
Abstract
Pythagorean fuzzy sets (PFS) are an extension of intuitionistic fuzzy sets introduced by Atanassov [1]. PFSs have the advantage of providing larger domains for assigning membership and non-membership degrees satisfying that their squared sum is at most equal to one. PFS have been often used in modeling the problems under vagueness and impreciseness in order to better define the problems together with the hesitancy of decision makers. Different human emotions and behaviors can be modeled in humanoid robots (HR) by fuzzy sets. In this paper, facial expressions of a humanoid robot are modeled depending on the degrees of the emotions. Larger degree of emotion causes a stronger indicator of the facial mimic.
Keywords
Introduction
A HR is a robot having a body shape similar to the human body in order to resemble the human behaviors. Humanoid robots will be very usable in human society to improve the quality of life in the future. Humanoid robots are being developed to perform human tasks like personal assistance. They can assist the sick and elderly people, and dirty or dangerous jobs. Humanoid robots imitate human mechanisms of decision making and information processing. In the literature, humanoid robots have been studied for biped walk control [21], cooperative object transformation [10], gender representation [5], emotion and sociable humanoid robots [4], health assist (Robins et al., 2005), customer acceptance [3], speaker recognition [6].
In computing, “plug & play devices” do not need for physical device configuration or user intervention in resolving resource conflicts. Later, the term “plug & play” has been often converted to “plug & pray”, which corresponds to the promise, problems and ethics of artificial intelligence and robotics. Plug & pray refers to user skepticism about the functionality of a new technology or device. The term plug & pray indicates that the user doesn’t really know if the technology will work; he or she will simply plug in the hardware and hope for the best. These devices might be simple to install, but may not work as they were intended to. A HR is one of the most complex devices which you can use the term “plug & pray”. Human behaviors are mostly emotional and based on the degrees of feelings such as being strongly sad or being slightly happy. Fuzzy sets theory can be very useful in modeling humanoid robots’ emotions and behaviors. In this paper, we present examples of Pythagorean fuzzy modeling of humanoid robots.
Ordinary fuzzy sets theory has been expanded to many new extensions from its first introduction by Zadeh [29] to the present. New extensions try to represent the thoughts of humans more correctly with more details. It is clear that classical logic is not sufficient to handle so complex human emotions. Figure 1 illustrates the flow chart of fuzzy logic history with new extensions each as a milestone.
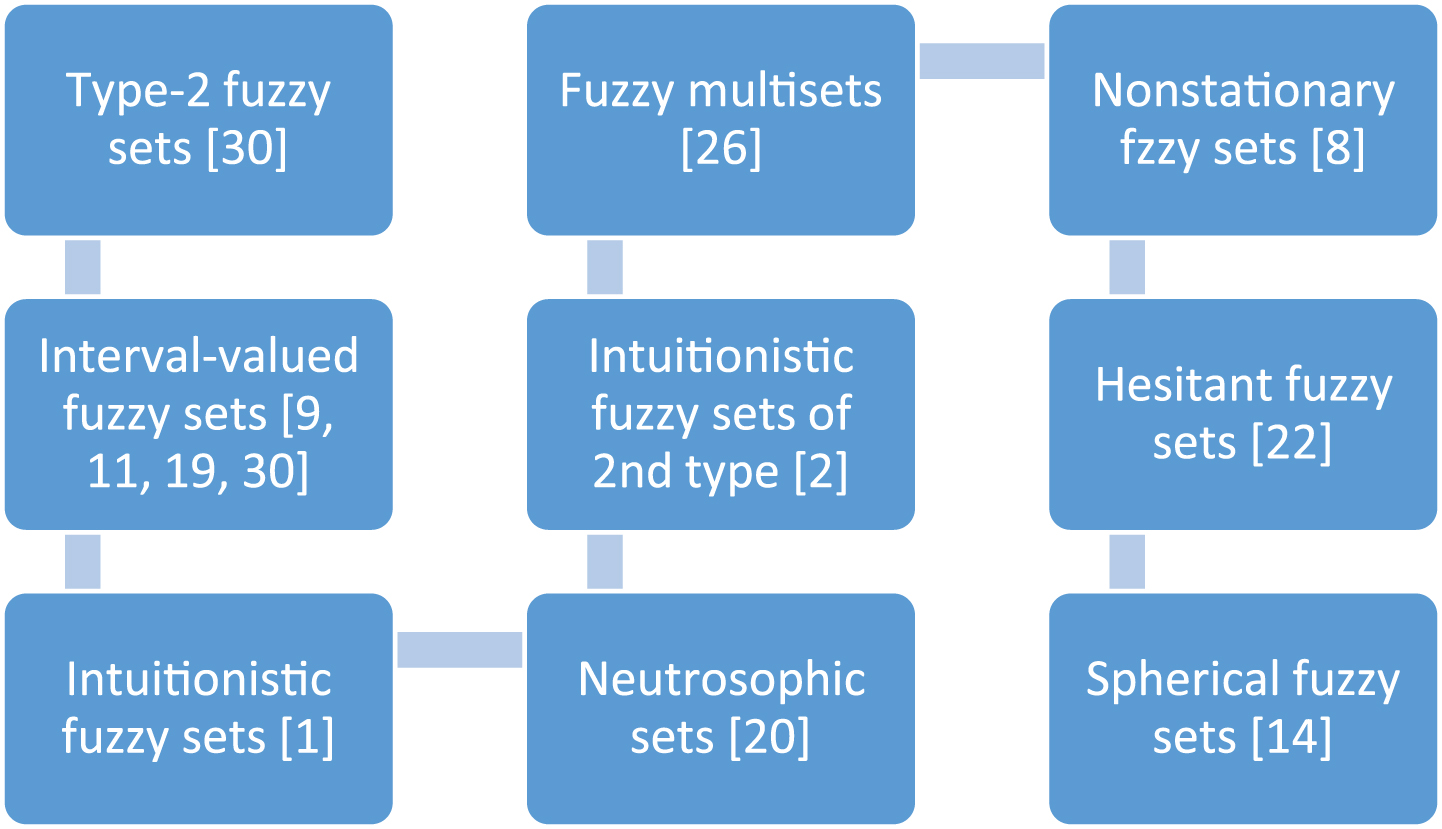
Extensions of fuzzy sets.
Intuitionistic fuzzy sets (IFS) have been introduced by Atanassov [1] which differ from ordinary fuzzy sets by an independent membership degree that is not necessarily the complement of membership degree. The secondary extensions of IFS, which are Pythagorean fuzzy sets, fermatean fuzzy sets and ultimately q-rung orthopair fuzzy sets aim at providing a larger domain to experts than it is in IFS.
Figure 2(a) illustrates humanoid robots. Sophia has been developed by Hong Kong based company Hanson Robotics in 2016. Sophia has only 60 different facial expressions whereas the number of real human facial expressions might be infinite. Kodomoroid developed by Hiroshi Ishiguro Laboratories in 2014 is a teleoperated humanoid robot resembling a human child. It can recite news reports gathered from around the world 24 hours a day in a variety of voices and languages. Jia Jia, has been developed by a Chinese team at the University of Science and Technology of China in Hefei. Jia Jia can move her arms, create different facial expressions, and answer to human conversations. Mirai Madoka, which is similar to Toshiba robots, has been developed by a Japanese tech Orix car rental agency in 2016. Junko Chihira is a humanoid developed at Toshiba. She has the ability to make human-like facial expressions. Junko Chihira currently works at a tourist information centre on Tokyo’s waterfront, greeting visitors in Japanese, English, and Chinese. Figure 2(b) illustrates hypothetical humanoid robots, which do not require changing facial expressions under various conditions.
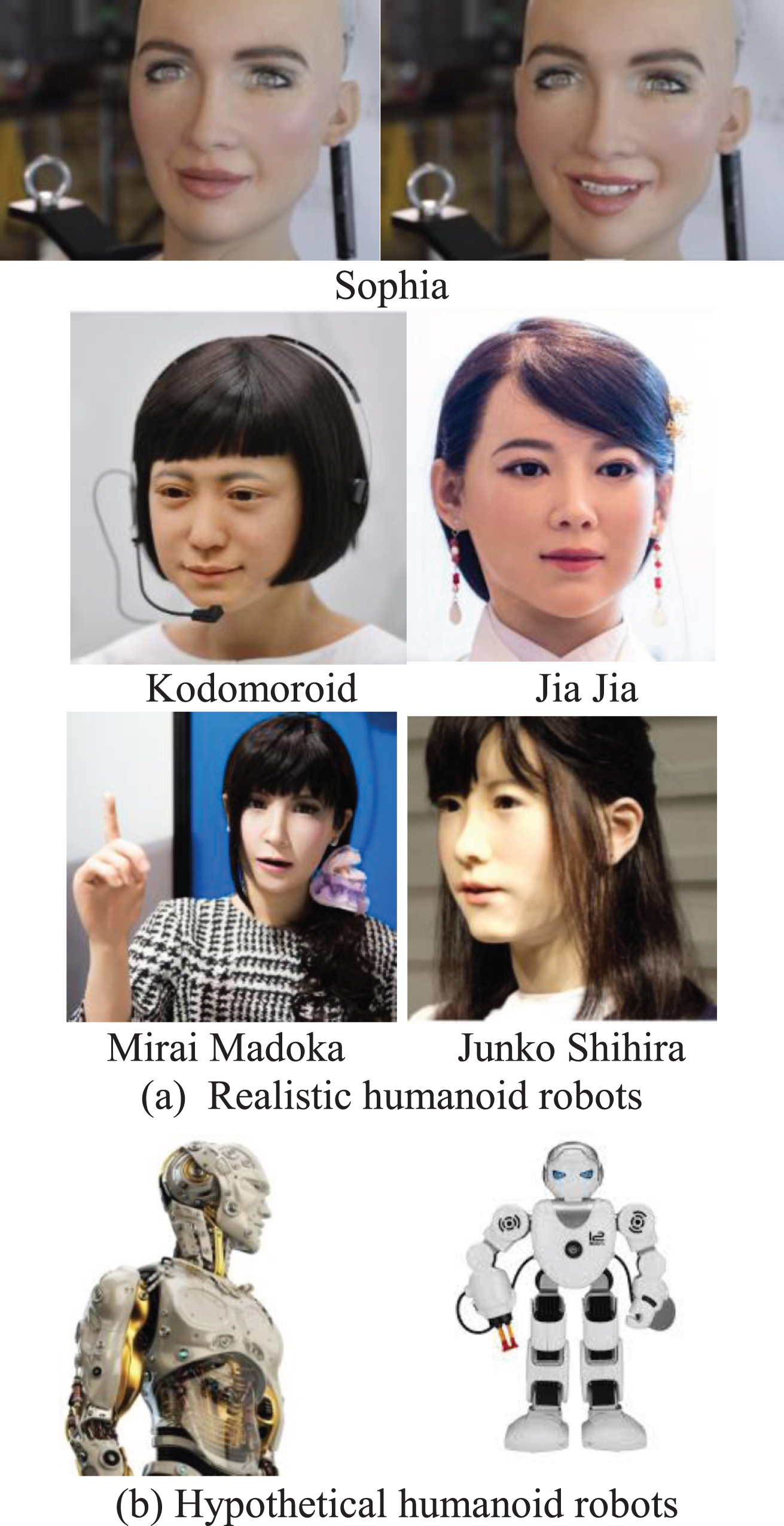
Humanoid robots of present and future.
In this paper, we try to model the face expressions of HRs using Pythagorean fuzzy sets and fuzzy functions in order to express the emotional feelings of HRs. In the literature, there are very few works on fuzzy or intelligent modeling of humanoid robots. Katic and Vukobratovi [13] surveyed intelligent control techniques for humanoid robots. Wong et al. [25] studied fuzzy control of humanoid robots. Fang et al. [7] studied fuzzy brain emotional learning models.
The rest of the paper is organized as follows. Section 2 summarizes the basic definitions PFS. Section 3 presents face expressions of HRs using PFS. Section 4 concludes the paper with future directions and suggestions.
The main idea of PFS comes from intuitionistic fuzzy sets. PFS have been proposed by Atanassov [2] first time as type-2 IFS. Later, Yager [28] developed type-2 IFS and called it PFS. In the following, preliminaries of IFS and PFS are briefly presented.
Intuitionistic fuzzy sets
The intervals
For each element x, the hesitancy (indeterminacy) degree of an IVIFS of x ∈ X in

Triangular intuitionistic fuzzy number.
Yager [28] introduced Pythagorean fuzzy set (PFS) characterized by a membership degree and a non-membership degree satisfying the condition that the squared sum of its membership degree and non-membership degree is equal to or less than 1, which is a generalization of IFS.
The degree of indeterminacy is defined as follows:
For two PFSs, the following arithmetic operations are valid:
The degree of indeterminacy is given by Equation (16).
In Equation (21), the terms (1-c) and (1-d) convert non-membership degrees to membership degrees while the term
The facial expression of a HR must be appropriate to the event it meets. Even the scientists discovered that humans have 21 different facial expressions, which are Happy, Sad, Fearful Angry, Surprised, Disgusted, Appalled, Happily surprised, Happily disgusted, Sadly fearful, Sadly angry, Sadly surprised, Sadly disgusted, Fearfully angry, Fearfully surprised, Fearfully disgusted, Angrily surprised, Angrily disgusted, Disgustedly surprised, Hatred, and Awed, you cannot classify the facial expressions by discrete sets. Besides, there are discussions on if the facial expressions are universal or vary from a culture to another. A HR’s facial expression is a matter of degree that the HR should feel when it meets an event. Figure 4 presents some of these expressions on a woman [23].
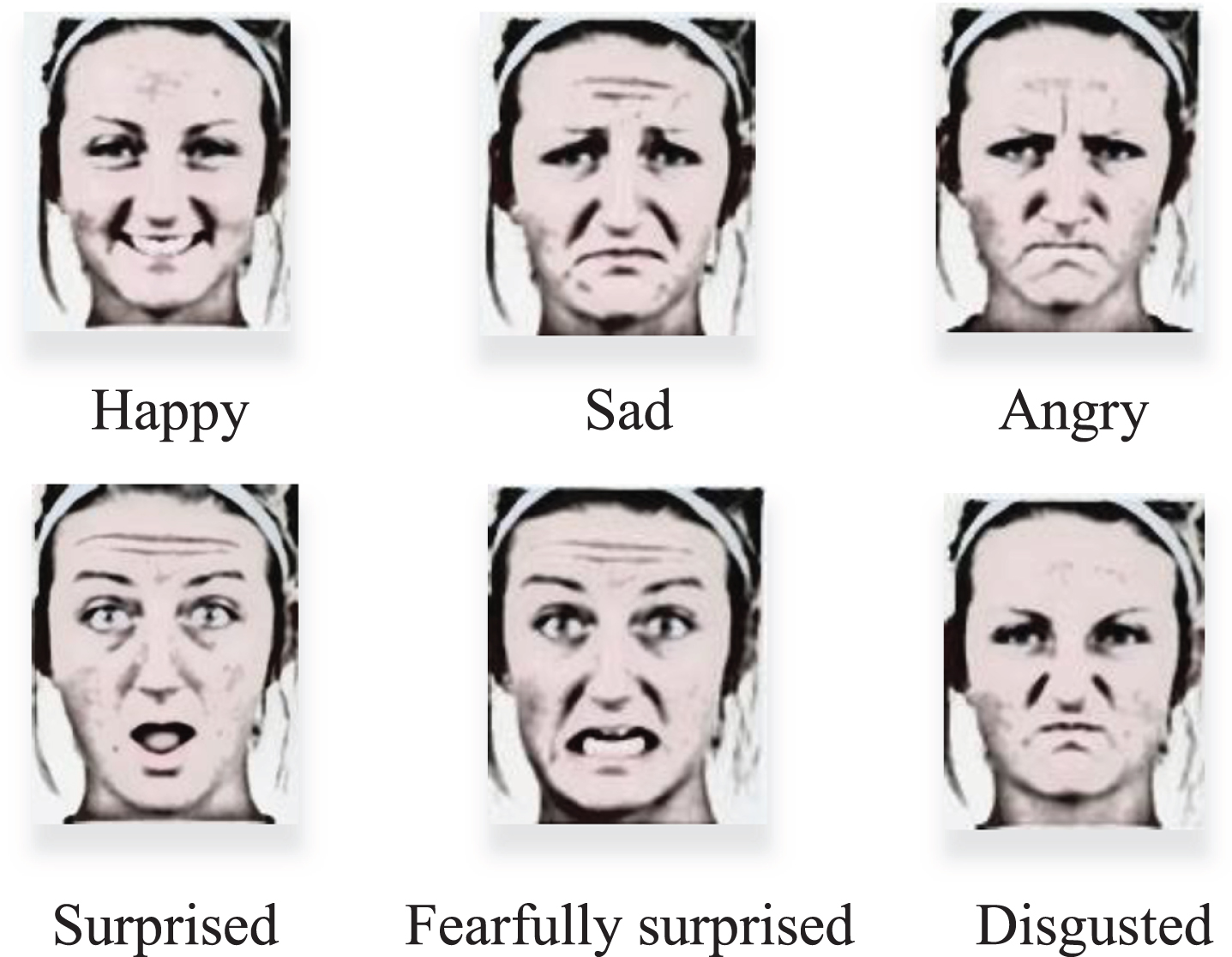
Different facial expressions of a woman.
Mathematical relations for some of the most common facial expressions can be in the form of simple mathematical functions such as translations and sinusoidal functions which can model expressions such as smiling, frowning and eyebrow raising. Using classical functions, the face expressions are tried to model as illustrated in Fig. 5 [24].
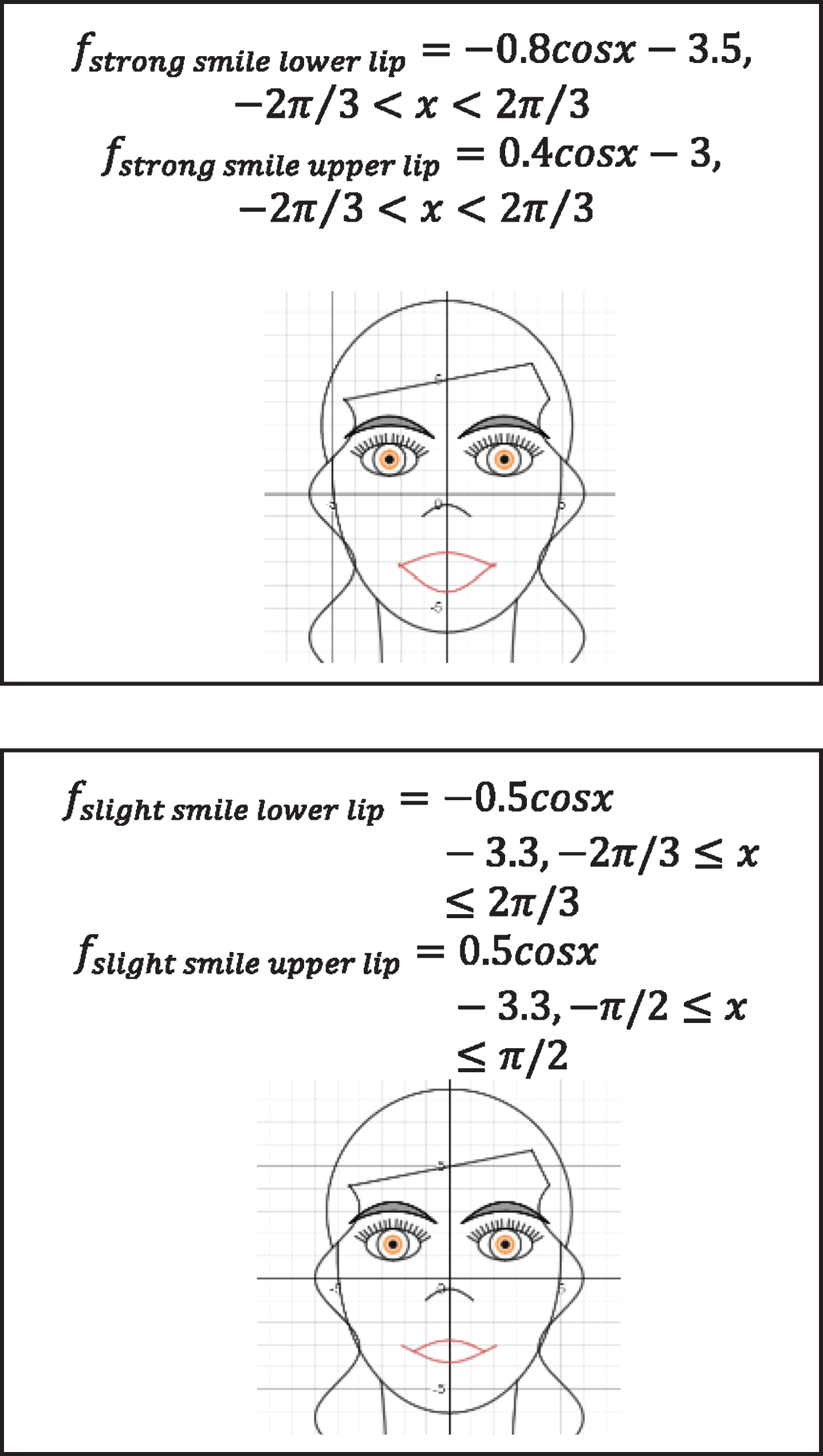
Smile using mathematical functions.
The crisp smile functions can be modeled by using IFS and PFS as follows. Assume that the humanoid robot’s smile upon an event should be between medium smile (k = 0.6) and very slight smile (k = 0.1) by considering the lower lip function where the coefficient k is as in Equation (23)
The smile function of Equation (23) may vary as in Fig. 6 with different k values between 0.1 and 0.6 for very slight smile to medium smile. We will also examine the smile function of Equation (24) with different values of k between 0.7 and 1.0 for strong smile to very strong smile.
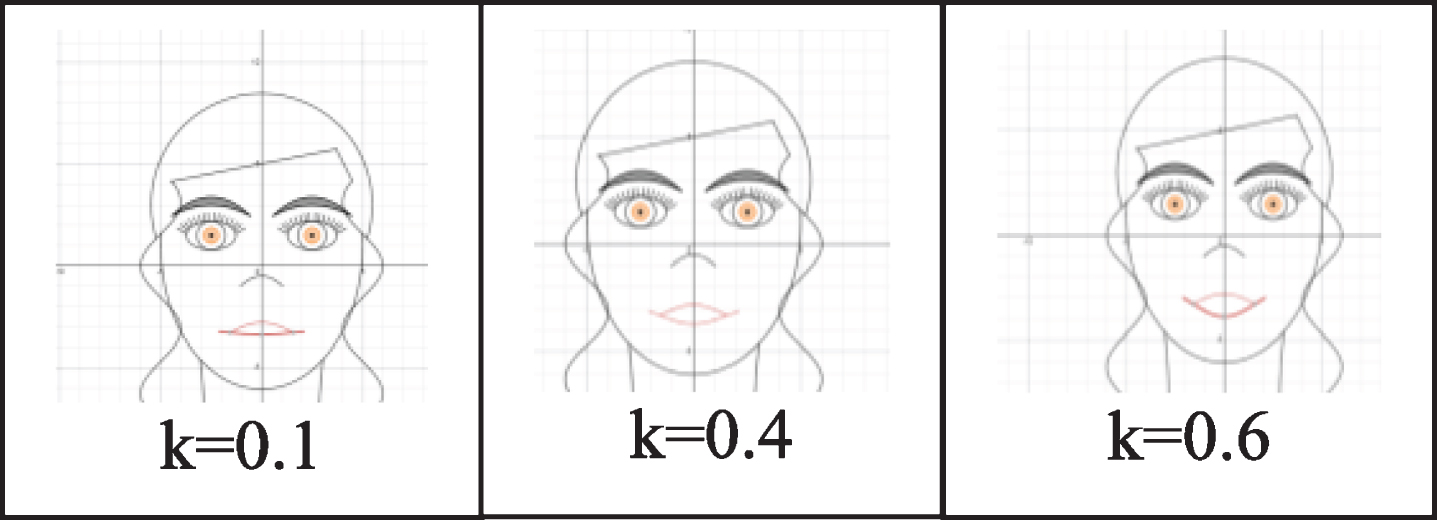
Smiles between very slight smile to medium smile for lower lip.
Let us assume the membership function be defined between 0.20 and 0.50 and the non-membership function be defined between 0.10 and 0.60 for very slight smile to medium smile in Equation (23). This can be represented by a Pythagorean fuzzy number whose squared sum of upper limits of membership and non-membership is 0 . 502 + 0 .602 = 0.61 as given in Fig. 8.

Smiles between strong smile to very strong smile for upper lip.
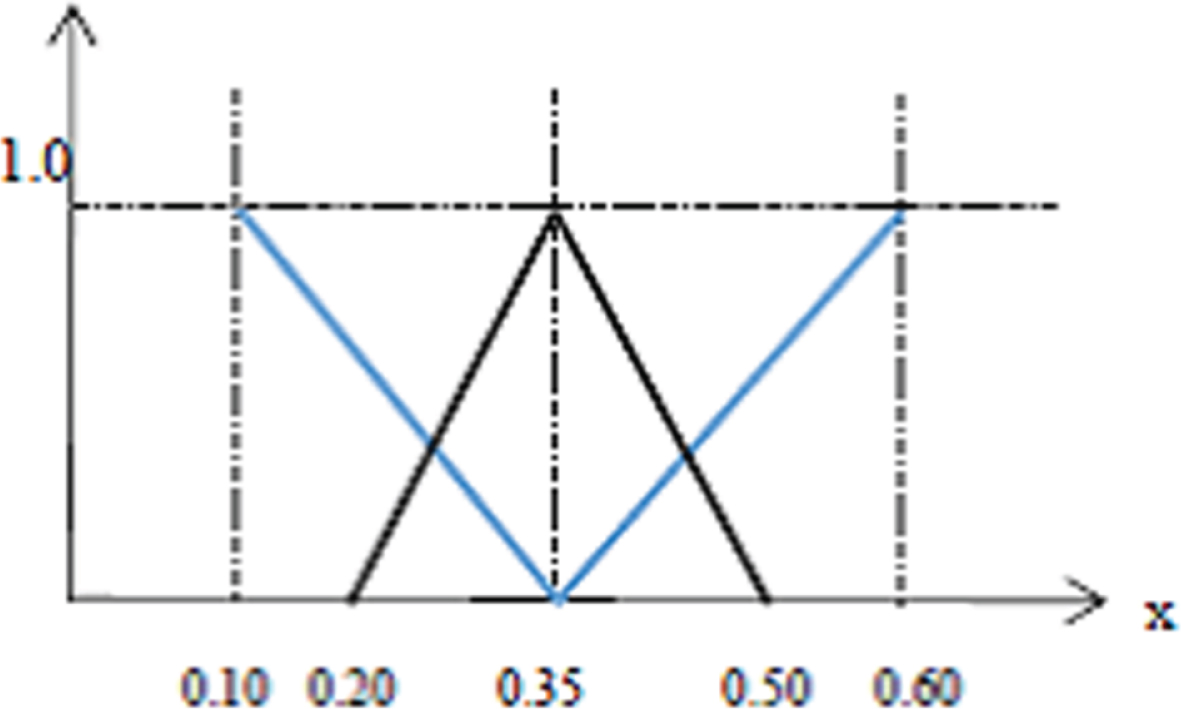
Pythagorean fuzzy number for the coefficient k in Equation (23).
For Equation (24), the membership function can be defined between 0.70 and 0.90 and the non-membership function be defined between 0.10 and 0.20 for strong smile to very strong smile. This can be represented by a Pythagorean fuzzy number whose squared sum of upper limits of membership and non-membership is 0 . 902 + 0 .202 = 0.85 as given in Fig. 9.

Pythagorean fuzzy number for the coefficient k in Equation (24).
The function in Fig. 8 can be represented by the following α-cuts:
The function in Fig. 9 can be represented by the following α-cuts:
The fuzzy function between very slight smile and medium smile (vss&ms) then becomes fvss&ms = - ([0.20 + 0.15α, 0.50 - 0.15α], [0.35 - 0.25α, 0.35+ 0.25α]) cosx - 3.3, - 2π/3 ≤ x ≤ 2π/3.
Using Equation (21), we obtain
The fuzzy function between strong smile and very strong smile (ss&vss) becomes
Using Equation (21), we obtain
Table 1 gives us the defuzzified values of the IVPF number depending on the various α values for lower lip. Table 2 presents the results of the fvss&ms function with respect to the defuzzified values given in Table 1.
Defuzzified values of IVPF number in fvss&ms
Results of the fss&vss function with respect to the defuzzified values
Using the values in Table 2, the graph in Fig. 10 is obtained for α= [0, 1]. For larger membership degrees in IVPF numbers, the smile gets stronger. Table 3 gives us the defuzzified values of the IVPF number depending on the various α values for upper lip. Table 4 presents the results of the fss&vss function with respect to the defuzzified values given in Table 3. Using the values in Table 4, Fig. 11 is obtained.
Defuzzified values of IVPF number in fss&vss
Results of the fss&vss function with respect to the defuzzified values
The similar continuous membership functions can be defined for the other elements of a face such as eyebrow and eye orb. Figure 12 illustrates the behavior of eye orb for the different values of k in Equation (25).
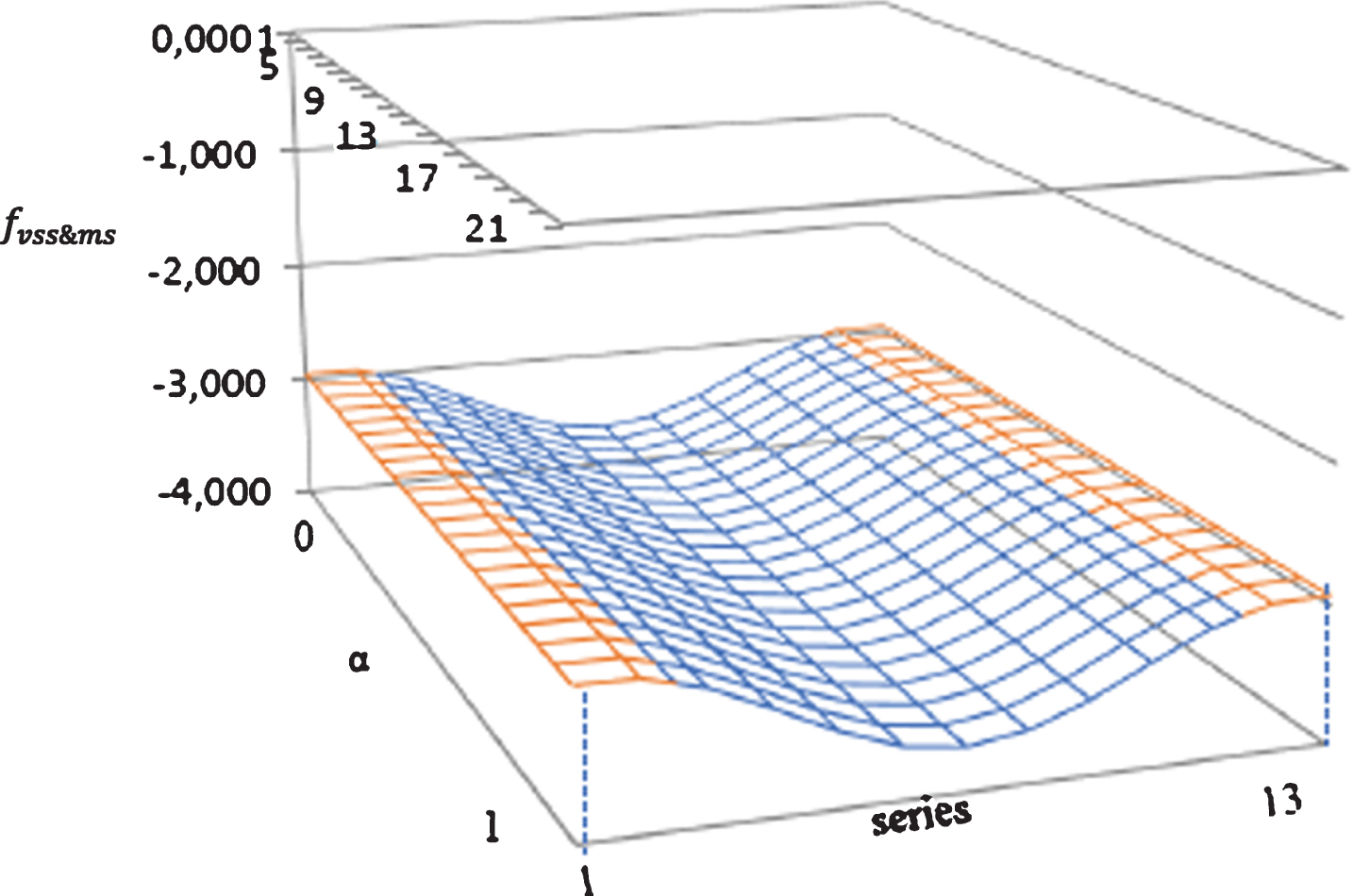
fss&vss functions of lower lip for α= [0, 1].
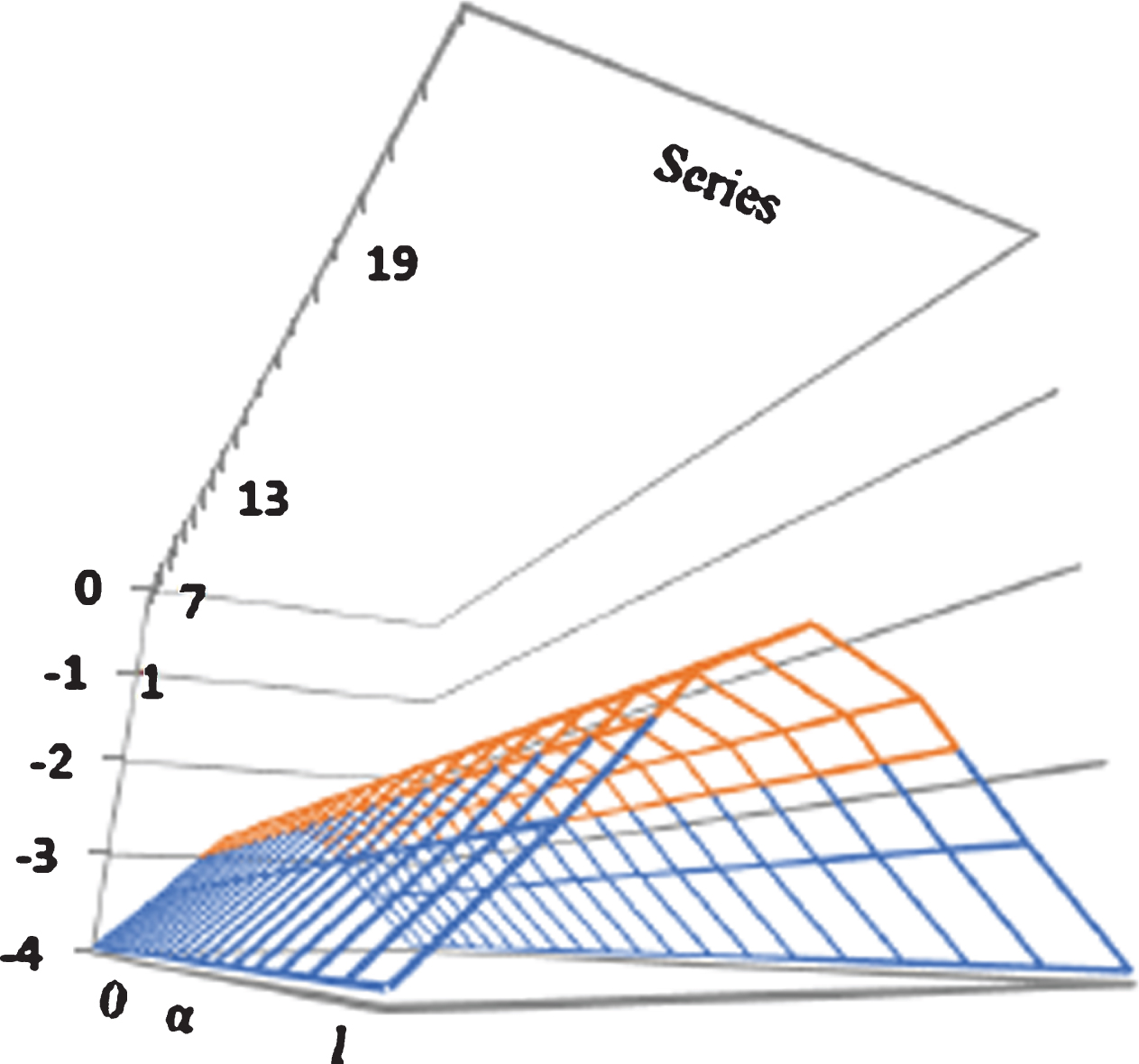
fss&vss functions of upper lip for α= [0. 1].
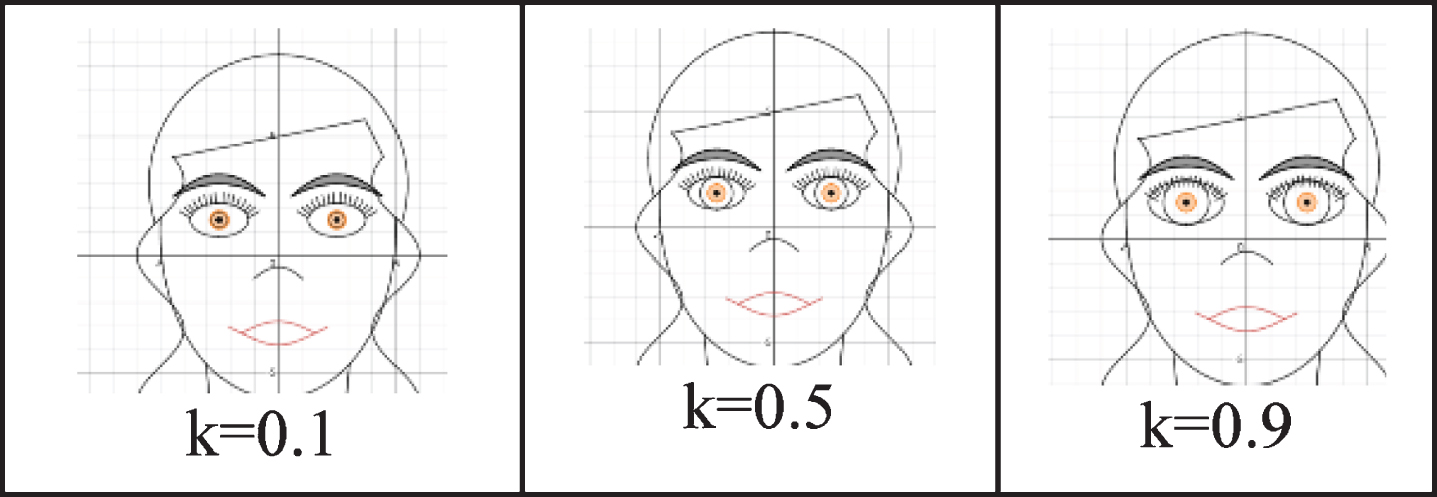
Eye orb for different k values.
New extensions of type-1 fuzzy sets try to define a more detailed membership function with additional new parameters. These parameters can be successfully used in modeling the human-like behaviors of humanoid robots. For instance, the high degree of hesitancy parameter can lead a humanoid robot to require additional information on the problem. Equal degrees of membership, non-membership, and hesitancy parameters may cause the robot to select any alternative with equal possibilities while a higher degree of membership or non-membership than hesitancy degree can do it with a larger possibility. The fuzzy extensions such as Pythagorean fuzzy sets or spherical fuzzy sets can present larger domains for humanoid robots to judge about the decision making problems they face. Every mimic and movement of humanoid robots can be directed by these membership functions much easier than classical control mechanisms. The limitation of this work is its two dimensional approach to face expressions while a real HR requires three dimensional modeling. For further research, we suggest these new extensions to be used in modeling the humanoid robots’ emotional movements.