
Abstract
Tennis is a set of sports and entertainment and a sports activity, since 2014, tennis in China has been another rapid development. With the development of economy and technology, tennis training mode has been further optimized and reformed. At present, tennis training robot is the mainstream way to train athletes. However, there are some defects in the current tennis training robots, such as the low accuracy of human motion real-time evaluation, and the lack of stability. Therefore, this paper puts forward the related research on the real-time evaluation algorithm of human motion in tennis training robots, hoping to make up for the deficiency in this field. The research of this paper is mainly divided into four parts. The first part is to analyze the current situation of technology research in this field and put forward the idea of this paper by analyzing the shortcomings of the existing technology. The second part is the related basic theory research; this part deeply studies the core theory of tennis training and intelligent training robot, which provides a theoretical basis for the realization of the optimization scheme. The third part is the design and implementation of a real-time human motion evaluation optimization algorithm for tennis training robots. At the end of the paper, that is, the fourth part, through the way of field test and investigation, further proves the superiority of the improved real-time evaluation algorithm of human movement. The algorithm has good stability and accuracy and can meet the existing tennis training requirements.
Introduction
China’s comprehensive economic strength has achieved remarkable growth in the recent ten years, including the continued expansion of urbanization scale and the continuous improvement of people’s real income levels [1]. It has greatly promoted the people’s pursuit and yearning for a higher living standard, and the national fitness campaign is vigorously launched in this context. With Li Ting and Sun Tiantian winning the historic women’s Doubles Championship in the Athens Olympic Games and the success of the 29th Summer Olympic Games held in Beijing in 2008, tennis has gradually become known to people. After that, Li Na won two Grand Slam events in 2011 French Open and 2014 Australian Open, pushing China’s tennis to a new climax.
Tennis with its elegant movements and elegant taste has become a popular fashion sport in our school. However, many colleges and universities or training institutions have been faced with the objective situation of space shortage, training ball shortage, teacher shortage, and so on. This is corresponding to the increase in the number of tennis elective students every year. These adverse factors seriously restrict the development of tennis to a higher level in China. A tennis training robot is a kind of three-dimensional robot that can be carried and pulled at will [2]. It relies on two operating belts inside the machine to wipe out the ball, forming a similar role of manual throwing and feeding. The main purpose of a tennis training robot is to facilitate beginners to do simple single ball practice. It has the following characteristics: (1) it can cover the court, not use multiple balls, but serve at will. (2) It can be adjusted according to individual needs, and the control is good to achieve the best training effect. (3) The box is built-in design, easy to move, low noise, and durable. (4) The site requirements are simple and the use conditions are low. (5) It is suitable for players at all levels to practice and experience the most real man-machine war. It can effectively improve the students’ ability of verification, prediction, and timely response. At the same time, the tennis training robot also exposes its shortcomings. As a robot, there are still some deficiencies in human motion capture and real-time evaluation, which is one of the core issues in this field [3]. Based on the current situation of tennis teaching in our country, to make the tennis movement better, this paper puts forward research real-time evaluation algorithm of human motion in the tennis training robot, to further optimize the shortcomings of the existing tennis training robot in human motion evaluation by exploring practical activities, to promote the development of tennis in China.
This paper describes the optimization method of human motion real-time evaluation for tennis training robots, introduces the application of intelligent robots in the tennis training field, and points out the shortcomings of traditional training methods and intelligent robots. Based on previous studies, this paper introduces the human body sign recognition and extraction optimization algorithm, combines the theory with kinematics analysis, and applies it to path planning and action recognition of intelligent robots, and constructs a new human action recognition algorithm of intelligent robot. The algorithm improves the low precision problem of the traditional algorithm and optimizes the structure and parameters of the control system. In this paper, the detailed theoretical research methods and operation steps are given. To verify the actual effect of this algorithm, a performance test experiment is established at the end of this paper. Through many comparative experiments, it is proved that the real-time human motion evaluation optimization algorithm in tennis training robot has better stability and accuracy than the traditional algorithm. And the satisfaction survey of the new system is carried out in the form of practical experience and a questionnaire [4]. According to the survey results, the optimization system in this paper improves the training efficiency and interest compared with the traditional system and has higher satisfaction among students. This experiment has achieved ideal results and made contributions to the research in this field [5–7].
The content of this paper is arranged as follows: in the second part of this paper, the relevant contributions of predecessors are introduced, and the main problems are found out, and the optimization model in this paper is put forward. The third chapter introduces the theoretical basis of tennis training and intelligent training robot. In Chapter 4, according to the shortcomings of the previous algorithms, an optimization method based on the combination of human motion feature capture and kinematics analysis is proposed to realize the high-precision control of the intelligent robot in a dynamic environment [8]. In the fifth chapter, the simulation experiment of the tennis training robot optimization system proposed in this paper is carried out through the experiment part, which shows the advantages of the method in this paper. The sixth chapter summarizes the advantages of the algorithm and the significance of this study.
Related works
The training robot refers to the intelligent equipment used in competitive sports and various sports activities [9]. There are few theoretical types of research on the application of a training robot in tennis teaching and training, and the research on its mechanism and the auxiliary effect is not very comprehensive. But it determines the application of tennis training robots in tennis teaching and training, which can effectively improve the mastery and competitiveness of tennis technology.
He Haihua [10] in its application in experimental teaching to assist in obtaining tennis coaches, auxiliary teaching can effectively alleviate the prominent problems of less space and shortage of teachers in Colleges and universities. The increase of touch feeling can effectively increase the expected number of students and response-ability of the ball; mobilize the enthusiasm of students and interest in practice, to improve the learning efficiency of tennis technology. Ma Jun [11] pointed out in his experimental research that the auxiliary teaching of serving and serve machines can significantly improve students’ tennis skills, which is conducive to teachers’ individualized teaching for the problems found. The multi-ball running practice of the fixed service of the server not only improves the students’ sense of the ball but also improves the intensity of physical exercise. At the same time, he also pointed out that new elements and technical means should be added. According to the actual situation of each place and the creation of teaching methods and systems in line with the new form are the key means to improve the quality of teaching. Colleges and universities that take tennis courses should be selected. Through experimental comparison, Kuaiyi tennis teaching and Training Institute found that compared with the traditional tennis teaching methods, the application of tennis training robot teaching method can significantly improve students’ learning enthusiasm and participation fun, which is very suitable for basic teaching and can effectively improve learning efficiency. Some famous tennis training bases abroad, such as Nick tennis training school, also use a large number of physical equipment and technical auxiliary equipment for tennis fine teaching, which effectively improves the tennis technical level of students at different levels.
Therefore, the application of training robot in tennis teaching can effectively improve the actual learning effect of tennis teaching, whether it is to improve the basic hitting skills of tennis, or to improve the comprehensive physical quality of students, or to improve students’ interest in learning.
Basic theory and core concepts of this paper
Development of tennis in china
After the Opium War in 1840, Western officials, businessmen, missionaries, and China brought tennis to China. According to records, in 1848, foreigners played tennis in Shanghai. At first, tennis was a fitness activity for foreign businessmen, officials, and white-collar workers. China’s rich class and church schools gradually participated in it, and various tennis associations and clubs were established.
Tennis is one of the four events in the first National Games of old China held in Nanjing in 1910. After the founding of the People’s Republic of China on October 1, 1949, the areas and cities where tennis had a certain foundation before the founding of new China gradually recovered. After the founding of the People’s Republic of China, China’s earliest temporary national tennis team was established in 1955. It was not until 1958 that Beijing had a decent tennis court. With the efforts of general Wan Li and general Lu Zhengzheng, the first two tennis courts were built in less than half a year. Tennis began to develop again in 1956 but stopped in 1961 due to the country’s economic difficulties. In 1959, there were more than ten excellent tennis teams in China. However, in October 1962, the national ten unit tennis competition was held in Beijing, which was the first time to resume the game after all competitions were suspended during China’s economic difficulties. The Cultural Revolution that began in June 1966 had a devastating impact on tennis. From 1972 to 1973, the sport gradually recovered. In the period before the competition, excellent athletes were selected and there was no special head coach. To adapt to the development trend of tennis technology in the late 1970 s, the reform was carried out. Such as advocating the use of service to net technology, simplifying scoring methods and other measures, effectively promote the development of tennis players in China, enhance the sense of attack, and make up for the technical defects of Chinese players. Women, in particular, are among the best in Asia within a few years. Since 1975, the development of tennis in China has gradually embarked on the track, more than a dozen provinces and cities have established tennis teams. From the 1980 s to the 1990 s, through the efforts of many people, China’s women’s competitive tennis has made a series of good achievements, and the national college tennis and public tennis are also booming [12, 13].
Development of tennis in china
At present, two important problems in the research of tennis training robot are the robot want and these two problems, which means that the robot must first clearly want to go to their geographical location, the location of the target location, not only the name of the location but also tell the robot after quantification. Positioning, how to display, the robot must know its direction and the location of the target, the robot must know its direction, which is navigation. Positioning technology is to provide a clear geographical location for the robot through sensors or given known information, and then the robot can accurately locate [14]. Finally, the robot can indicate the direction of the robot through the landmark or azimuth, to realize the navigation function. The methods can be divided into:
Environmental map positioning:
The robot will record the complete map in advance, detect the surrounding environment information through sensors, and feedback to the system during the navigation process [15]. The robot uses this information to build a local map of the current state and then uses the local map to match the complete map. Finally, the position of the robot is determined by the matching results, and the navigation function of the robot is realized according to the planned path.
Landmark positioning:
Going forward will be special things like scenes, smells of road signs, the coordinates, and features of these signs tell the robot. By detecting these landmarks, the machine obtains the information of the surrounding environment and determines the position of the robot itself.
Sensor positioning:
Using GPS, wireless communication base station, and other sensors to establish the absolute coordinate system diagram [16], the robot first determines the position in the coordinate system and then obtains the location of the destination, so that the robot can drive to the destination. In the process of driving, visual obstacle avoidance and ultrasonic obstacle avoidance technology are added to complete the navigation.
Preset guide positioning:
Compared with other methods, this method is relatively simple. Although the layout cost of the website is high, it is easy to implement. Line finding is a commonly used navigation method for robots, but this navigation method has a great impact on the working environment of robots [17]. Once the layout is determined, the guide rail cannot be changed at will and lacks flexibility.
Path planning
After solving the problem of how to walk, how to walk fast, or achieve a certain goal is a sharp problem of optimizing the efficiency of an intelligent mobile robot. In order to solve the outstanding problem of an intelligent mobile robot, scientists put forward path planning. Secondly, good path planning can not only improve work quality intelligent mobile robot but also save a lot of time for the robot
Environmental path planning:
The representative algorithms include A* method, topological graph method, and viewable method [20]. The algorithm has a good effect when the complete map is given in advance. However, if the environment information changes frequently, this method cannot achieve the desired effect.
Sensor information path planning:
The representative algorithms are the artificial potential field method and the fuzzy logic method. These algorithms are mainly used to assist the global path planning of robot. Generally speaking, these algorithms are used for local path planning to assist the robot in path planning, to achieve more reasonable and effective global path planning.
Behavior path planning:
The purpose of this path planning is to subdivide the whole navigation problem into several relatively independent units, such as obstacle avoidance and tracking [22]. In this way, the robot can not only complete each independent work unit but also coordinate with each other to achieve the goal of the whole path planning task.
Representation of human motion
At present, there are still some challenges in the direct control of human mobile robots, among which the biggest difficulty may be the representation mapping of a large number of degrees of freedom. In the field of engineering and control, the development of robot technology simplifies human motion into joints, links and corresponding trajectories. In terms of coordination, these trajectories can be fully described and quantified. This method can accurately describe and simulate human motion, and modify the specific motion parameters by weighting the influence of space, threshold and self-avoidance. A framework for a better understanding of human motion has been developed by bridging motion research from the perspective of coordination and engineering implementation [18, 19].
Real time human motion evaluation and optimization system for tennis training robot
Main processor
Considering the specific application scenarios and requirements of this design, the main processor, as a hardware sensor module, should pay attention to the volume and power consumption factors, and ensure to meet the requirements of the hardware sensor module. In terms of volume, the package of the main processor chip should not be too large; otherwise, the PCB wiring of the whole hardware sensor module will be affected. In terms of power consumption, the system should ensure the battery life of the hardware sensor module during tennis training, so the power consumption of the main processor should not be too large. In terms of performance, the main processor needs to be able to attach sensors, have a hardware interface for inter-chip communication, and preferably have the function of low-power wireless communication.
Based on the above requirement analysis, nRF51765, a low-power chip dedicated to wireless communication, is selected as the main processor of the hardware sensor module [21]. The chip is based on 32-bit arm cortex Mo core and Bluetooth 4.2 ble, which meets the requirements of low power consumption. The chip adopts 8 mm×8 mm QFN 64 pin package, which is small in size and can meet the requirements of system design volume. The chip is equipped with 256 Kbytes flash and 18 Kbytes ram, and the maximum main frequency is 18 MHz, which can meet the requirements of hardware sensor module calculation ability. The chip provides 36 GPIO ports, and each port can be programmed into ADC, USART, IIC, and other peripheral interfaces through pin configuration register to meet the requirements of inter-chip communication.
Structural design
According to the overall design scheme, the design of the transmitter mechanism should meet the following requirements: The mechanism is simple, reliable, and efficient. Only squeeze the friction launch of the tennis ball to minimize the loss of tennis ball. The speed of two wheels is synchronous, accurate, and controllable, with a minimum of 45 km / h and a maximum of 220 km / h. Because it is located on the two-dimensional pan tilt, it needs relatively lightweight to ensure the stability of the whole machine. It can be accelerated to the specified launch speed.
The launching mechanism is composed of two transmitting motors, two driving wheels and their fixed seats, two driving wheels and their fixed bases, a FINE adjustment structure, two annular substrate belts, two grating sensors, and a mounting base plate. The stroke of the transmitter is reflected by the left and right centerlines, which are acceleration transmission channels. The transmitting motor is embedded in the driving wheel and then installed on the fixed base. The grating sensor is installed at the output shaft to detect the speed of the feedback motor and form a closed-loop control. The driven wheel is installed on the fixed base through a bearing and a rotating shaft, and the driving wheel mounting seat is connected with the driven wheel mounting seat through a fine adjustment structure; a ring base plate is arranged between the two wheels, and the tightness of the base plate can be adjusted through the fine adjustment structure. Finally, two symmetrical pulley structures are installed and fixed on the mounting base plate, and the holes connecting the two-dimensional pan-tilt mechanism are designed on the mounting base plate. A suitable width is designed between the two driving wheels to form the badminton launching channel, and the two driving wheels form the entrance of the badminton transmitter. The transmitting channel can send the ball at the specified speed by clamping the ball on the baseband for a certain distance, so as to accelerate the flight out.
Kinematic analysis
After simplifying the model, the mechanism is symmetrical. In normal operation, the driving wheels of M drives the motor under the action of driving torque. The angular velocity of the driving wheel driving the base plate V
belt
and ω is the same as the angular speed of the driving wheel rotation, ω nRPM motor speed is setting:
The tennis ball enters the launch port, enters through the friction force, and then squeezes the tennis ball; the friction force causes the tennis ball to accelerate. After the acceleration distance of L, the speed of the tennis ball V ball reaches the speed of V belt , and then launches at the specified angle.
Because the contact time between the tennis ball and baseband is very short, each other is the strength. The strength increases sharply and decreases sharply. The average force is very large. This is the external force, which can be approximately zero. According to the law of conservation of angular momentum, it is assumed that the driving torque of the motor only provides the dynamic state of overcoming the rotational resistance and the wheel rotation of the D-Circle diameter of badminton.
The mass of the tennis ball is 10 g, and the total mass of the driving wheel, driven wheel and substrate is about 1500 g;
It can be seen that due to the small mass of the tennis ball, the kinetic energy loss during transmitter launching is small, and the motor power can be timely supplemented, and the tennis ball from the speed can be about the initial set speed sensor.
There is only one rotating motor in the ball storage mechanism. The rotating shaft is vertically installed and the ball reservoir rotates horizontally. There are 8 ball storage tubes, only 1 / 8 circles need to be rotated each time. The motor torque only needs to overcome the sliding rotation resistance of the ball tube to the shell. The material of the cylinder seat is POM, and the friction coefficient μ is 0.25. The mass of the ball filled with tube m is about 4.6 kg. The designed sliding radius r is 138 mm;
According to the design requirements, the GM32-640 motor and 36 V power supply are selected and a unified voltage power supply is adopted. The parameters are shown in Table 1 below.
Parameter List of Gm32-640 Motor
When the reduction ratio is 1:160, the rated speed of the motor is 35 rpm, that is, the shortest time of ball changer is about 0.2 S, the rated torque is 0.9 n. M and the torque of the hindered rotor are 2.7 N. M. Therefore, GM32-640 motor with a deceleration ratio of 1:160 is selected as the power of the ball storage mechanism.
The human body can be divided into the trunk, mainly divided into ten parts. The trunk port is the root node in the structure. Firstly, its position is detected, and then the human body part shown by the second layer node in the structure is detected. The detection order of the second layer nodes can be arbitrary and does not affect each other. Finally, the detection sequence of the third layer node can be arbitrary.
Each part can be represented by a rectangular box, r i is r i = (x i , y i , θ i , w i , h i ) , i = 1, 2, …, 10, where x i is the abscissa of the center of the rectangle in the image, y i is the ordinate of the center of the rectangle in the image, and θ i is the inclined angle of the long side of the rectangular box, w i is the width of the rectangle and h i is the length of the rectangle. First of all, the image to be processed is normalized, that is, the image size is 250×380, and people are located in the middle of the image, so the size of people and the size of various parts of the body are fixed. The length and width (h i ,w i ) of each part can be considered as fixed, and the variable of each rectangle is (x i , y i , θ i )). The purpose of this paper is to solve the (x i , y i , θ i ) of ten components.
Some of the ten parts are symmetrical and can be divided into six categories: head, trunk, upper limbs, lower limbs, upper limbs, and lower limbs. For each component, the AdaBoost algorithm is used to build a component detector, and a total of six artificial component detectors are constructed. The so-called body part detector is a two-level classifier, which is a strong classifier obtained by the AdaBoost algorithm.
Construction of action evaluation formula
In this paper, a set of evaluation method of action standard expressed by the mathematical formula is established;
Where θ is one of the eight corner feature vectors, and t (θ) is the DTW difference of the corresponding corner features. b (θ) is the cardinal number of corresponding angle features, f (θ) is the influencing factor of corresponding angle features, and the angle characteristic values are shown in Table 2. s is the full score of the action, and c is the final score of the angle feature. Since eight corner features are selected as the evaluation criteria, the final scores of these eight corner features are added respectively. In the calculation of experimental data, the total score of each angle is 12.5, which is the final score of action evaluation. There are eight angle eigenvectors.
Cardinality and Factor Values
According to the scatter plot of the left elbow, there is only one sampling point in the range of 0–4500 degrees, accounting for 1.5% of the total number of sampling points. In addition, before the data collection, the tennis robot has fully practiced the standard action; only one sample has entered this range. Therefore, the angle curve with the distance difference less than 4500 degrees is the full score, and the angle curve with more than 26000 degrees has only one sample point.
Real time analysis of the system
In the system test, the camera is connected to the client, and the video frame and other data are transmitted through the cable network through a socket. Therefore, real-time experiments are carried out on the server-side and the client-side respectively. The input video is captured by a monocular camera in real time with a frame rate of 50 fps. Five types of tennis actions and each action recognition mode are tested five times. According to the test results in Fig. 1, the average frame rate of the client is 21.64 fps, and that of the server is 22.54 fps, which is lower than the average frame rate of the algorithm real-time experiment. The reason is that the system increases the time consumption of network transmission, encapsulation and unpacking, client drawing, and display. But in the actual observation, it can still meet the real-time requirements in the use process.
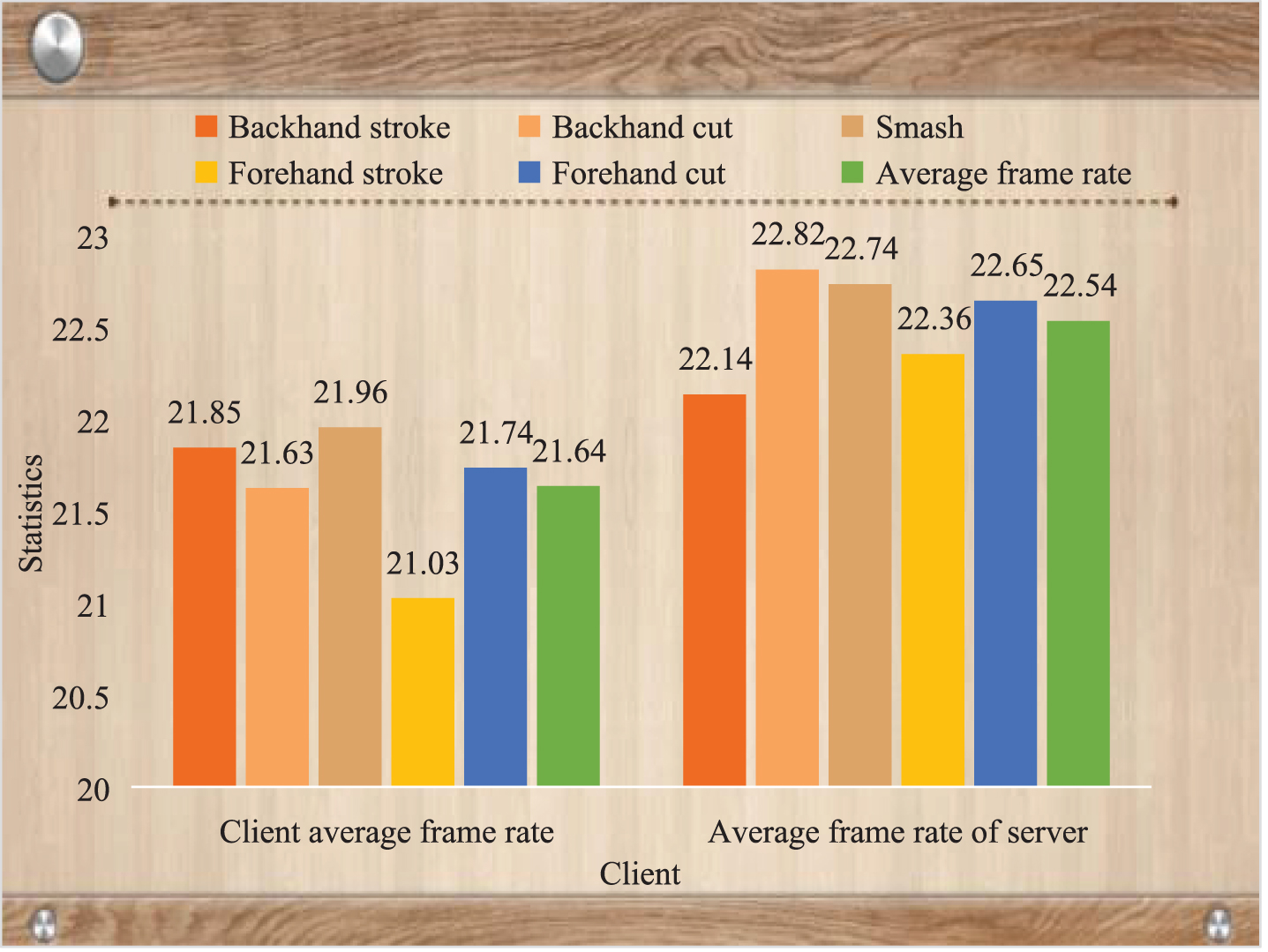
Analysis of system real-time test results.
In this experiment, five people took part in the test. According to the five types of tennis, three groups of simulated movements of each type are tested. The rules are good, general, and bad. Each group is performed five times by five people. Therefore, there were 125 evaluation scores and the average score of each group was calculated. According to the statistical results in Fig. 2, the scores of the backhand stroke, backhand chop, and spike are relatively large, while the scores of forehand stroke and forehand chop are very close, and the difference is very small. The overall test results are ideal, which shows that the system has good accuracy.
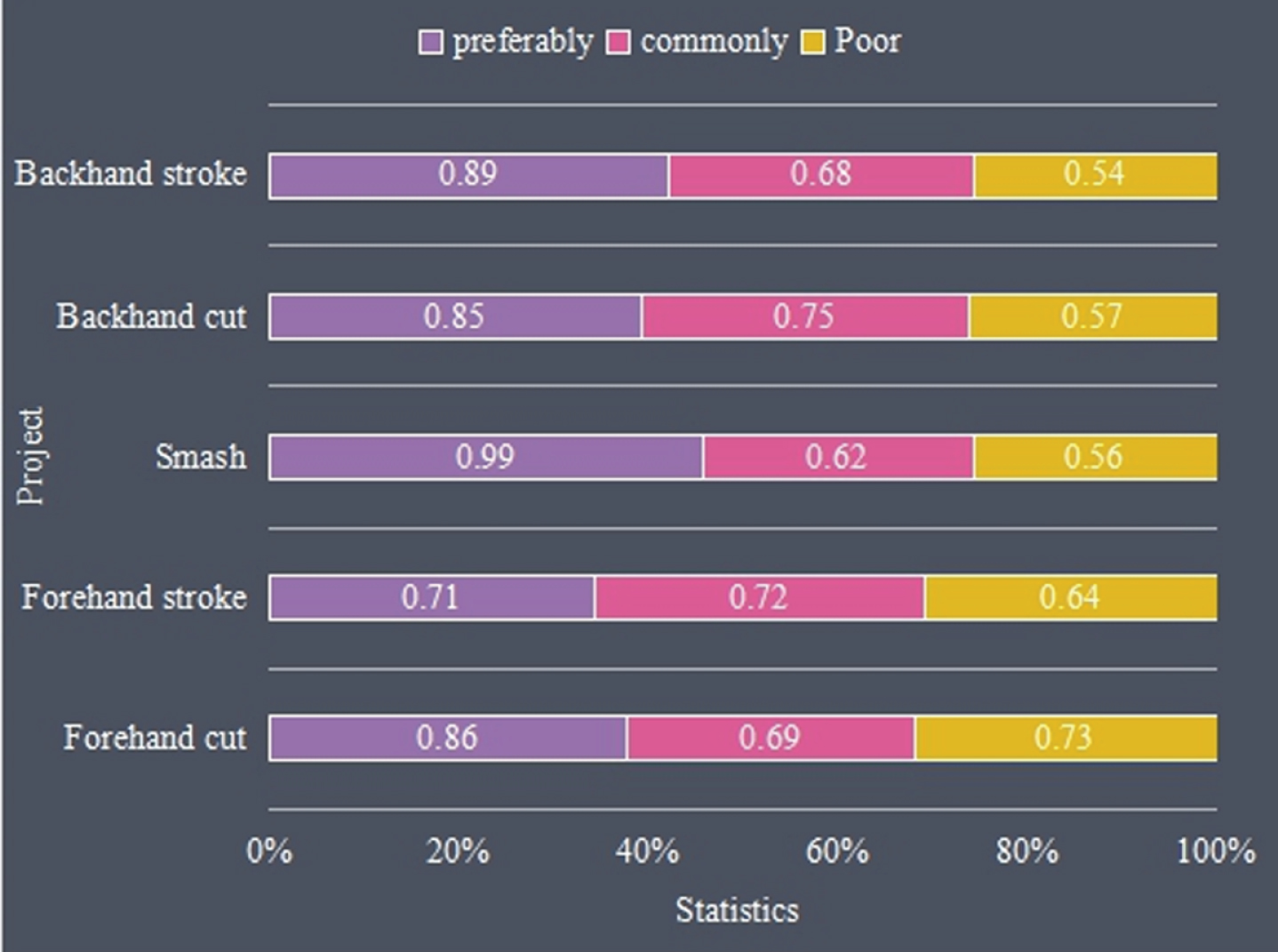
analysis of system accuracy test results.
In the above experiments, the system has carried out 125 action tests, and the number of times the system crashes and stops running without reason is 0. Besides, in the action recognition mode, because the server needs to control the start and end state of the action, the client needs to store the video frame at the beginning of the action, which may cause the program to crash due to insufficient memory. Therefore, the start state time of server action is controlled, and the time length is set to 8 groups, and each group has 10-time length experiments. According to the experimental results in Table 3 and Fig. 3, the number of collisions is 0, indicating that the stability of the system is very good. In all experiments, the GPU memory of the server is maintained at about 1.8 GB, and the memory used by the client is maintained at about 0.3 GB.
Experimental Results of Action Start State Duration Test
Experimental Results of Action Start State Duration Test

Questionnaire Survey Result.
285 tennis players participated in the survey, and none of them took part in the test five times. The satisfaction evaluation was conducted according to their own experience. The evaluation criteria are divided into satisfaction, general, and dissatisfaction. According to the survey results in Fig. 4, the new tennis training robot system developed in this paper has achieved good satisfaction in the test, including 232 people, 81.4% of the players are satisfied, which is greatly improved compared with the traditional tennis training robot.
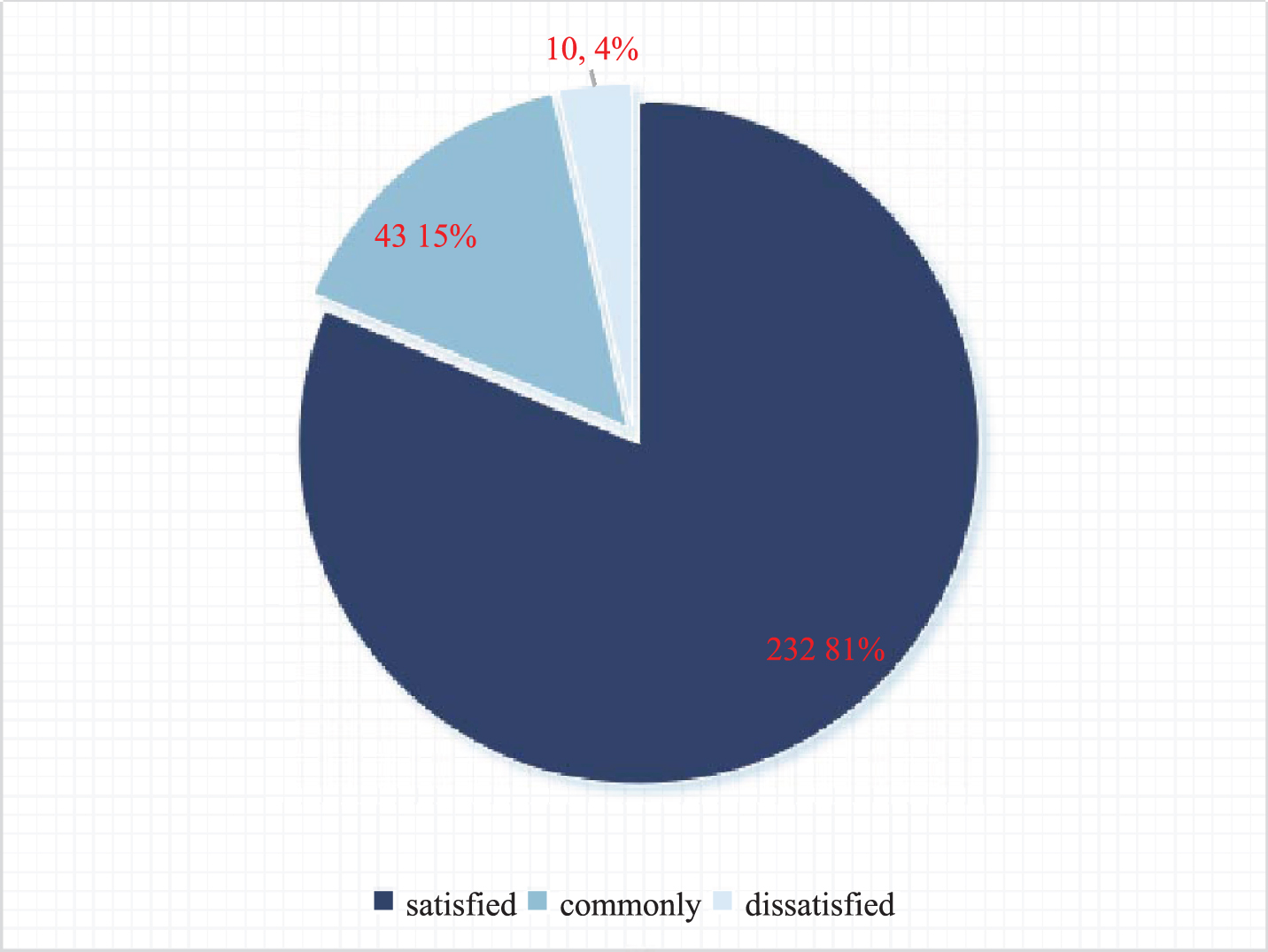
Analysis of test results of the system satisfaction survey.
In recent years, tennis has been developing rapidly, not only in the competitive field has obtained excellent results, but also has been widely popularized in the folk. With the development of tennis, traditional tennis training methods have been optimized and upgraded. With the aid of AIDS is a common strategy in most sports, tennis is no exception. At present, the mainstream is the use of training robots. Due to the limitations of intelligent technology, the existing tennis training robots cannot play a good training effect. In this paper, one of the most important problems in the field of human motion evaluation is the real-time evaluation of human motion. The core of this paper is to optimize the structure of traditional intelligent algorithms by human feature capture and recognition technology combined with kinematics analysis. The optimized algorithm has the advantages of convenient establishment and simple operation. In the fourth chapter, the design principle and specific steps of the optimization method are given in detail. In order to further verify the actual performance of this method, a number of experiments including system stability and real-time performance are carried out.