
Abstract
For some dexterity robotic tasks, such as turning a constrained dynamic object, rolling motion is a crucial advanced characteristic, which for the human hand is possible from the shape and soft tip in our fingers. This paper presents the manipulation of a rigid constrained dynamic circular object using a robotic finger equipped with a hemispherical and soft tip. Assuming that object angle measurement is not available, a force-position regulator is proposed to guarantee the control of contact force, as well as the object angle throughout the tangential force. To establish the relationship between the rolling angle and the tangential force, the use of Echo State Network (ESN) becomes instrumental. A novel smooth weight adaptation scheme steered by a sliding mode attractor, for readout network is proposed. Stability conditions are obtained to guarantee convergence in finite time using small feedback gains and piecewise continuous functions. Additionally, the local asymptotic stability of the pair robot-object is guaranteed without force sensing, not either any knowledge of the deformation nor penetration measurement, leading surprisingly to a simple blind touch-type controller for such difficult task. Finally, numerical simulations show the learning rule contribution and the behavior of the closed-loop system.
Keywords
Introduction
Based on physiology studies that elucidate how human sensory-motor coordination or motor control is carried out as many distributed processes, roboticists have proposed approaches to reproduce some of these functionalities to increase robot skills. In this way, the robot manipulation has been studied under very hard assumptions, such as exact knowledge of the system and full sensory feedback, which limits its applicability enormously, [1–3]. To cope with many drawbacks due to model and state-inferred uncertainties, the soft computing and machine learning techniques have been explored, and frequently used.
Object manipulation with curvature is achieved principally through thumb and index fingers that ables the object rotation, wherein index fingertip rolls while the thumb finger acts as the rolling surface for the object. However, notice that to get a satisfactory manipulation, the central nervous system (CNS) should processed information from the skin, muscles, and tendons, who play a crucial sensory-motor role. That is, the object rotation can be carried out using only the perceptual information even if the object is occluded. In this paper, we reproduce this difficult manipulation task using robotic fingers with hemispherical soft tips for a constrained curved object. The difficulty stems from the fact that we assume object angle is not measured, a common situation for we humans but hard to synthesizing for robots. Under this assumption, a novel regulator is proposed where the object angle is estimated by a recurrent echo state (neural) network (ESN), which has not been explored in the literature for this advanced task.
The artificial recurrent neural networks (ARNNs), unlike feedforward neural networks, have feedback connections to influence the output, for a more realistic brain analogy, given that the processing elements are interconnected to propagate inputs throughout the network by activation functions. In this sense, echo state networks (ESNs) are a powerful yet simple paradigm for implementing complex ARNNs [4–13]. As soon as this paradigm was discovered, many variants were explored and its capacity assessed, [14–20]. In this work, an alternative training of the ESN output layer is proposed by using (smooth) integral sliding mode control that guarantees finite-time convergence of the learning error, leading to finite-time learning of ESN.
The sliding mode control was developed for control applications [21] and later ported to the neural network field. However its contribution as the driving attractor that sets weights convergence rate has been overlooked. In this regard, sliding mode attractor produces training algorithms that quickly converge, and since the extended error, or sliding surface, also shapes the objective function, there have been proposed for discrete-time and continuous-time systems, [22–30]. When smooth controllers are used, quasi-sliding modes induce stability only, as shown in these works. However, few approaches prove strictly convergence in finite time at the expense of suffering from chattering, which excites residual dynamics, [31–33]. In this paper, an integral sliding surface to lead convergence of the ESN in a finite time is proposed, without chattering. Its output computes the necessary tangent force to roll the object a given angle, even without angle measurement.
Skillful manipulation is based, traditionally, on the simultaneous force-position control based on frictionless (infinitesimal) point contact, where neither rolling nor sliding is possible, due to contact occurs at a scalar point, [34]. It simplifies, apparently, the approach at the expense of enormous limitations for dexterous manipulation, [35–37], because purposely the holonomic constraint that arises at point contact not either models tangential force, essential for rolling an object. In addition, approaches at the actuator level, [38], do not establish a compliant contact to rigid environment due to actively control the apparent impedance of actuation.
In contrast, recent control schemes for manipulation of planar objects [39], have studied different contact models using soft tip wherein area contact arises, [40, 44], leading to more skill in manipulation. Also, a deformable soft tip dissipates impulsive contact forces that allows stable transition from free and constrained motion regimes for safe interaction, [42–46]. The significant advantage is also that the hemispherical shape of the tip induces the rolling at contact, which leads to repositioning the contact point by the rolling motion, without losing interaction. However, there remains to solve how much tangent force is necessary for a given desired rolling.
Our proposal
The control design is built upon the intricate relationship between the normal force subspace, arises along the maximum radial deformation, and the orthogonal velocity subspace, exactly wherein tangent force evolves. This fundamental observation leads to consider that to manipulate a circular object by a robotic finger with soft-tip, the ESN must be capable of outputting the necessary rolling motion under the following conditions: the smaller (larger) orientation error, the smaller (larger) rolling motion is needed, consequently the smaller(larger) tangent force is required. However, since there does not exists a direct relationship that models such behavior, the challenge is to design a ESN that quickly provides that, noticing that we cannot use controllers developed for rigid point contact because no explicit model of tangent force arises. To combine the stable time-invariant linear systems of the ESN architecture as a stable filter module, where the string of integrators is equivalent to the pure delay element, its reservoir is designed taking the states as inputs to the read-out network. Thus, the sliding mode-based learning in the readout network stands for a complementary tool to control or approximate arbitrary dynamical systems, similarly to [47–49], but never explored for complex robotic tasks. In this way, a regulator that yields local asymptotic convergence is proposed, and simulations results show the performance of the closed-loop system.
Organization
This paper is organized as follows. Section 2 introduces the kinematics and dynamics relationships of a constrained object, and Section 3 shows the general structure of ESN and its learning process in the adaptive readout network based on sliding mode attractors. In Section 4 a controller is proposed without any sensing of contact forces, deformation nor contact area, with stability analysis. Simulation results are presented in Section 5 to illustrate the numerical performance under various operational conditions, finally concluding remarks are addressed in Section 6.
Robotic Finger with Deformable Fingertip
Kinematics
Consider a three degree of freedom (DOF) robotic finger with a hemispherical, and soft, tip in contact to a circular constrained rigid object, as depicted in Fig. 1. Let Σ r be the fixed inertial frame, Σ b is the center position of the base of the deformable fingertip, and Σ 0 is the object center of mass (CoM) that coincides with its rotational axis. Let q i and l i be the generalized positions of the robotic finger and the link length i, respectively for i = 1, 2, 3. Finally, r > 0 stands for the fingertip radius with center at Σ b , R > 0 is the radii of the circular object while θ is the object angle measured with respect to the usual right hand side convention, for positive angular displacement.
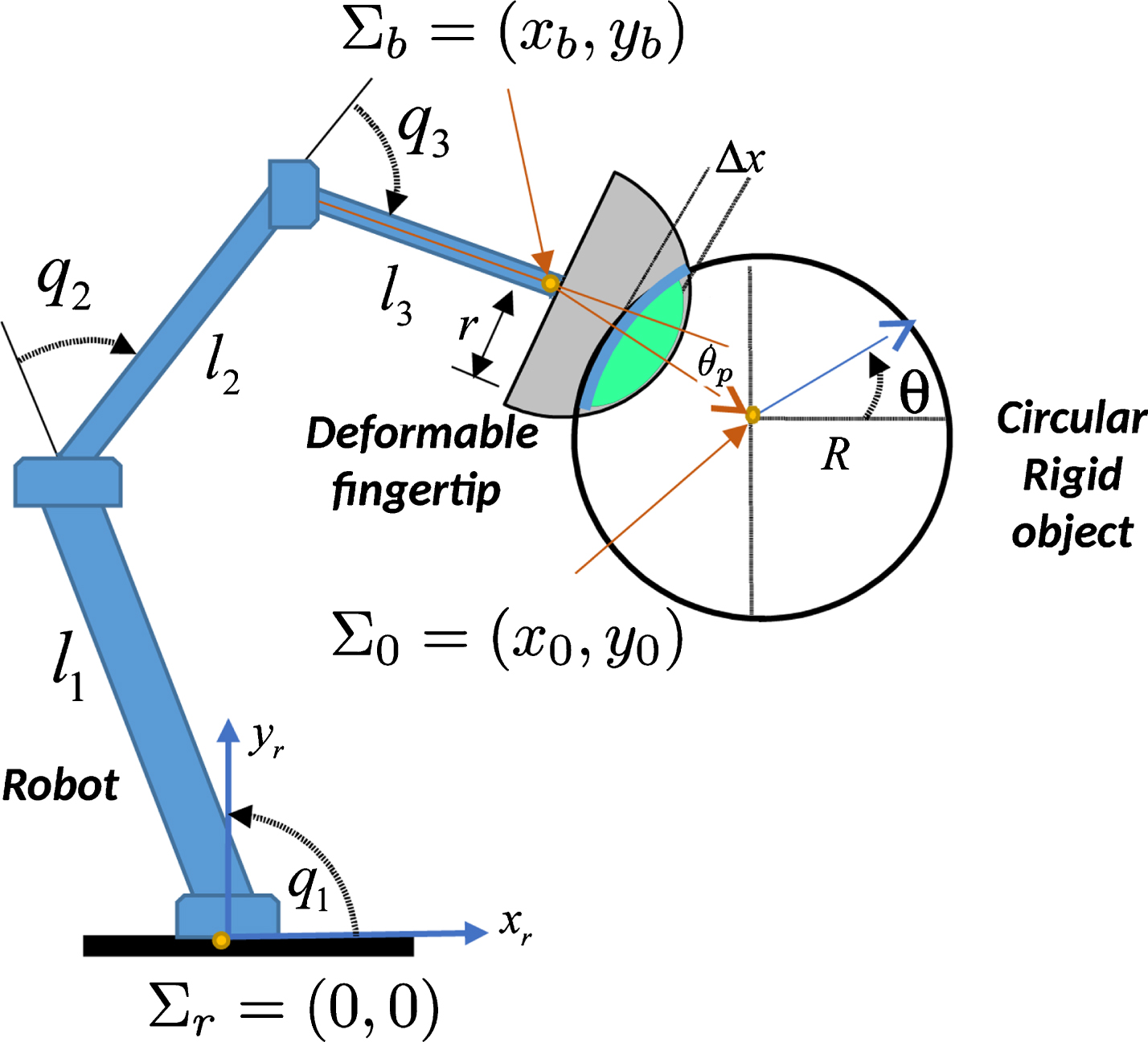
Robotic finger with a soft tip and circular object pivoting around Σ 0.
A contact area when a soft fingertip establishes contact with circular object, whose deformation varies according to the applied force. Due to maximal force arises at the point of maximum radial deformation Δx, [44, 50], then Δx can be computed by localizing the center of the contact area with respect to the frame Σ 0,

Kinematic relations between fingertip and the circular object.
Clearly the hemispherical shape of the fingertip allows rolling which implies simultaneous translation of Σ
b
, a characteristic that is is considered a robotic ability. In this case, ee Fig. 1, the 2D contact area is depicted by the light blue arc length1. Assuming initial contact of fingertip with the object, Δx > 0, thus the velocity rolling constraint becomes, [44],
Using the unconstrained Lagrangian defined as
System (4)–(5) can be written in a compact vector-matrix notation as follows
P1: Antisymmetric property. Matrix
P2: Passivity. Considering the dot product of output
P3: Equilibrium of force. Notice that the monotonously increasing f = kΔx 2 implies that given a desired constant force f
d
> 0 corresponds necessarily to
The ESN is a type of ARNN that consist of: (i) an artificial recurrent neural network with random and not trainable weights, that acts as a reservoir, on which external excitations impinge and produce a broad class of dynamical echoes, and (ii) the output layer produces a linear combination of those echoes. This architecture can be seen as a combination of a large and fixed ARNN, and a simple-to-train linear output stage, which allows to produce a broad and rich dynamics while keeping the training requirements to a minimum [52, 53]. A typical architecture of ESN is composed of three layers: the input layer and hidden layer called a dynamical reservoir, and output layer known as adaptive readout network, see Fig. 3. As is pointed in [6], let us assume that reservoir of the ESN is based on continuous-time dynamics of leaky-integrator, that is
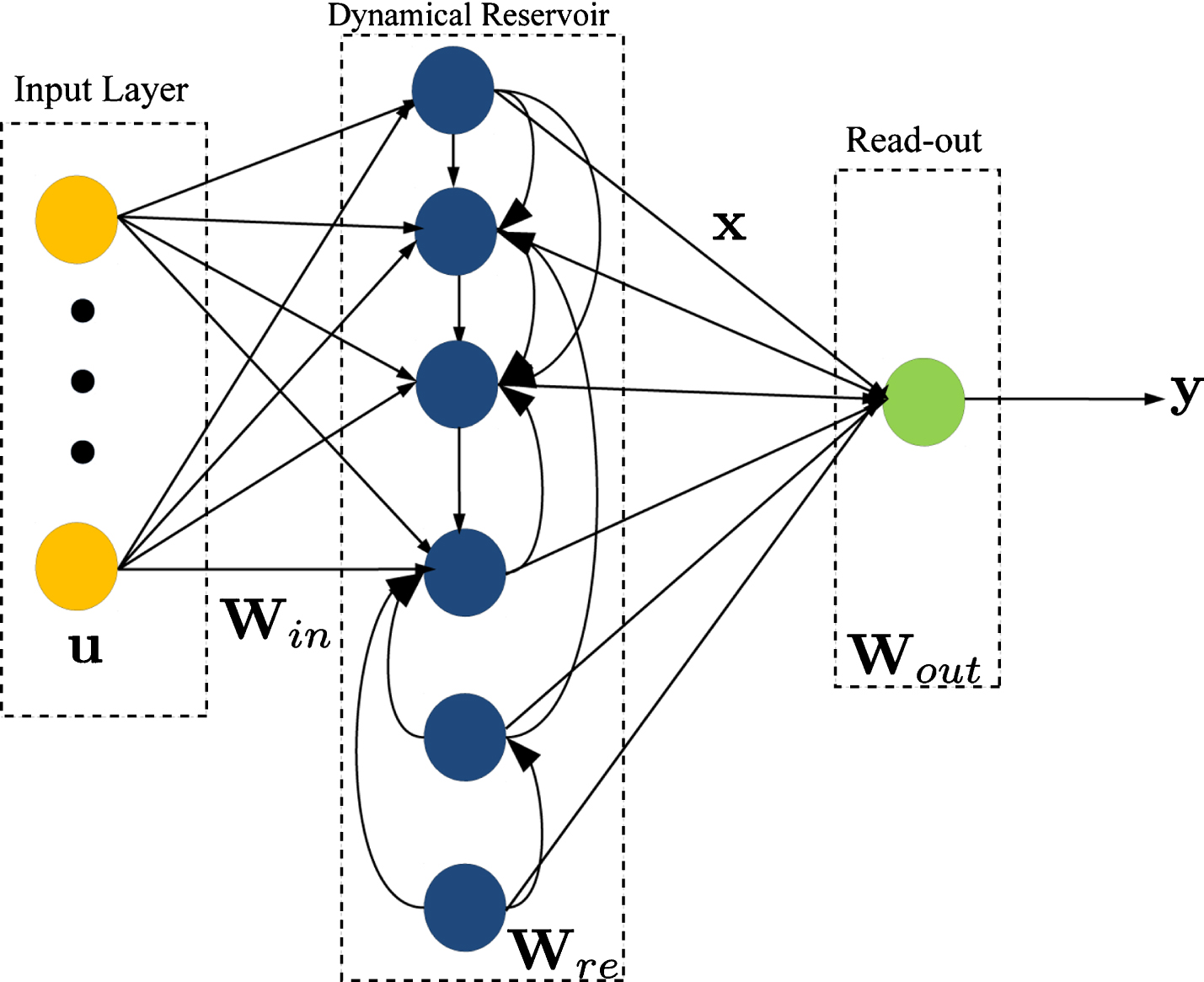
General scheme of an echo state network (ESN).
Motivated by the seminal work of [32], we propose that an adaptive readout network is an adaline-based neural network that preserves the stability of an universal approximator of smooth functions in finite time. For adaptive readout network is assumed, without loss of generality, that input and output signal vectors are bounded time-varying, i.e. ∥
Using the continuous-time sliding mode control concepts [21, 59], we propose an extended learning error by adding a time-varying sliding surface that integrates the sign of the error over time, and introduces stronger error corrections that counterweight the chattering noise. That is, time-varying sliding surface is defined as
All the previous definitions allow us to state the following proposition:
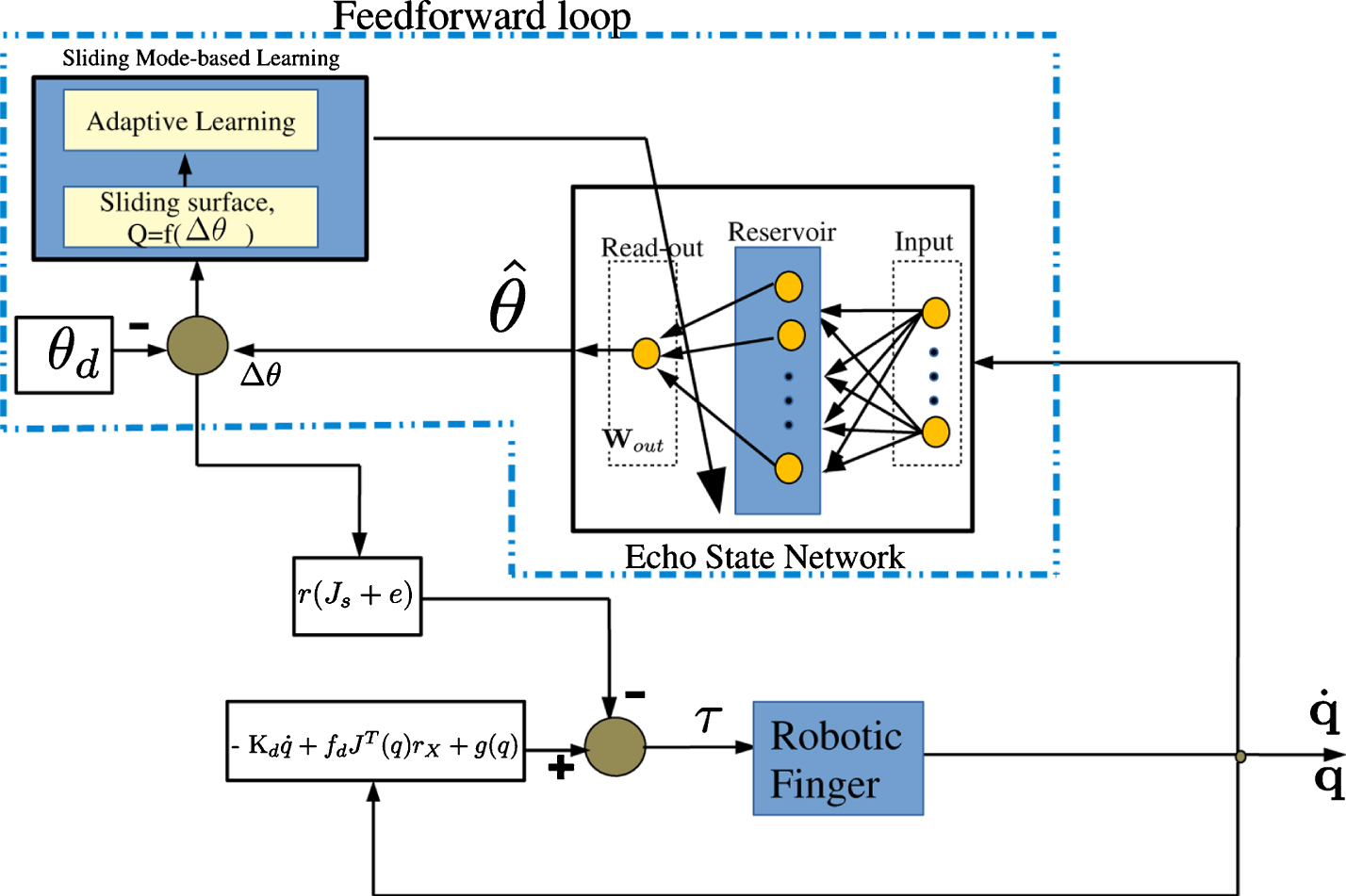
Force-orientation controller
We aim at controlling the orientation of the circular object, under the assumption that object angle is not available. To that end, let the following control law be, see Fig. 5,
i) orientation error Δθ = θ - θ
d
, where θ
d
is the desired object orientation and θ the object angle, which clearly depends on the applied tangential force λ, then it seems reasonable to argue that the desired tangential force be
ii)
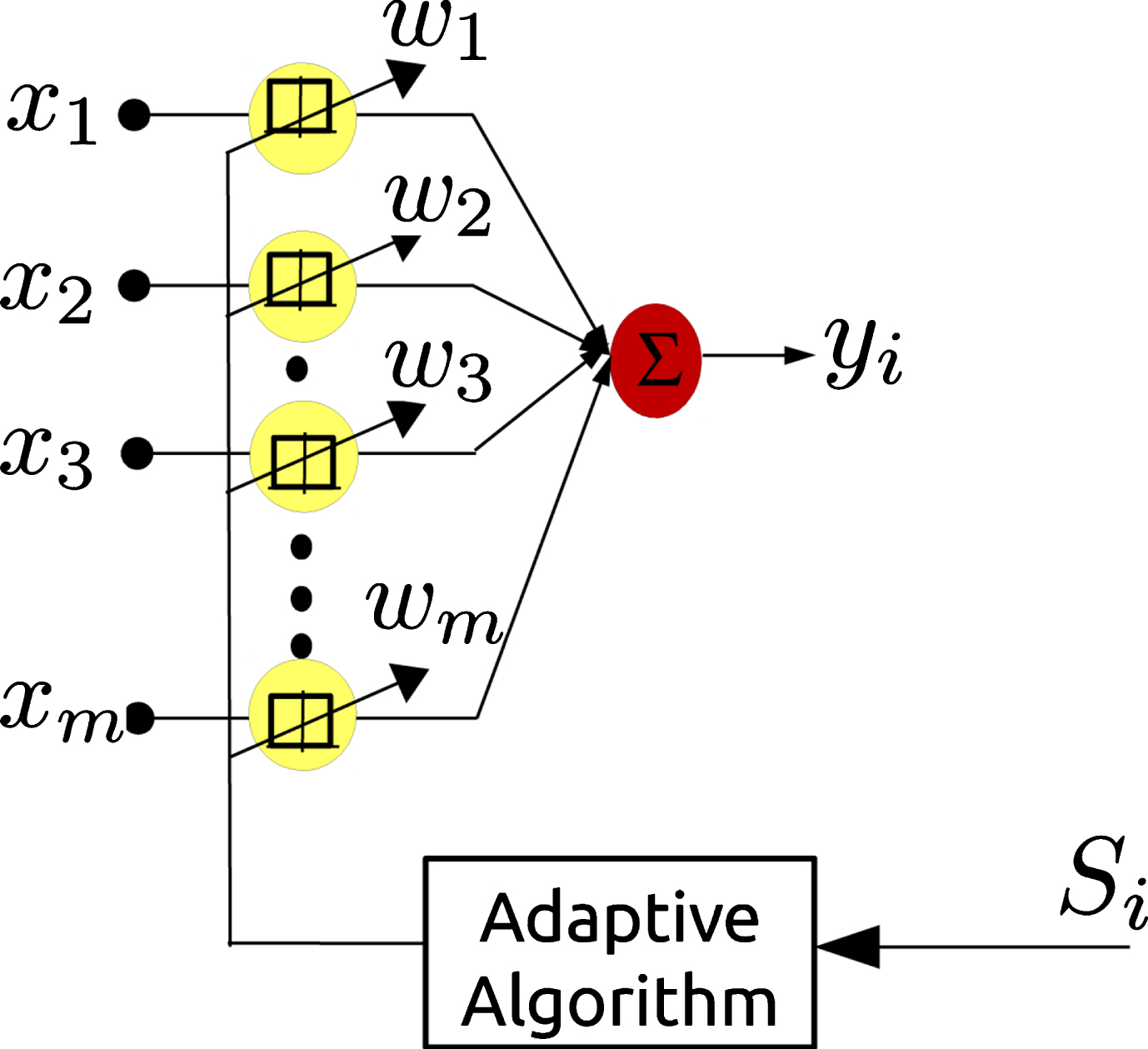
Adaptive readout network for the output-i, i = 1 … l.
Block diagram of the closed-loop system.
Physical parameters of the robot
Consider a circular object pivoting at its axis, see Fig. 1 whose task is convergece to a constant θ d . A simulator is programmed using a stiff numerical solver with a Constrained Stabilization Method (CSM) [60]. The physical parameters of the robot manipulator are shown in Table I, where l i , m i and I i are the length, mass and the inertia moment of each link, respectively. Additionally, the mass, moment of inertia and radius of the object are defined as M = 0.1 [Kg], I = 5.67 × 10-6 [kgm 2] and R = 0.03 [m], respectively. Finally, k = 500 [N/m 2] and r = 0.02 [m] is the stiffness of the material and the radius of the soft fingertip, respectively.
Simulation conditions
The task goal is to roll the constrained circular object to a desired angle θ
d
by applying a desired force f
d
with a 3 degrees of freedom robotic fingertip. Consider the soft-fingertip in stable contact to the object, that is, Δx (0) >0impliesf (0) >0 and consistent as a DAE-2 formulation at t = t 0. Finger state is measurable but not object angle, which is estimated as
The robot start motionless, with an initial angular position of Simulation 1: θ
d
= -4.87 [rad], f
d
= 2 [N], and k
N
= 0.1 Simulation 2: θ
d
= 4.8744 [rad], f
d
= 1.5 [N], diag (K
d
) =2.0 * I 3×3 k 1 = 1.7 and k
N
= 0.1
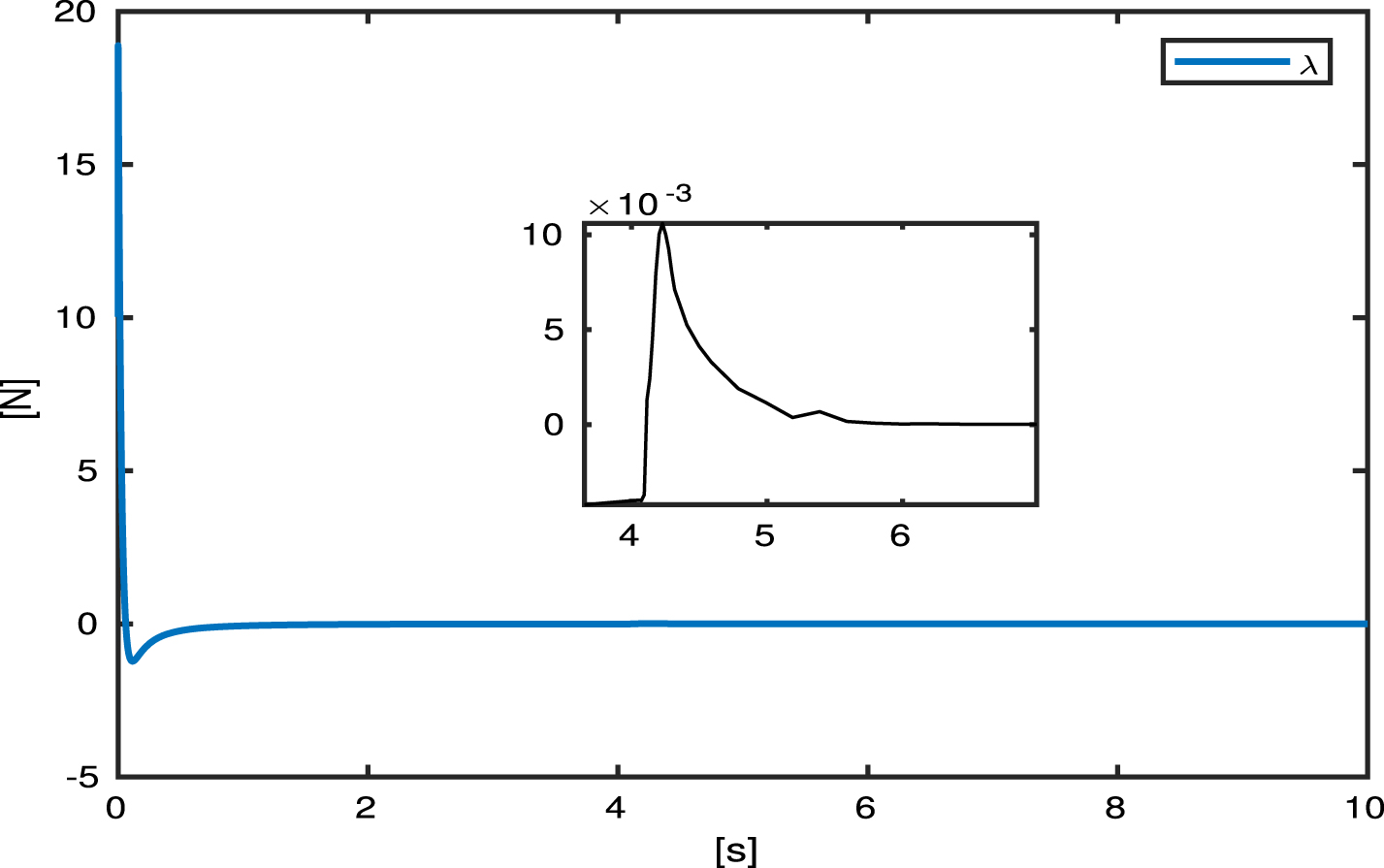
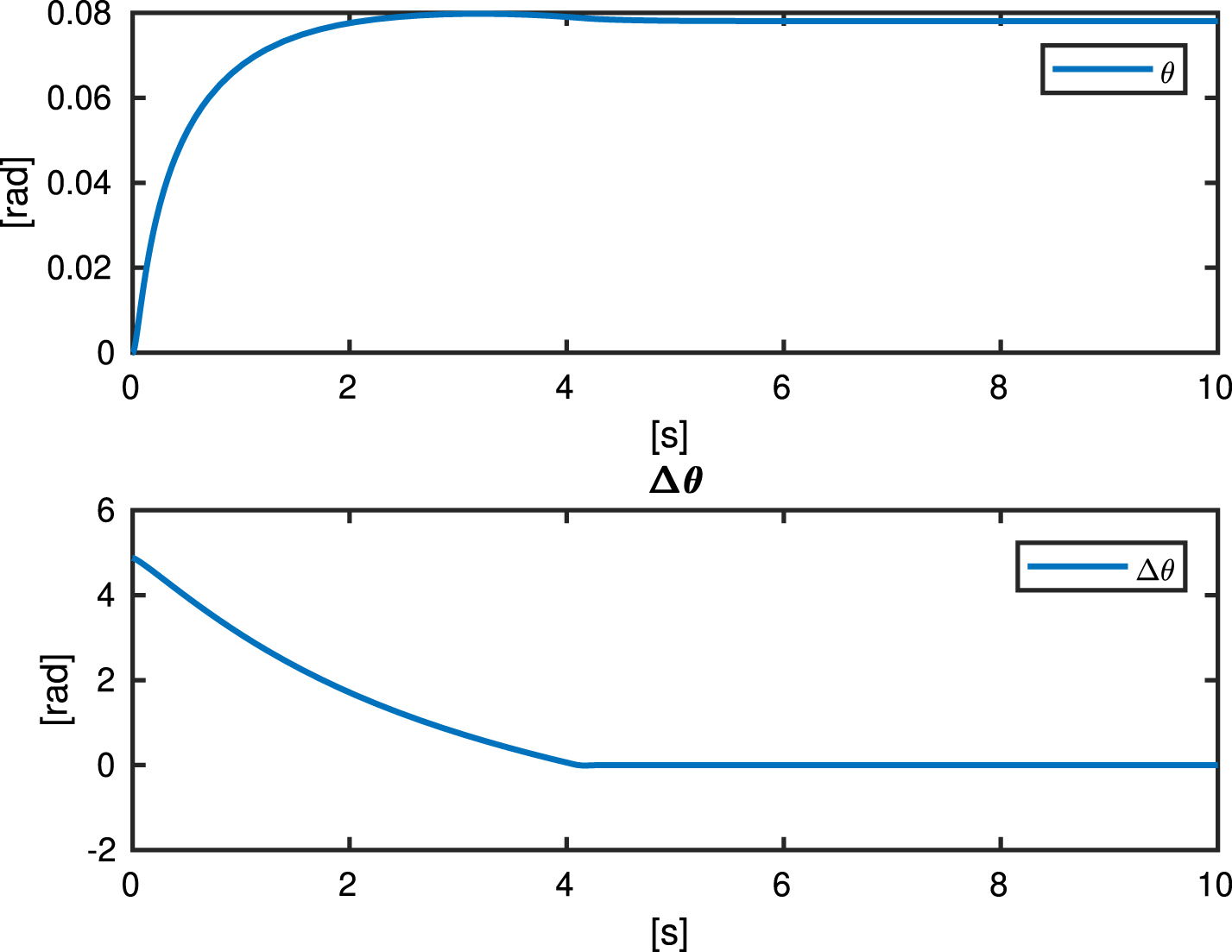
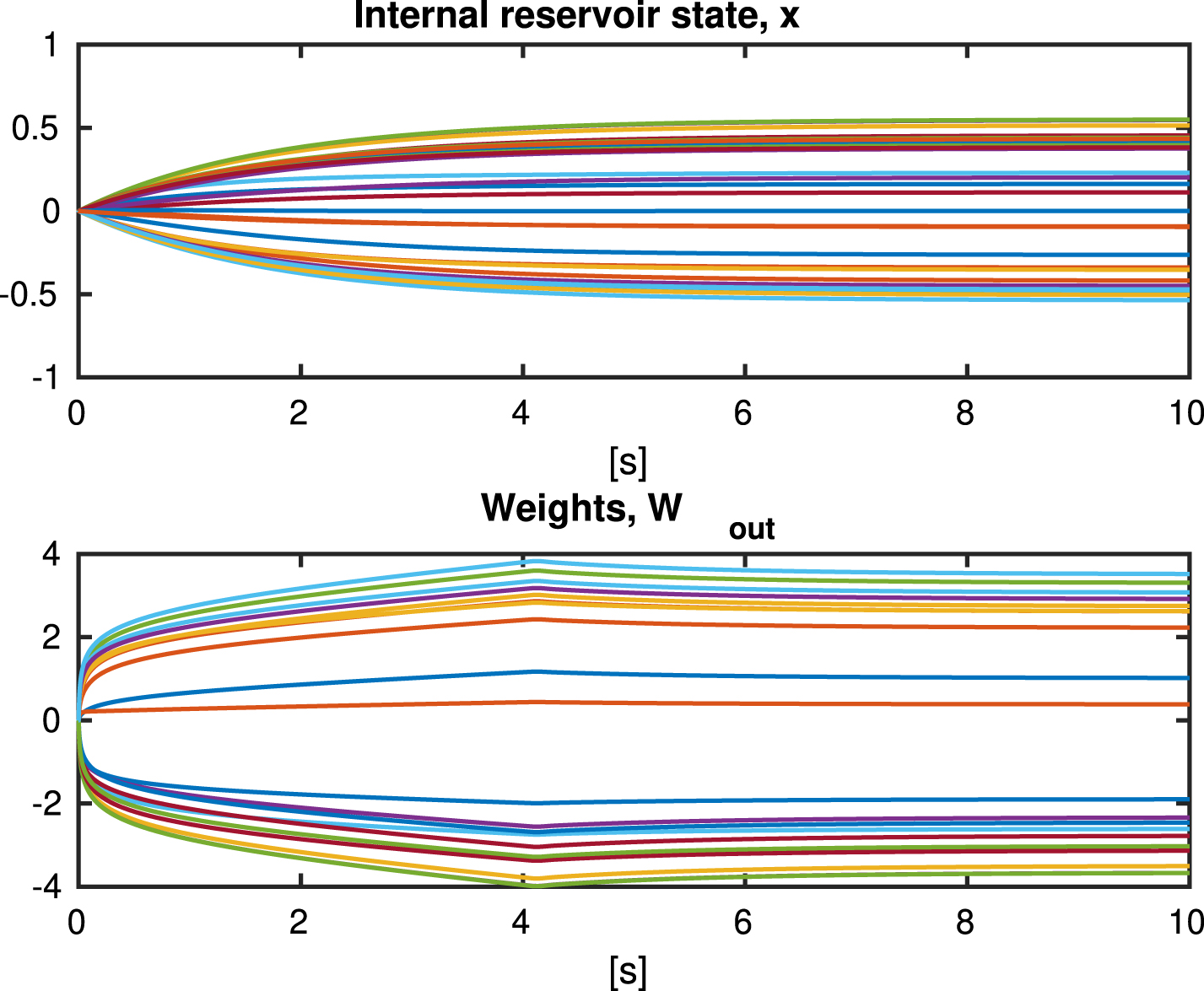
Simulation 1: it is shows that contact force reaches the desired force in approximately 6 [s], Fig. 6. At the same time, in Fig. 7 is shown the tangential force behavior which apparently converge to zero rapidly. However, zooming in on the plot between 5.5 - 8.3 [s], we can notice that although the λ is small and very close to zero, the convergence to zero is reached in 8 [s] approximately. This means that λ trajectory is very close to the sliding surface, however, until the convergence of the contact force is guaranteed, the sliding condition is satisfied and Δθ → 0. This can be verified in Fig. 8 where the convergence of Δθ is reached in approximately 6 [s] while the object angle reaches the value of -0.04 [rad]. In Fig. 9 is shown how are driving the readout network weights by the sliding mode control, that is, once the sliding mode condition is satisfied the weights remain bounded on the sliding surface. Finally, in Fig. 10 is shown the rolling motion contribution to move the object through tangential force, changing position of x b and y b , while the contact force guarantees to grasp firmly the object during the task.

Radial deformation of the soft tip and contact force convergence to the desired value.
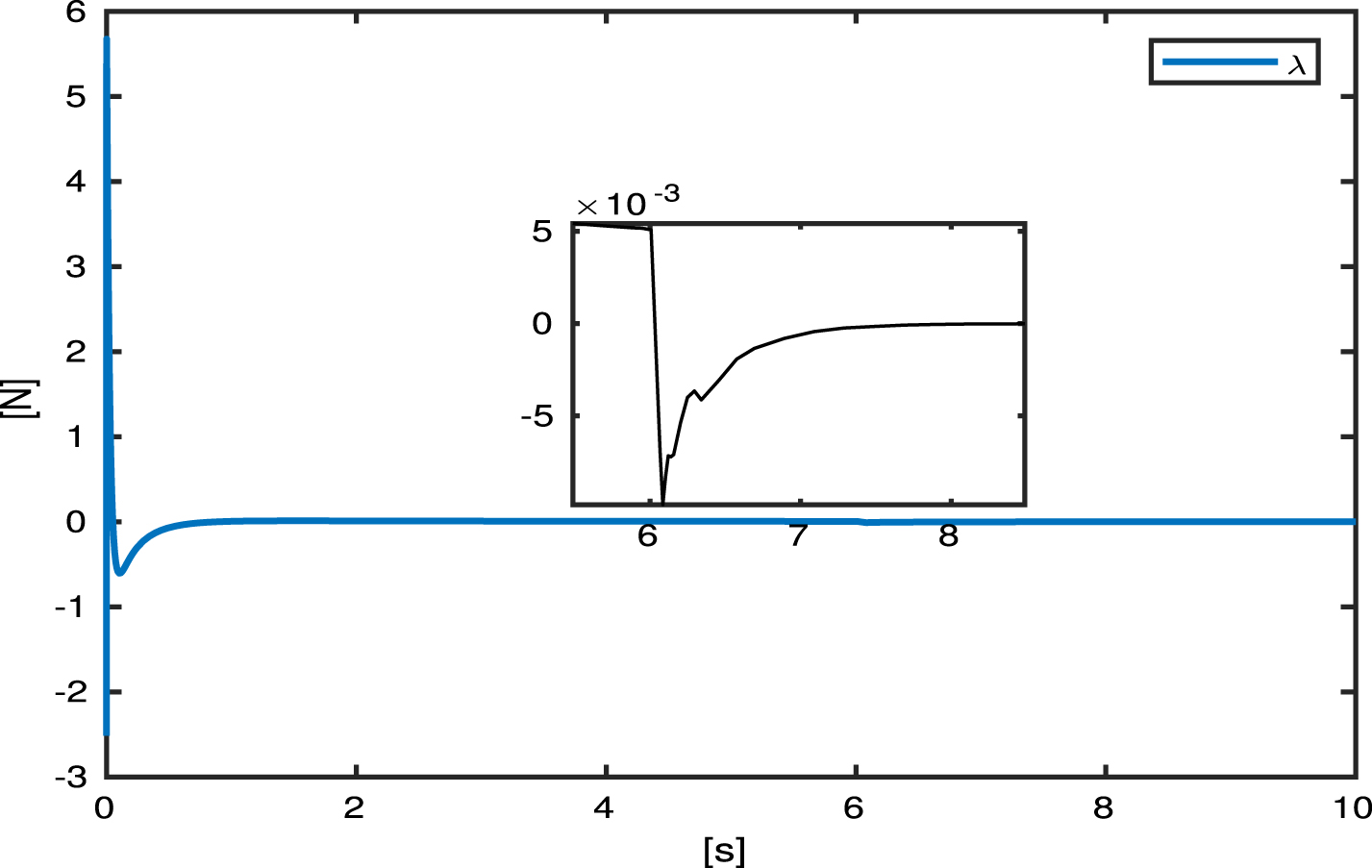
Tangential force performance.
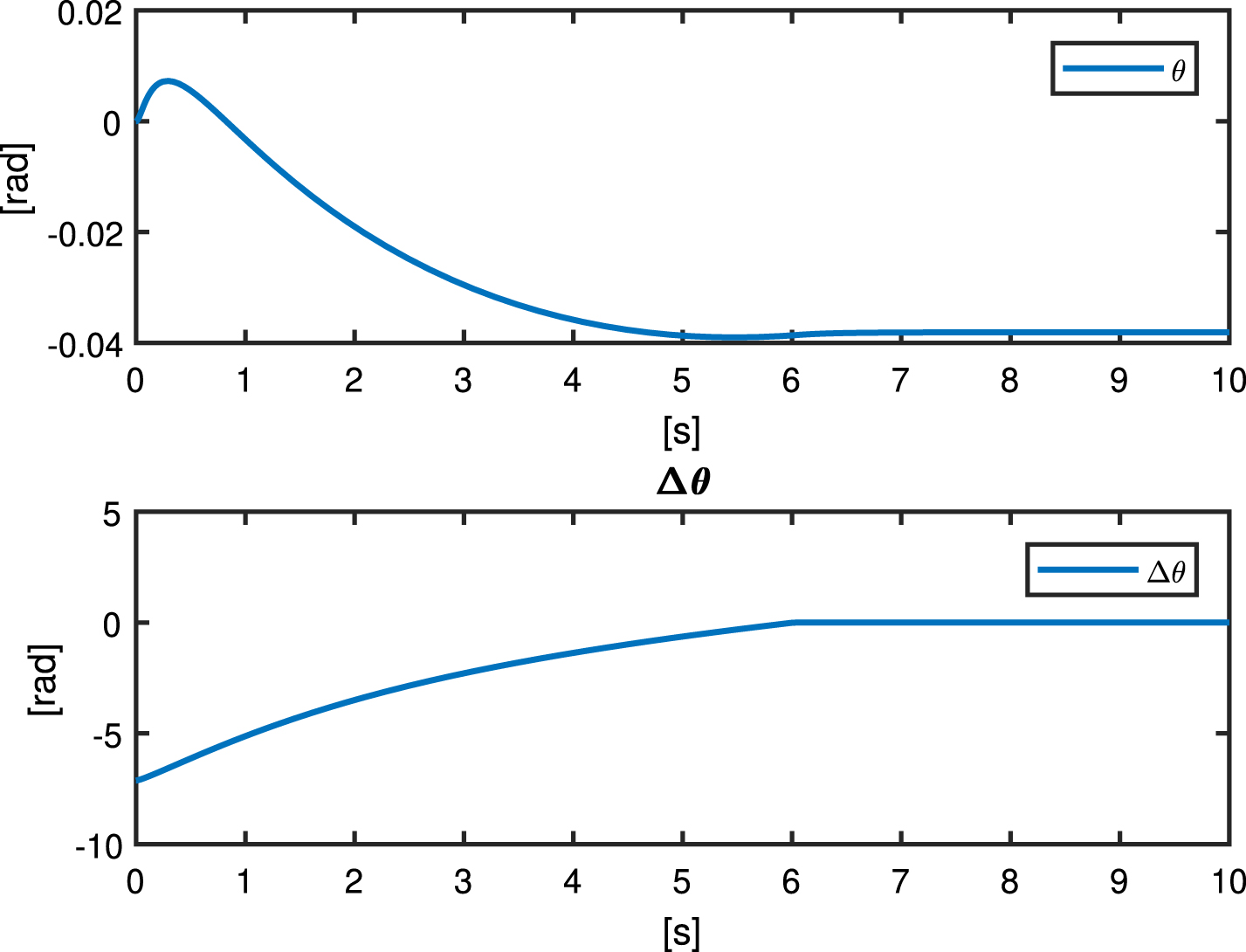
Convergence of pose error Δθ, in intrisic relationship to desired tangential force.
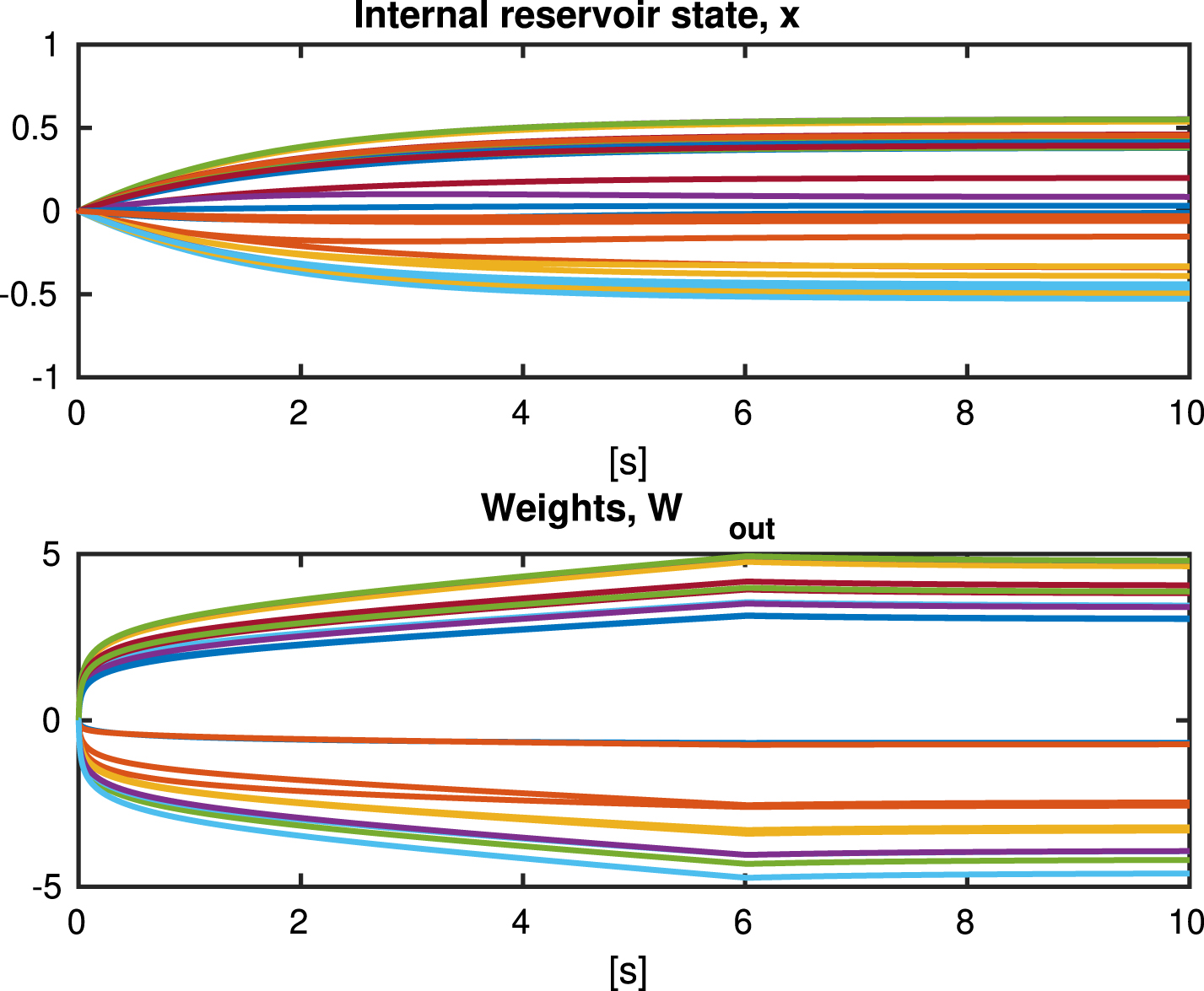
The internal reservoir states and weights of the readout network.
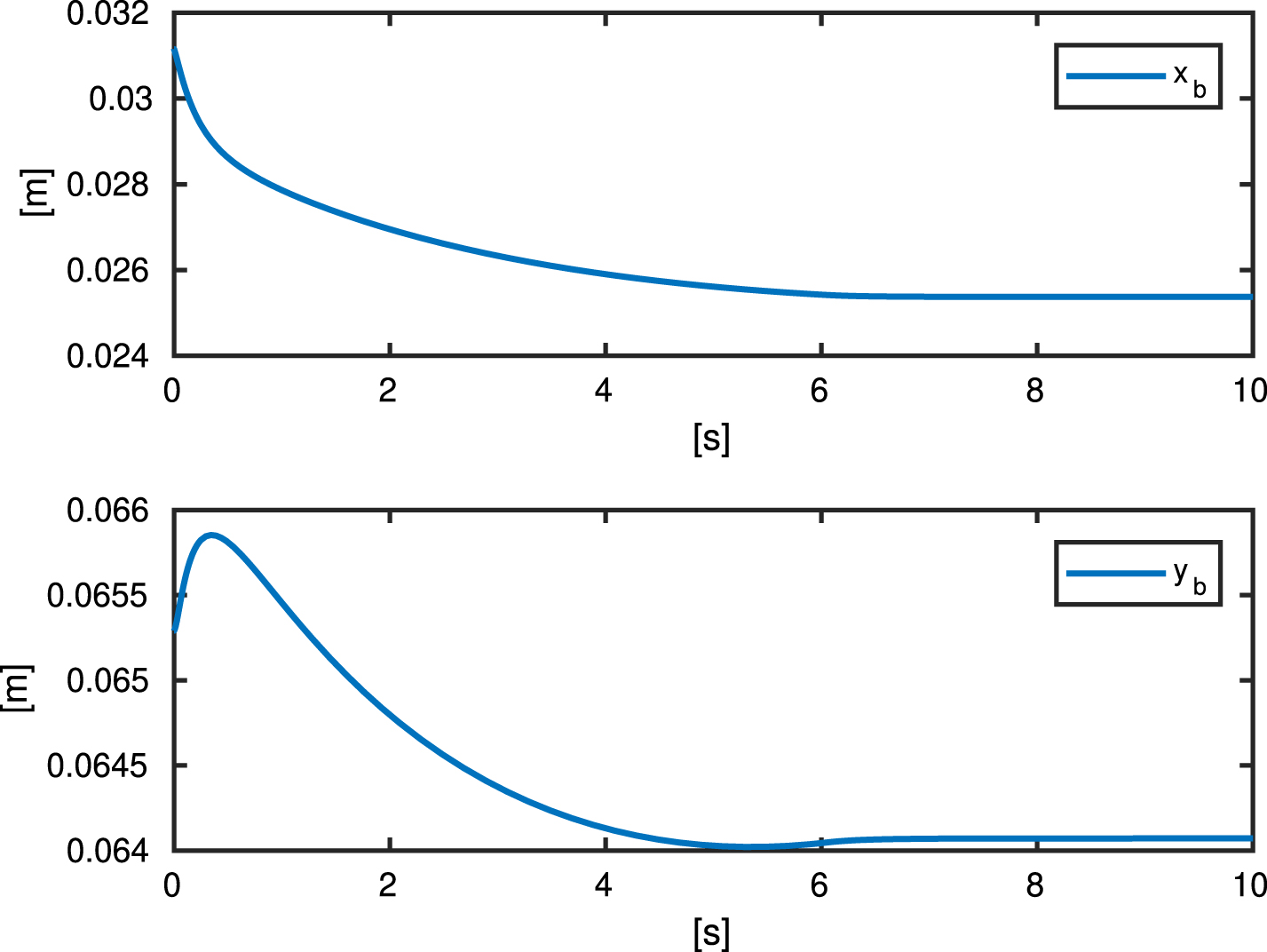
Simulation 1. Trajectories of the center position of the deformable soft fingertip during the task.
Simulation 2: See Figures 11–14. A little bit deformation with a smooth convergence to the desired force is observed in Fig. 11. As in previous simulation, the tangential force tends to the zero rapidly, however the sliding surface is reached in 5 [s], Fig. 12. At the same time that sliding mode condition is satisfied, the convergence of Δθ is guaranteed, see Fig. 12. Finally, the performance of the internal weights and the readout network is presented in Fig. 14.

Simulation 2. Deformation of the soft tip and the contact force.
Simulation 2. Performance of the tangential force.
Simulation 2. Smooth convergence to the desired object angle, θ d , once the sliding mode condition is satisfied.
Simulation 2. The internal reservoir states and weights of the readout network.
Comparative Performance: Figures 15–17 shows the comparison of the proposed approach with the traditional learning algorithm gradient descent. The convergence of Δθ for both algorithms is shown in Fig. 15. As we can see, the performance of pose error with the proposed approach is more smooth and converge in a finite time. To show that once the learning error reaches the sliding surface Q = 0 remain in it, Fig. 16 show how λ → λ d = Δθ as is expected by the proposed algorithm while by gradient descent the convergence to zero is not guaranteed. And last but not least, in Fig. 17 we can notice the bounded-weights in adaptive readout network as it is expected by the proof, part 1, of Proposition 1. On the other hand, since gradient descent algorithm cannot guaranteed the boundedness of weights globally, we can see that there appears a undesirable dead zone in the beginning signaling the well-known problems of local minima.
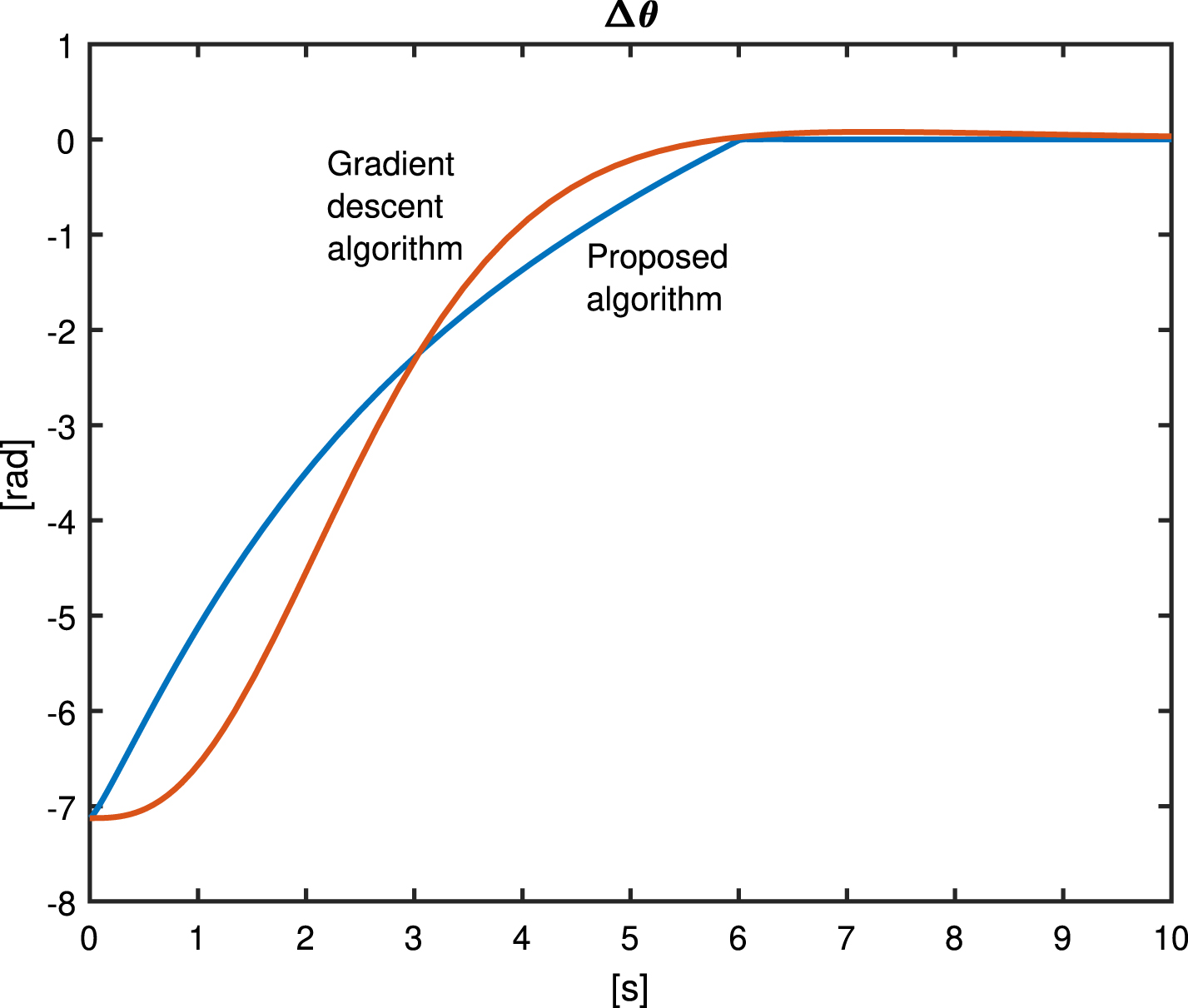
Comparative simulation: Performance of the pose error, Δθ.

Comparative convergence: Tangential force convergence (zooming of last seconds is shown).

Comparative performance: Weights in the adaptive readout network.
This work presents the key contribution of ESN for angle manipulation of circular object through a robotic finger with hemispherical soft tip subject to unmeasurable object angle measurement. Stability conditions guarantee the local convergence of the closed-loop system based on online adaptive learning of the ESN weights. Its structure and proposed learning, based on sliding mode control, has been studied and highlighted the usefulness in this complex robotic problem by exploiting precise, smooth and fast online weight adaptation to estimate the intrinsic relationship of the nonlinear under-actuated robotic task.