
Abstract
In this paper, we are presenting a survey of research works dealing with Type-2 fuzzy logic controllers designed using optimization algorithms inspired on natural phenomena. Also, in this review, we analyze the most popular optimization methods used to find the important parameters on Type-1 and Type-2 fuzzy logic controllers to improve on previously obtained results. To this end have included a summary of the results obtained from the web of science database to observe the recent trend of using optimization methods in the area of optimal type-2 fuzzy logic control design. Also, we have made a comparison among countries of the network of researchers using optimization methods to analyze the distribution and impact of the papers.
Introduction
Swarm intelligence is inspired on the study of nature and social species, which enables the design of powerful optimization methods. For example, choreography on school of fish led to the design of the particle swarm optimization algorithm, and studies of the foraging behavior of ants resulted in ant colony optimization algorithms. The main problem in algorithmic development is the design of models to solve complex problems. In this regard, enormous successes have been achieved through the modeling of biological and swarm intelligence, resulting in systems called “intelligent systems”. These intelligent methods include artificial neural networks, evolutionary computation, swarm intelligence, artificial immune systems, and fuzzy systems.
In recent years, there has been an increasing interest in optimizing fuzzy controllers with nature inspired approaches [1]. Therefore, in this paper, a survey about the nature optimization methods used for optimization on Type-1 and Type-2 fuzzy logic controllers is presented. The main idea is to review the most important optimization methods that have been applied in the control area. In Table 1 a summary of the most well-known nature based intelligence optimization methods is presented. However, in this paper we present only the methods used for optimization of the most important parameters in controllers based on fuzzy logic. Also, a brief description of the different methods cited in each analyzed work is mentioned, for example, particle swarm optimization (PSO), genetic algorithms (GA), ant colony optimization (ACO), etc. The main contribution in this paper is to show the importance that optimization methods have been receiving attention for optimizing type-1 and type-2 fuzzy logic controllers, since they improve the results in several applications.
Nature intelligence based optimization methods
Nature intelligence based optimization methods
This paper is organized as follows: Section 2 presents the literature review that was analyzed in this research. In Section 3 a review of type-1 and type-2 fuzzy logic control using optimization methods is presented and finally in Section 4 the conclusions about this work are described.
Nowadays, the use of bio inspired algorithms has become very popular because with them we are able to solve a variety of complex optimization problems.
Therefore, in this Section we are presenting a brief description about the optimization methods mentioned in the reviewed papers.
Ant colony optimization
The ACO metaheuristic is inspired by observing the behavior of real ant colonies, which have an interesting feature; they know how to find the shortest paths between the nest and food. On their way the ants deposit a substance called pheromone, and this trail allows the ants back to their nest from the food; they use the evaporation of pheromone to avoid an unlimited increase of pheromone trails and allow forgetting the bad decisions [2].
Particle swarm optimization
PSO is an optimization method proposed by Eberhart and Kennedy in 1995, inspired by the social behavior of bird flocking or fish schooling [3]. The algorithm is initialized with a population of random solutions and searches for optima by updating the position of particles in the iterations. In PSO, the individual particles fly through the search space by following the current optimal particles [4].
Bee colony optimization (BCO)
In nature, bees would perform a dancing ceremony, which would notify other bees about the quantity of food they have collected, and the closeness of the path to the nest. In BCO, the artificial bees publicize the quality of the solutions, i.e. the objective function value. During the backward pass, every bee decides with a certain probability whether to abandon the created partial solution and become an again uncommitted follower, or dance and thus recruit the nest mates before returning to the created partial solution. During the second forward pass the bees expand previously created partial solutions, by a predefined number of nodes, and after that perform again the backward pass and return to the hive [5].
Bat algorithm
The Bat algorithm (BA) is a bio-inspired algorithm developed by Yang in 2010. BA has been found to be very efficient according to [6]. If we idealize some of the echolocation characteristics of micro bats, we can develop various bat-inspired algorithms or bat algorithms. All bats use echolocation to sense distance, ant they also ‘know’ the difference between food/prey and background barriers in some unknown way.
Genetic algorithms
Holland, from the University of Michigan initiated his work on genetic algorithms at the beginning of the 1960s. His first achievement was the publication of Adaptation in Natural and Artificial System in 1975.
He had two goals in mind: to improve the understanding of natural adaptation process, and to design artificial systems having properties similar to natural systems [7].
Firefly algorithm
Firefly algorithm is classified as a swarm intelligent, metaheuristic and nature-inspired, and it was developed by Yang in 2008 by animating the characteristic behaviors of fireflies. In fact, the population of fireflies show characteristic luminary flashing activities to function as attracting the partners, communication, and risk warning for predators [8].
Cuckoo search algorithm
The Cuckoo Search algorithm is a recently developed meta-heuristic optimization algorithm, which is used for solving problems. This is a nature-inspired metaheuristic algorithm, which is based on the brood parasitism of some cuckoo species, along with Levy flights random walks. Normally, the parameters of the cuckoo search are kept constant for certain duration, these results into a decrease of the efficiency of the algorithm [9].
Type-2 fuzzy logic
Type-2 fuzzy logic emerges as a tool that contains a set of mathematical concepts and methodologies to handle the implied uncertainty contained in the fuzzy sets that describe the linguistic values of fuzzy variables. Type-2 fuzzy logic generalizes the conventional Type-1 fuzzy logic; it can model in a better way the concepts embedded on the rule-based fuzzy systems. In Fig. 1, the Temperature variable contains three linguistic values: Cold, Warm, and Hot. In the case of Type 2, the boundary to delimit the concepts is given through a footprint that describes the uncertainty implied in them, different from the Type-1 fuzzy set in which the boundary is well-defined.

Fuzzy sets in type-1 and type-2 versions.
A type-2 fuzzy set
In general, a fuzzy rule l in a Mamdani fuzzy system can be expressed as:
If one or some fuzzy sets in the rule-based are type-2 then the fuzzy system is Type-2. Figure 2 depicts the basic components of a Type-2 fuzzy system. The fuzzifier operation maps crisp values to Type-2 fuzzy sets, the rules block contains a set of fuzzy rules, and they can be expressed as in Equation 2. In inference block, rules are processed using the mathematics of type-2 fuzzy sets, and this block generated an induced type-2 fuzzy set. Finally, the induced type-2 fuzzy set can be quantified to map it to a type-1 fuzzy set or a crisp value in the output processor.
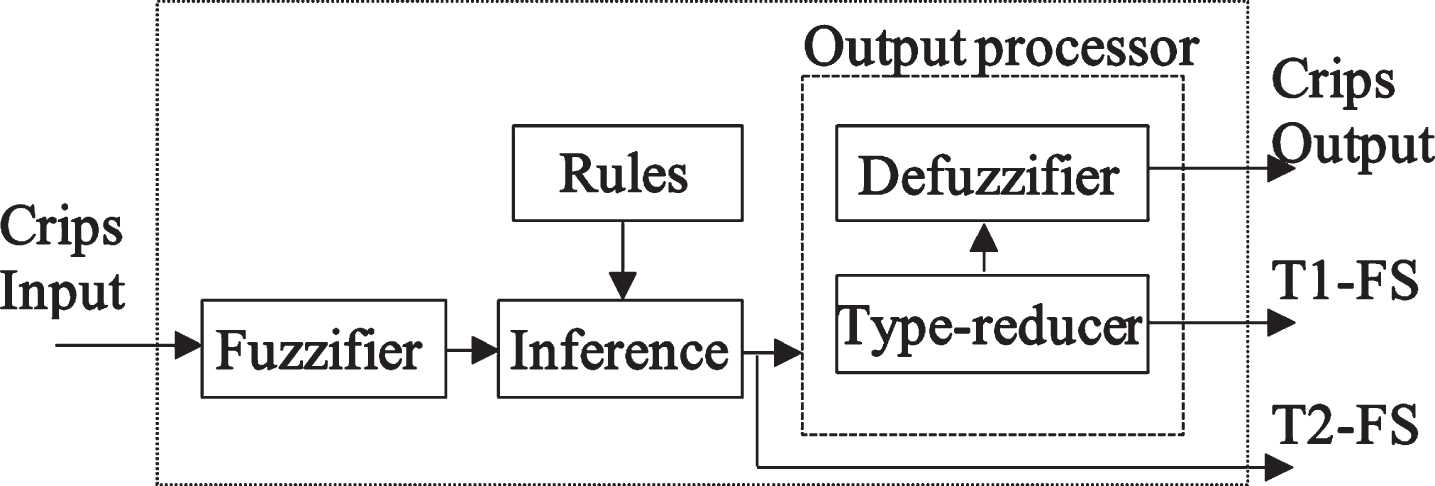
Type-2 fuzzy system.
In this Section a detailed review about the analyzed methods is presented.
In [14] the authors proposed a comparative study of the conventional mathematical and fuzzy logic controllers for velocity regulation. In this case, the authors only made a comparison with different PID controllers without optimization methods. However, the authors have proposed in the future to work with optimization methods to improve the obtained results.
In [15] a type-2 fuzzy neural network (T2FNN) and its learning method using Grey wolf optimizer (GWO) for system identification was proposed. The structure of T2FNN is a combination between a type-2 fuzzy logic system with human-like IF-THEN rule thinking properties and neural networks (NN) with learning and optimization capability. To validate in the best way their approach, the authors made a comparison with Particle swarm optimization (PSO) and Genetic Algorithms (GA). Also, in [16] an optimal tuning of fuzzy parameters for structural motion control is presented. In this case, the main aim of the authors was to optimize the fuzzy logic controller (FLC) using multiverse optimizer (MVO). The performance of the MVO system is compared with the various classical and advanced optimization algorithms. On other hand, Qian et al. [17] proposed a fuzzy controller for transport control of double pendulum type systems and used GA for tuning of the FLC parameters. Marinaki et al. [18] developed a new method inspired on PSO, with a different velocity equation, for the calculation of the parameters in active control systems with a FLC.
In [19], a novel nature-inspired population-based discrete optimization technique, namely binary bat algorithm (BBA), is proposed for the first time to solve load frequency control (LFC) problem in power system. In another work Caraveo et al. [20], presented a modification of a bio-inspired algorithm based on the bee behavior for optimizing fuzzy controllers. The experimental results were compared with the traditional bee colony optimization in the optimal design of fuzzy controllers.
In [21] a new methodology for FLC parameter optimization using Cuckoo search was presented, includ-ing the rule base as another degree of freedom, in such a way that a better solution for the problem to be optimized is more feasible to achieve. In [22] the authors used the search group algorithm (SGA) and introduced an adaptive parameter control using fuzzy logic, namely fuzzy SGA (FSGA), for enhancing the solution quality of the basic SGA. In the proposed method a fuzzy system was used to dynamically adjust the control parameter value with respect to normalized iteration and normalized error value, which are the inputs of the system.
In [23], a new variant of the algorithm proposed in [22] using Type-2 fuzzy logic for the dynamic adjustment of parameters used to optimize the trajectory of a mobile robot was proposed. The main goal in this work was that the robot can follow a given reference path with a minimum error.
Also, in [24] a work for finding the optimal path planning of mobile robot in unknown static and dynamic environments using Fuzzy-Wind Driven Optimization algorithm singleton type-1 fuzzy logic system (T1-SFLS) controller and Fuzzy-WDO hybrid was presented. The WDO (Wind Driven Optimization) algorithm is used to optimize and tune the input/output membership function parameters of the fuzzy controller.
In [25], a migrant-inspired path planning algorithm for the obstacle avoidance was developed, where the design of an FLC to adjust the dominant ratio of the PSO algorithm and the PFN method for improving the convergence speed; the experimental results were compared with other methods.
In [26], the lightning search algorithm (LSA) was developed to enhance the performance of the trial-and error procedure in obtaining the MFs used in the conventional FLC. LSA is a novel controller for the three-phase PV inverter. The proposed approach aims to solve the problem of nature-inspired technique formulated to solve both single-modal and multi-modal optimization trial-and-error procedure in obtaining MFs used in the conventional FLC.
Also, many authors have been studying several optimization methods to solve different problems; for example, in [27], the authors present an overview on recent developments in machine learning, data mining and evolving soft computing techniques for fault diagnosis and on nature-inspired optimal control. The generic theory was discussed along with illustrative industrial process applications that include a real liquid level control application, wind turbines and a nonlinear servo system. In [28] an attempt to propose an intelligent control system which takes the form of a fractional order fuzzy proportional–integral–derivative (FOFPID) controller was investigated as a solution to deal with the complex dynamic nature of the distillation column. In [29] the authors suggests a synergy of fuzzy logic and nature-inspired optimization in terms of the nature- inspired optimal tuning of the input membership functions of a class of Takagi- Sugeno-Kang (TSK) fuzzy models dedicated to Antilock Braking Systems. Also, in [30] two new strategies for navigation of a swarm of robots for target/mission focused applications including landmine detection and firefighting was presented. The first method presents an embedded fuzzy logic approach in the PSO algorithm and the second method presents a swarm of fuzzy logic controllers, one on each robot. The framework of both strategies were inspired by natural swarms, such as the school of fish or the flock of birds. In this Section, we observed some works where the researchers have been using optimization methods to improve the experimental results on the controllers using type-1 and type-2 fuzzy logic or optimization methods can be used without fuzzy rules. However, is necessary to identify when is better to use type-1 fuzzy logic than type-2 fuzzy logic. Finally, in [31] was introduced a new hybrid approach that combines ant system optimization and fuzzy logic concept to facilitate the multi-objective HPSP optimization, such as the maks-pean, and the processors workload. Based on the concept of the ant system and fuzzy controller, we automatically control the ant system parameters evolution for the multi-objective Heterogeneous processors system using ant system and fuzzy logic controller optimization. Therefore, we have made a review with recent works using both types of fuzzy logic. Finally, in [32] the parameter adaptation was focused on managing the weights of neural networks using type-2 fuzzy inference systems optimized with bio-inspired methods. This is important due to the fact that the weights affect the performance of the learning process of the neural network [33, 34] and the use of type-2 fuzzy weights can be important in the training phase for managing uncertainty in real world data.
A review with Type-1 and Type-2 fuzzy logic using optimization methods
In this section, we are presenting a survey of recent works using type-1 and type-2 fuzzy logic using optimization methods to improve the experimental results. In the literature review, we presented some works in a general form using optimization methods, where some papers use, type-1 and type-2 fuzzy logic with optimization algorithms and other works only used optimization without fuzzy logic. Based on the search in web of science “fuzzy logic controller nature inspired optimization”, we found 15 works mentioning the above keywords. In Fig. 3, we can observe that India has 3 works, while other countries only have 2 and 1 paper related with this topic.
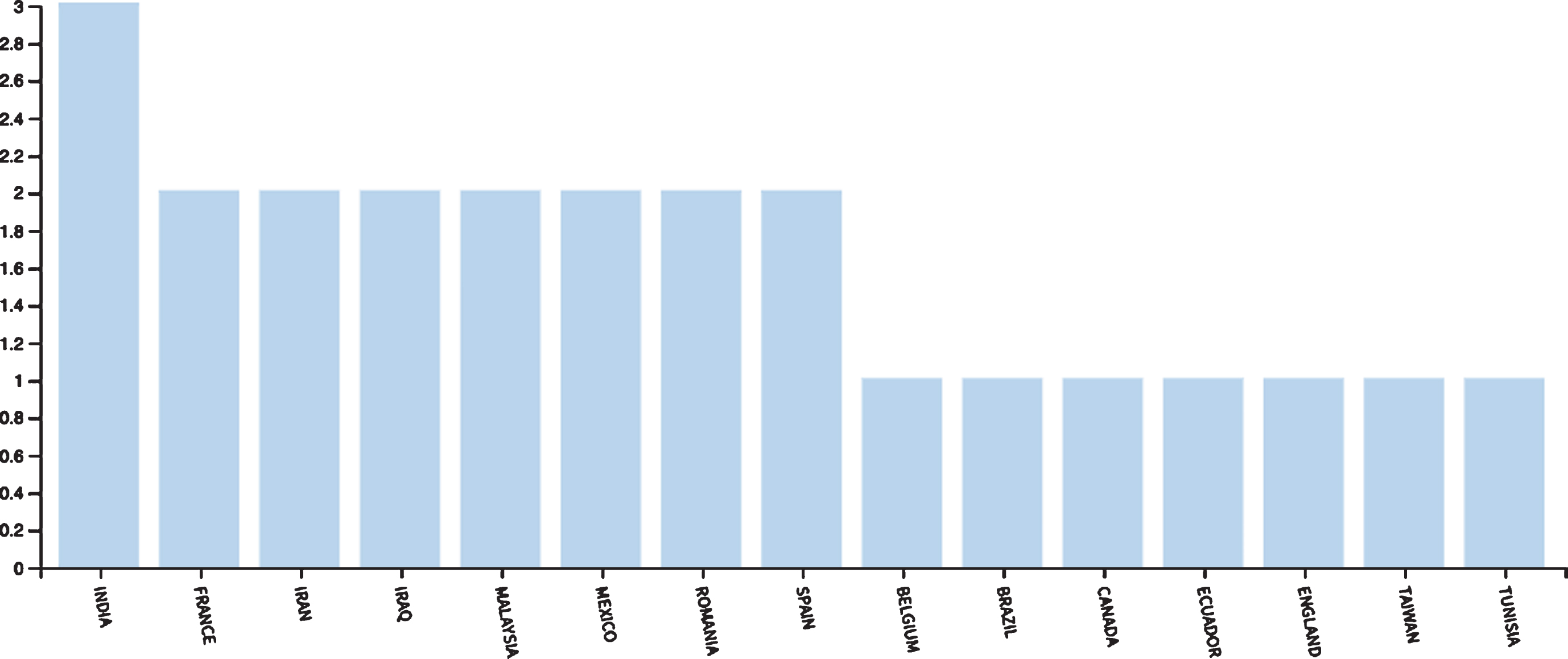
TOPIC in web of science: (fuzzy logic controller nature inspired optimization).
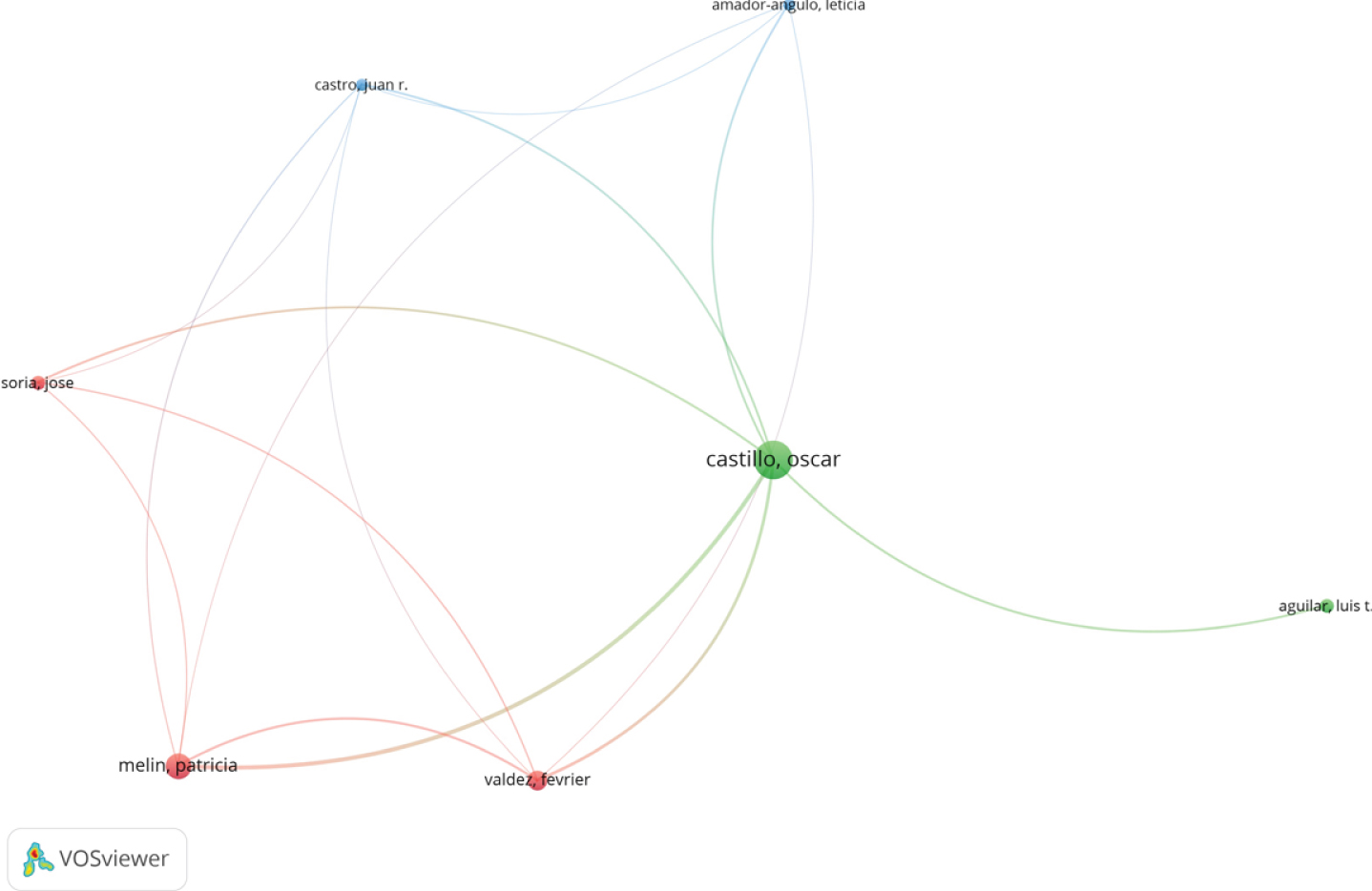
The network of researchers according to this search is presented in Fig. 4.

Network of researchers in the world working with the topic ‘fuzzy logic controller nature inspired optimization’.
On other hand, if the search is “type 2 fuzzy logic controller optimization” on web of science. We found, 199 works, where Mexico has the first place in this topic with 49 (24.623 %) of 199 papers. However, we present only the first 20 references [45, 57–75] according to web of science (see Fig. 6). The rest of papers can be reviewed with the above search. The network of researchers for Mexican papers is presented in Fig. 5.
Network of researchers in Mexico working with the topic ‘type 2 fuzzy logic controller optimization’.
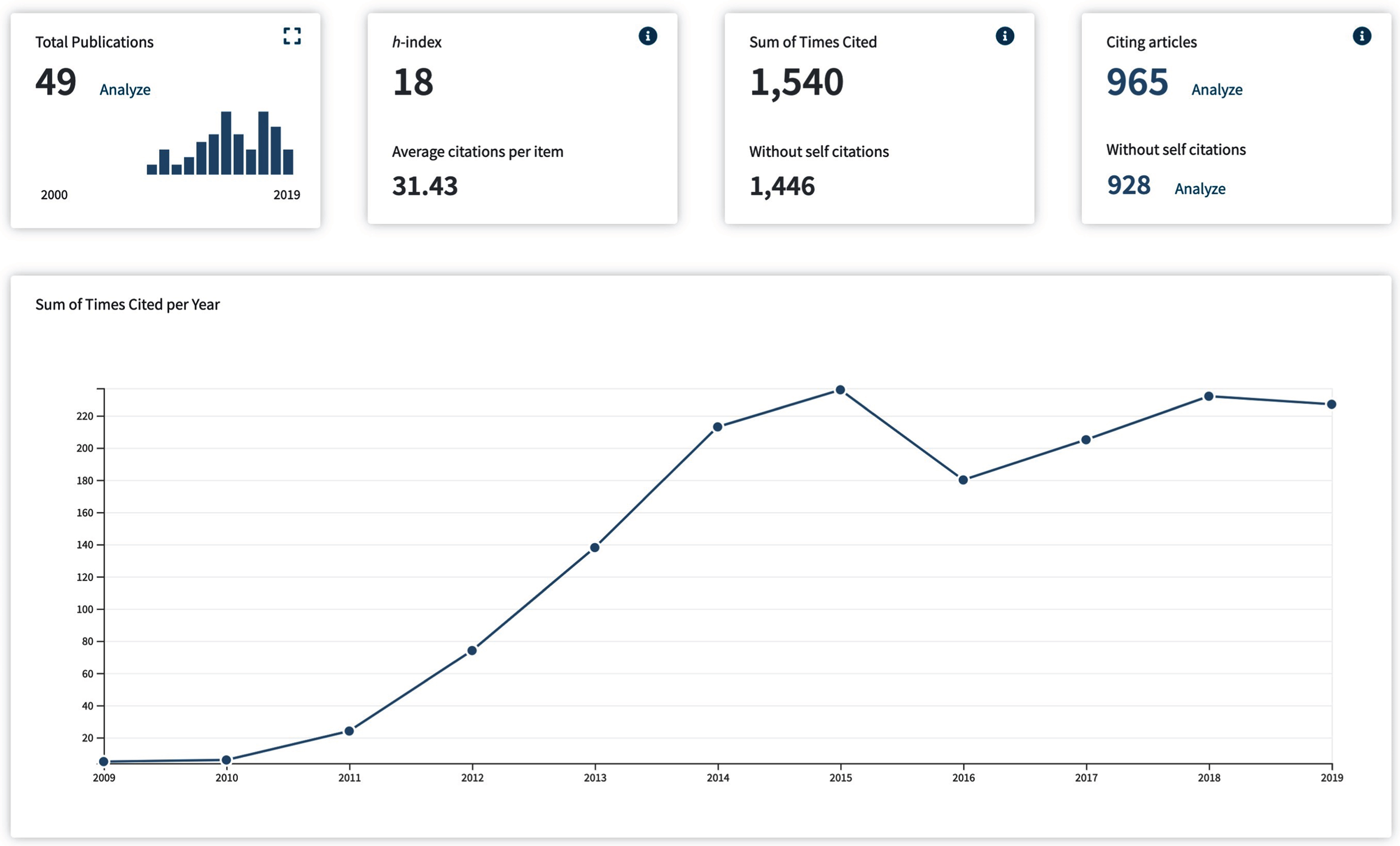
Citation report for 49 results from Web of Science Core Collection.
The second place is taken by Peoples R China with 16.583 % and Iran with 15.075 %. The rest of countries have less than 10% with the analyzed search. In Fig. 7, is presented a graphic by countries with this topic.
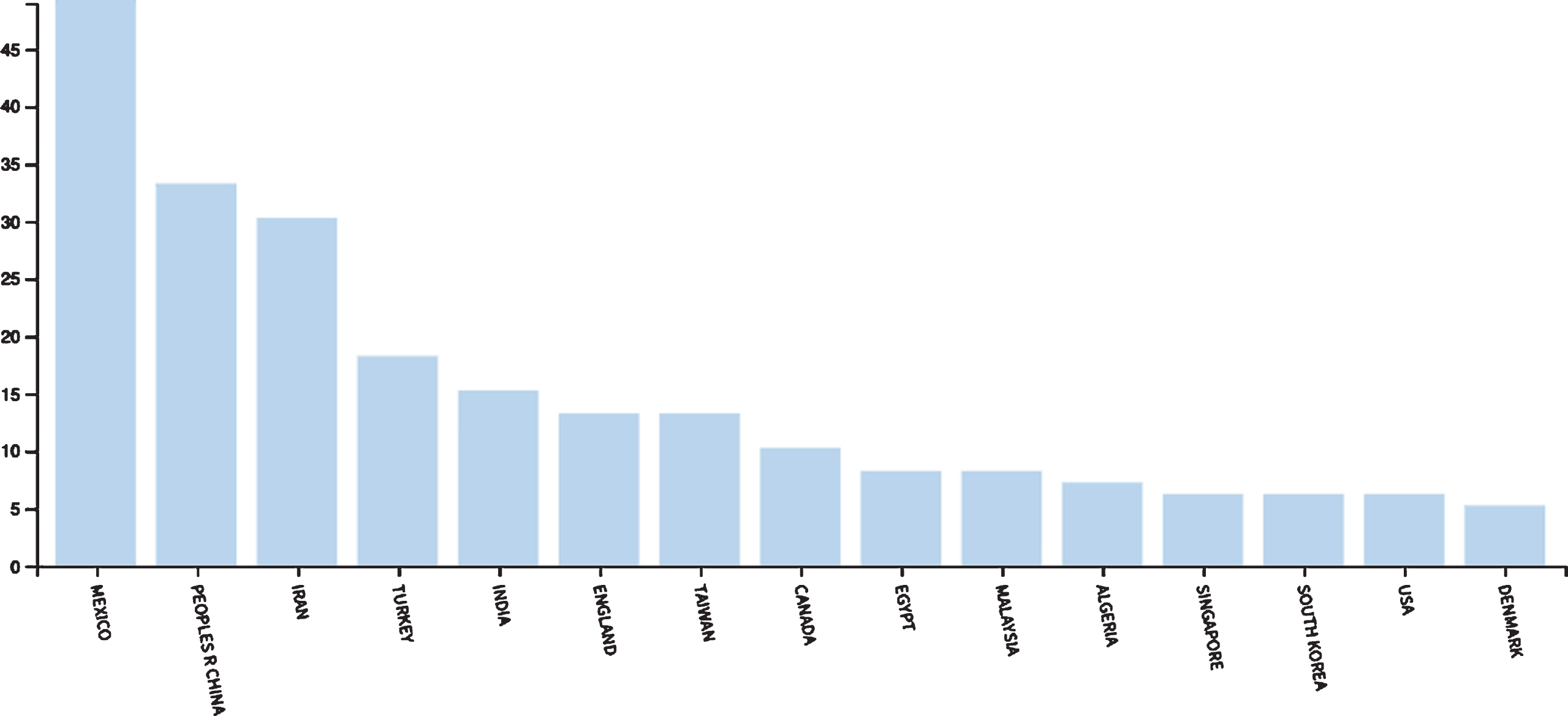
TOPIC in web of science (type 2 fuzzy logic controller optimization).
Also, we performed a search in web of science with the topic “fuzzy logic controller optimization”, and were 1471 papers found in total to observe the difference with the topic “type-2 fuzzy logic controller optimization”. In Fig. 9 is presented a plot, where India is leading with 215 papers (14.548 %) of 1471. However, we present only the first 15 references according to web of science [76–94] (view Fig. 8), followed by Peoples R China with 12.101 % and Iran with 11.081 %. USA, Mexico and other countries have less than 10% of papers.
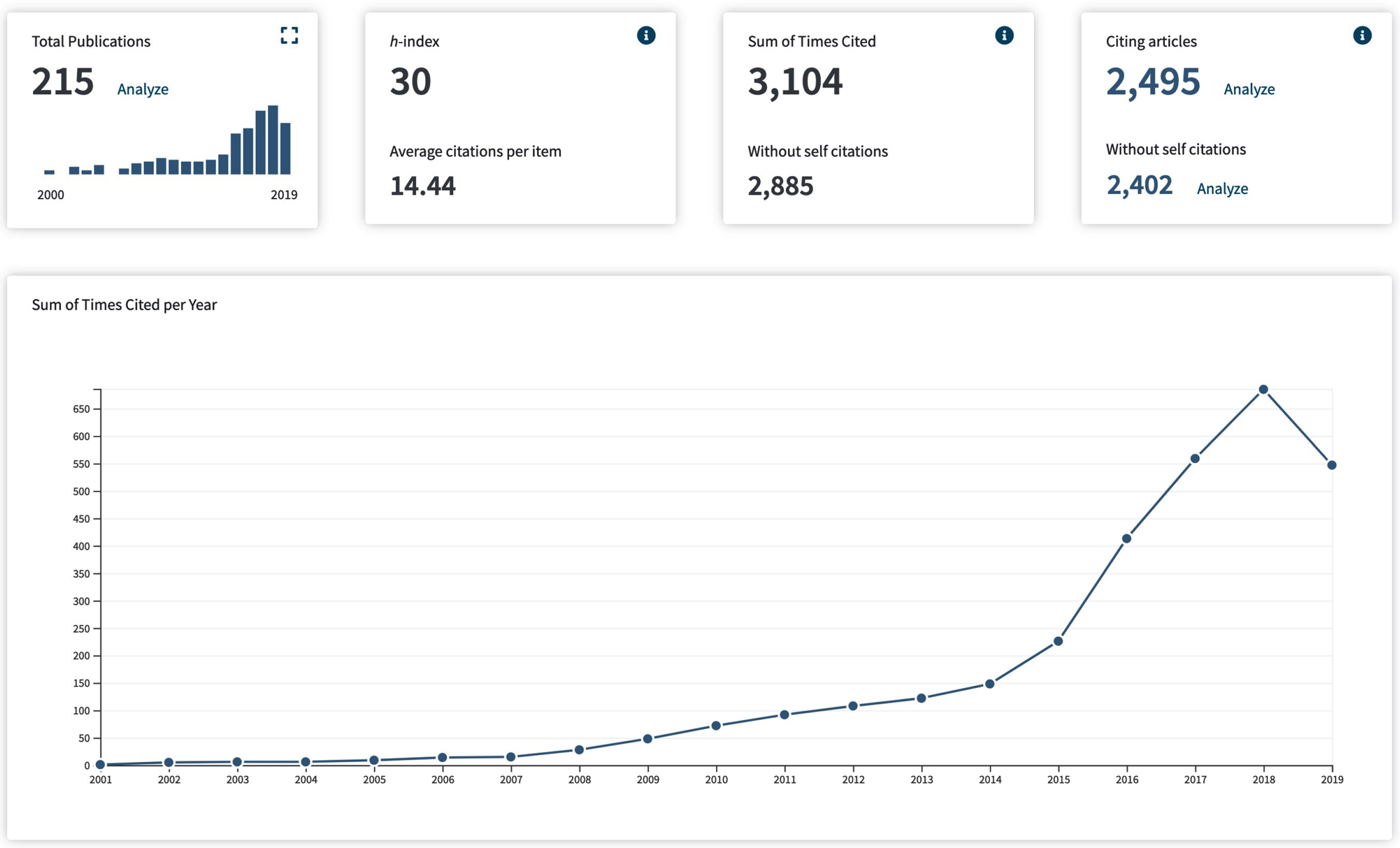
Citation report for 215 results from Web of Science Core Collection.
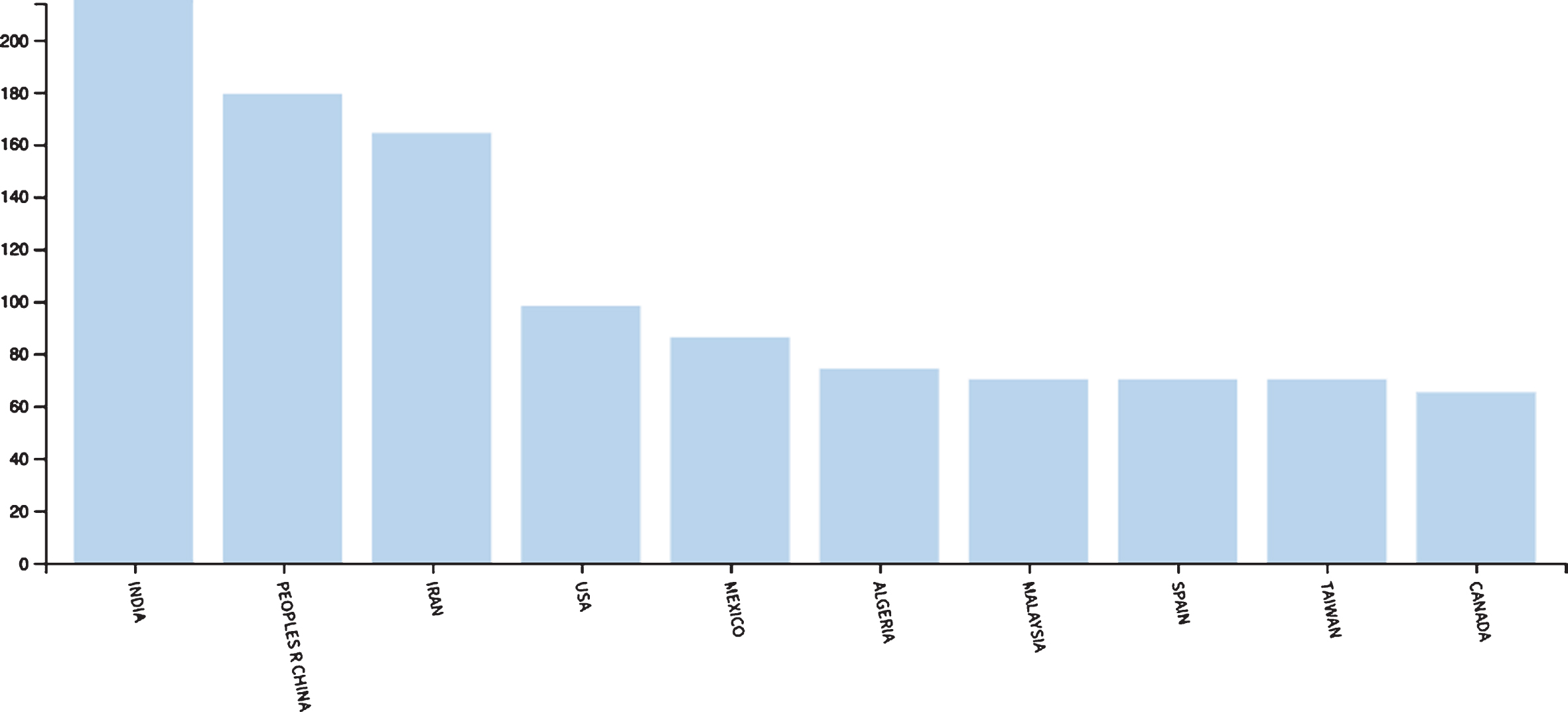
TOPIC web of science (fuzzy logic controller optimization).
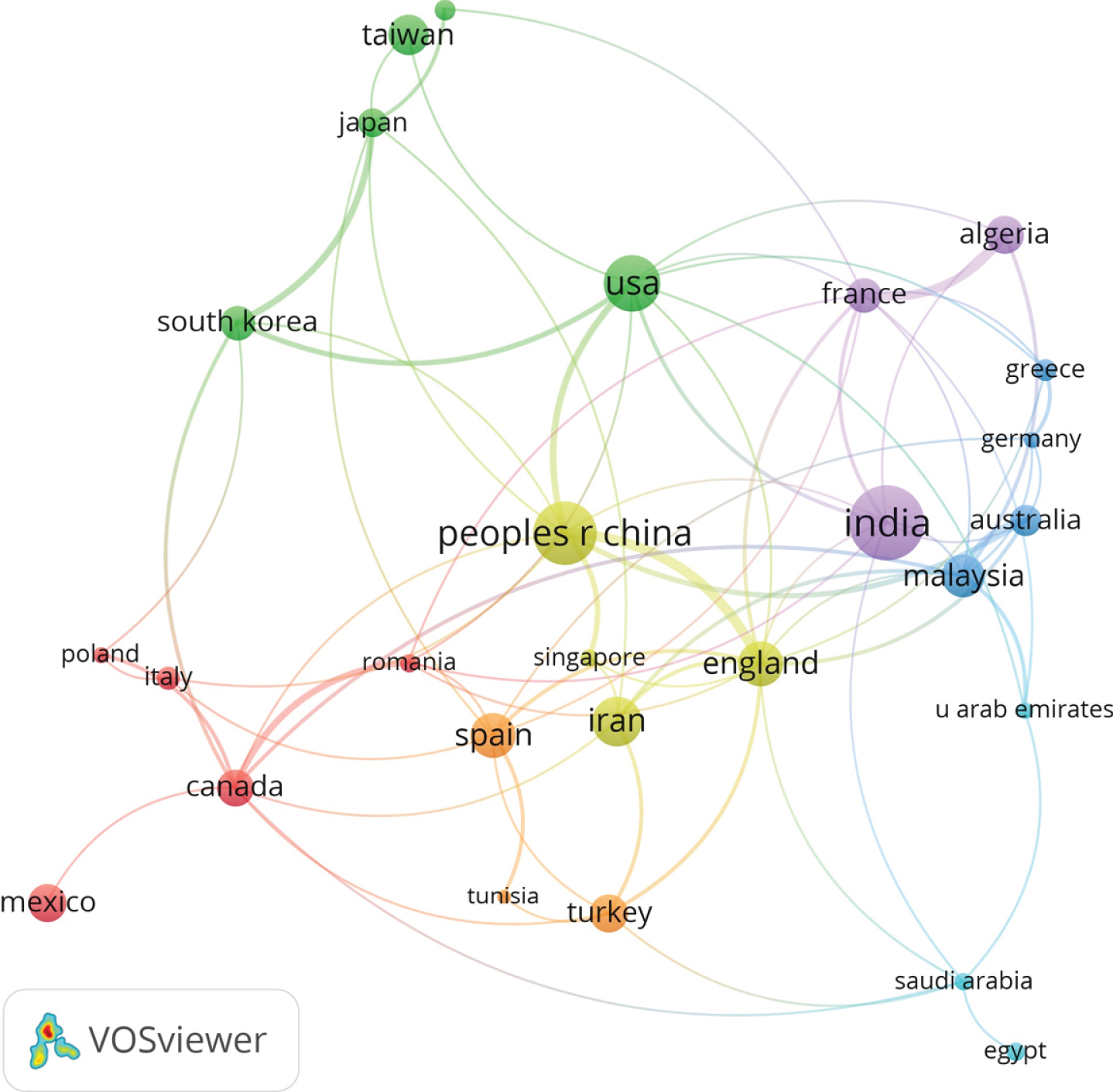
The complete network considering all countries with the topic “type-2 fuzzy logic controller optimization” is shown in Fig. 10.
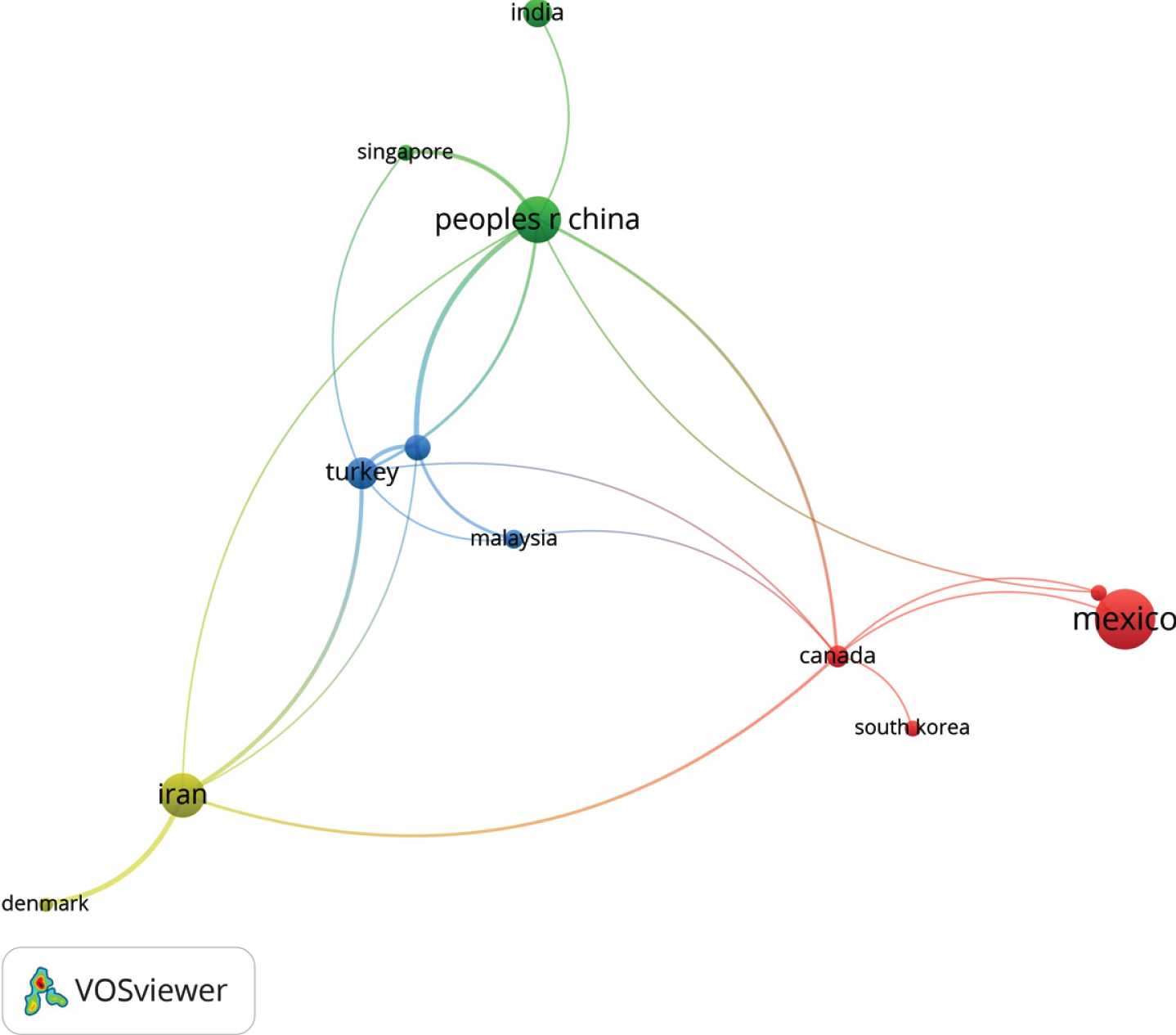
Network working with the topic ‘type 2 fuzzy logic controller optimization’.
Figure 11 shows the complete network with the topic ‘fuzzy logic controller optimization’.
Network working with the topic ‘fuzzy logic controller optimization’.
After finishing the review we can notice that many works using nature inspired optimization methods on type-1 or type-2 fuzzy logic controller design have been proposed. We can conclude the importance of the optimization methods to achieve the best results in real problems. Nowadays, control systems are very complex, and tuning of several parameters is needed, and is difficult to the users are test and error every time run the system. Therefore, the use of optimization methods based on nature is a good alternative to improve the results with a low computational cost as can be seen in this review. Also, with this survey we can observe that the use of type-1 and type-2 fuzzy systems is becoming more popular, the authors are using fuzzy rules to improve the results combining optimization methods based on nature. With the results obtained from web of science, we have observed how the trend is to use optimization methods every day because the researchers have been achieving good results applying bio-inspired methods. Also, nowadays we can find in the literature hybrid methods to improve the results. Also, as a future work we can explore more optimization methods using other type of parameter adaptation or can be included in the survey hybrid methods with parameter adaptation using fuzzy logic to compare the performance among the methods. Other advantage of making this type of reviews is the motivation for the authors to use techniques to change dynamically the parameters achieving the best results with the optimization methods.
Footnotes
Acknowledgments
The authors would like to thank CONACYT and Tecnológico Nacional de Mexico/Tijuana Institute of Technology for the support during this research work.