
Abstract
Vehicular Ad Hoc Networks (VANETs) is the most growing research area in wireless communication and has been gaining significant attention over recent years due to its role in designing intelligent transportation systems. Wireless multi-hop forwarding in VANETs is challenging since the data has to be relayed as soon as possible through the intermediate vehicles from the source to destination. This paper proposes a modified fuzzy-based greedy routing protocol (MFGR) which is an enhanced version of fuzzy logic-based greedy routing protocol (FLGR). Our proposed protocol applies fuzzy logic for the selection of the next greedy forwarder to forward the data reliably towards the destination. Five parameters, namely distance, direction, speed, position, and trust have been used to evaluate the node’s stability using fuzzy logic. The simulation results demonstrate that the proposed MFGR scheme can achieve the best performance in terms of the highest packet delivery ratio (PDR) and minimizes the average number of hops among all protocols.
Introduction
Due to various factors such as the increase in real incomes, business requirements and changes in population density, there has been a concomitant increase in the demand for vehicles. However, the increasing vehicle count in cities and highways came with challenges such as congestion, traffic, accidents, etc. Furthermore, with the world becoming increasingly connected, vehicles have become sophisticated pieces of machinery. Vehicles are equipped with GPS, entertainment services and safety technologies to make the journey for passengers more comfortable. VANETs are a network technology that has emerged to overcome the challenges that passengers face while traveling on roads daily. They are the building blocks of the intelligent transport system (ITS) that addresses issues associated with traffic management [1].
Each vehicle in a VANET is a mobile node with a GPS device attached to it which keeps track of its own location information and all other vehicles within the communication range. Since VANETs are very mobile they are regarded as a dynamic network topology. However, routing becomes a key issue when dealing with nodes highly mobile nodes. Communication in VANETs can take place between vehicles and vehicles or vehicles and infrastructure. The former is termed as vehicle-to-vehicle (V2V) communication whilst the latter is called vehicle-to-infrastructure (V2I). Depending on the form of communication, the application of VANETs differs from being safety-oriented to commercial oriented. Some of the applications include Electronic Emergency brake light (EEBL), media downloading, and stationary vehicle warning. Since routing is considered as an important problem with regard to VANETs, a multi-hop routing algorithm is presented.
The rest of this paper is organized as follows. Section 2 presents the related work and motivation behind our proposed work. Section 3 presents our proposed fuzzy based routing algorithm. Section 4 presents performance evaluation, results and discussion. Section 5 presents conclusion and future work.
Related work and motivation
The purpose of this study is to ensure that data delivery in V2V communication is efficient and reliable. In vehicular networks, information may travel through many nodes that lie between the nodes. All neighboring nodes receive the broadcast information from the originator. The message is further retransmitted until it finally reaches the desired node. However, this approach may lead to redundant broadcasts in a dense network which can hamper the efficiency with which data is delivered throughout the network. The sender-oriented protocol has been adopted to reduce redundant broadcasts. This means that the sender gets to decide which node gets to retransmit the message. Certain works focus on problems such as unnecessary resource utilization and energy consumption in VANETs. Arif et al [21] proposed a technique to restrict the amount of information sent to the forwarder nodes using an Artificial Bee Colony (ABC) optimization algorithm. However, routing remains the most challenging task in VANETs, considering the mobility of vehicles and unstable links. An incorrect selection of the relay node will lead to packet loss which reduces the performance of the VANET. Therefore we have employed fuzzy logic in our algorithm to approximately decide the next best neighbor node. In certain situations, uncertainty may arise and the exact location of the vehicles may not be determined. For instance, selection parameters for the next-best node may return conflicting values in places such as tunnels. Thus fuzzy logic concepts are used to handle imprecise, inaccurate and inadequate information. Furthermore, the decision on the next hop neighbor node is mathematically modeled for successful data delivery.
The algorithm needs to be such that next-hop neighbor selection is handled efficiently. To achieve this, a fraction of the total pool of next neighbor nodes available to relay the data packets needs to be selected. Thus, a route decision algorithm that uses fuzzy logic is described. It is used in VANETs and helps in selecting a subset of nodes. In this section, the fcar protocol is outlined. Fcar [22] makes routing decisions by adopting fuzzy control methods with the help of routing parameters, namely path duration and fraction of nodes travelling in same direction. To make better packet forwarding decisions the protocol needs to integrate location assisted routing and fuzzy logic. The fuzzy decision-making system takes as an input the direction and distance.
Metrics such as the mobility of vehicles, the strength of signal and distance between the vehicles are considered for choosing the next-hop node. In comparison with existing methods, the algorithm is more reliable as it selects only a fraction of the neighboring vehicle nodes. In case the relay node malfunctions a retransmission mechanism is used to retransmit a packet. The mechanism employed is lightweight. The main difference between our work and the rest is that a gaussian membership function is used to obtain fuzzy values from the input data. Neighbor nodes are evaluated based on the following metrics: speed, direction, position, distance and trust degree of the neighbor node. The algorithm is evaluated with the mathematical model and with work in [3].
A Cost Function based Routing (CFR) [18], uses a mathematical cost function to select the best forwarder. Metrics such as the position, direction, distance and velocity of the neighbor node concerning the source node are used to formulate the cost function. This cost function is essential in routing the data packets efficiently. When working on practical problems it is important to optimize the parameters to improve the accuracy of our results. The proposed cost function takes as input four parameters that need to be optimized such that the best next-hop neighbor node is selected. An optimal node is one that has attributes such as high velocity, less distance, and angle, making more progress to the destination. For each of the neighbor nodes, the cost function is applied. The highest weighted node is selected as the forwarder. The cost function is expressed algorithmically as given in [18]. The process is repeated until the message reaches the destination. The drawback of this method is that the cost function can either be maximized or minimized, hence we cannot say for sure if the selected node is the optimal one or not. However, we have proposed another approach in the paper as well that manages to overcome this drawback.
Considering the above mentioned issues, this paper proposes a Modified Fuzzy-Based Greedy Routing (MFGR) Protocol for VANETs with the following contributions: Designed a Fuzzy-based stability aware routing protocol, which is an improvement over thefuzzy logic-based greedy routing algorithm (FLGR) [18] for selecting the stable next hop forwarder. The chance of selecting the next hop forwarder is computed suing the fuzzy input variables, namely Distance (D
t
), Direction (D
r
), Speed (S
d
), Position (P
i
), Trust (T
r
). The performance of the proposed protocol is measured by evaluating in terms of Average Packet Delivery ratio (PDR) and Average Hop Count.
Fuzzy-based stability aware routing
Several fuzzy logic-based algorithms have been proposed such as in [4, 5], nevertheless, they are not representative of situations that occur in the real world. This paper aims to assess the algorithm against realistic scenarios. To establish V2V communication, each vehicle contains a wireless communication device and GPS, which is used to get the exact vehicle location. The nodes move in the same direction as the target vehicle; the algorithm denotes the transmission range of each vehicle by R. Each vehicle has at least one neighbor and the speed of the vehicles range from 0 to 100 km/h. A neighbor node is considered to be a vehicle that lies within the transmission range, R, of the source node (vehicle) or the node containing the packet of data to be forwarded. To get the neighbor nodes’ location, the source node will broadcast a series of HELLO packets. Neighbor nodes receiving these packets will reply by sending HELLO packets that contain key information such as the node’s position etc. In this way, a node can get the position of its neighbor nodes.
The Modified Fuzzy-Based Greedy Routing Protocol (MFGR) broadcasts the data to only one of the chosen node among a set of neighbor nodes, instead of every node. The objective of MFGR is to select the most lucrative node for forwarding the message. MFGR makes use of fuzzy logic to improve the forwarder selection process. The reasoning style of Fuzzy logic is similar to that of humans. There are 3 stages involved in any system that employs fuzzy logic- input, process, and output. The first step involves converting the input into a fuzzy set by utilizing membership functions, fuzzy linguistic terms, and fuzzy linguistic variables. This step is also termed as fuzzification. Unlike other variables, linguistic variables use words instead of numbers as their values. After fuzzification, the input data is converted to an equivalent fuzzy value. The process stage involves the use of fuzzy set operations and fuzzy rules. Every fuzzy system has a rule base and a fuzzy value is matched to a set of fuzzy rules which are simple IF-THEN statements. The last step involves converting the output from the previous step to a crisp value, which is called defuzzification and several different methods can be used to achieve this- center of gravity, adaptive integration, fuzzy mean, etc.
The main objective of this research is to relay data efficiently between vehicles. The originator node will directly transmit the data to the destination as long as the node lies inside its range of communication. If the destination node is not within the coverage of the current forwarding node, the data packet is relayed to a set of neighbor nodes. The selection of neighbor nodes among a set of candidate nodes is a challenging task, hence, to select an ideal next-hop a fuzzy inference system is designed. The 5 steps followed by the fuzzy system: Frame fuzzy rules to feed into the Fuzzy Inference System. Table 1 shows the few of the total 243if-then mapping rules. Perform fuzzification on each of five metrics, namely direction, position, speed, distance and trust degree with the help of the membership functions. A set of fuzzy values are obtained from the numerical values of the five metrics. The values obtained after fuzzification are fed into the rule base. In this step, the implication is employed and is applied to each of the fuzzy rules. The final step is defuzzification. The output distribution acquired from the previous step is converted to crisp value.
Fuzzy based inference rules
Fuzzy based inference rules
The node having the highest weight among the neighbour nodes will act as one of the relay between the source and the destination. These five steps are applied to each of the current forwarding nodes until the efficient routing path is discovered for transmitting the forwarded packets. Our proposed routing technique uses 5 important metrics to select the ideal next-hop neighbor node. Fuzzy logic uses the below metrics for intelligent forwarder selection.
(a) Distance
As represented in Fig. 1, the distance between two nodes, lying within the transmission radius R, is termed as the distance metric. The Euclidean distance formula, as given in Equation (1), is employed to calculate this value. Table 2 shows the range of fuzzy variables for distance metric.

Representation of Distance Metric.
Fuzzy variable ranges for distance
The coordinates of the source and destination are represented as (x1, y1) and (x2, y2) respectively.
The distance metric as illustrated in Fig. 2 shows the percentage of distance-based packet reception. The strength of the radio signal at a given distance may differ over a period of time due to interference from other objects and the mobile nature of the VANET environment. The Nakagami-m distribution model has been used to describe how the radio signals are transmitted in the network without any sort of interference [6, 7]. The variation of percentage of packet reception and distance is shown in Fig. 2. The percentage of packet reception between 2 nodes is 100% when the distance between the nodes is 0–150 m, however, these nodes are further away from the destination. Thus choosing these nodes as the next-hop would increase the number of intermediate nodes between the source and destination. Likewise, choosing nodes that are 200 to 250 m apart would result in packet loss as the percentage of reception of the data packet is less than 45%. Therefore the algorithm gives greater importance to the nodes that are about 150 to 200 m away from the source or current forwarding node. The packet reception lies between 87–99% as indicated in Fig. 2. In this way, we aim to minimize the hop count and maximize the packet delivery ratio.

Distance versus packet reception.
(b) Direction:
The angle formed by the neighbor node with the source node and the destination node gives the direction metric. A smaller angle means that there is a much greater probability of being closer to the target node [8]. Hence a greedy approach is followed. Table 3 shows the range of fuzzy variables for direction metric.
Fuzzy variable ranges for direction
As depicted in Fig. 3. Node A is chosen over node B as it makes a smaller angle with distance SD. The angle between SA and SD can be calculated using the formula [9] defined in Equation (2).
Representation of Direction Metric.
(c) Speed:
Speed also plays an important part in determining the best neighbor node to forward the data packet. Low, medium and high are the three fuzzy sets that the speed metric is classified into. A neighbor node moving at a higher speed would reach the destination faster, hence such a node must be chosen to increase the propagation of data packets. Table 4 shows the range of fuzzy variables for speed metric.
Fuzzy variable ranges for speed
(d) Position:
As illustrated in Fig. 4, the position metric displays how much headway a node has made. There are 3 linguistic variables to categorize this metric- near, intermediate and far. Table 5 shows the range of fuzzy variables for position metric. The position can be represented as a ratio as shown in the Equation (3) [18].
Representation of Position Metric.
Fuzzy variable ranges for position
(e) Trust Degree:
This parameter evaluates the trust degree of a node in the network. Trust degree refers to how reliable and trustworthy a particular node is in the network. Trust is established through either a direct or indirect interaction. The trust degree can be calculated using the formula shown in Equation (4).
Where
The formula for direct and indirect trust is mentioned in the Equation (5) and (6) respectively.
The direct trust is the ratio of the number of packets a node receives at time i and the number of packets sent at time i. The level of indirect trust is affected by the number of packets transmitted in the neighboring nodes. A node with a higher trust degree should be selected for further packet transmission. In addition, the trust degree values are updated using Equation (7) in each iteration.
δ is a weighting factor whose value lies between 0 and 1. A record table is used to store the trust degree values of each node.
MFGR applies Dijkstra algorithm [19, 20] to solve the shortest path routing problem. In a weighted graph, Dijkstra algorithm can be used to discover the shortest routing paths to any destination from a single source. As the objective of the routing problem is to find shortest path, it is considered as a minimization problem. Thus, maximizing or minimizing some function relative to some set, often representing a range of available choices to select from is called an optimization problem. Greedy algorithm solves an optimization problem in stages, i.e., by considering one input at a time and follows a predefined procedure to achieve an optimal solution. Thus, Dijkstra algorithm sets a procedure to reach the solution, i.e., the shortest path, and it can work in directed as well as undirected graphs. The application of Dijkstra algorithm with fuzzy logic assistance to resolve the shortest path routing problem can be described with an illustration as given in Fig. 5. Figure 5 consists of a graph, G (V, E), where vertices are presented by active nodes in the network and the edge, i.e., cost (Ci) of a link is represented by the fuzzy output value, i.e.., chance of becoming the next forwarder. As given in Algorithm 1, the fuzzy output values, namely distance, direction, speed, position, and trust degree, are computed by each node for their corresponding neighboring nodes. Furthermore, stable routing path is discovered using fuzzy output value. Algorithm 1 describes the procedure for finding the stable routing path for data delivery.
The illustration of the stability aware routing path.
The proposed algorithm’s performance was simulated on MATLAB 7.0 [12–14] and compared with other methods such as the GPSR [10], CFR, Modified FUZZBR [3], and FLGR. Average hop count and average packet delivery ratio are the metrics that were used for analysis.
Table 6 depicts the parameters used for simulation. The number of nodes ranges from 0 to 200 and one source and the destination node is randomly selected from the subset of nodes that are mobile in the network. A vehicle has a maximum speed of 100 m/s and a minimum speed of 0 m/s. Furthermore, a vehicle can transmit a packet of 512 bytes to any other vehicle within a range of 250 m. In addition, the Nakagami-m radio propagation model is adopted and the simulation area is 1000×400 m2. All the input parameters are mentioned in Table 6.
Simulation parameters
Simulation parameters
PDR is calculated by dividing the total packet count successfully received by the total number of packets sent. The graph shown in Fig. 6 illustrates that the MFGR algorithm performed far better compared to the other techniques. The graph demonstrates how the average packet delivery ratio varies with the number of nodes for each of the techniques. MFGR exhibits better results as the node having the highest objective function value is selected. This value is calculated by using a gaussian membership function that considers the five metrics as elucidated in the earlier section. As Fig. 6 illustrates, we can realize that the MFGR outperforms GPSR, CFR, Modified FUZZBR, and FLGR related to maximizing packet delivery ratio at different number of nodes by 88.4%, 19.8%, 5.4%, and 1.5% compared to GPSR, CFR, Modified FUZZBR, and FLGR respectively.
Average Packet Delivery ratio vs No. of nodes.
Figure 7 shows the variation of the average hop count [18] with the number of nodes for all the techniques. The proposed algorithm has a lower average hop count when compared with FLGR, Cost Function, and Modified FUZZBR.
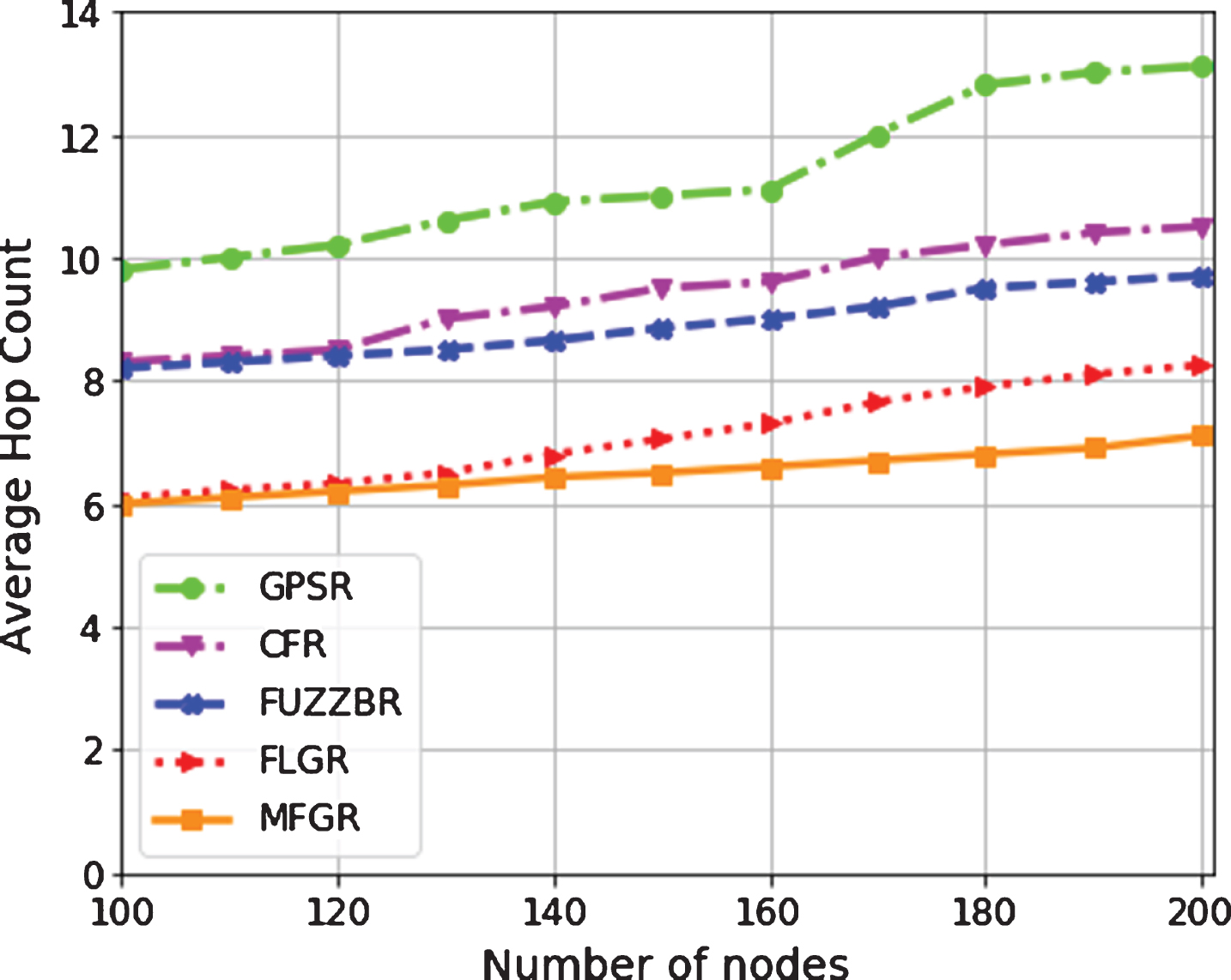
Average Hop Count vs No. of nodes.
Hence it can be concluded that the message will reach the destination with the fewest number of intermediate nodes when MFGR is used. On the average, we can realize that the MFGR always outperforms GPSR, CFR, Modified FUZZBR, and FLGR related to minimizing the average hop count at different number of nodes by 42.5%, 30.1%, 26.9%, and 8.4% compared to GPSR, CFR, Modified FUZZBR, and FLGR respectively.
The Modified Fuzzy-Based Greedy Routing (MFGR) Protocol was designed to improve communication between vehicles in VANETs. MATLAB was used to simulate the MFGR algorithm and further compared it with existing similar algorithms. Based on the evaluations performed, the MFGR algorithm scales well in terms of the average hop count and average packet delivery ratio when compared with the existing algorithms. Different combinations of fuzzy input variables were measured for network performance. A node’s speed, direction, position, distance, and trust degree are considered as the fuzzy input variables. In future work, the current solution can be expanded by proposing a fuzzy system with dynamic function membership for more accuracy by considering the advantage of the solution proposed in this paper.