
Abstract
As aerospace technology, computer technology, network communication technology and information technology become more and more perfect, a variety of sensors for measurement and remote sensing are constantly emerging, and the ability to acquire remote sensing data is also continuously enhanced. Synthetic Aperture Radar Interferometry (InSAR) technology greatly expands the function and application field of imaging radar. Differential InSAR (DInSAR) developed based on InSAR technology has the advantages of high precision and all-weather compared with traditional measurement methods. However, DInSAR-based deformation monitoring is susceptible to spatiotemporal coherence, orbital errors, atmospheric delays, and elevation errors. Since phase noise is the main error of InSAR, to determine the appropriate filtering parameters, an iterative adaptive filtering method for interferogram is proposed. For the limitation of conventional DInSAR, to improve the accuracy of deformation monitoring as much as possible, this paper proposes a deformation modeling based on ridge estimation and regularization as a constraint condition, and introduces a variance component estimation to optimize the deformation results. The simulation experiment of the iterative adaptive filtering method and the deformation modeling proposed in this paper shows that the deformation information extraction method based on differential synthetic aperture radar has high precision and feasibility.
Introduction
In recent years, InSAR technology has become an important branch of radar remote sensing discipline [1]. InSAR is widely used in military and civilian fields, such as battlefield reconnaissance, navigation guidance, ocean surveillance, environmental remote sensing, and disaster monitoring. In the deformation monitoring, InSAR technology is also often used to perform differential interference by acquiring two or more scenes before and after deformation. Due to the problem of the maximum deformation gradient of InSAR technology, DInSAR technology is developed based on INSAR technology. DInSAR uses the phase of the same monitoring area acquired by two different positions of the radar, and the differential interference obtains the deformation information. The differential interferogram of the radar image can be used to monitor centimeter or smaller earth surface deformation. Therefore, this paper studies the deformation information extraction method based on differential SAR radar interference in the field of deformation monitoring and radar remote sensing technology and other important theoretical and practical significance.
In InSAR technology, the US military first applied airborne SAR interferometry to topographic mapping in 1971, using phase difference images to obtain elevation information [2]; in 1985, a team led by Dither Massonnet of France conducted a project. That is, there is no need to place any equipment on the ground, and the use of satellites to measure the movement of the ground from a few hundred kilometers away from the ground (the deformation caused by the structure) [3]. In terms of DInSAR, Gabriel equalized the surface subsidence monitoring experiment in California’s watering area with Seasat L-band in 1989, and first verified that DInSAR technology can achieve centimeter-level accuracy [4]. Massonnet et al. used the ERS-1 SAR image in 1993 to obtain the earthquake-induced ground deformation field in the Larders area in 1992. Compared with the results obtained by fitting the elastic deformation model, the coincidence is good [5]. Ge L L is equal to 2004 to try to interpret the ground deformation information obtained by DInSAR using GIS method. Specifically, the ground subsidence data obtained by DInSAR and the mining geological engineering map are superimposed and analyzed to verify the effectiveness of DInSAR technology [6]. In 2007, Ge L L used radar images from different platforms to perform measurements in a coal mine in southwestern Sydney. It was found that the JERS data source with L-band is relatively less affected by time-related factors [7]. In China, the research and application of InSAR and DInSAR began in 1997. Wang Chao et al. published an academic introduction in February 1997 on the basic principles of interferometric radar and its application in geoscience research [8]. In the same year, Wang Chao studied the three-dimensional terrain modeling of InSAR, and used SIR-C SAR data for interference processing, obtained the interference data of the Kunlun Mountain area, and established the DEM of the area [9]. Zhang Jingfa et al. introduced the application of InSAR and DInSAR in seismic geology, and measured the coseismic deformation field of the Landers earthquake in the United States and the Grevena earthquake in Greece using DInSAR technology [10]. Liao Mingsheng et al. studied the complex-domain adaptive filtering method of InSAR interference fringe pattern and proposed a median-adaptive smoothing filtering scheme [11]. Lu Xu et al. used the ERS-1 /2 satellite SAR data from Tianjin to perform differential interference processing, obtained surface subsidence in the Tianjin area, verified the reliability of the results by comparing with the level data [12]. Li Zhenhong et al. systematically studied and derived the influence of phase observation error, terrain error and satellite orbit error on the measurement results in InSAR and DInSAR data processing [13]. Wu Lixin et al. comprehensively analyzed the technical advantages of DInSAR applied to the monitoring of mining subsidence, and elaborated on data acquisition, processing methods and accuracy and reliability evaluation [14]. In 2009, Deng Kazhong used the 5-view ERS-1 /2 image to carry out the DInSAR surface subsidence monitoring test at Peicheng Mine, and compared with the field observations, obtained the difference between the field observations and the DInSAR results [15]. In 2010, Yang Chengsheng et al. used two ENVISAT ASAR images to conduct experiments in Shenmu Mine, Shaanxi Province, and interpolated the results to improve the deformation gradient [16]. In 2013, Zhu Jianjun tried to combine the interference pair and probability integral method prediction model acquired by DInSAR to obtain the three-dimensional deformation information of surface subsidence caused by coal development, and carried out simulation test research [17]. Li Zhiwei is equal to the second attempt of the above test in 2015 to simulate the use of a mine in Qianyingyu and Xuzhou, which fully demonstrates the feasibility of the proposed method [18]. In 2013, Fan Hongdong et al. explored the use of DInSAR technology combined with GPS, level and other field observation data to solve the prediction parameters of mining subsidence [19]. In the same year, Zhao Chaoying first applied offset tracking technology combined with DInSAR technology in coal mining settlement observation, and obtained deformation detection accuracy of approximately 4 m [20]. Zhao Chaoying is equivalent to exploring the phase obtained by using different resolution SAR images in 2014, and jointly removing the recovery algorithm for monitoring, to increase the DInSAR technology can detect the deformation range [21].
Because of the limitations of DInSAR applied to deformation monitoring, in recent years, scholars have proposed time-series InSAR techniques based on DInSAR, such as permanent scatterer method (PS), short baseline set method (SBAS), and corner reflector method (CR), and successfully applied to long-term large-scale deformation monitoring. To suppress the influence of the atmospheric delay phase on the monitoring results, it can be weakened by accumulating the average SAR interferogram phase [22]. To increase the density of the interference target, the artificial angle reflector method uses the artificially manufactured strong reflector as the radar monitoring object, and reflects the deformation characteristics according to the interference phase change [23].
InSAR technology can obtain large-scale three-dimensional topographic information of the Earth’s surface all day, all-weather and near real-time. It has high spatial resolution and is not sensitive to atmospheric and seasonal influences. It can be used for digital elevation model establishment and crustal deformation detection. The DInSAR technology developed based on InSAR is a technique for acquiring change information from the phase information of the composite aperture radar complex image, and is an extension of the synthetic aperture radar satellite application. It uses three observations (two interferograms) to perform small motion or change measurements, which are sensitive to moving targets with an accuracy of the order of millimeters. DInSAR technology is a space observation technology that has been rapidly developed in recent years. It has all-weather, large-area, high-resolution, high-precision characteristics, and can effectively complement traditional deformation monitoring methods. Therefore, it is widely used in terrain change measurement, topographic mapping, military applications, crop growth changes and many other fields. For example, Camec et al. used DInSAR technology to monitor the subsidence of coal mining in Gardanne, and achieved good results [24]; Cao Li et al. used the Fengfeng mining area in Hebei Province as an example to apply DInSAR technology to surface deformation monitoring. The results show that DInSAR technology is suitable for a wide range of surface subsidence monitoring [25]. It can be seen from the research results at home and abroad that DInSAR technology can be applied to the field of deformation monitoring.
DInSAR is susceptible to errors such as spatiotemporal coherence, atmospheric delay and elevation, and the accuracy of deformation monitoring is limited. Because of this, this paper first studies the measurement principle of DInSAR technology deformation, and analyzes it from the DInSAR technology principle, data processing flow and main error analysis respectively. Then it proposes an interference graph frequency domain iterative adaptive filtering algorithm, which passes the pseudo-coherence map of the interferogram is used to determine the filtering parameters, which is theoretically more reasonable. In particular, the discontinuous deformation and the noise of the full-resolution interference are strong, and iterative filtering is required. Finally, the focus is on modeling the deformation information extraction. A deformation modeling based on ridge estimation is a regularization constraint and introduces a variance component estimation method. The comparison experiment between iterative adaptive filtering algorithm and Goldstein filtering algorithm shows that the proposed iterative adaptive filtering method has a better filtering effect. The experimental analysis of deformation modeling from three aspects of time overlap, the versatility of deformation constraint model and noise shows that the deformation model has certain advantages in all aspects.
Deformation measurement principle and modeling based on differential synthetic aperture radar interference
Differential synthetic aperture radar interferometric deformation measurement principle
DInSAR technology uses two interferograms or one interferogram combined with a high-precision digital elevation model (DEM) to measure small deformations of the earth’s surface. Suppose that there are two image maps S1 and S2 in the same area, and an interferogram is generated by interference processing. The interferogram contains topographic information and surface micro-deformation information, and another image S3 of the same region is acquired at another time. By interfering with the first image map S1, a second interferogram is generated, which includes topographic information and surface micro-deformation information. Further interference processing is performed on the two interferograms, that is, the topographic information is removed from the second interferogram, and the micro-shaped variable information of the surface in the latter two images S2 and S3 is obtained. Or the first interferogram can directly remove the topographic information by using high-precision DEM, and the micro-shaped variable information of the surface can also be obtained. S1 and S2 are the positions where the satellite antenna images the same area. When the first SAR image is acquired at time S1, the signal returned by the surface P point is:
The interference fringe pattern formed by the S1 and S2 imaging moments contains two parts: the terrain information of the area and the surface deformation information in the two observation times.
Usually in the process of DInSAR, according to the number of SAR images that can be divided into different processing methods, there are two-track method, three-track method, four-track method and very short baseline method. Among them, the two-track method was first proposed by Massonnet [26], and its basic idea is to use the known external DEM to remove the terrain phase information.
Iterative adaptive filtering of interferogram
Katsaggelos studied the theory and method of iterative image restoration, mainly studied the algorithm of the iterative restoration of intensity graph, convergence and various solving problems with constraints or prior information, and the iterative filtering of the phase interferogram studied in this section. The adaptive factor of the frequency domain Goldstein filter is obtained mainly by an iterative method. The improvement of the above two types of adaptive factors is based on the theory of noise statistics. However, the use of coherent maps to evaluate the quality of interferograms has certain limitations. Second, the estimation of coherent values is inherently biased. Third, in applications, areas where the noise of the interference phase is very severe, especially the visual number. For the lower interferogram, the effect of the primary filtering often still fails to meet the requirements, and multiple filtering is needed. However, it is difficult to effectively determine the filtering parameter of the multiple filtering by using the above three filtering algorithms. To this end, an iterative adaptive filtering algorithm based on an interference quality graph is proposed in this section.
The quality map requirements here are calculated based on the statistical analysis of the interferogram to be filtered, so that it can be updated in the iterative filtering, such as pseudo-coherence map, phase difference and graph or maximum phase gradient map. Here is an example of a pseudo-coherence (pc) whose definition is:
Where φ is the complex phase value of the interferogram and N is the window size used to calculate the pseudo coherence value. Thus, similar to the determination of the improved Goldstein filter parameters, the method for determining the iterative adaptive filter factor is as follows:
Where
Deformation modeling based on differential synthetic aperture radar interference
Hansen’s L-curve method for ill-posed problems (rank deficit, morbidity) has good applicability, can intuitively locate the point with the largest curvature, accurately identify reasonable ridge parameters, and effectively overcome the morbidity of the observation matrix. Its observation equation is:
Where Δ is noise. According to the Tikhonov regularization principle, the solution with the ridge estimate is:
Where P is the weight matrix;
At present, the DInSAR method assumes that the observations of different satellite platforms have the same weight value. However, different platforms have different orbital flight directions and observation space geometry, and the atmospheric delay and random noise of each scene SAR image change during imaging. The use of equal weight solution will result in certain deviations, sometimes not truly reflect the accuracy of different observations. Therefore, this paper introduces the Variance Component Estimation (VCE) constraint deformation solution and uses it to describe the quality of the observation and the accuracy of the evaluation parameters.
It is assumed that there are two types of independent observations in the two-dimensional time-series deformation solution system, and the error equation is:
Filter results of the analog interferogram
Filter results of the analog interferogram
The method performs pre-amplification processing with the weight matrix of the pre-estimation estimation, estimates the variance of the observations with different precisions after the adjustment, and re-weights according to the estimation of the variance to improve the first adjustment. The initial value of the time weight matrix is adjusted again according to the re-determined weight matrix, and so on, until the variances of different systems tend to be consistent. The results of the adjustment processing according to the iterative weighting method are more reliable. The variance component estimation can solve the problem of reasonable weighting of observations, and can effectively reduce the influence of gross errors, and is widely used in DInSAR measurement.
Data source
To make the experimental data consistent with the real deformation scene, this paper uses the two-dimensional Gaussian function to simulate the vertical linear deformation rate field and deformation component. The rationality and feasibility of the proposed method are verified by comparing the deformation model proposed in this paper with the deformation model only using regularization.
Evaluation criteria
(1) Sum of Phase Standard Derivative (SPSD)
The SPSD can reflect the smoothness index of the phase, and the smaller the value, the smoother the phase. The formula is as follows:
Where φ (i, j) is the phase value of a point,
(2) Edge Preservation Index (EPI)
The EPI can reflect the ability to maintain the edge information of the filtered interferogram. The closer the index is to 1, the closer the filtered phase map and the reference phase map are to the gradient and edge information. The formula is as follows:
Where φ s (i, j) represents the filtered interference phase value andφ o (i, j) represents the interference phase value before filtering.
(3) Phase residual point (Residual)
The phase residual means that the phase gradient of the adjacent four-pixel phases of the interferogram is not 0 in a certain direction, that is, there is a residual point.
Analysis and discussion of experimental results
To better verify the superiority of the proposed iterative adaptive filtering method, the Goldstein filtering algorithm and the two iterative adaptive filtering experiments are compared. The evaluation indexes of each filtering algorithm are shown in Table 1.
To more comprehensively evaluate and verify the reliability and accuracy of the proposed deformation model, this paper analyzes the three aspects of time overlap, the versatility of the deformation constraint model and noise. First, the paper uses 95%, 5%, and 0% data of three different levels of time overlap for experiments. To better analyze the applicability of the deformation model in different time overlaps, this paper also compares and analyzes the deformation model using only regularization. The difference between the experimental results and the true values is shown in Table 2. Among them, Mean1, Standard deviation1 and Mean2, Standard deviation2 respectively represent the mean and standard deviation of the difference between the deformation model proposed by this paper and the deformation model using only regularization.
Differences between two deformation models and true values in different time overlaps
Differences between two deformation models and true values in different time overlaps
Since the vertical deformation is generally divided into linear deformation and nonlinear deformation, this paper compares the two deformation types, linear and nonlinear. The results obtained by experiments with different deformation types are shown in Figures 1 and 2.
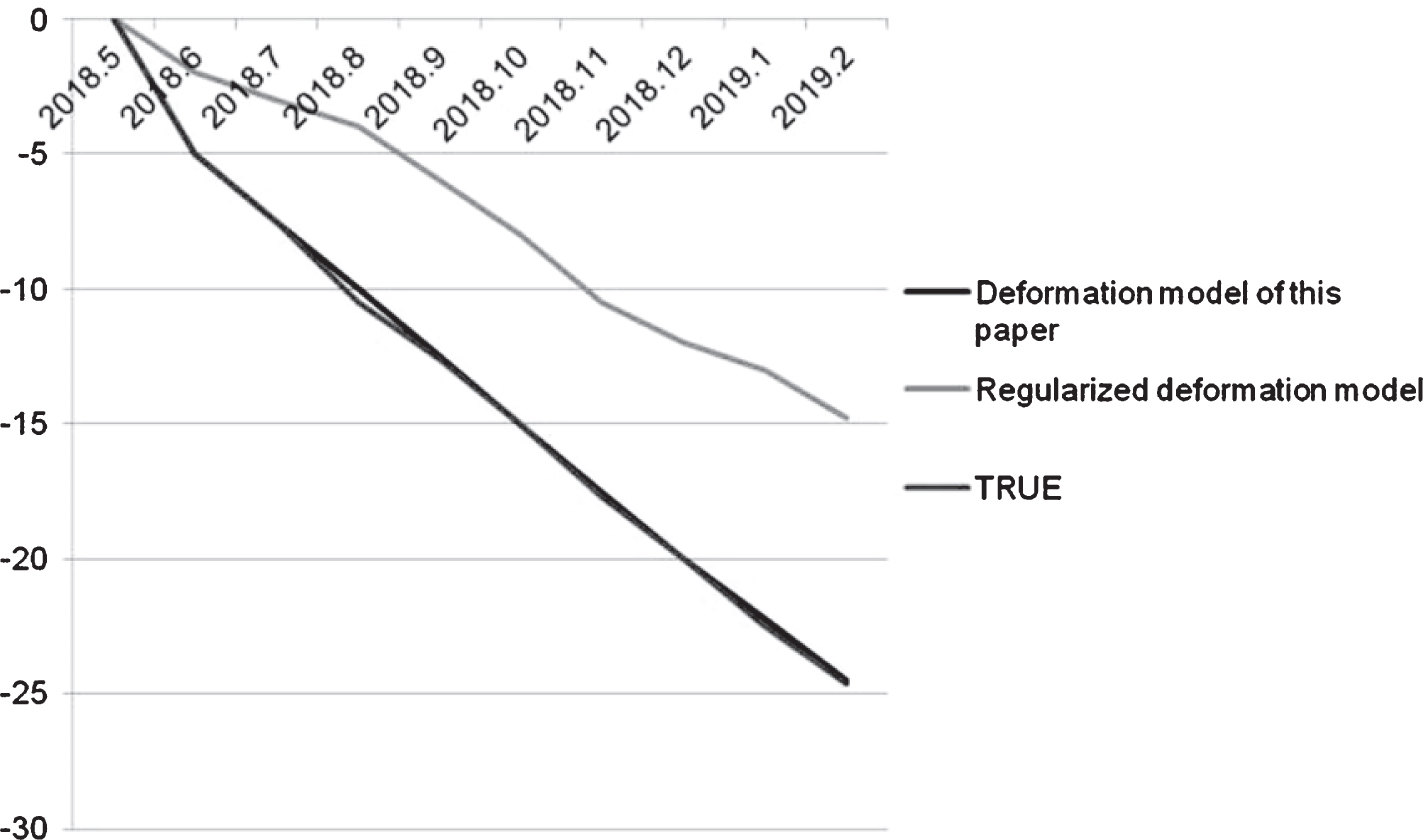
Results of shape variables of different deformation models in linear deformation types.

Results of the shape variables of different deformation models in nonlinear deformation types.
As the noise factor increases, the differential interferogram is more affected by noise, and the lower the definition of the fringes. In this paper, four different 0-means Gaussian noises are applied to the interferogram, and the standard deviations are 0rad, 0.7rad, 1.5rad, and 3.1rad. To better evaluate the influence of different noise levels on two different deformation types, the results of the deformation model in different noise levels are statistically analyzed. The difference between the experimental results and the true values is shown in Table 3.
Differences between two deformation models and true values in different noise levels
It can be seen from Table 1 that the iterative adaptive filtering method proposed in this paper is superior to the Goldstein filtering algorithm. Comparing the filtering results of the iterative adaptive two times before and after, it can be found that the second filtering has a further improvement than the first filtering. The obvious effects of iterative filtering can be proved by SPSD, EPI and residual point evaluation indicators. It can be seen from Table 2 that the deformation model of this paper has higher precision for the data of different time overlap, and its mean and standard deviation are smaller than the deformation model which only uses regularization. The results show that the method and the true value of this paper The trend is more consistent. Observing the overlap of different levels of time, the accuracy of the two methods decreases with the decrease of time overlap, indicating that there is a positive correlation between the time overlap and the correct inversion of the deformation results. In the 0% time overlap, the deformation model accuracy of this paper is still much higher than that of the regularized deformation model. It can be seen from Figures 1 and 2 that the deformation model has high adaptability to different deformation types. The results show that the method is more consistent with the trend of true values. However, only the regularization method is only the optimal in the sense of data. To some extent, it is similar to the filtering effect. It can smooth the deformation result, but sometimes it will increase the degree of deviation from the true value, even Produce the wrong deformation trend. It can be seen from Table 3 that the standard deviation of the deformation model is 5.40 to 9.12, and the standard deviation of the normalized deformation model is 18.54 to 23.78. The results show that the minimum accuracy can be less than 10 under the influence of noise. As the degree of noise increases, the standard deviation of both methods increases and the accuracy decreases. However, in the same noise level, the standard deviation of this method is smaller than that of the regularization method alone, and the accuracy is 3 to 4 times, which indicates that the method is more consistent with the trend of true value.
The experimental results also show that the proposed method has certain advantages in interferogram filtering, time overlap, versatility of deformation constraint model and noise.
DInSAR technology has been widely favored in many fields such as resource survey, ocean monitoring, meteorological monitoring, disaster monitoring, etc due to its all-day, all-weather, high-precision, high-resolution, high repetition frequency and wide coverage. It is a rapidly developing microwave remote sensing technology in recent years. However, DInSAR is susceptible to errors such as spatiotemporal coherence, atmospheric delay and elevation, and the accuracy of deformation monitoring is limited. Therefore, this paper studies the deformation information extraction method based on DInSAR. In this paper, the measurement principle of DInSAR technology deformation is analyzed firstly. Then an interference domain frequency domain iterative adaptive filtering algorithm is proposed. The algorithm determines the appropriate filtering parameters through the pseudo-coherence map of the interferogram. Finally, a method based on the regularization of ridge estimation is the deformation modeling of constraints, and the variance component estimation is introduced to optimize the deformation results. The simulation experiment of the iterative adaptive filtering method of the interferogram and the deformation modeling proposed in this paper shows that the proposed method has certain advantages in the interferogram filtering, time overlap, versatility of the deformation constraint model and noise. The experimental results show that the deformation information extraction method based on differential synthetic aperture radar has high precision and feasibility in the field of deformation monitoring.
Footnotes
Acknowledgments
This work was support by: youth project of science and technology research program of Chongqing Education Commission of China. (No. KJQN201801227). Natural Science Foundation of Chongqing (cstc2019jcyj-msxm1328). The National Key Research and Development Program of China (No. 2017YFC0804704). project of science and technology research program of Chongqing Education Commission of China. (No. kJ1601004).