
Abstract
Robotic manipulators represent a class of nonlinear and multiple-degrees-of-freedom robots that have pronounced coupling effects and can be used in various applications. The challenge of understanding complexity in a system’s dynamic behavior, coupling effects, and sources of uncertainty presents substantial challenges regarding fault estimation, detection, identification, and tolerant-control (FEDIT) in a robot manipulator. Thus, a proposed active fault-tolerant control algorithm, based on an adaptive modern sliding mode observer, is represented. Due to the effect of the system’s complexities and uncertainties for fault estimation, detection, and identification (FEDI), a sliding mode observer (SMO) is proposed. To address the sliding mode observer drawbacks for FEDI such as high-frequency oscillation (chattering) and fault estimation accuracy, the modern (T-S fuzzy higher order) technique is represented. In addition, the adaptive technique is applied to the modern sliding mode observer (MSMO) to self-tune the coefficients of the fault estimation observer to increase the reliability and robustness of decision-making for diagnosis of the fault. Next, the residual delivered by the adaptive MSMO (AMSMO) is split into windows, and each window is characterized by a numerical parameter. Finally, the machine learning technique known as a decision tree adaptively derives the threshold values that are used for problems of fault detection and fault identification in this work. Due to control of the effective fault, a surface automated new sliding mode controller (SANSMC) is presented in this work. To address the challenge of chattering and unlimited uncertainties (faults), the AMSMO is applied to the sliding mode controller (SMC). In addition, the surface-automated technique is used to fine-tune the surface coefficient to reduce the chattering and faults in the robot manipulator. The results show that the machine learning-based automated robust hybrid observer significantly improves the robustness, reliability, and accuracy of FEDIT in unknown conditions.
Keywords
Introduction
Robot manipulators have been extensively used in several manufacturing fields, including medical science as a surgical robot, the military, and automotive industry applications, to improve their efficiency and accuracy [1]. Because of the system’s dynamic complexities, nonlinearities, and coupling effects, FEDIT in robot manipulators is a challenging research task to achieve. However, numerous types of failures have been introduced in robot manipulators. These failures are divided into three main groups: the plant fault, actuator fault, and sensor fault [2]. To monitor the condition of the robot manipulator, different techniques, such as robot torque and position signature analysis (RTPSA), vibration analysis (VA), and acoustic emission (AE) measurements, have been introduced in the literature [2, 3]. This research exploits RTPSA because these signals are suitable for FEDIT in the robot manipulator.
In recent years, various research papers have been published in the field of FEDIT in robot manipulators, which are generally divided into model-based (MB), signal-based (SB), knowledge-based (KB), and hybrid-based (HB) groups [2–4]. These techniques have various advantages and disadvantages in FEDIT of the robot manipulator. Different types of hybrid algorithms for FEDIT have been recommended in the literature [5–7]. In this research paper, the hybrid-based FEDIT technique is recommended. Thus, a robust model-based technique for FEDI is introduced. To improve the fault estimation accuracy and increase the FEDI performance, the knowledge-based procedure is applied to the MB technique for the design of a robust hybrid approach. To perform fault detection and identification, a machine learning-based (decision tree) approach is recommended. To reduce the effect of the fault, an adaptive fuzzy modern sliding mode algorithm is recommended.
The observation-based technique is one of the main techniques for designing the model-reference FEDIT algorithm. Linear-based and nonlinear-based observation methods are two of the primary model-based techniques for FEDIT. The linear-based observation technique has been used in various industrial applications for FEDI. However, this technique suffers from a low accuracy for fault estimation and poor robustness in unknown conditions [5, 9]. The nonlinear-based observer (e.g., the feedback linearization observer (FLO) or sliding mode observer (SMO)) can be used to solve the challenges encountered by the linear-based observer for FEDI in the robot manipulator. The FLO has been specifically introduced to solve the challenge of fault estimation accuracy in nonlinear systems [4, 10]. This technique still suffers from robustness in unknown conditions. To improve the robustness, the extended FLO [4, 10] and SMO [3, 11] have been presented by researchers. One of the important robust observers for FEDI of a nonlinear system is the SMO. To minimize the error of the fault estimation accuracy in the SMO, a nonlinear switching function is introduced. Though the SMO reduces the errors in the fault estimation accuracy according to a nonlinear function, the chattering phenomenon is the main drawback of this function [3]. To reduce the chattering in unknown conditions, a higher-order SMO (HSMO) is presented and reported in [3, 11]. Various techniques have been used to improve the performance of the HSMO, such as the quasi-continuous HSMO (QHSMO) [12], suboptimal HSMO (SHSMO) [13], and the twisting HSMO (THSMO) [14]. The main challenges encountered by the QHSMO, SHSMO, and THSMO relate to the first-order derivative of the sliding surface. In this research, the super twisting HSMO (STHSMO) is used for FEDI in the robot manipulator. Despite the good stability, robustness, and chattering attenuation in the STHSMO, this method suffers from subpar fault estimation accuracy. To address this issue, the Takagi–Sugeno (T–S) fuzzy model is used to design the modern SMO (MSMO) for FEDI of the robot manipulator. The fuzzy logic technique is a suitable algorithm to increase the accuracy of the MSMO, but its reliability and necessary predefinition of the fuzzy gain updating factor are its main drawbacks. To address the above issues, the adaptive MSMO (AMSMO) is adopted for FEDI in the robot manipulator.
Various techniques have been used to perform fault detection and identification (i.e., the decision-making process) in nonlinear systems, which are divided into two main groups: a) classical approaches and b) machine learning-based approaches. Classical approaches for decision-making such as rule-based systems are representative examples of fault identification that were widely used for decades in different expert systems [15, 16]. However, machine learning (ML)-based decision-making is currently more frequently used for condition monitoring in nonlinear systems due to the increased computational capabilities of modern computer systems. The most popular ML-based solutions employed to resolve the problems of decision-making in the field of condition monitoring are support vector machines (SVM) [17], artificial neural networks (ANN) [18], and k-nearest neighbors (k-NN) [19]. During training, the SVM attempts to find the hyperplane with the largest margin that separates the features corresponding to data samples of different classes. Decision-making is accomplished by determining on which side of the hyperplane the new instance appears. Despite the fact that the SVM is known as a state-of-the-art technique in the field of ML, this algorithm appears to be sensitive to the scales of the attributes used for training. Further, it faces the challenge in hyperparameter selection to find a tradeoff between the size of the hyperplane’s margin and the number of allowed misclassifications. When applying ANNs to decision-making, the network should be trained by the back-propagation algorithm using the training feature set to find the optimal weights of the network’s nodes, which allows it to accurately resolve the problems of binary or multi-class classification (i.e., diagnosing different types of faulty conditions). The ANN is a good approach that is capable of solving very complex problems; however, it requires a lot of data for training in general and the time required to train the network increases significantly with the increase of the problem’s complexity (due to the increasing numbers of hidden layers and neurons in these layers). Additionally, to achieve good performance when using an ANN, the type of regularization and its parameters should be chosen precisely to avoid the problems of overfitting or underfitting. Regarding k-NN, this method is also known as a ‘lazy’ classification algorithm: during the training, this algorithm does not learn any pattern or mathematical function which can help it to perform the fault diagnosis task. The decision-making in k-NN is done by simply computing the distance function between the new data instance and the ones of training data. The main disadvantages of the k-NN model are the curse of dimensionality (the performance of the algorithm drops with a significant increase in the number of features), and the need to find an appropriate number of neighbors. Further, the choice of the distance function used by the algorithm is closely related to the nature of the data (e.g., is the data linear or nonlinear). Thus, to avoid the aforementioned issues, in this paper we employ the decision tree [20] classifier for the task of decision-making. Decision trees can be efficiently applied to resolve both the problems of classification [21] and regression [22]. Moreover, this algorithm is known to not be sensitive to the scales of the training data attributes (features), is easy to visualize, and relatively fast to train. After training, the decision tree approach delivers a set of rules expressed using logic operators (i.e., ‘IF’, ‘AND’, ‘OR’) that are easy to interpret and can be used for determining the condition of the robot manipulator.
Several techniques have been introduced for fault-tolerant control (FTC). These FTC approaches are divided into two categories: a) active fault-tolerant control (AFTC) and b) passive fault-tolerant control (PFTC) [3]. In the AFTC techniques, the fault is detected and identified in the first step, then the effect of the fault can be reduced in the next step. In the PFTC, the effect of the fault can be directly reduced based on the robust control algorithm [2–4]. In this research, AFTC is adopted to reduce the effect of the fault in the robot manipulator. Various methods have been introduced to design AFTC or PFTC and can be categorized into two main groups: a) linear-based FTC (LFTC) and b) nonlinear-based FTC (NFTC) [2–4]. Linear techniques face challenges regarding coupling effects parameters, noisy conditions, and increasing the gear [2]. To address the issues of the LFTC models, nonlinear model-based techniques (MBFTC) [3], nonlinear knowledge-based techniques (KBFTC) [23], and nonlinear hybrid-based algorithms (HBFTC) [2–4, 23] have been used for robot manipulators. The MBFTC’s have various advantages, such as stability, robustness, and reliability, but working in uncertain conditions is the main issue for these techniques. To address this substantial issue, an effective HBFTC model has been reported in [23]. SMC is a robust and reliable MBFTC technique for FTC and is one of the best candidates for FTC of the robot manipulator. However, the conventional SMC has three important issues: a) the system’s model dependency, b) chattering phenomenon, and c) high robustness [3]. To address the first issue of the system’s model dependency, the new proportional-integral-derivative (PID) fuzzy technique is used in this research. This technique has three inputs: the error, change of error, and the integral of the error. Because of the number of inputs, the number of fuzzy rule bases is increased. To optimize the number of rule bases in the PID fuzzy technique, the new proportional-derivative (PD) plus proportional-integral (PI) fuzzy technique is recommended for the design of the new fuzzy SMC (FSMC). In addition, to increase the fault and chattering attenuations, the T-S fuzzy MSMO is used in parallel with NFSMC to design the modern FSMC (MFSMC). Furthermore, to improve the robustness and chattering reduction of the MFSMC the online tuning (OT) approach can be used.
Figure 1 illustrates the block diagram of the machine learning-based automated robust hybrid observer for FEDIT of the robot manipulator. The block diagram of this algorithm has four main parts: a) mathematical system modeling based on the Lagrange mathematical technique [1, 24], b) advance observation based system estimation based on T-S fuzzy MSMO, c) the machine learning-based (decision tree) algorithm for fault detection and classification (identification), and d) the design of a fault-tolerant control algorithm based on the OTMFSMC algorithm. The adaptive T-S fuzzy MSMO has four main sub-blocks: i) in the first step, the SMO for the robot manipulator is designed, ii) to reduce the chattering, the STHSMO is designed for the robot manipulator, iii) to increase the accuracy of fault/signal estimation, the MSMO is designed and applied to the robot manipulator, and iv) the reliability of the MSMO can be increased using the adaptive technique and the designed AMSMO to produce a robust, accurate, and reliable fault estimation algorithm. In the third step, the faults can be detected and identified for the robot manipulator based on the decision tree classification algorithm.

Machine learning-based robust hybrid observer technique for robot manipulator fault detection, estimation, identification, and tolerant control.
The decision making for fault detection and identification of the robot manipulator contains three parts performed in a sequence: i) a residual generator, which is calculated based on the difference between the output and estimated position; ii) window characterization, which is based on the division of the residual signals into equal-sized windows and extracting amplitude-dependent feature parameter to quantitively characterize these obtained windows; and iii) deriving the logical decision rules for fault detection and identification using decision trees. The fault detection and identification are accomplished by the logical decision rules delivered by the decision tree machine learning technique. Specifically, the decision about the fault condition is accomplished by comparing the value of the extracted feature parameter from the window of the residual signal, with the learned threshold provided by the decision tree classification algorithm.
The FTC unit has the following sub-blocks: i) A robust controller for FTC based on SMC. ii) To reduce the system modeling dependency in SMC, the NFSMC is designed and implemented in the robot manipulator. iii) To increase the fault and chattering attenuation, the adaptive T-S fuzzy SMO (AMSMO) is used in parallel with NFSMC and the designed MFSMC. iv) to improve the robustness and chattering reduction of the MFSMC the online tuning (OT) approach can be used.
The rest of this research paper is organized as follows. In Section 2, the dynamic formulation of the Programmable Universal Machine for Assembly (PUMA) robot manipulator is briefly represented. The proposed approach for FEDIT for the robot manipulator is presented in Section 3. This section includes three main parts. In the first step of the methodology, the fault/signal can be estimated accurately based on the AMSMO technique. In the second step, the faults can be detected and identified based on the machine learning approach. In this technique, the decision tree algorithm is introduced to increase the accuracy of fault detection and identification. In addition, to design the AFTC algorithm, the OTMFSMC technique is proposed. In Section 4, the results are presented and discussions related to FEDIT are analyzed. Finally, the conclusions are provided in the last section.
Usually, the robot manipulator is a multi-degree of freedom (DOF) system. The dynamics of this system are extremely nonlinear, with inherent coupling effects. The foremost challenge in the control and diagnosis of the faults of the robot manipulator is uncertainty. Thus, FEDIT of the robot manipulator is the main goal in this research. To perform FEDI of the robot manipulator, the AMSMO technique is recommended in this research. This technique is designed based on the following steps. In the first step, SMO is designed. To reduce the chattering, the SMO is developed using the STHSMO technique. To increase the accuracy of fault/signal estimation, the STHSMO is improved using an MSMO and applied to the robot manipulator for fault estimation. The reliability of the MSMO can be increased by the adaptive technique, thus this issue is solved using the AMSMO to improve the robustness, accuracy, and reliability for fault estimation. To design the SMO, system modeling is the most important part. To model the robot manipulator, the Lagrange formulation and system identification techniques have been commonly used by researchers. In this research, the PUMA robot manipulator is modeled by the Lagrange formulation. The corresponding Lagrange formulation, consisting of uncertainties, the faults, and torque, is represented by the following equation:
The output position of the robot manipulator is represented by the following equation:
If X1 = q and
Based on Fig. 1, after mathematical (Lagrange) modeling of the six DOF robot manipulator, in the first step, an adaptive modern sliding mode observer (AMSMO) is designed for fault estimation of the PUMA robot manipulator in the presence of uncertainties and external disturbances. In the second step, the machine learning technique based on decision trees is used for accurate fault detection and classification (identification) for the robot manipulator. In addition, the online tuning modern fuzzy sliding mode controller (OTMFSMC) is designed for fault-tolerant control of the PUMA robot manipulator, which is represented in the last step.
Adaptive modern sliding mode observer
Regarding Fig. 1, the AMSMO for highly accurate fault estimation of the robot manipulator has four main steps: a) design the SMO for fault estimation in the PUMA robot manipulator, b) to reduce the chattering and increase the performance of fault estimation, the STHSMO is designed for the PUMA robot manipulator, c) to increase the accuracy of fault/signal estimation, the T-S fuzzy technique is applied to the STHSMO to design the MSMO for the PUMA robot manipulator, and d) to increase the fault estimation reliability, and accuracy in the PUMA robot manipulator, the adaptive technique is applied to the MSMO to design the AMSMO. The fault estimation signal and output state observation signal based on the SMO are denoted as the following equations, respectively [11]:
To address the chattering issue, the following function is defined:
Here,
Within Equations (10) and (11)
Though the earlier steps improve the robustness and attenuate the chattering based on the STHSMO for fault estimation, this technique has challenges in accurately estimating faults. To address the fault estimation accuracy in the steady-state condition, the PI T-S fuzzy algorithm is recommended [25].
Here,
Here,
Here,
The fuzzy rule table for online tuning of the fault estimation coefficients in the AMSMO
Therefore, the output signal estimation and the fault estimation based on the adaptive MSMO (AMSMO) are represented as the following equations, respectively:
This means that the measured output estimation error converges to zero. After estimating the output signal based on the AMSMO, the residual signal can be calculated as follows:

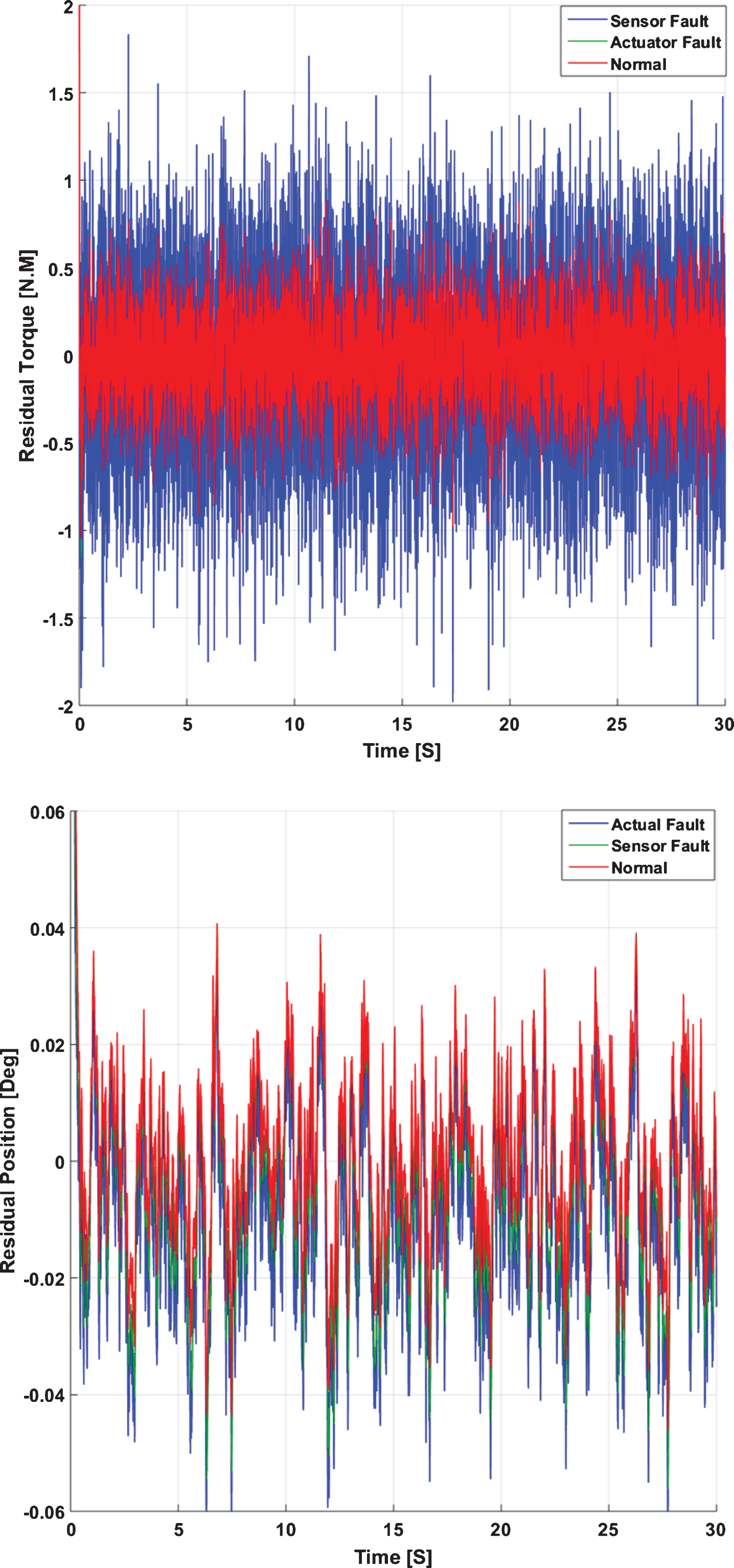
Residual signal for the actuator fault, sensor fault, and normal condition based on the SMO.
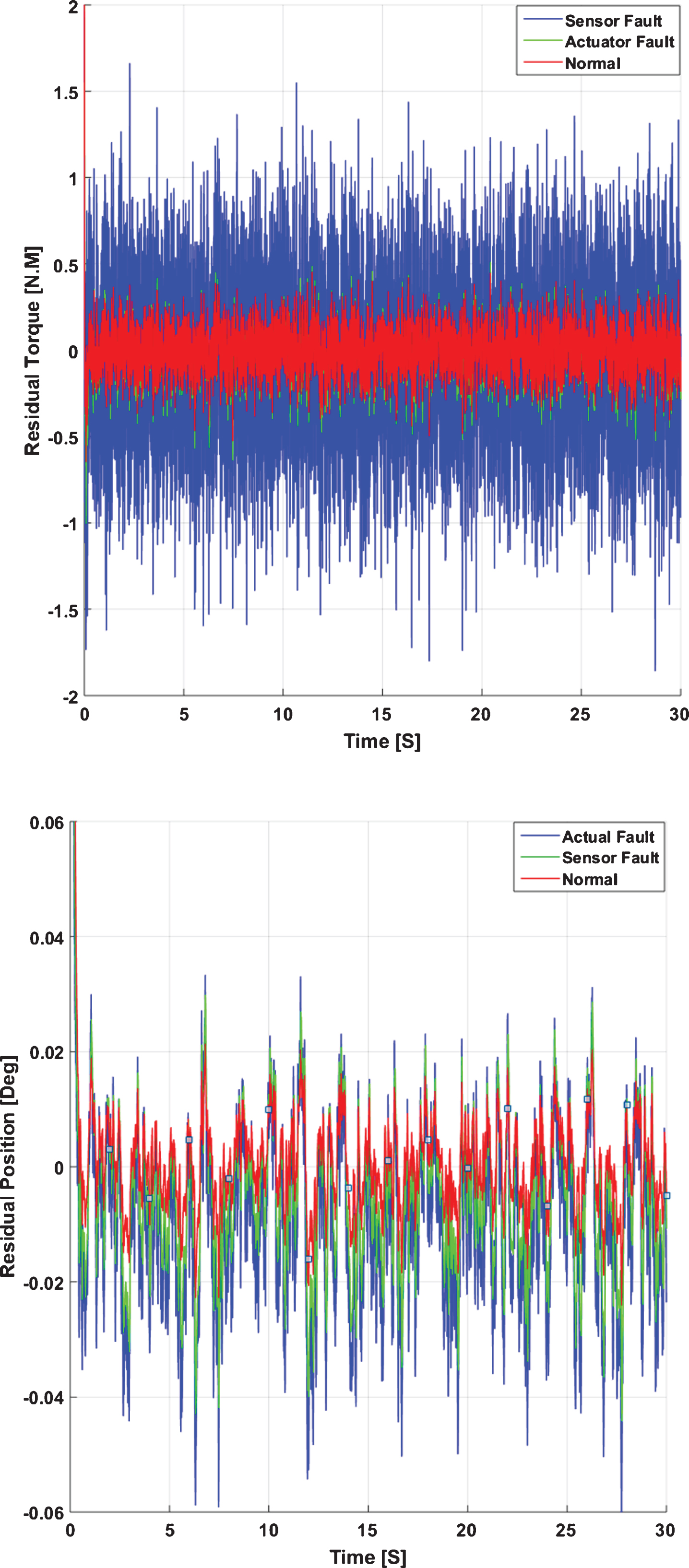
Residual signal for the actuator fault, sensor fault, and normal condition based on the MSMO.

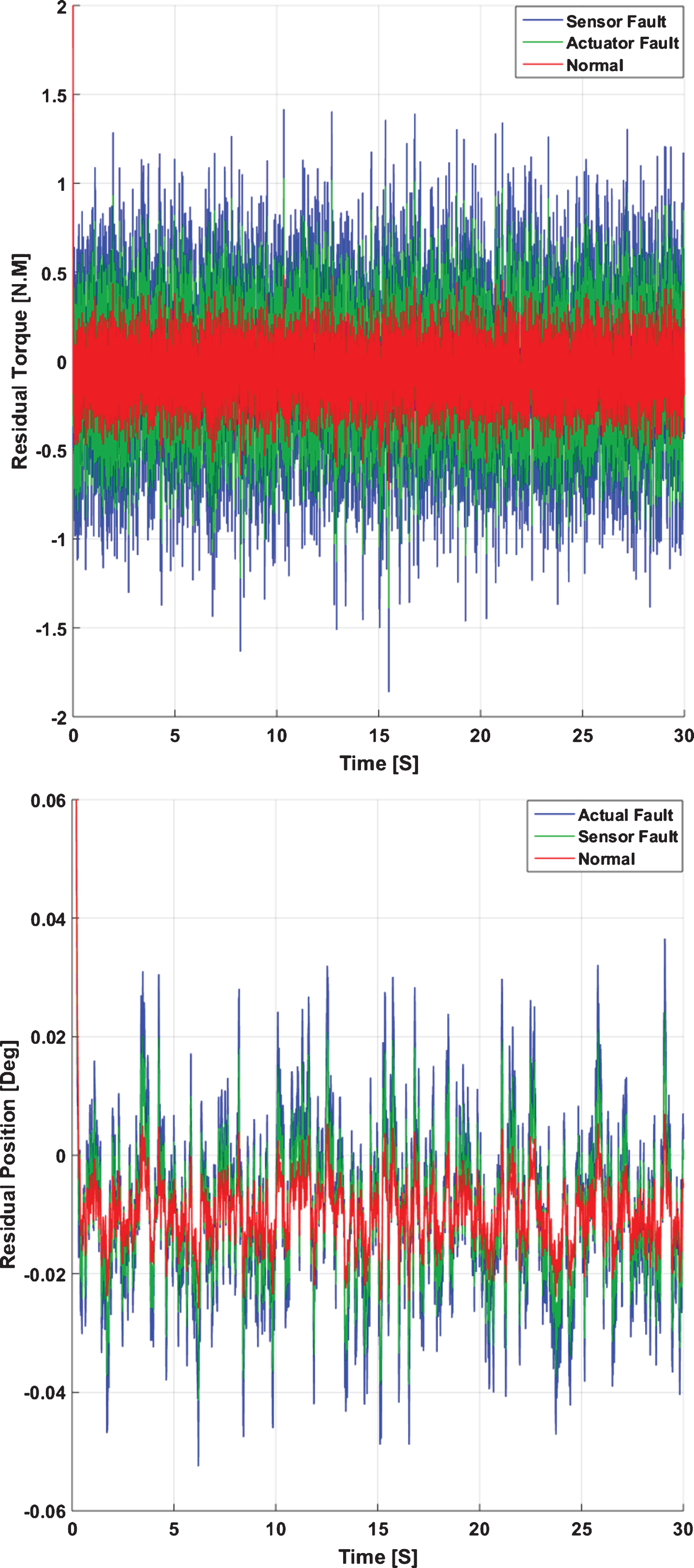
Residual signal for the actuator fault, sensor fault, and normal condition based on the AMSMO.
Based on these figures, the difference between various states of signals in the AMSMO is more clear than the MSMO and SMO. According to Fig. 2, the SMO has numerous problems regarding signal estimation, thus, this technique is not suitable for high-accuracy signal estimation. Regarding Fig. 3, the MSMO is suitable for estimates in the normal condition, but it has a problem in estimating the actuator and sensor faults. Based on Fig. 4, the torque and position residual signals illustrate that the AMSMO is a suitable technique for highly accurate signal estimation in both normal and abnormal conditions.
In this section, the procedure of fault detection and identification performed using the decision tree machine learning technique is described for the robot manipulator. Machine learning-based decision making has two main steps: a) residual signal characterization, and b) decision tree-based fault diagnosis.
Residual Signal Characterization
Once the residual signals for each condition are obtained using Equation (21), these residues can be utilized for the fault detection and diagnosis process. To proceed further with the decision tree for fault diagnosis, the numerical attributes (i.e., feature parameters) are required. These feature parameters must be capable of reacting sensitively to the changes in the operating conditions of the manipulator and thus, to the changes in the signals. Note that the residual signals represent the error between the original signals and their estimates by the proposed observer. Hence, the parameters which are sensitive to the changes of magnitudes of the residual signals can be successfully applied to characterize these residues (i.e., the error signals). In this work, the residual signals of the torque and position are delivered by the proposed observer. To describe the changes in the amplitudes of the residual signals and derive the representative attributes that can be used for the decision-making process, the entire time-domain sequence is first split into windows of equal size. Then, the energy values of these windows corresponding to both of the residual signals are extracted to deliver a parameter that can be used to express ‘the amount of error’ in the specific window sequence. The value of the energy attribute can be computed as follows:
After the windows of residual signals delivered for the torque and position of the actuator have been described with the attributes selected in the previous subsection, these values are used as inputs for the machine learning-based decision-making procedure. In this study, we apply a decision tree-based [20, 27] method from the field of machine learning that is widely applied in industry for both regression and classification problems [21, 22]. Decision trees are recognized as white-box classification models that learn fairy intuitive and easily interpretable classification rules using the feature parameters (i.e., attributes) provided in the training dataset. Moreover, this decision-making algorithm is relatively fast to train and is not sensitive to the scales of the attributes, which can be favorable when creating the solutions suitable for varied industrial applications.
In this paper, for training the decision tree algorithm to perform fault detection and diagnosis of the robot manipulator, we utilize the heuristic criterion called the Gini Impurity (GIm) [26]. The idea for the training using this criterion is to find the best split for each of the tree’s nodes, which allows the minimization of the weighted sum of the GIm metric of child nodes (in other words: maximizing the overall information gain). For the best case, the sum of GIm scores for the child nodes is equal to zero, which means that the instances corresponding to different classes presented in the training dataset are perfectly isolated in different branches of the tree. The GIm criterion can be formulated as follows:
Here, GIm j is the Gini Impurity criterion for the jth leaf of the decision tree, m is the total number of classes (i.e., robot manipulator faults) presented in the data, and pj,k is the ratio of the instances belonging to class k among all instances in the jth leaf.
Once the training of the decision tree using the energy values extracted from the windows of residual signals is accomplished, we obtain the rules for differentiating various robot manipulator conditions. These rules comprise a set of logical conditions and threshold values that are automatically learned by the algorithm to minimize the weighted sum of the GIm metric for the leaves of the decision tree. In this paper, the number of leaves is assigned to be similar to the number of signal classes presented in the dataset and is equal to three. The decision rules derived in this paper for diagnosing faults in the robot manipulator can be formalized using the following equations:
To perform fault identification of the new data instances using the rules in (24) and (25), we should simply trace out a route from the root of the trained tree to one of the leaves while comparing the energy values extracted from the windows of residual signals with the learned thresholds for each of the leaves. Examples of the decision trees corresponding to the Equations (24) and (25) built for the proposed AMSMO approach are depicted in Figs. 5 and 6.
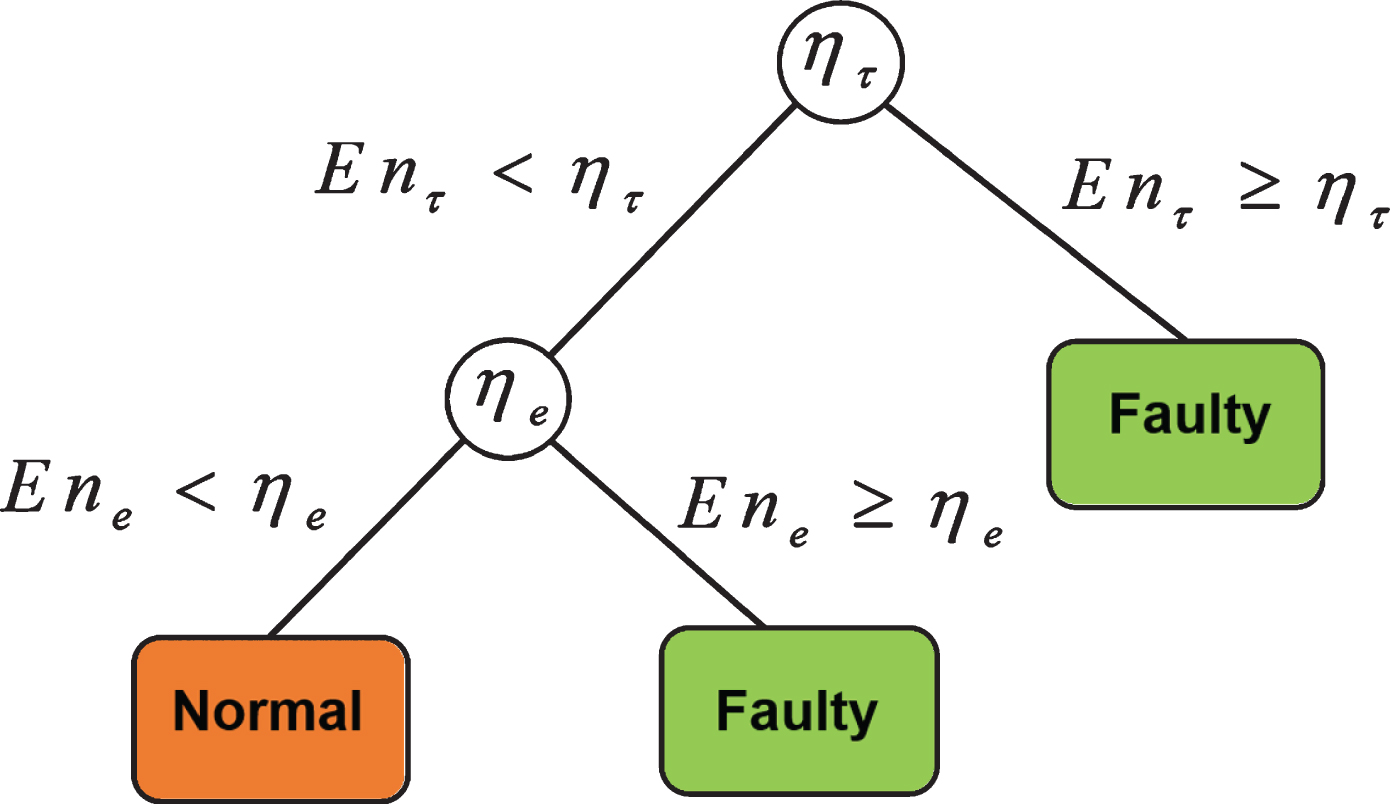
Graph diagram of the trained decision tree and classification rules used for fault detection with the AMSMO approach.
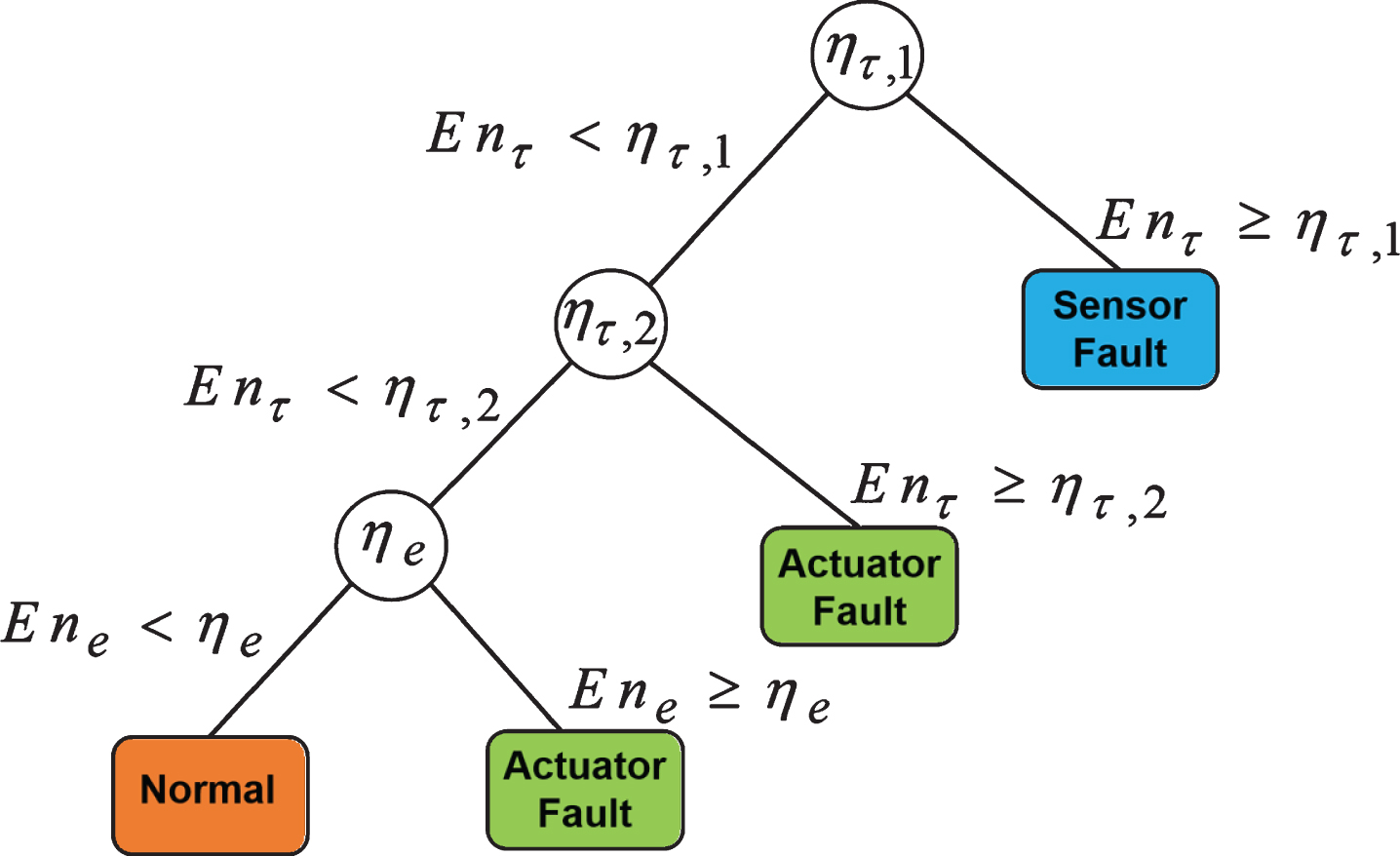
Graph diagram of the trained decision tree and classification rules used for fault diagnosis with the AMSMO approach.
Equation (24) and Fig. 5 correspond to the process of fault identification. Fault identification means that we attempt to make a decision between the two states of the system: normal or abnormal (i.e., when some fault is present) one. Specifically, we can see that if we want to differentiate the normal state from abnormal one, it is enough to compare the position energy value En e with the threshold of the position energy-η e . If the position energy value is smaller than the value of this threshold it means that the system is in its normal condition. If the energy value of torque load En τ exceeds or equal to the corresponding threshold value η τ , it can be claimed that the system is in its faulty condition. However, there is also a ‘mixed case’, where we should consider both energies to make a decision whether the system is in normal operating condition or any type of fault appeared. That is, when the position energy En e exceeds or equal to the threshold value η e and the energy of torque load En τ is smaller than the respective threshold value η τ , the system is in its faulty state. It can be concluded that to make a general decision between two conditions (i.e., normal or abnormal one), it is enough to utilize only two threshold values - for position energy and toque load. However, when it is needed to perform fault diagnosis (i.e., determining what type of the fault exactly happened in the system), from (25) and Fig. 6 it can be seen that more complex rules should be used. Also, instead of one threshold value for torque load η τ , the two threshold values should be defined: 1) the threshold of torque energy in sensor fault ητ,1, and 2) the threshold of torque energy in actuator fault ητ,2. As can be seen in (25), the original conditions presented in (24) were modified using the new introduced threshold values to differentiate various types of the faults. The Fig. 6 depicts the decision tree created by rules derived during the training process and expressed in (25).
After designing a machine learning-based AMSMO for FEDI, to reduce the effect of the fault, the active fault-tolerant controller for the robot manipulator based on the surface automated new sliding mode controller (SANSMC) is represented in this step. Based on Fig. 1, the FTC algorithm for the robot manipulator has the following sub-blocks: i) a robust controller for FTC based on SMC. ii) To reduce the system modeling dependency in the SMC, the new fuzzy SMC (NFSMC), based on the PID fuzzy technique, is designed and implemented in the robot manipulator. iii) To reduce the effect of the fault and increase the chattering attenuation, the adaptive T-S fuzzy SMO (AMSMO) is used in parallel with the NFSMC and the designed modern fuzzy SMC (MFSMC). iv) improving the robustness and chattering reduction of the MFSMC using the online tuning (OT) approach. Based on [24], the mathematical definition of the SMC technique is obtained by the following equation.
Here, T
SMC
, T
S
, T
M
and (κ
β
1
, κ
β
2
, κ
β
3
) are the overall torque based on the SMC, the switching (discontinuous) part of the SMC, the robot manipulator’s nonlinear dynamic of the SMC, and coefficients, respectively. Apart from several advantages of the SMC algorithm, this technique suffers from the system’s model dependency. To address the first issue, the new fuzzy SMC (NFSMC) model, based on the PID fuzzy technique, is designed and implemented in the robot manipulator. In the case of the classical PID fuzzy algorithm, the number of rule bases is represented by the following definition.
Here, R
N
, N1, N2 and N3 are the number of PID rule bases in the classical PID fuzzy technique, the number of linguistic variables for the first input, the number of linguistic variables for the second input, and the number of linguistic variables for the third input, respectively. To reduce the computation load (number of rule-base), the parallel fuzzy technique with two inputs is recommended in this research. Thus, the number of rule-bases in the new fuzzy technique is:
Fuzzy PD rule table to improve the SMO and design the NFSMO
To design the PI-like fuzzy algorithm, the integral term is used in the PD fuzzy technique. In this research, to avoid the design of a PI rule table, the PD rule table is used for the PI fuzzy technique, as well. Thus, the NFSMC is defined based on the following equation.
Based on Equation (30), the MFSMC reduces the effect of the fault in the robot manipulator. To improve the robustness and chattering reduction of the MFSMC the online tuning (OT) approach can be used. Based on Equation (30), κ
β
2
and κ1 are the main coefficients used to control of chattering phenomenon. To optimize these coefficients, the fuzzy OT technique is presented based on Equation (31). Here, TO is the output observer to improve the performance of the NFSMC.
Here, (κ
β
2-a
, κ1
a
) and ω
f
are the automated sliding surface slope and fuzzy-based auto-tuned sliding surface slope coefficient, respectively. Regarding Equations (30) and (31), the OTMFSMC is defined by Equation (32).
Based on Equation (32), the proposed OTMFSMC is used to decrease the effect of faults, increase the attenuation of the chattering phenomenon, reduce the model dependency, and increase the robustness of fault-tolerant control in the robot manipulator. Figure 7 illustrates the application of the FTC technique to reduce the effect of the fault based on the SMC, MFSMC, and OTMFSMC (the proposed technique). Based on this figure, the OTMFSMC technique is an effective technique to reduce the effect of the fault in the robot manipulator. Here, Ts(OT) and TO(OT) are the online tuning of the switching (discontinuous) part of OTMFSMC and the online tuning of the output observer to improve the performance of the OTMFSMC, respectively. Algorithm 1 illustrates the twelve steps to design the proposed machine learning-based automated robust hybrid observer based on the AMSMO for highly accurate fault estimation, decision tree algorithm for fault detection and identification, and the OTMFSMC technique for a fault-tolerant control algorithm for the six DOF PUMA robot manipulator.
Algorithm 1. The machine learning-based automated robust hybrid observer for fault estimation, detection, identification, and tolerant control of the robot manipulator
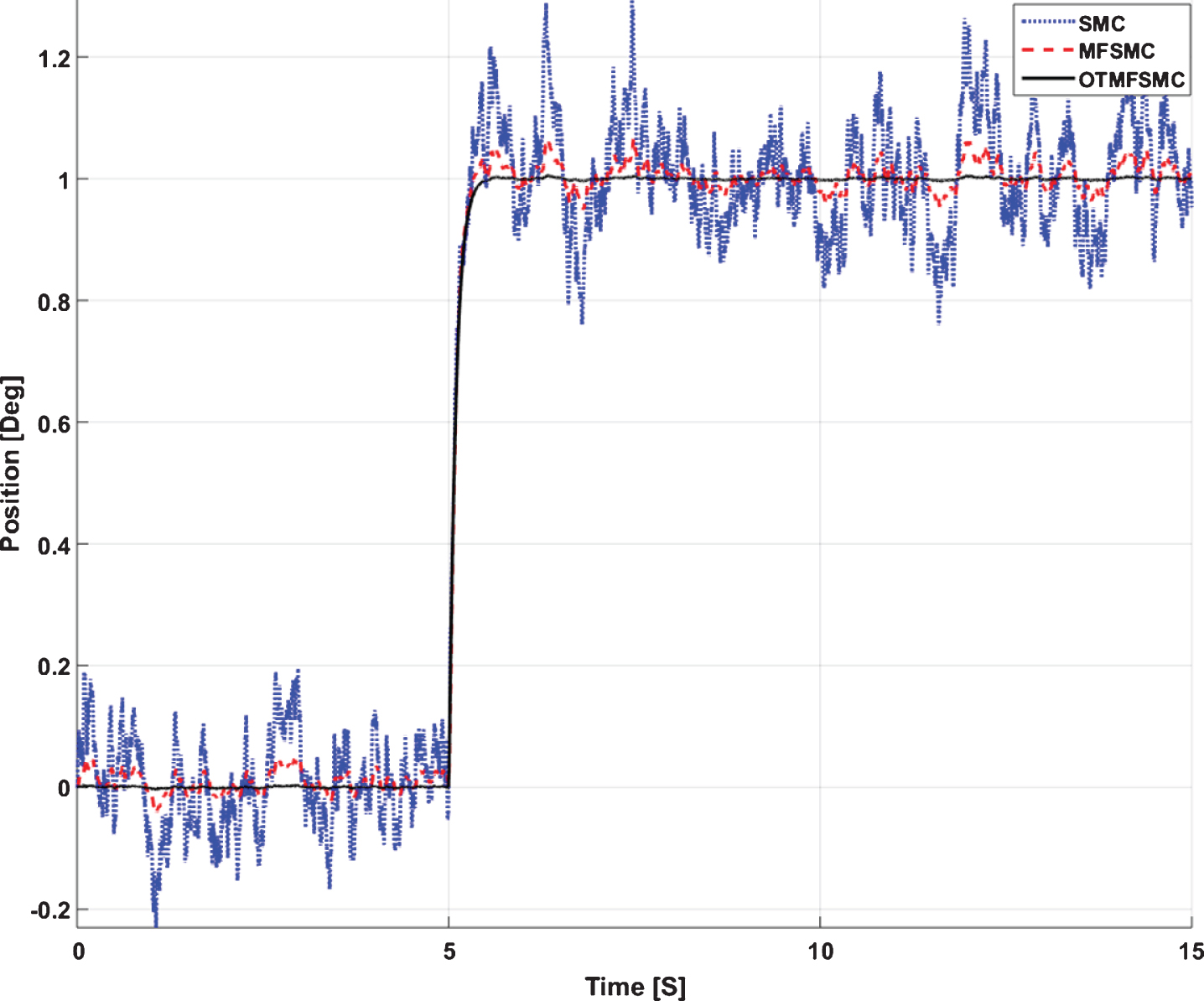
The fault-tolerant control algorithm performances based on the SMC, MFSMC, and OTMFSMC.
To evaluate the new technique for FEDIT, the 6-DOF PUMA robot manipulator is used. The PUMA robot manipulator is a 6 DOF, nonlinear, and coupling effect-filled system that is used in various research and industrial applications [24]. The result has three parts: a) residual signal analysis, b) fault identification performance evaluation, and c) fault-tolerant analysis.
Residual signal analysis
In the first step, FEDI for the decision tree-based AMSMO for a PUMA robot manipulator is analyzed. For FEDI, three techniques are compared: a) a decision tree-based SMO, b) decision tree-based MSMO, and c) decision tree-based AMSMO. In addition, to validate the FTC technique, the SMC, MFSMC, and OTMFSMC results are compared. Figures 8–10 illustrate the residual signals for actuator and sensor faults for the SMO, MSMO, and AMSMO.
Residual signals for an actuator fault, sensor fault, and the normal condition based on the SMO for the PUMA robot manipulator.
Residual signals for the actuator fault, sensor fault, and normal condition based on the MSMO for the PUMA robot manipulator.

Residual signals for the actuator fault, sensor fault, and normal condition based on the AMSMO for the PUMA robot manipulator.
Based on Fig. 8, the SMO has difficulty in identifying the actuator, sensor, and actuator-sensor faults because the actuator and normal residual torque signals have the same behavior. Figure 9 illustrates the residual signals for torque and position based on the MSMO. Though the performance of fault identification based on this technique is much better that of the SMO, this technique is not as accurate as the AMSMO. To improve the performance of fault identification for the SMO and MSMO, the AMSMO is illustrated in Fig. 10.
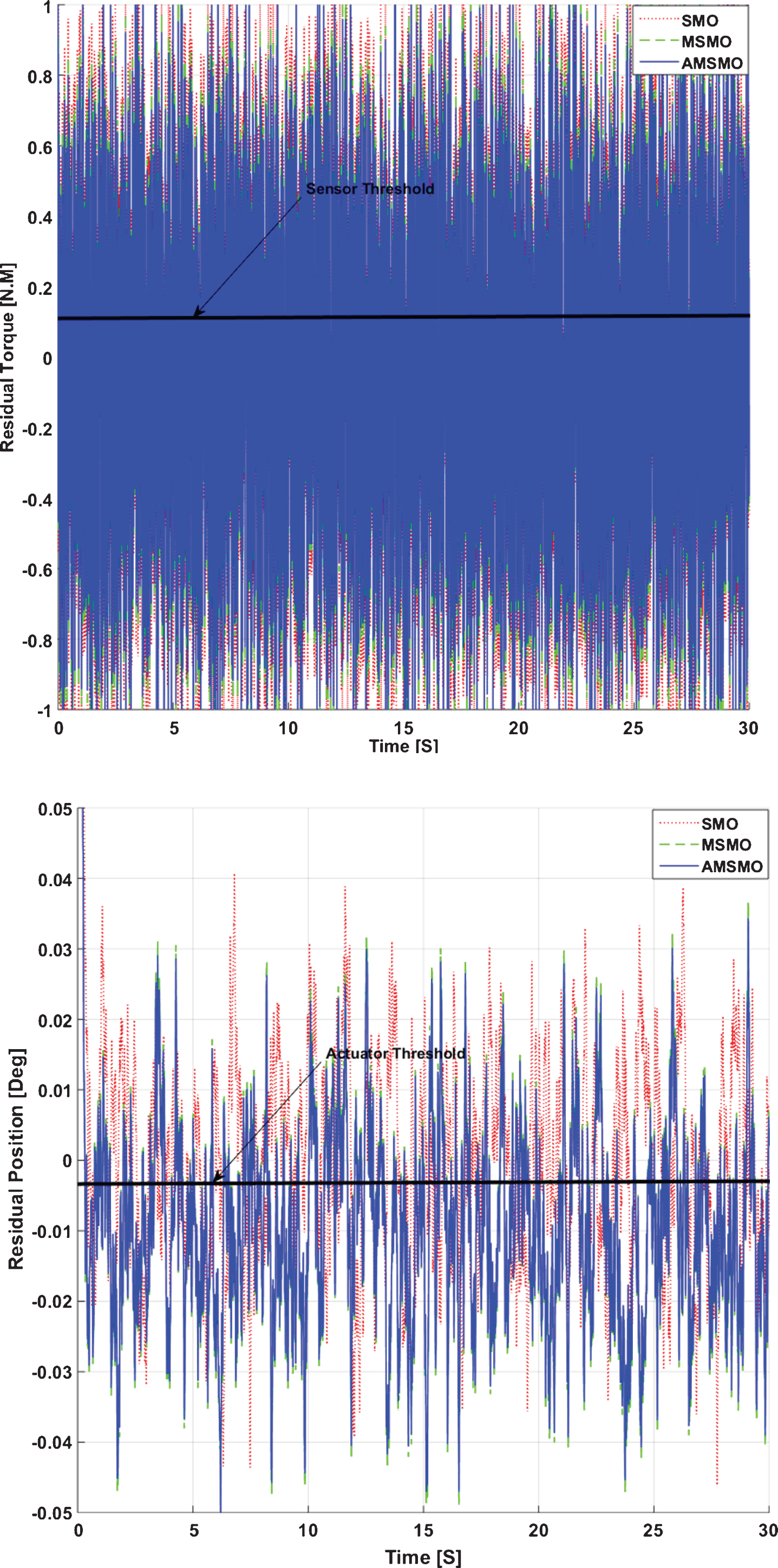
Based on Fig. 10, the AMSMO can be effectively used for fault detection and identification for the PUMA robot manipulator. Figures 11–13 show the power of fault identification (actuator fault, sensor fault, and actuator-sensor fault) in the SMO, MSMO, and AMSMO.
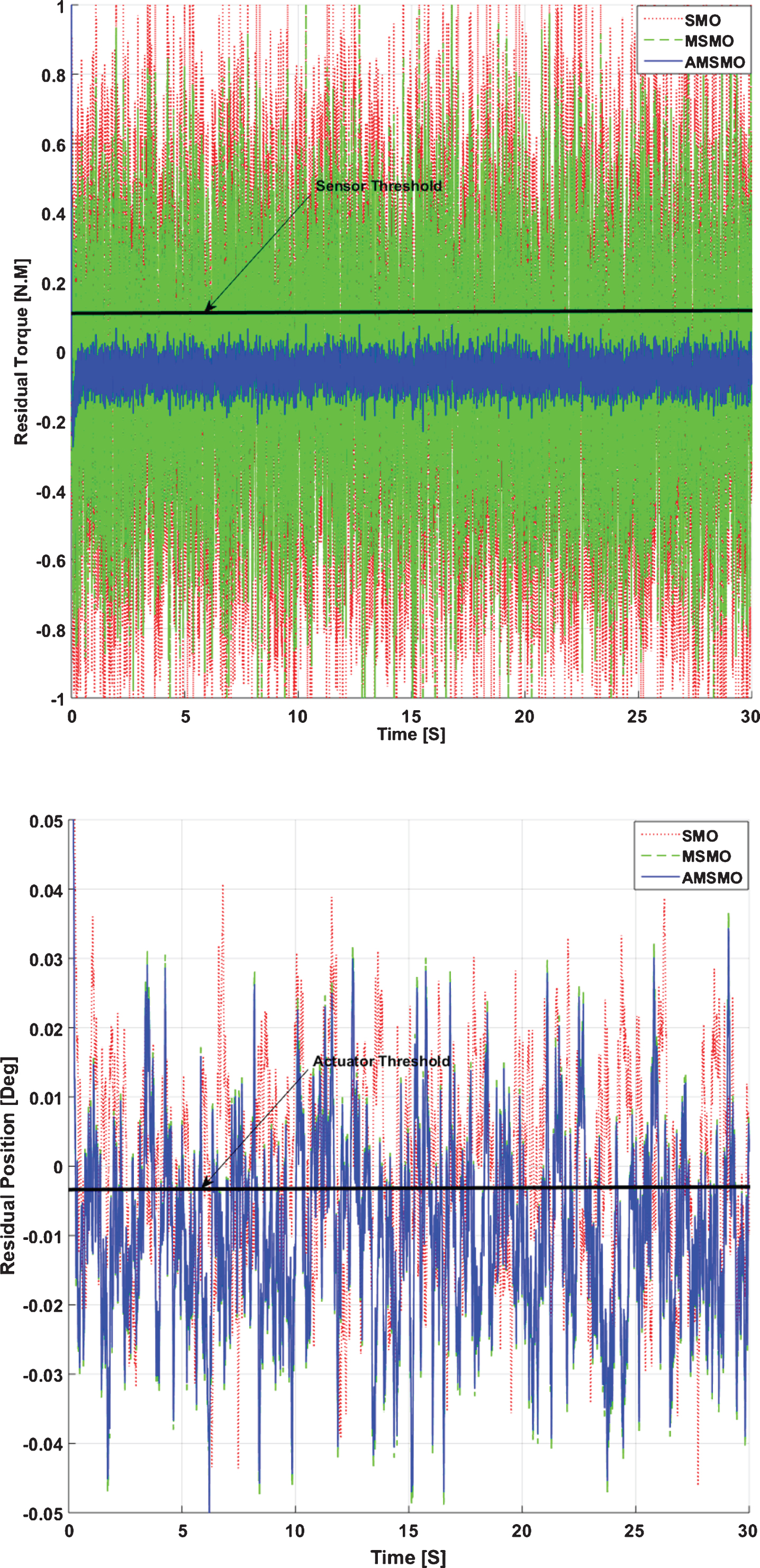
Residual signals for the actuator fault based on the SMO, MSMO, and AMSMO for the PUMA robot manipulator.
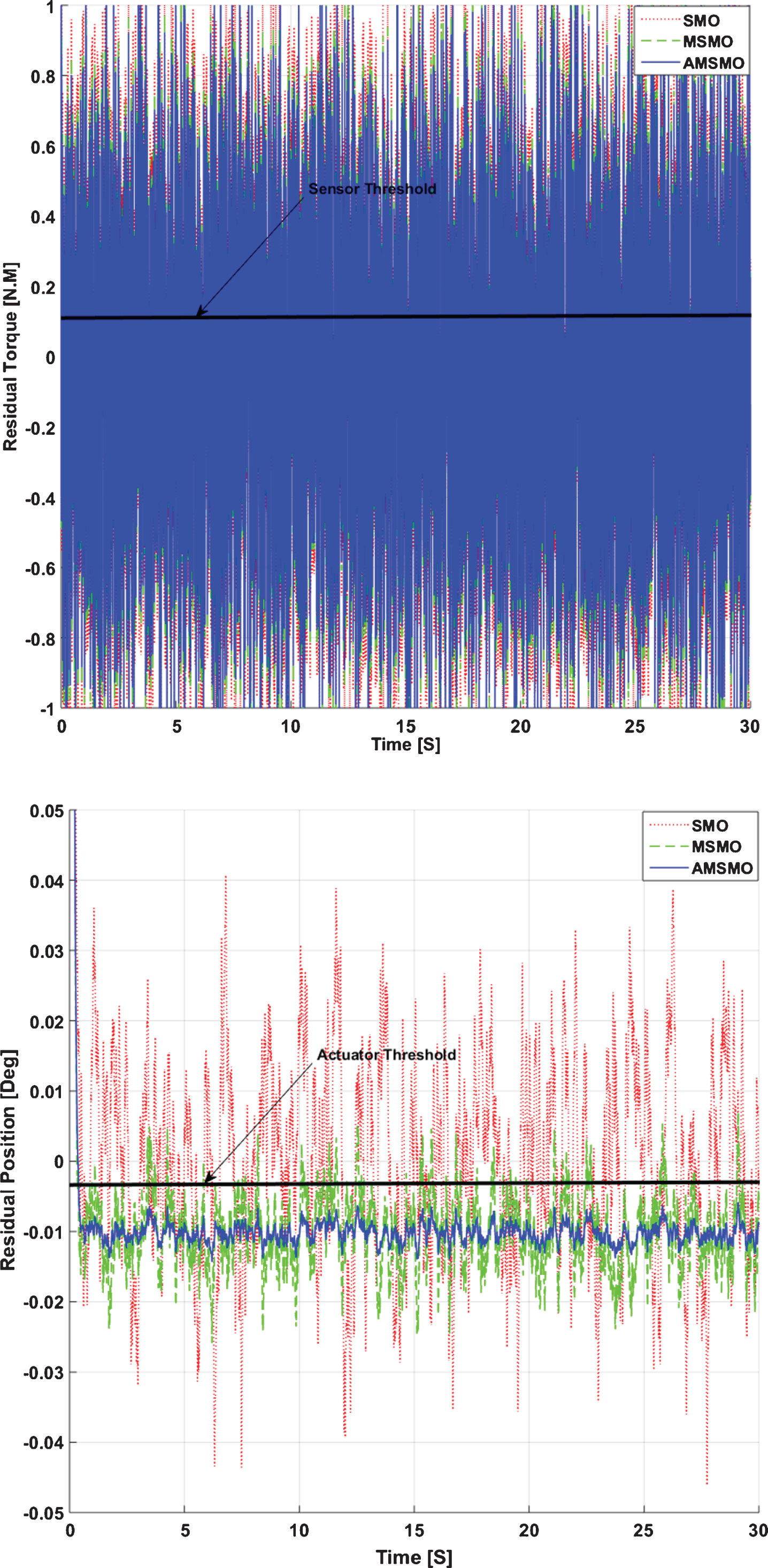
Residual signals for the sensor fault based on the SMO, MSMO, and AMSMO for the PUMA robot manipulator.
Residual signals for the actuator-sensor fault based on the SMO, MSMO, and AMSMO for the PUMA robot manipulator.
Figure 11 demonstrates the power of actuator fault identification based on the SMO, MSMO, and AMSMO.
To identify the actuator fault, two residual signals and two threshold values are significantly important. These are the torque residual signal, the position residual signal, the torque threshold value, and the position threshold value. Based on DT algorithm, to identify the actuator fault, the torque residual signal must be lower than the sensor threshold and the position residual signal should be greater than the actuator threshold.
Regarding Fig. 11, the torque residual signals in SMO and MSMO are bigger than threshold value, so, they have false alarm for actuator fault identification. According to Fig. 11, in AMSMO the torque residual signal is smaller than threshold and the position residual signal is bigger than threshold. Thus, the SMO and MSMO have problems in diagnosing actuator faults. Figure 12 shows the power of sensor fault identification based on the following methods, namely: the SMO, MSMO, and AMSMO.
To identify the sensor fault, two residual signals and two threshold values are important: the torque residual signal, the position residual signal, the torque threshold value, and the position threshold value. Regarding the DT algorithm, to identify the sensor fault, the torque residual signal must be greater than the sensor threshold and the position residual signal should be lower than the actuator threshold. Based on Fig. 12, the position residual signals in SMO and MSMO are bigger than position threshold value, so, they have false alarm for sensor fault identification. As clearly shown in the Fig. 12, the AMSMO has the best result for sensor fault identification. Figure 13 illustrates the power of multi- (actuator-sensor) fault identification based on the SMO, MSMO, and AMSMO in the PUMA robot manipulator. To identify the actuator-sensor fault, two residual signals and two threshold values are especially important.
These are the torque residual signal, the position residual signal, torque threshold value and position threshold value. To identify the actuator-sensor fault, the torque residual signal must be greater than the sensor threshold and the position residual signal should be greater than the actuator threshold.
Based on Fig. 13, however the position residual signals and torque residual signals in SMO and MSMO are bigger than position threshold value, but they have overlapping with actuator and sensor faults. Therefore, the AMSMO has the best result for actuator-sensor fault identification.
To quantitively evaluate the performance of the proposed AMSMO approach with decision tree-based decision-making and comprehensively investigate its fault diagnosis capabilities, we apply a 3-fold cross-validation technique to the learned classifier and compare the obtained results for the proposed method with those achieved by its counterparts, the MSMO and SMO. For this task, each of the datasets collected under different torque load conditions (i.e., 4 and 6 Nm, respectively) are first split into three subsets of equal size using stratified sampling (i.e., each of the subsets contains the instances corresponding to different operating conditions). Then, in each step of cross-validation, different combinations of two subsets are used for training the decision tree-based classifier, while the remaining subset is used for testing the trained classifier. In detail, at each step, 200 data instances corresponding to all the available signal classes are used for training the decision tree, while the remaining 100 samples are used for its testing. The resulting performance is expressed in terms of the recall values achieved for each of the signal classes, whereas the overall fault identification result is presented in terms of the average classification accuracy (ACA) metric computed during the 3-fold cross-validation procedure. Note that in this paper, we show the recall values recorded from the cross-validation step where the highest classification accuracy was achieved. The experimental results are tabulated in Table 3 and the confusion matrices obtained during the experiment are depicted in Fig. 14.
Experimental results of fault diagnosis expressed in terms of Recall and ACA metrics
Experimental results of fault diagnosis expressed in terms of Recall and ACA metrics

Confusion matrices corresponding to the AMSMO, MSMO, and SMO approaches under variable torque load levels.
Overall it can be concluded that the proposed ML-based automated robot observer is highly effective in detecting and identifying the operating conditions of the robot manipulator under different torque load levels. The best results demonstrated by the proposed methodology improve the best results achieved by the MSMO and SMO approaches by 12% and 23%, respectively. The results in Table 3 demonstrate that the proposed methodology outperforms the referenced techniques in terms of ACA, with 98.3% achieved for a torque load equal to 4 Nm and 96.7% for a torque load equal to 6 Nm, respectively. Moreover, from Table 3 it can be observed that for all of the signal classes under variable torque load conditions, the recall metric achieved by the proposed approach is higher than its counterparts. The confusion matrices from Fig. 14 show that all of the methods show high recall values when identifying a sensor fault of the robot manipulator, whereas higher rates of misclassifications can be seen when differentiating the normal and actuator fault conditions. However, it is clearly seen that the proposed solution using the AMSMO technique and decision trees for fault identification and diagnosis demonstrates the smallest numbers of misclassified samples for all of the signal classes in comparison with its counterparts. Overall it can be concluded that the proposed ML-based automated robot observer is highly effective in detecting and identifying the operating conditions of the robot manipulator under different torque load levels.
Figure 15 shows the power of FTC in the SMC, MFSMC, and OTMFSMC for the PUMA robot manipulator. Regarding this figure, the OTMFSMC (proposed) method is more robust and reliable than the SMC and MFSMC for FTC in the PUMA robot manipulator.
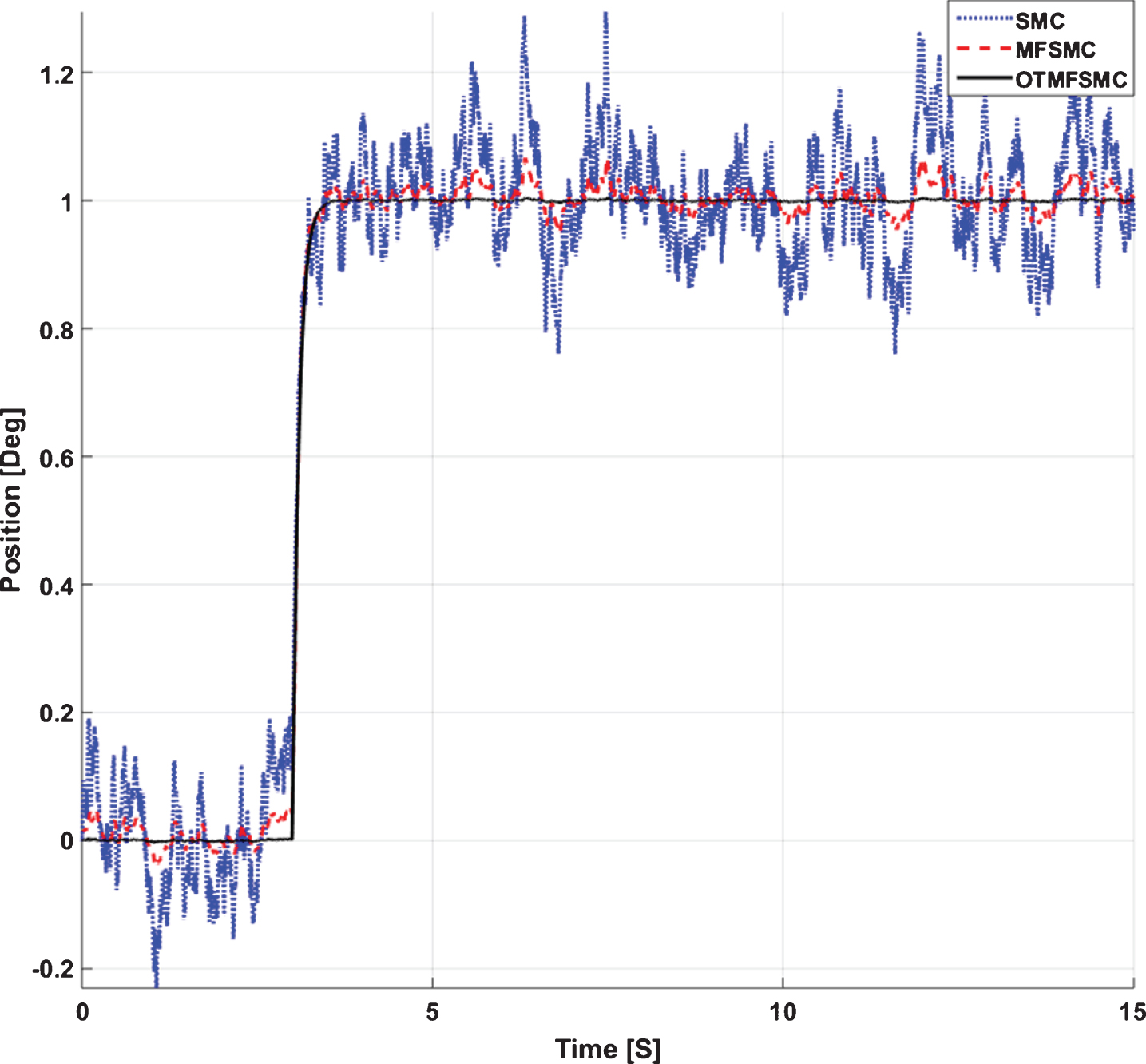
Fault-tolerant control technique based on SMC, MFSMC, and OTMFSMC for PUMA robot manipulator.
This paper proposed a decision tree-based automated robust hybrid observer for FEDI based on the AMSMO and FTC based on the OTMFSMC in a robot manipulator. A robot manipulator is a highly nonlinear system that works in uncertain and unknown conditions. To model the robot manipulator, the mathematical system modeling is presented in the first step. In the second step, the SMO is designed for highly accurate fault observation.
To reduce the high-frequency oscillation and increase the observation performance, the STHSMO is considered. The signal/fault estimation accuracy was the next issue of the SMO and STHSMO. Thus, to solve this issue, the MSMO was presented. To increase the reliability of the fault observation method, the adaptive technique was applied to the MSMO to design the AMSMO. To perform fault detection and identification in the presence of uncertainties, decision trees govern the AMSMO to find the exact solution for fault diagnosis for the actuator, sensor, and actuator-sensor faults in the robot manipulator. To make the robot manipulator tolerant of actuator, sensor, and actuator-sensor faults, the SMC technique was proposed. To reduce the system’s dependency on the nature of the fault, the NFSMC is proposed for robot manipulator. Apart from the advantages of this technique, the NFSMC suffers from chattering. To solve the chattering issue in the NFSMC, the MFSMC was recommended. Increasing the robustness and reducing the chattering are the next challenges in the MFSMC that can be solved by the online tuning (OTMFSMC) technique. The effectiveness of the proposed algorithm is validated using a publicly available PUMA robot manipulator. The proposed decision tree-based automated robust hybrid observer outperformed the MSMO and SMO for FEDI; and the MFSMC, and SMC for FTC. As a result, the AMSMO improves the average performance for fault identification by about 12% and 23% compared with the MSMO and SMO, respectively. Moreover, the proposed method (OTMFSMC) improves the average of the FTC error performance by about 19% and 26% compared with the MFSMC and SMC, respectively. In our future work, we would like to verify the applicability of deep-learning-based observation techniques to fault diagnosis and fault-tolerant control in the robot manipulator. Additionally, other techniques for combining the observation techniques, control algorithms, and deep- learning procedures will be produced.
Footnotes
Acknowledgments
This work was supported by the Korea Institute of Energy Technology Evaluation and Planning (KETEP) and the Ministry of Trade, Industry & Energy (MOTIE) of the Republic of Korea (No. 20192510102510).