
Abstract
Wireless Sensor Networks (WSNs) is created, stemming from their applications in distinct areas. Huge sensor nodes are deployed in geographically isolated regions in WSN. As a result of uninterrupted transmission, the energy level of the nodes gets rapidly depleted. Sensor node batteries cannot be replaced or recharged often and maintaining the energy level is a crucial issue. Thus energy efficiency is the significant factor to be consider in WSN. This paper focuses to implement an efficient clustering and routing protocols for maximized network lifetime. Clustering has been confirmed as a successful approach in network organization. The fundamental responsibilities of the clustering mechanism include improved energy efficiency and extended network lifespan. In this work, energy efficiency is improved to maximize lifespan of the WSN by proposing a novel method known as the Populated Cluster aware Routing Protocol (PCRP). The proposed method comprises three different steps: cluster formation, cluster head selection, and multi-hop data transmission. All sensor nodes are joined to a Cluster Head in a single hop in the cluster formation phase. Node distance is calculated and from which cluster head is selected. Then, cluster head aggregates the data from sensor nodes and transfer to the Base Station (BS). The shortest pathway is estimated by the Energy Route Request Adhoc On-demand Distance Vector (ERRAODV) algorithm. The proposed method considers the residual energy involved to attain high energy efficiency and network stability. The experimental analysis is demonstrated to validate the proposed method with existing, which improves the network lifespan. Vital parameters are validated using Network Simulator (NS2).
Introduction
Nowadays, wireless devices are facilitated with digital electronics, wireless communications, and wireless sensor networks (WSNs) [1, 3]. These applications cover areas such as environmental, traffic, and disaster monitoring; security surveillance, especially in defence establishments; overseeing industrial, seismic, healthcare, home, and commercial activity; and assisting in agriculture, family life, and medical diagnosis [9].
The familiarity of sensor networks are multi-node architecture [4]. Sensor nodes monitor information in the specified region and forward the sensed data to the other sensor nodes [2]. Depending on the applications, thousands of sensor nodes are arranged in remote regions for WSN sensing purposes. Problems commonly associated with sensor nodes include i) permission for data aggregation, ii) limited data transmission, iii) increased delay in event diagnosis, iv) the production of the same values by nodes nearby, and v) loss of coverage area. WSNs also have constraints in the form of limited communication distance, finite power resources, and limited network communication bandwidth [20].
When sensors are jointly deployed anywhere, major problems surface, including eavesdropping in transmissions, a collision in the despatched data, and the possibility of disruptive transmissions. There is thus a pressing need for enhanced energy use in WSNs. The ERRAODV algorithm significantly decreases communication overhead, thus reducing interference and energy consumption between sensor nodes. Energy efficiency is improved when compare the proposed algorithm with existing.
In this paper, improving network lifetime is the essential task of all. Lifetime of the network is estimated based on the battery level. If the battery level is low, the data cannot be transmitted to the sink. The sensor node with the maximum consumption holds the higher bound on WSN lifetime when all the nodes consume energy with at constant rate.When a loss of information occurs elapsed, network time is estimated. Here, some nodes may produce energy that is more than or equal to the energy consumed, in which case the network reaches an infinite state after the nodes employ up their battery. In the infinite state, all the remaining nodes are close to the charger, so their energy consumption during around can be enclosed by energy harvested from the charger [11].
A significant problem in ad hoc networks, which has drawn much attention from researchers, is energy consumption [26]. Since the AODV routing protocol uses no nodes with energy in the route discovery phase, packet dropping and link failure problems occur. To overcome link failures and rebroadcast messages, improved node energy is called.
The proposed method aims to extend the lifetime of sensors by proposing a novel method called the Populate Cluster _aware Routing Protocol (PCRP). When nodes move from one location to another, they form clusters that are usually unequal. Here, cluster formation is not static. Intra-cluster communication takes place in a single hop, so, all sensor nodes connect to the cluster head (CH) in a single hop. Sensor nodes distance are calculated and compared with cluster threshold value. After all the cluster member nodes are received at the base station, the energy threshold for all nodes is computed. Cluster head selection is carried out by providing maximum weightage to the residual energy and minimum weightage to the distance, following which aggregation is performed. All sensor nodes send the sensed data to the cluster head, and the average value is estimated. Those values are again passed to the base station through other cluster heads. Finally, the shortest path is estimated using the ERRAODV algorithm.
Key Research Contributions
The main contribution of the proposed protocol is to find the CHs. To attain the above goal, following objectives have to accomplish: To maximize the protocol’s energy efficiency by minimizing the average consumed energy per node, which, in turn, improves network lifetime. To accelerate the protocol’s scalability by multiplying the number of clustered nodes. To augment the protocol’s data delivery reliability by enhancing network throughput.
The paper is structured as follows. Section 2 narrates the methods in the field of interest. Section 3 illustrate the proposed clustering algorithm of the energy model. The proposed Cluster aware Routing-based protocol is explained in Section 4. The proposed protocol properties are summarizes in Section 5. Evaluation of the proposed algorithm is discussed in section 6 with simulations results. Section 7 is completed with conclusion and also included future direction of this work.
Related work
Current studies have touched on the use of mobile chargers to expand the battery lifetime of nodes. Several approaches in the literature have dealt with energy-efficient routing for WSNs [17]. Cluster head selection in WSNs, which is crucial, depends on several factors [22] discussed in the studies below.
In the cluster formation phase, cluster heads are selected at random. [7] proposed cluster head selection using two methods. They are fuzzy logic-based approach and CH candidate selection based on node’s speed and average connection time. [2] applied the MLRC, every node receives a CH message from its neighbours. Choosing the correct cluster head is a challenging task.
[16] Proffered the EM-LEACH algorithm. It develops efficiency of network, for distribution of energy, and increases network lifespan by increasing the quantum of received data. [23] offered to choose cluster heads from the sensor nodes in region, and also proposed routing algorithm to find the path of the data packets. [24] suggested an Improved Multi-Objective Weighted Clustering Algorithm (IMOWCA). Depending on the location, each sensor improves the quality of communication with neighbouring nodes. Depends on the residual energy, the best sensors are selected for communication with the Base Station (BS). [37] suggested to LA. It is used to solve coverage problem of sensing region. [38] applied to data detection method which is used to sense the events and also calculated the data interval degree.
Coordinating of cluster activities are taken care by Cluster head. CH collects the data from the various member nodes in cluster. The BS receives all aggregated data from various CH. [7] discussed the data transmission using high reliable and fixed routing protocol. The LEACH technique has spurred the development of several clustering protocols [30]. Heterogeneous network protocols are discussed [30–32, 34] advanced a single multi-objective approach to estimate the optimal network configuration. [9] proposed a clustering algorithm to select the cluster head using LEACH-C. In this set-up phase, cluster head uses centralized control to distribute the data over an entire network [10]. [15] proposed a method to choose cluster head with high potential. This method also minimizes cluster overlapping through spatial distribution and does not choose malicious nodes as cluster heads. [33] suggested an iABC algorithm to increase global convergence. [18] to maximize WSN lifetime. [1] propounded an MT-CHR protocol that overcomes the drawbacks of the T-LEACH protocol. [5] proposed a routing algorithm for finding an optimal routing using fitness function. [6] recommended QoS based routing protocol to consider the delay and energy consumption. Cluster heads are elected, depending on their energy capabilities and high node density. Their work provides sufficient gains and enhances network reliability by reducing communication delay and energy consumption.
[27] applied the AODV (Ad-hoc On Demand Vector routing) and DSR (Dynamic Source Routing) protocols for geographic routing. A primary challenge in MANETs stems from the high mobility of nodes, culminating in link failure. The DSR protocol operates source routing, while the AODV propagates the next hop information for data packet transmission. The difference between the two routing protocols lies in the transfer of data packets from source to destination. [28] showed that the AODV protocol has significant issues in terms of energy efficiency and adaptability, which are overcome by forwarding the data packets and energy values of nodes using the least-drained node path. [29] advocated a new power-aware routing protocol named EPAR, which executes power-aware routing efficiently. EPAR enhances energy-efficient communication between nodes by estimating the capacity of the node through its residual energy. It also uses a min-max formulation to select a path with the highest packet capacity to handle lower residual packet loss. [36] discussed the security process of data aggregation and decreases the transmission overheads by using EC-ESA.
The life of WSNs is improved by reducing energy consumption [13, 19], which is the primary performance index for WSNs, given that the energy of nodes is limited [14]. [13] proposed a multi-hop transmission scheme based on the Fibonacci sequence which improves the network lifetime. Here, the fuzzy system is used to estimate the efficacy of the cluster head. [11] submitted an efficient localized algorithm and computed the maximum size of the cluster to enhance its lifetime. The proposed method is compared with the traditional 1-hop communication method, and the results obtained show a 360% increase in lifetime. [18] proposed inter and intra cluster multi-hop communication based on threshold mechanism for decreased energy consumption. [25] improved the performance of sensor networks using a synchronized duty cycle. When a packet is forwarded using multiple hops, it requires multiple operational cycles. The AS-MAC protocol proposed by [25] allows sensor nodes to be active on command. Data collision is also avoided using the sleep period of a duty cycle with a mapping function. Existing methods use either residual energy or the CH and the BS distance for cluster formation. In real time, residual energy is vital to improved lifetime and the distance to be considered for convenient cluster formation. The proposed work is designed to use the weighted average of both these parameters that extends network lifetime with natural cluster formation.
Network and energy model
Various sensor nodes are available in the network model which are spread across the target area, along with a base station. The assumptions of the proposed algorithm are as follows. There are N sensor nodes which are distributed in an M×M square field. The base station has no energy constraints and is situated far from the sensing field. All nodes are mobile. After deployment, the base station becomes immobile. Heterogeneous sensor nodes are available with an unchangeable battery. A power control mechanism is used by all the nodes to alter the amount of transmission power available. All sensor nodes are location-unaware. Each node has a unique identity.
Energy is fundamental to the construction and operation of networks. The entire network life cycle depends on the residual energy of each sensor node. Sensor nodes save energy to send and receive data. To estimate the energy consumption of nodes, an appropriate energy consumption model has been proposed, and the first-order radio model applied, as shown in Fig. 1.

Energy Consumption Model.
The radio energy expended to transmit m-bit data is given in Equation (1),
In Equation (4), the energy consumed for each 1-bit data fusion is represented as EDAgg and cluster header’s energy consumption is considered as follows (i) cluster nodes are equipped with the energy to send data. (ii) CH receives the data from cluster node and do the data aggregation (iii) Multi-hop routing protocol is used to transmit the aggregated data to the base station, as shown in Equation (5),
where Ni is denoted as the number of cluster member in cluster i and EDAggas data aggregation energy. The energy dissipated pursues the multipath model because of the considerable distance between the cluster heads in inter-cluster communication.
The proposed method uses the Populated Cluster_ aware Routing Protocol (PCRP) that is similar to the populated cluster formation algorithm method. The Energy and Distance Based Cluster Head Selection algorithm is applied, along with the CH selection algorithm, to estimate the energy and distance concurrently. The proposed phases includes, cluster formation which is used to group the sensor nodes based on residual energy and distance from base station, and cluster head selection is picked for data aggregation and relay transmission. Elect the CH based on the residual energy of each node and the node calculates the distance to the BS.
As far the CH, every node’s residual energy is to be the important factor for balancing the energy consumption. Intra-network communication mostly considers the Euclidean distance to estimate the distance from one node to another. The cluster head is joined to cluster members through single-hop communication. PCRP parameters are applied from each node to the base station. Eligible nodes can be nominated for CH based on the PCRP parameters.
The proposed routing protocol named as ERRAODV protocol is based on packet size and relay transmission. It is a reactive protocol that uses an energy rank to transmit the data. The path selection of ERRAODV is shown in Fig. 2.
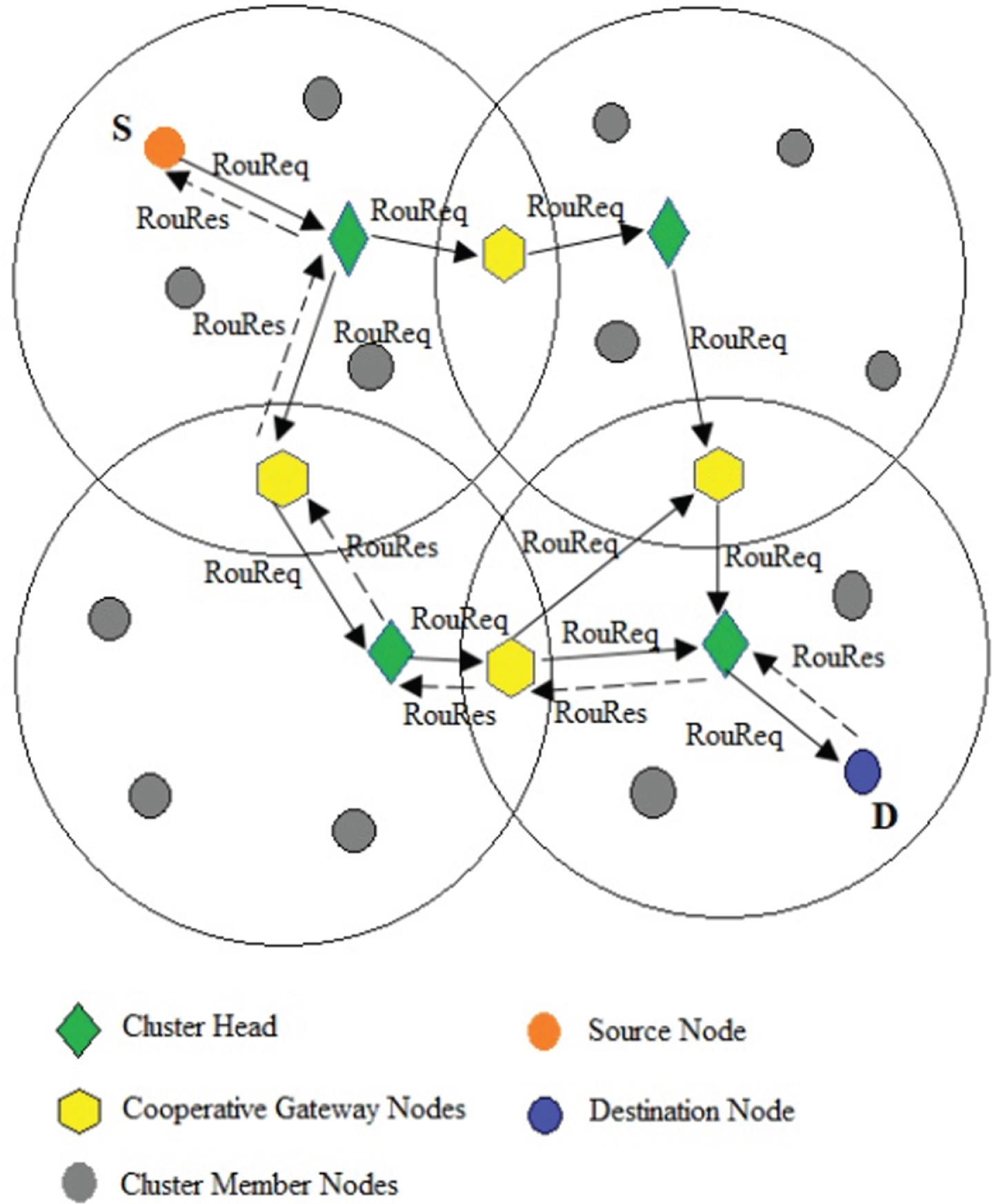
Path selection using ERRAODV.
This reactive protocol has the following assumptions. Every cluster has its cluster head. There is a common node between every intersecting area of at least two clusters. Packets are transmitted through CH using relay transmission.
Every CH sends the route request message with data packet to a neighboring CH, obtains the request through a common node. These selections are made based on the energy rank. Thus the route request packet is forwarded until the packet reaches the destination. On the successful reception of the route request, the destination sends a route response through the same set of nodes in reverse direction. The packet is send from source node to base station through shortest path. This minimizes energy consumption throughout data transmission. If the source node is a member of a cluster, the proposed method aims to minimize message transmission costs in the entire network using the clustering_routing-based algorithm. For each hop, a CH is determined, and the path between the CH and the BS is defined. Control message description is shown in the Table 1.
Control Messages description
There are two phases in the protocol operation, i.e set up and data transmission phases. Steps followed by Populated Cluster_ aware Routing Protocol (PCRP) is shown in Fig. 3.

Steps followed by Populated Cluster_ aware Routing Protocol (PCRP).
The following steps are followed in this phase. Initial- level computation stage Cluster formation stage Cluster head selection competition stage Route construction stage
Initial-level computation stage: In this stage, BS_Msg is broadcasted from BS to every sensor nodes in a radio radius, RTRAN. After each node receives the control packets, the distance to the BS is estimated by sending a Send_Res_BS_Msg, which contains information such as the sensor node_id and distance to the base station, using Equation (6)
Cluster formation stage:Cluster formation is the second stage of the setup phase in PCRP and it is explained in Algorithm 1.
1. Initialize
2. Cluster_range = m;
3. Min_clu_size = 0;
4. Max_clu_size = MC;
5. CThv = No_of_nodes/MC;
6. Ci{ } = NULL;
7. Connectivity_vector[member_count] as
FALSE;
8. Rem_member = CThv ;
9. Begin
10. Call BS_Announce;
11. do
12. Call Update_MT;
13. Ci = Populate_Cluster();
14. {N}←{N}-{Ci};
15. While(N! = NULL);
16. End
Procedure BS_Announce
1. BS Broadcast BS_Msg in RTRAN
2. ∀n ∈ N,
3. Compute_Dist(n, BS);
4. Send_Res_BS_Msg(n);
End procedure
Procedure Update_MT
1. ∀n ∈ N,
2. for i = 1:n
3. MNT[i].DisttoBS = Send_Res_BS_Msg[i].
DisttoBS;
4. End for
5. Asending_sort(MNT, DisttoBS);
End procedure
Procedure Populate_Cluster
1. Member_count = size(MNT);
2. for i = 1: Member_count
3. for j = i+1: Member_count
4. Member_Dist[i][j] = Dist_Between(i,j);
5. End for;
6. End for;
7. While(! end(MNT)=φ) do
8. i = 1;
9. for j = 2: Member_count
10. while(Rem_member! = 0)
11. if (Member_Dist[i][j]≤m)
12. Connectivity_vector[j] = TRUE;
13. Ci←nj;
14. End if;
15. Decrease.Rem_member;
16. End while;
17. End for;
18. Return Ci ;
19. End while;
End procedure
Clusters are formed when nodes move from one location to another. Cluster formation is dynamic because all the clusters are unequal, rendering the nodes dynamic. Single- hop transmission is used in Intra-cluster formation. M is initialized as the cluster range in the communication range of sensor nodes such that MNT[0]. The minimum number of clusters is represented as a Min_clu_size, and set as 0, while the maximum number of clusters is represented as a user-defined. Max_clu_size. Then, the cluster threshold is represented as CThv, which is estimated as the No_of_nodes / Max_clu_size. The Connectivity_Vector of the member count is set as false, and the BS_Announce procedure called. The base station broadcasts a BS_Msg in the transmission range RTRAN. All the sensor nodes calculate the distance to the base station by dispatching a Send_Res_BS_Msg() function, followed by the call Update_MT procedure. The base station maintains an MNT table where all the distance values of all sensor nodes are stored. In the MNT table, the distance values are sorted in ascending order. The initial-level computation takes place, as in Equation (6), followed by the Populate_Cluster procedure, where the cluster threshold values are stored in the Rem_member variable. The size of the MNT table found is stored in the member_count. The Euclidean distance is applied to calculate the distance between one node and another in all sensors, and the distance value is stored in the Member_Dist [][] using Equation (7). A check is carried out to ascertain that the sensor nodes are present in the cluster range. If they are, the Connectivity_Vector (CV) set value is updated to show TRUE, a procedure that is shown in Equation (8). The process is repeated until the Rem_member reaches zero, following which the remaining nodes consider the next cluster to be formed. nodex
i
and nodeyi, are denoted as the coordinates of node i and node j. node i and node j’s distances are expressed as follows:
Cluster he ad selection competition stage: The cluster head selection competition stage is carried out by the PCRP and explained in Algorithm 2. The energy threshold is computed using Equation (9)
1. Initialize
2. EThv = EResi/2;
3. Begin
4. If CMNode. Rec_BS_Msgi() then
5. Compute {EThvi}, i = 1,2,3, ... n
6. ∀n ∈ N, Broadcast.IMsg() in RC
7. For i = 1:n
8. CMNT[i].DisttoBS = IMsg[i]. DisttoBS;
9. CMNT[i]. EResi = IMsg[i]. EResi;
10. End for;
11. While (!end(CMNT)) do
12. For i = 1:n
13. Find Cobj[i] = W1 X EResi[i] + W2 X
DisttoBS[i];
14. End for;
15. End While;
16. Desending_Sort(Cobj[]);
17. CHi←ni, if n1.Cobj = =Cobj[0], ni ɛ N
18. End
All the cluster member nodes receive Rec_BS_Msgi() as the BS message. The cluster range is compared with the threshold value based on the energy level of every node. BS receives IMsg() from all the member nodes in cluster. The IMsg contains the distance to the BS and residual energy. The information is maintained by the Cluster Member Node Table (CMNT) using Equation (10).
From the MNT table, each value is considered one by one to estimate the value of Cobj[], using Equation (11)
Here, the maximum weightage is provided to the residual energy. The minimum weightage is provided to the estimated distance of the base station. The cluster head selection process is performed, and the values obtained in Cobj[k] are arranged in descending order. n j of Cobj[0] is assigned as the cluster head.
Route construction stage: The route construction stage is the last step of the process and is performed in the PCRP. Each CH identifies its succeeding hop to facilitate the estimation of optimal path in the dynamic network. In inter-cluster communication, multiple criteria are considered to resolve energy efficiency requirements. The cluster head acquires more energy due to aggregation of huge data from various member nodes. So, the data is aggregated and forwarded to the BS which makes the clusters in uneven sizes. So the nodes are not distributed in the network uniformly. There are more cluster heads in dense areas than in sparse ones. Consequently, intra-cluster transmissions are led more energy wastage. Such nodes are not fitted to be a relay transmission. In inter-cluster data transmissions, cluster heads cover fewer cluster members in sparse areas, which is rational.
The proposed approach improves energy consumption by balancing the inter and intra-cluster environment and avoids the early failure of the cluster heads in intense areas. The ERRAODV is applied to estimate the shortest energy efficient path to the base station, using multi-hop data communication in the cluster heads. One-hop communications fail to perform as expected in large-scale environments, simply because the cluster heads cannot modify their transmission range to arrive at the base station. To defeat this, a reliable intermediate node named as a common node is identified to forward the packets between two cluster heads. The quantum of information’s obtain from the inter-cluster communication, decides the number of transmission path to the base station. Moreover, the fact that heterogeneous nodes with advanced remaining energy are improved equipped to handle additional forwarding tasks is taken into the explanation. The cluster heads which receive the CH_Msg from nodes with less distance to the BS will participate in the competition. CHs correspond with the base station using the multi-hop routing approach.
The proposed ERRAODV method uses the energy rank (Er) to choose the next forwarding RouReq and residual energy (Er) is updated to the packet header which is not in the existing AODV protocol. When a common node between the two neighboring clusters receive RouReq packet and it checks for the energy rank field in its header. If the threshold energy rank (ETH) is greater than or equal to the residual energy value, the request is saved and forwarded to next suitable CH or else it is dropped. The intermediate node is saved the RouReq in a cache_memory (CAM) table for a time(t), when it continues to receive other RouReqs. The intermediate node compares the energy rank with the threshold, if the node is available with sufficient energy, RouReq is forwarded and saved in CAM routing table. The RouReq is forwarded, if the higher energy rank and lower hop count than the stored old RouReq, New RouReq is not received for a period of time from neighbor nodes, afterwards forwarded the old RouReq stored in the routing table,eventhough the nodes with low energy value and low hop count. This results shows of longer network lifetime with the collection of the shortest possible path. Assume that a packet with size np is being forwarded to a node at a distance of d, then the energy rank Er is calculated as given in Equation 12.
Where power consumption is represented as Eelec for transmitting and receiving data from the antennas, ξ
f
and ξ
a
are the energy consumption parameters of the emission amplifier.
In the initial-level computation stage, the distance between the sensor nodes and the BS is calculated in the transmission region, RTRAN. In the cluster formation stage, clusters are formed in all the sensor nodes using the local data of the sensor nodes themselves and the relevant parameters. In the cluster head selection competition stage, a CH is selected in the member nodes within the cluster range, RC . The CH is estimated using the minimum distance to the BS and the maximum residual energy. In the route construction stage, optimal transmission is made enabled between the selected cluster heads using the ERRAODV algorithm.
Finally, in the data transmission stage, the sensed data from every node is routed to the base station. The proposed algorithm improves the network life time and decreases the overhead using data transmission setup phase. The role of the cluster heads is alternated proficiently using the sensor nodes with balanced energy consumption. Also, the optimal path is estimated dynamically when sensor nodes move from one location to another.
In this phase, all cluster members collect data from their surroundings and transfer it through a single hop to the related cluster head, which confirms the contents of the incoming data. The cluster heads aggregate and combines the data by removing the redundant data. Each CH sends the data to the BS through relay transmission once the data fusion process is completed. Data transmission is undertaken in two steps: inter-cluster and intra-cluster data communication. Every cluster head in intra-cluster data communication, assigns a TDMA time slot to its cluster members for scheduling their transmission time. So, every node send the data in the assigned time slot.
In inter-cluster data communication, data aggregation is executed, with each CH transfering data to the BS after having estimated the shortest path to it through relay transmission. It also carries out forwarding tasks of the data of other cluster heads. With unevenly-sized clusters, energy dissipation among cluster members is easily balanced and unequal energy consumption in cluster head.
Protocol analysis
Clustering analysis
Simulations
The performance of ERRADOV algorithms is demonstrated through simulations using NS2. 100 nodes are indiscriminately allocated over a 2000 m×2000 m network field. Here, the base station is set for the complete network region. The proposed method is compared with LEACH, EHE_LEACH, LEACH_C, and SMPSO_C. The proposed ERRADOV algorithms decreases the control packets count and increase network lifetime and balances the load among the cluster heads in inter and intra-cluster transmission. Simulation is carried out using 100 nodes and the analysis are made with100 runs.
The network topology of the initial setup is shown in the Fig. 4, and Fig. 5 depicts it after clustering. Simulation parameters are depicted in Table 2.

Network Topology Initial Setup.

Network Topology after Clustering.
Parameter Setting
During the simulation, throughput is defined as the number of data packets effectively received at the base station. Table 2 compares network throughput with the proposed method and the existing protocols. It is observed that the former outperforms the latter. In Fig. 6, the throughput of ERRADOV is higher than that of the existing protocols. Figure 6 depicts how the proposed algorithm is eliminated the data retransmission and interference in the cluster by applying the given bandwidth. It also provides high throughput when compare to existing methods.

Throughput Vs No of Nodes.
Simulation is carried out with 50 nodes for the first 60 seconds, Gradual increases in time leads to increases the throughput. As also shown in Fig. 6, the throughput of ERRADOV is better when compared with 200 nodes. The reconstruction of a new path is unnecessary in the proposed method, owing to increased network lifetime for successive packet transmissions between the same source- and-destination pairs.
Figure 7 depicts that the proposed method has an improved packet delivery ratio than existing methods on account of the stability of the path in the proposed protocol. Here, cluster members are allocated based on the time of connection, and the rate of the packet delivery ratio ranges from 98.88% to 92.58%. Further, the node’s speed increases between 10 and 50 m/s, while the values in the existing method range from 89.77% to 82.31% respectively.

Packet Delivery Ratio Vs No of Nodes.
The proposed protocol extends the network lifetime by reducing link breakages and delivering most of the sent packets. The proposed methods is considered the residual energy to increases the network lifetime. Based on the residual energy between the sink and the other cluster heads, nodes are selected to become relay nodes. Simulation results depict that the proposed method has a higher packet delivery ratio than the existing methods.
Figure 8 depicts that the proposed method is little when compared to that of the existing methods. In the proposed method, the CH’s are connected in the entire network, and links are available to all the member nodes in cluster. This technique eliminates the remote node failure and reduces the number of control packets better than existing methods. Figure 6, Fig. 7 and Fig. 8 depicts that the proposed method outperforms the existing techniques in average energy consumption, throughput, packet delivery ratio. The control overhead, end-to-end delay, number of nodes in the sensing area increases, when increases the hop counts connecting the CHs and the BS.

Delay Graph Vs. No of nodes.
The proposed protocol is estimated and evaluated with protocols, namely LEACH, LEACH-C, SMPSO, EHE-LEACH to execute the proposed method. Initially, 100 nodes are measured by evolving 100 iterations. The results illustrate that the density of the network increases whereas cluster heads decreases per round. The existing methods, namely LEACH, LEACH-C, SMPSO, EHE-LEACH also attain a fixed number of cluster heads.
In densely deployed networks, the proposed method has improved scalability than the other existing protocols and the parameters are shown in Table 2. Here, sleep power measures the energy efficient and low latency in the protocol.
Residual energy
Contingent on their distance to the BS, nodes are labeled. The nearest sensor nodes are integrated into a cluster, while the farthest ones are separated into different clusters. If the cluster member node with the greatest residual energy then its elected the next cluster head in every cluster, which increases network lifetime. The proposed method balances the network by allowing for the node’s residual energy and maximizing the network lifetime.
In Fig. 9, the ERRADOV algorithm has a lower energy consumption rate than that of existing methods. Simulates the network with 50 nodes, the ERRADOV algorithm is compared with AODV by using standard of 90J initially and then with 100J. It shows that 10% reduction in its energy consumption. In all other simulated settings of 100, 150 and 200 nodes, ERRADOV uses very little energy compared to the AODV. The results depict that the proposed method make use of fewer energy by enlarging the network lifetime.

A Comparison of Residual Energy.
In the proposed work, since few nodes use up all their energy, network lifespan is very much expanded. The residual energy was estimated using 50, 100, 150, and 200 nodes in this simulation. The source node in the proposed method has more energy than that of AODV.
Figure 10 compares the residual energy of the existing methods and the proposed method, with sensor node speeds varying from 15 m/s to 90 m/s in an interval of 15. The result shows that the proposed method retains maximum residual energy better than other methods. In 5 m/s, the residual energy at a minimum increases up to 60 m/s and remains unchanged after that. The residual energy increases alongside the sensor node speed as the cluster is dynamically re-formed, based on the new positions. The SMPSO_C also retains higher residual energy, given that it is an optimization method to minimize energy consumption.

Speed vs Residual Energy.
The proposed ERRAODV method selects a fast and low energy path to forward packets for inter and intra cluster communication. The performance of ERRAODV is compared with AODV for residual energy and end to end delay. Figure 11 compares the residual energy for the data transmission for networks with various number of nodes. The result depicts the selection of paths based on the energy rank that minimizes energy consumption.

Comparison of Residual energy AODV vs ERRAODV.
The energy rank in ERRAODV is calculated based on the distance threshold value that depends on energy factors. This ensures the selection of paths with the shortest distance and it leads to fast packet transmission. Figure 12 compares the delay of data transmission using ERRAODV and AODV. It is proved that ERRAODV gives fast data transmission from source to destination.

Comparison of Delay AODV vs ERRAODV.
The PCRP is proposed in this work for improves the lifetime of sensors. Here, cluster formation is dynamic in nature and intra-cluster communication takes place in a single hop. Single hop is used to link all sensor nodes and CH in the cluster. The distance between the nodes in all the sensors is calculated, and the distance value compared with the cluster range and added to the cluster threshold value. After all the cluster member nodes are received at the base station, the energy threshold for all nodes is computed. Cluster head selection is carried out by providing maximum weightage to the residual energy and minimum weightage to the distance. The shortest path is estimated using the ERRAODV procedure. The number of active CH is minimized, and the network energy is maximized. Inter-cluster transmission is restricted to the cluster head, resulting in fewer active nodes. It minimizes the average energy inspired per node and enhances the network’s energy efficiency.
The performance of the proposed method is estimated and balanced to the existing protocols such as LEACH-C, LEACH, SMPSO, and EHE-LEACH. Simulated results show that the ERRAODV method works well than the existing techniques based on average energy consumption per node, throughput at the base station, clustered nodes, and execution time. The proposed protocol saves energy of nodes and offers an improved packet delivery ratio and improved throughput. ERRAODV finds the path that can consume less energy and the shortest path. This saves more energy during data transmission and high-speed data transmission. Our future research will focus on optimal transmission power for sensor nodes. Excess intrusion in the network is created if a node passes the packets with high power and it requires additional energy for relay transmission. Low transmission power is adequate for two adjacent nodes to communicate. Future directions of this work includes to find optimum transmission power required for each sensor node during the clustering process.