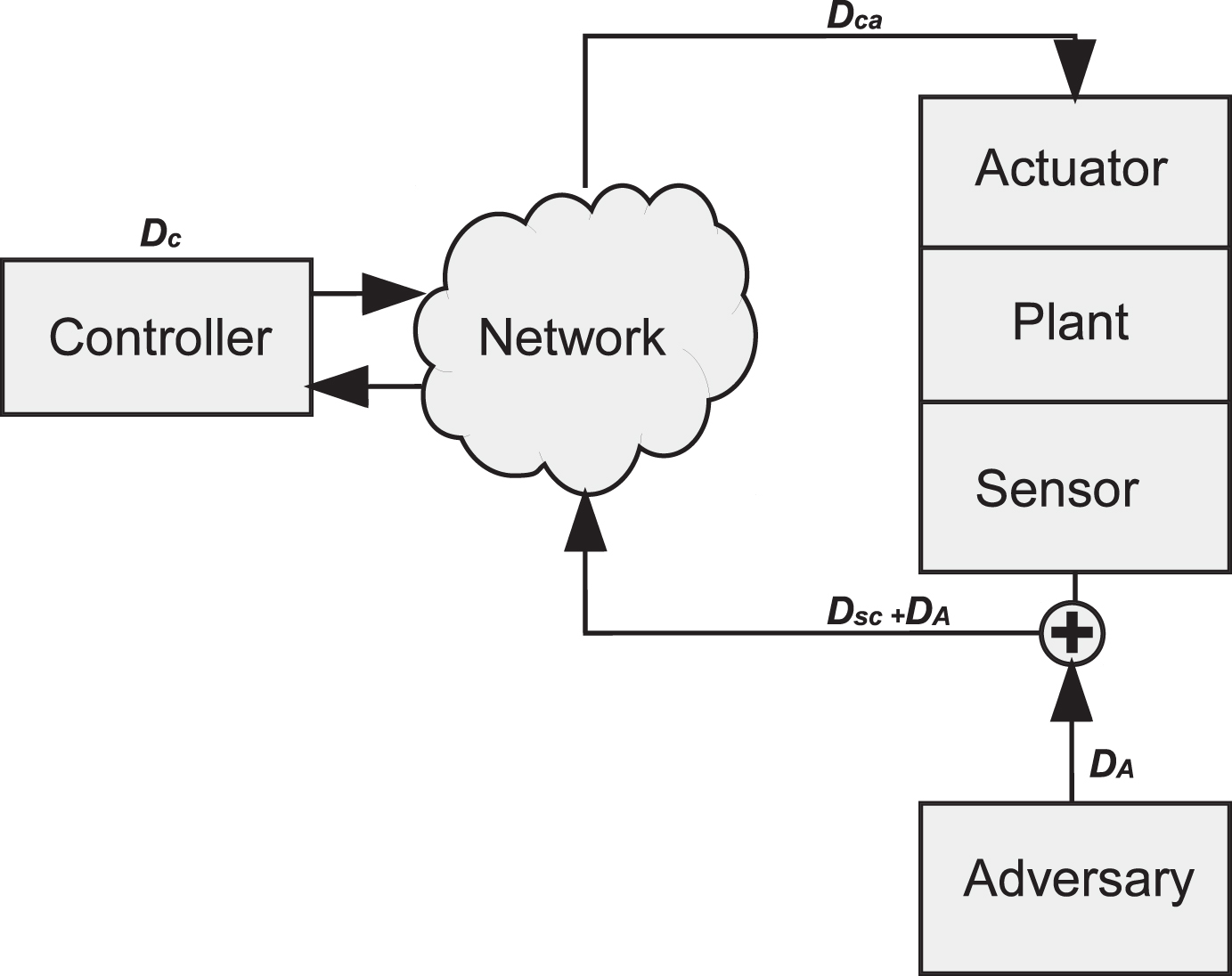
Delays in NCS.
The total time-delay in a networked control system (D
ncs
) is calculated as the sum of time-delays incurred by the data packet in traversing the sensor-actuator-controller loop as shown in Fig. 2. The total system delay D
ncs
is expressed as
In the presence of an adversary the above expression gets modified as
Where D A is the delay introduced in the network by the adversary.
Often in many biological systems, there exist interactions between two-or-more living species. These interactions are primarily the predator-prey interaction and inter-specific competition. In predator-prey interaction, one species called the predator forages and consumes another organism called the prey. In the absence of predators, the prey population may grow exponentially and disrupt the ecological balance. However, the predators keep a check on prey population by suppressing their population growth. Conversely, When prey becomes scarce, the predator population suffers as they die of starvation or in the worst case, becomes extinct. Foxes-rabbits, lions-gazelles, polar bears-seals are typical examples of predator-prey interaction.
In contrast to predator-prey interaction, the inter-specific competition refers to the competition among two or more species for a finite resource. The finite resource is usually food, mates, nesting sites or any resource for which there is a higher demand compared to supply. When one species competes and obtains an increasing share compared to others, its population increases. Consequently, the population of the other species falls due to the negative impact of the competition. In this work, we use the L-V equations for inter-specific competition among competing species. In our model, the NCS is considered to be analogous to an ecosystem. An ecosystem comprises of multiple species that live together and interact with each other as well as the nonliving parts of their surroundings (i.e., resources) to meet their needs for survival.
In its fundamental form, the L-V model consists of a set of two differential equations. These equations describe the interaction of two biological species competing for resources in an environment. We illustrate the model with an example. Consider two species, “species 1” and “species 2” competing for a specific resource in an ecosystem. We assume that the population growth follows a logistic growth model. The following equations describe the population growth of species
For species 1
For species 2
Analysis of NCS is often challenging due to the increased system complexities arising from the combined interaction of computing, network, sensor and actuator elements. We explore the possibility of utilizing the L-V modeling technique to capture the interaction among NCS subsystems. We model NCS as an ecosystem that connects a wide variety of habitats such as sensors, actuators, and controllers through a shared communication network. The habitats are outlined by the species that reside in them. For example, the sensor habitat includes the sensors that measure real-time physical quantities necessary for plant operation. Adopting the analogy of an ecosystem for NCS enables the modeling of interactions among the subsystems and malicious attackers as competition for network bandwidth.
From the perspective of the L-V competition model, the control loop can be considered to be analogous to the ecosystem that supports the biological species. The NCS subsystems interact with each other with the strategy to maximize the bandwidth utilization and throughput. The adversaries are perceived as the species that operate with a contrasting strategy to that of the legitimate subsystems. The carrying capacity of the ecosystem is comparable to the network bandwidth of the NCS. The adversaries and the subsystem components are analogous to species competing for bandwidth.
We extend the ecosystem analogy to the NCS using L-V model to gain insight into the dynamics of the system for developing solutions that offer improved security and stability.
Impact of delays on NCS stability
In this section, we describe the impact of delays on the stability of NCS. We introduce the root locus technique for system stability analysis followed by the step responses of an NCS to varying time-delays. The root locus technique is commonly used in control theory to investigate the stability of a closed-loop system. The root locus plots depict all possible trajectories of the poles of the characteristic equation of the closed-loop system in a complex plane. The location of the poles changes with the variation in the system gain parameter. In other words, the root locus plot is a graphical representation of system stability in two-dimensions. From Fig. 3, we observe that, in the root locus plot, numerous root loci appear to move away from the real axis as the system poles traverse from the real to complex values. The root loci cross the first quadrant at specific points on the imaginary axis which differentiates the operation of a stable system from the unstable.
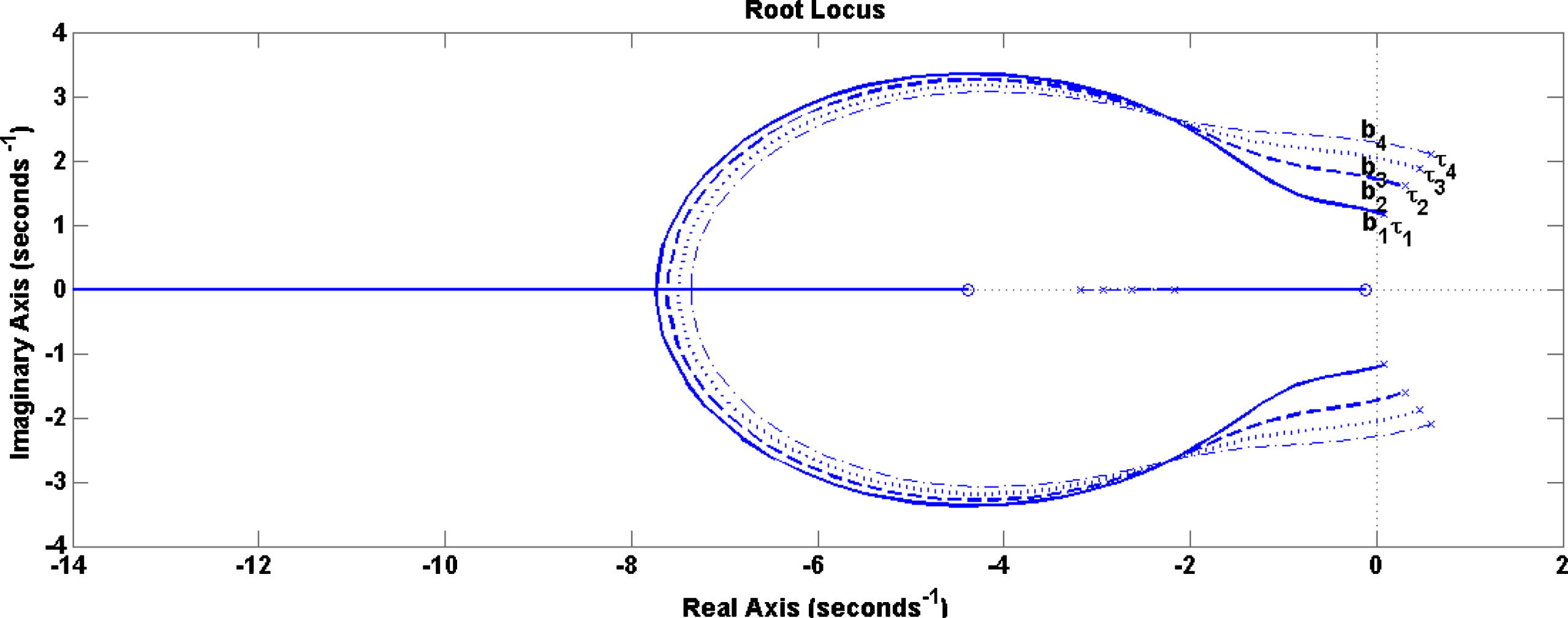
Root locus plot for the delays τ 4 to τ 1.
Delays can destabilize NCS since they contribute to the reduction of the system stability margin. The root locus plot in Fig. 3 illustrates the impact of delays on system stability. We plot the root locus plot of an NCS for four delays τ 4 to τ 1 as given in Table 2 such that τ 4 > τ 3 > τ 2 > τ 1. The delays τ 4 to τ 1 correspond to the total system delay of NCS measured for the simulation in TRUETIME test environment. As evident from the figure, when the delay increases, the root locus bends towards the first quadrant and intersects the imaginary axis at b. From the figure, we observe that the point at which the root locus crosses the imaginary axis is smaller for larger values of system delay which indicates a narrower stability region for systems with larger delays. Consequently, the controller has a smaller range of possible values to stabilize the closed-loop system. The step responses for the four delays are described in Fig. 4. As evident from the figure, oscillations are higher for larger delay values indicating various degrees of instability.
The delays τ 4 to τ 1
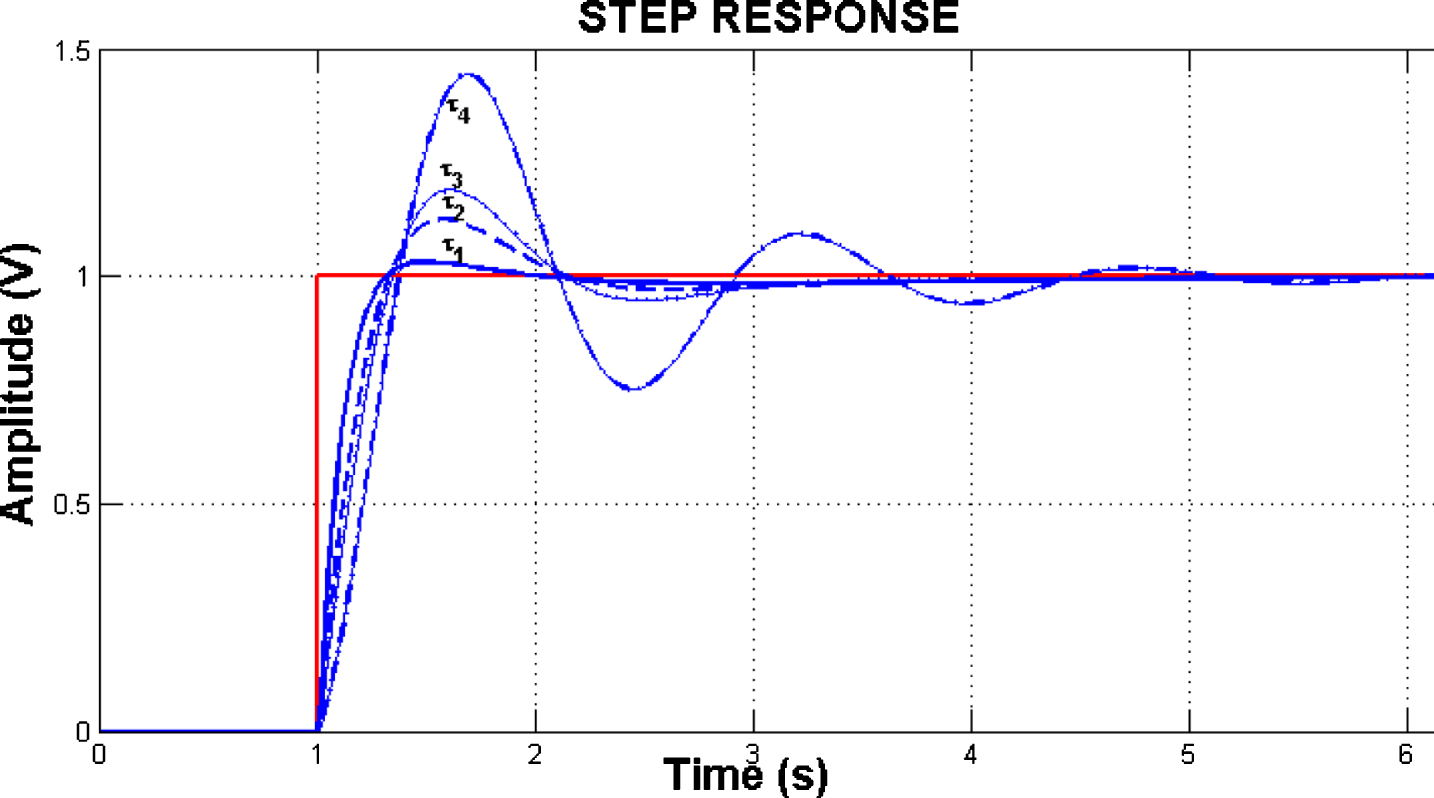
Step-response plots for the delays τ 4 to τ 1.
In this section, we model the time-delay in an NCS using the L-V model. Applying the L-V model to NCS scenario requires the mapping of L-V model parameters to NCS framework. For this purpose, we use the following analogies. The total population of species is viewed as the total delay of the closed-loop NCS The carrying capacity of the supporting environment is regarded as the bandwidth of the specific network path The inter-specific competition among different species of resources is considered as the sharing of bandwidth among the different NCS subsystems.
We model the delay of the closed-loop NCS utilizing the parameters such as channel capacity, available bandwidth, the data rate of the network path using the following expression, which is a form of L-V equation.
D
ncs
is the total delay which is the sum of subsystem delays.
D
ncs
is calculated as D
ncs
= D
sc
+ D
ca
+ D
c
+ D
A
D
A
is the delay introduced by adversary on the network path
C and A corresponds to the channel capacity and the bandwidth used by the system respectively the parameter B is the available bandwidth computed as B = C - A
γ is the ratio of the delay at the controller to the summation of other subsystem delays.
The equation (7) is a first order differential equation of the form
The solution to the differential equation is obtained by substituting v = y
(1-n) and solving for
We observe from simulations that as the value of
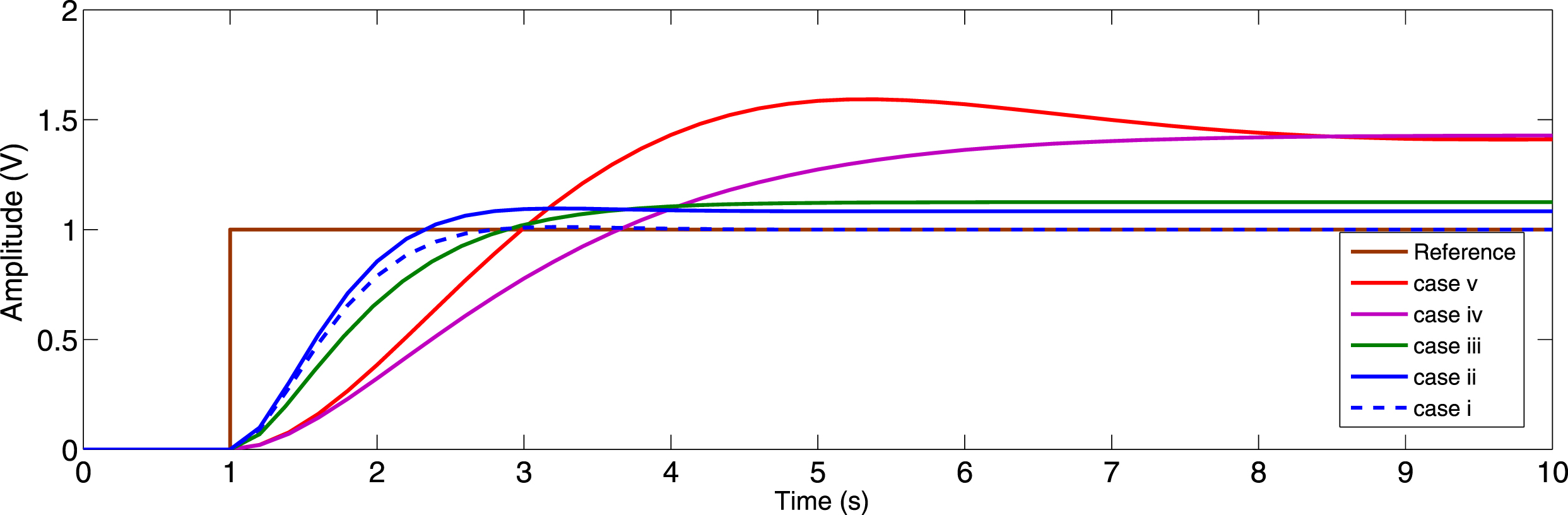
Variation in system step response for different
We compare the control performance of the control method used in our approach (the integrated fuzzy modulator and PID controller) with some of the widely used techniques in the literature. We also estimate the control system performance measures of these techniques in controlling our model NCS. We use the standard step signal to evaluate the control performance of various control methodologies to select the best method for our NCS. The following second order function defines the control process
We design several controllers for the process G (s) and report their performance metrics in Table 4. Based on Table 4, we observe that the PID controller performs poorly in controlling the process defined by equation (9) and thus cannot be used for controlling the NCS. From the table, we observe that the rise time, overshoot and settling time is lower for the hybrid PID-Fuzzy controller. Among the controllers the hybrid PID-Fuzzy controller has better performance metrics compared to other control methodologies. Thus, we choose the hybrid PID-Fuzzy controller for developing our system.
Control Performance of Various Methods
We use MATLAB/Simulink as the test-bed for simulating the NCS as shown in Fig. 6. MATLAB offers an add-on toolbox called TRUETIME to enable the modeling and simulation of NCS. TRUETIME toolbox allows real-time constraints such CPU speed, network-bandwidth, control loop and network delays to be incorporated in system design thus enabling realistic system modeling. TRUETIME allows for the simulation of control systems with support for complex controller timing as a result of code execution, task scheduling, and wired/wireless communications. It features a network block that supports an array of protocols such as Ethernet, CAN, CSMA, TDMA, and FlexRay. We use the CAN protocol for NCS simulation.

NCS simulation test-bed.
We simulate a model NCS using Sensor Actuator Controller Controlled Process Network Block Adversary
The objective of the control problem is to regulate a controlled process with respect to the reference signal. In our simulation, we use a second order system as the controlled process given in equation (9). PID-Fuzzy control is used as the control algorithm. The simulation test-bed uses a time-driven sensor node that periodically samples the process. The samples are sent to the controller node via the network block. The controller computes the control signal based on the deviation from the reference signal. The control signal is sent over the network to the actuator node, where it gets actuated. The setup also involves an adversarial node which interferes with the network communication. The adversary periodically transmits data packets, causing network congestion over the entire network. The channel capacity C and the bandwidth utilized A are 2 mbps and 500 kbps respectively. The simulation is repeated for five different cases of
The delay values for the simulation
The delay values for the simulation
We develop our proposed approach based on the simplifying assumption of a delay compensated NCS model. Usually, NCS are susceptible to unknown network delays which are inevitable, often unpredictable and stochastic. These delays are typically time-varying, large and have an adverse impact on NCS particularly on system stability and performance. In a delay compensated system, the time-delays between subsystem components are compensated using delay-compensation techniques. Many such techniques exist in literature, such as the observer based algorithm, Markov chain based models, probabilistic and deterministic delay compensation models. A delay compensated system is robust to uncertainties arising from timing problems, perturbations, and disturbances in real-time implementations. The delay compensated assumption enables us to explore the impact of adversarial delays on NCS without analyzing the stochastic nature of network-induced delays.
We propose a mechanism based on fuzzy logic to compensate for the random network delay effects. The proposed methodology is described in Fig. 7. The proposed approach uses an intelligent modulator based on fuzzy rules to stabilize the NCS. In the proposed method, the modulator ensures that the value of

Proposed method for securing NCS against delays.

Fuzzy membership function for
Based on Fig. 8, we derive the two fuzzy rules which are expressed as follows If If
Where the factor α is a constant chosen to be less than 1 to ensure stable operation of the system. In our scenario, we use a scaling factor of α = 0.7. The parameter
A hybrid combination of a fuzzy modulator and a conventional PID controller is proposed to defend against adversarial delays. The hybrid system compensates for the delays introduced by the adversary by tuning the PID gain parameters. To achieve tuning, the fuzzy modulator uses a rule base consisting of two rules. The minimal rule base contributes to lesser overhead in terms of processing power, computation time and memory utilized for realizing the defense mechanism on a microcontroller or digital signal processor (DSP). Consequently, the computational burden of implementing the proposed mechanism on a real-time embedded application is expected to be minimal due to the reduced rule base.
We compare the performance of the proposed approach under different values of

Performance of the secured NCS.
The performance indices of the secure system for three test cases are described in Table 7. We observe from Fig. 9 that the system is stabilized with a performance overhead. The ideal value of rising time and settling time is 1. As observed from Table 7, these parameters deviate from the ideal value which indicates performance degradation. Based on our analysis, we conclude that our proposed mechanism stabilizes NCS against delays introduced by the adversary.
Performance indices for the secured NCS
Given that NCS is often complex and dynamic, there exist uncertainties in network traffic and other system parameters. Furthermore, NCS are often susceptible to unexpected failures and perturbations, and such systems defy precise analytic modeling. The proposed fuzzy logic based mechanism may suffer from uncertainties and imprecision that affect real-world implementations of NCS.
Optimization of the fuzzy modulator to achieve better performance involves modification of the fuzzy rules, scaling coefficients and changing the membership functions. This stage is often challenging as modifying these parameters to cope up with specific attack scenarios must be carried out with strict numerical calibration to ensure that system performance and stability is not sacrificed for security against adversarial delays.
The fuzzy controller has the objective of capturing the domain knowledge of a human expert and translating it into an effective control mechanism. Consequently, the fuzzy controller has to be flexible enough to cope with the design issues that stem from human error.
Conclusion
In this work, we examined the impact of time-delays on the stability of networked control systems. Based on stability analysis, we deduced that time-delays are a critical parameter in determining the stability of NCS. The Lotka-Volterra competition model from evolutionary biology has been used to analyze the impact of the time-delays introduced by the adversary on the stability of NCS. Based on the insights from the analysis, we developed a stability criterion for NCS based on time-delays. The criterion was evaluated for different scenarios in TRUETIME software test-bed. We further proposed an intelligent modulator based on two fuzzy rules and PID algorithm to stabilize the NCS against the time-delays introduced by the adversary. To further improve stability, the fuzzy modulator may be updated with additional rules. Evaluation of the proposed mechanism confirmed that our fuzzy logic based modulator is capable of stabilizing the NCS under different operating parameters. As part of the future work, we will extend our proposed system by taking into account the stochastic nature of time-delays followed by real-time implementation in a cyber physical systems test-bed.
Footnotes
Acknowledgements
This work has been supported by the Ministry of Electronics and Information Technology (MeitY), Government of India, under the Visvesvaraya PhD Scheme for Electronics and IT.