
Abstract
Using the theoretical knowledge of ergonomics, physiology, and psychology, carried out the humanized design of human body adaptive sports equipment; using the theoretical knowledge of modeling, color, material science and other related disciplines, proposed the human body adaptive sports equipment Humanized design method. Aiming at the fuzziness of the industrial design of human adaptive sports equipment, fuzzy mathematics theory is used as an analysis tool, combined with the actual characteristics of the industrial design of human adaptive sports equipment, focusing on the nature of industrial design under fuzzy theory. Comprehensive analysis and understanding of design-related factors, and the introduction of expert survey method in the case of no basic data source in innovative design, to obtain the weight value of single factor influence, this will help designers grasp the main contradiction, achieve a targeted, and Solve key problems with higher efficiency. Subsequent use of fuzzy mathematics tools to put forward a quantitative index for the selection of options, which will help analyze the pros and cons of the various options, so as to provide a reliable reference for decision makers. This method makes up for the shortcomings of traditional methods in the process of design factor analysis and program selection.
Introduction
The output value of the sports industry accounts for the increasing proportion of the national economy and has become a new growth point for the national economy. The industrial design of sports equipment is an important foundation of my country’s sports industry, and the design of the sports equipment industry has become an important part of the strategy of strengthening the country by sports. At present, my country’s sports equipment industrial design is in a period of development and transformation, facing the opportunities and challenges of independent innovation and upgrading. Among them, the innovation and application of common technologies for sporting goods play a pivotal role, and have fundamental and supporting strategic significance for the realization of independent innovation, upgrading and sustainable development of my country’s sports equipment industrial design.
Based on fuzzy mathematics tools, this paper conducts theoretical exploration, establishes related model analysis methods, and uses this method to conduct project research, practically analyze the related sports equipment industrial design, and use practical demonstration methods to solve related problems in product analysis. And focus on the relevant information and start of the industrial design of sports equipment, integrate the relevant information of various disciplines, and carry out the exploration of innovative ideas with design as the center. Combined with the practice of industrial design of sports equipment, systematic research is carried out based on the concept of specific situations related to badminton enthusiasts, starting with the interaction between consumers, designers, and products. On this basis, integrate design research results centered on badminton special auxiliary exercises in various disciplines, and carry out innovative exploration of design ideas.
Related work
The wind tunnel was used to make precise aerodynamic measurements on track runners. The wind tunnel experiment is the most effective method for this kind of research. Studies have shown that, especially in tandem runs, in the best longitudinal shape, the following runner suffers the least air resistance after the leader [1–3]. In order to reduce the resistance coefficient of speed skaters, the movement research of wind tunnel resistance measurement of speed skaters was carried out [4, 5]. The computer simulation of the frisbee based on wind tunnel test data is studied. The wind tunnel is used to measure the triaxial force and torque of the frisbee. In order to prove the validity of the simulation results, the motion capture system was used to obtain real frisbee kinematics parameters [6, 7]. The aerodynamics of baseball and softball are studied and a series of aerodynamics of baseball and softball are measured. The results show that the resistance coefficient of baseball and softball does not produce obvious resistance crisis within the smooth range of complex joints and their orientation [8, 9]. Studies on the aerodynamic drag of American football show that the drag coefficient of American football is similar to that of other oval balls, such as rugby football and Australian football, which is almost four times higher than usual in the case of crosswinds [10, 11]. The aerodynamic characteristics of the discus were studied, and the aerodynamic forces acting on the horizontal axis of the discus rotation and the horizontal axis of the “non-rotating” discus were measured using the full-size model of the wind tunnel, and the conclusion was drawn that the aerodynamic coefficients of the discus rotation were almost the same [12, 13].
The aerodynamic characteristics and flow characteristics of rotating badminton were studied, and the particle image velocity measurement (PIV) was used to help understand the flow field of the adjacent field at the ball edge in the wind tunnel test. It was concluded that the high aerodynamic resistance of badminton was caused by the spacing of the ball skirt [13, 14]. Studies on the trajectory of baseball’s non-rotating ball show that, contrary to popular belief, the path of the non-rotating ball is as smooth and smooth as that of a normal throw [15, 16]. The wind tunnel test is used to study the aerodynamics of modern football, and the conclusion is that compared with the aerodynamic drag coefficient of eight-plate football, the aerodynamic drag coefficient of the new 32-plate football is closer to that of golf ball [17, 18]. Fuzzy comprehensive evaluation is proposed based on the nonlinear characteristics of the evaluation process. It is a process of quantitative synthesis of the nonlinear evaluation domain according to the fuzzy operation rules in fuzzy mathematics, so as to obtain comparable quantitative evaluation results [19, 20].
Fuzzy mathematics is a branch of mathematics which USES mathematical methods to study and deal with fuzzy phenomena. The so-called fuzziness mainly refers to the “one or the other” nature presented by objective things in the transition between differences [21, 22]. The difference between classical mathematics and fuzzy mathematics is that the set theory of classical mathematics states that a thing belongs or does not belong to a set. Fuzzy mathematics, on the other hand, holds that a thing is a continuous process of change from belonging to a set to not belonging to a set, so things with fuzzy phenomena can change from “1” to “0” [23, 24]. It provides a new way of dealing with uncertainty and imprecision, and is a powerful tool for describing how the brain processes fuzzy information. Since its birth, fuzzy mathematics has been widely applied in the fields of artificial intelligence, psychology, sociology, automatic control, information processing and economic management science [25, 26].
Establishment of fuzzy mathematical optimization model for human adaptive system
Adaptive model of relative superiority degree
Good and bad are a pair of concepts that have both difference and common dimension and are in the two poles with intermediate transition. They are objectively existent fuzzy concepts, which is the fuzziness of optimization and an objective attribute presented by things in the process of distinguishing good from bad. Suppose the system has a theoretical domain U composed of P decisions (schemes), among which M decisions meet the constraint set to form the decision set:
Optimization is carried out in decision set C, that is, the advantages and disadvantages are compared among N decisions in C, and it has nothing to do with decisions outside C, which is the relativity of optimization. Suppose the evaluation target set of decision set C is composed of N targets in the system:
The evaluation of m targets on n decisions can be represented by the target eigenvalue matrix:
Which I = 1, 2.. m; J = 1, 2..n. Systems such as n are called unit systems.
The eigenvalue matrix of the target is transformed into the relative optimal membership matrix of the target by the relative membership degree of the target:
Fuzzy mathematical analysis model for sports equipment design
Considering that the above factors have different influences on the product itself, they are respectively expressed by the weight coefficient, and then the weight fuzzy set is obtained:
For the determination of weight, the expert survey method is commonly used. In the case of the lack of basic data and the fact that the data cannot reflect the reality, and in the exploration of some new science and technology, expert evaluation is often a powerful basis for evaluation.
The method of expert investigation is to evaluate the factors of a problem according to the selected factors, according to their importance, inviting experts to rank. The most important factor is 1, which comes first; the second most important indicator is recorded as 2... N, suppose there are N factors, ask m experts are to sort, the result is an m row n column table of Numbers, the Numbers are 1, 2..., n. The ordinal number in which each factor ranks is called the “rank” of that factor. Add up the “ranks” assessed by m experts on this factor to obtain the “rank sum” of this factor. The rank sum of the J factor is expressed in terms of aid. If Tj is used to represent the weight of the J factor, then the formula for calculating the weight is:
According to the target evaluation requirements, five levels can be used to describe the state of each factor, such as: high, high, general, low and bottom. Thus, the evaluation set can be obtained:
Thus, the programme evaluation questionnaire is obtained, as shown in Table 1:
Programme Evaluation Questionnaire
In this survey, five manufacturers (ML-M5), three sales managers (M6-M8) and two engineers (M9-M10) rank the above eight factors for the industrial design of sports equipment. The most important ones are ranked first, followed by the next. Finally, preliminary weighted statistical data are formed, as shown in Table 2:
Weighted statistics
The kinematic fuzzy mathematical analysis model of the human body series mechanism is based on the inverse kinematic solution of the given end pose, which is generally used for the fixed point movement of the positioning pose. But for continuous trajectory tracking, and general manipulator trajectory planning is different, because this article design of kinematics analysis of fuzzy mathematics model is composed of two to three degrees of freedom parallel mechanism in series, the end of the Spaces “location” and “posture” are highly coupled, not in a given location track at the end of the case, the end of the match expected continuous gesture trajectory, also indirectly lead to joint space trajectory of discontinuity and uncertainty, thus making the joint space trajectory planning has a certain complexity. Therefore, this section through genetic algorithm carries on the imitation of human body kinematics trajectory planning of fuzzy mathematical analysis model, the path curve at a given location, generate the joint space Angle curve of smooth and continuous, guarantee institutions end gently steadily in the process of location tracking movement to end from the starting position, ensure smooth gesture at the end of the curve smooth, as shown in Fig. 1.
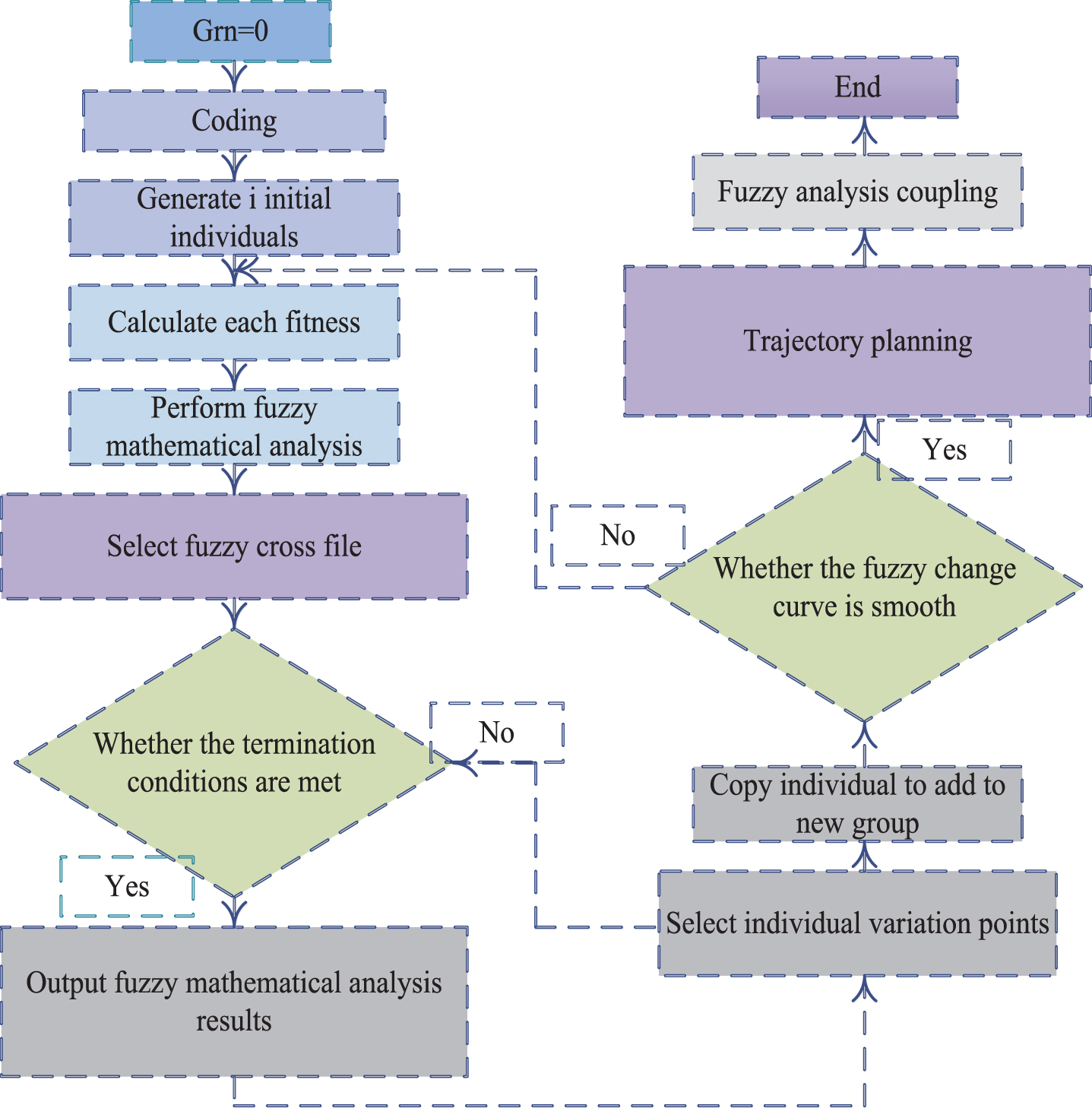
Flow chart of fuzzy mathematical analysis model of human kinematics.
It can also be seen from Fig. 2 that although the trajectory curves of each joint are relatively continuous, there is still some jitter in the joint planning curve, and the jitter frequency is relatively high. However, the motion of the fuzzy mathematical analysis of human kinematics should be smooth and continuous, and the unsteady motion will lead to the vibration and impact of the industrial design of sports equipment.
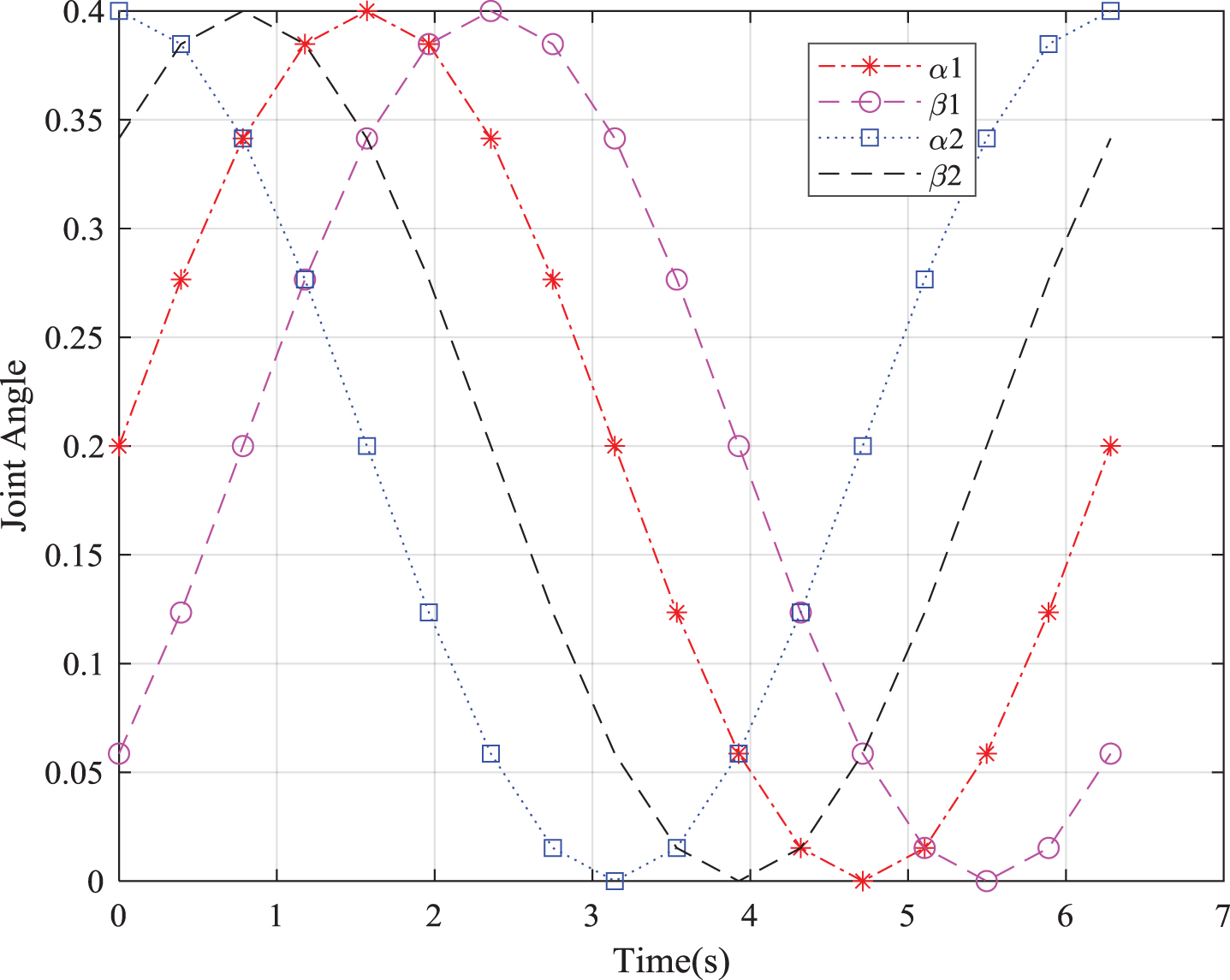
Pose trajectory planning curve of each joint.
Humanized design of adaptive sports equipment is under the guidance of the principles of ergonomics, discusses various features and applications, and through the shape, color, function, material elements such as design of adaptive outdoor sports equipment industry, ensure that the design can meet the user’s physiological and psychological needs, create a good human-computer interaction relations, reflects the attention to human needs.
The naturalness of people mainly considers the relationship between people and things. Therefore, the following aspects should be considered in humanized design: 1) Design more and better product functions to reduce the intensity of human labor physiological structure design, and actively create time for people to return to nature and themselves; According to the human behavior law, 2) adapt to human physiological requirements and human size, reflect human instinct to create a good interface and living space, promote human development towards a positive and healthy direction, reduce work and life diseases caused by improper design, and care for all mankind. The size of human body and the weight of all kinds of people vary in different countries and regions, so the design of adaptive sports equipment industry also differs in size and bearing capacity. In addition, the range of motion of each limb and its related parts of the human body is different; The sense of movement and rhythm varies from person to person; The strength of the body and the power of each part of the body vary according to the population, age and so on; The diversity of human’s sports physiology, perceptual physiology, psychology and its reaction characteristics is also the main content of the consideration of using the object “human”.
Although the industrial design of adaptive sports equipment has a strong ability of kinematics and dynamics simulation analysis, the modeling function is relatively weak, so only a simple model can be established. For models with complex configurations, other 3D modeling software is needed. In this paper, the imitation of the principle of fuzzy mathematics model of configuration is complex, difficult to directly on the adaptive sports equipment industrial design modeling, we on UG to physical modeling agency, and then import in Parasolid format to adaptive simulation analysis in the design of sports equipment industry, the imitation of the principle of fuzzy mathematics model is set up adaptive sports equipment industrial design structure model is shown in Fig. 3. In order to ensure that the virtual prototype has similar physical characteristics with the physical prototype, we need to edit and define the quality, material, moment of inertia and other attributes of each part according to the design of the mechanism in the adaptive sports equipment industrial design. To facilitate the organization of the kinematics and dynamics analysis, we need to identify the relationship of constraints between components and drive mechanism, such as ball hinge joints is defined as a 3-dof rotating parts constraint, pneumatic muscle is defined as a mobile constraint definition, bracket and ground between fixed constraint, etc., to ensure that the parts when the model simulation can be carried out in accordance with the expectation right movement.

Block diagram of structural model of adaptive sports equipment industrial design.
In the evaluation system, the importance of each index in the whole evaluation system is different, and most of them are fuzzy. Only when their relative weights are determined, it is possible to carry out an objective comprehensive evaluation. This system USES the analytic hierarchy process to process the survey results and work out the weight of each index. Future research issues are the main content of the analytic hierarchy process contain various factors according to certain related subordinate relations are divided into several levels, using certain mathematical method to calculate and study the degree of the relative importance of each level factors and weight value, finally in measuring value from high to low from primary and secondary order to analyze the connotation of the essence to solve the problem of the center. On this basis, this study consulted some experts, modified the weight distribution, and finally determined the weight coefficient, as shown in Table 3.
Safety evaluation index and weight of sports equipment design
For each U, a single level fuzzy comprehensive evaluation is carried out, and a single factor fuzzy evaluation matrix is established. In order to reflect the safety of sports equipment industry design, different indexes are evaluated by different methods. For example, the “sports environment” of a school can be evaluated by on-site inspection. From the site area, flatness, quality and venue light, equipment and facilities safety aspects of the evaluation. The fuzzy set of the motion environment of the school is calculated according to the results of each evaluator. If the results of l0 judges on the sports environment of the school were:2 rated excellent, 6 rated good, 2 rated medium, and no one rated average or unqualified, then the fuzzy set of the sports environment of the school was (0.3, 0.5, 0.3). Similarly, the fuzzy set of indicators of sports safety education and inspection, sports-related systems, medical supervision, physical education teacher team construction and number of students can be obtained. Then, the fuzzy evaluation matrix of the indicators of safety factors in the industrial design of sports equipment is:
Dynamic research is the foundation of the research on the design and control of sports equipment industry. In the structural design and control algorithm research of sports equipment industry, the dynamic model of the design mechanism of sports equipment industry needs to be considered. It can fully describe the force and motion relationship of the design system of sports equipment industry. Pneumatic muscle imitation human upper arm is essentially composed of two 3-DOF parallel mechanism in series. For the motion control of the manipulator, we must go deep into the mechanical problems, which are mainly divided into the kinetic forward problem and the kinetic inverse problem. For the real-time control, we need to study the kinetic inverse problem. Aiming at the joint system imitating the upper arm of human body in this paper, the required driving torque of the joint should be calculated according to the known attitude variation of the joint, so as to figure out the force to be provided by each pneumatic artificial muscle.
PD controller is the simplest control algorithm in the industrial design of sports equipment. PD linear feedback control law is used independently for each joint to ensure progressive stability and good dynamic characteristics. It is widely used in the industrial design control of sports equipment. According to the deviation between expected value and output feedback value, proportional derivative is combined to control the mechanism in a linear way. Where, Kp is proportional gain, and K is differential gain. The proportional link reflects the deviation signal of the system. Once the deviation occurs in the system, the proportional link immediately produces the adjustment effect to reduce the deviation. The differential link reflects the rate of change of the deviation signal of the system, and the dynamic performance of the system is improved by inhibiting the variation of the deviation in any direction in response to the magnitude of the rate of change of the deviation. Foresees the trend of deviation change, gives the corresponding adjustment action in advance, therefore can produce the leading control effect, thus shortens the adjustment time.
According to the calculated torque control method, a PD controller is designed in the internal control loop of the manipulator joint:
Let the expected trajectory be Q, and on this basis PD control is introduced, which can be expressed as follows:
The most important feature of fuzzy control is to reflect people’s experience and reasoning rules, such as “water temperature rises too fast, air valve”. Fuzzy control mainly USES computer to simulate human thinking and decision making experience, and it is simple and effective to operate the complex system, although it is subjective to a certain extent. As a kind of intelligent control and a high order product of the development of control theory, fuzzy control is mainly used to solve the control problems of nonlinear and model-uncertain complex systems that are difficult to be solved by traditional control methods, or control systems with complex task requirements.
Pneumatic artificial muscle imitation human upper arm system is a typical nonlinear and time-varying control system, but there is some model uncertainty. In order to obtain a better control effect, PD parameters in the internal loop of the torque method can be adjusted online in real time by the fuzzy controller. Fuzzy control has a transformation process of precise fuzzy and precise fuzzy, which mainly includes four parts: variable definition, fuzzy, rule base, fuzzy reasoning and fuzzy defuzzification:
(1) Variable definition:
For the manipulator joint control designed in this paper, it is necessary to define the language variables of input and output of the controller. The input variables of the control problem have the system error and error change rate, and the output variables are the changes of proportional and differential parameters.
(2) Fuzzy:
The process of converting an exact quantity to a fuzzy quantity is called fuzzification, which is the process of converting a certain value of an input quantity to a value of a fuzzy language variable.
(3) De-fuzzification:
As an important step in fuzzy reasoning, de-fuzzification is the process of transforming fuzzy values obtained in fuzzy reasoning into accurate signal control values. There are many ways to solve the fuzziness. In this paper, area-center-of-gravity method is used to eliminate the fuzziness, and the precise output of the fuzzy controller is defined as the central abscissa of the area bounded by the membership function curve and the abscissa. The fuzzy output obtained by fuzzy reasoning is converted into precise value, and the internal control loop of the computational torque method is improved and adjusted to realize accurate control of the manipulator.
Based on the kinematics and dynamics model of the manipulator, the variation of the length and output force of each artificial muscle was observed by numerical simulation on MATLAB. The motion trajectories of scapula joints were given respectively, and the simulation time was 8 s. Using the kinematics and dynamics models of the scapular-joint platform and the joint platform, the variation curves of the length of the artificial muscle and the output force can be obtained, as shown in Figs. 4 and 5. The length of the pneumatic artificial muscle in the figure includes the fixed length of the two segments of the pneumatic muscle and the length of the wire rope stretching state. It can be seen from Fig. 5 that the output force of pneumatic artificial muscle is positive and negative. When the value is positive, it means that the pneumatic artificial muscle exerts force on the platform during the stretching process. On the contrary, pneumatic artificial muscles exert a force on the platform during the contraction process. In addition, the curves of length and output force are smooth, indicating that there is no singular position in the motion process.
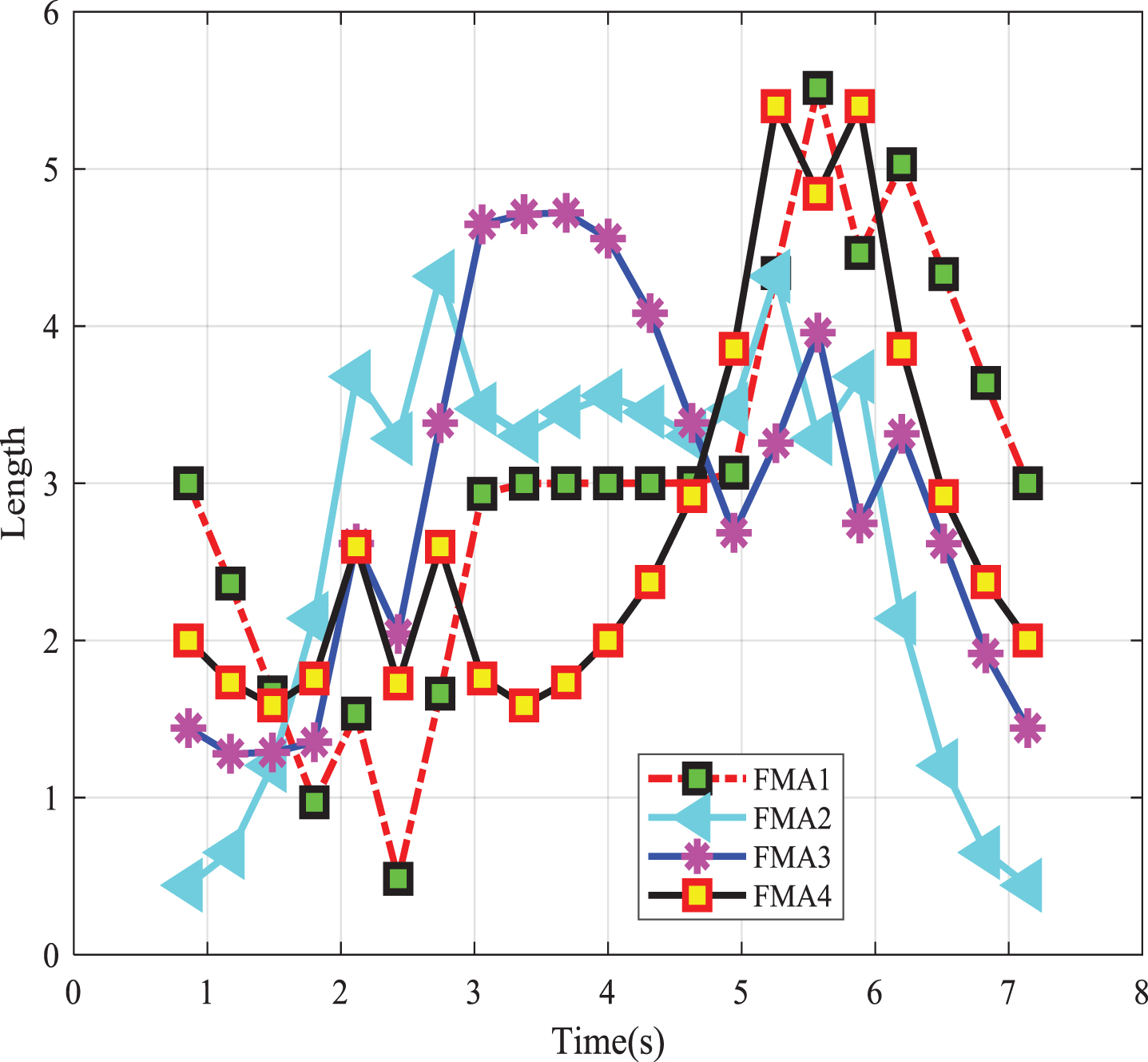
Change curve of aerodynamic muscle length.

Change curve of aerodynamic muscle output force.
The robot arm pose step response was simulated, and MATLAB was combined with the fuzzy mathematical model of adaptive sports equipment industrial design, as shown in Figs. 6 and 7. The step response position tracking data and its simulation graphics can be obtained.
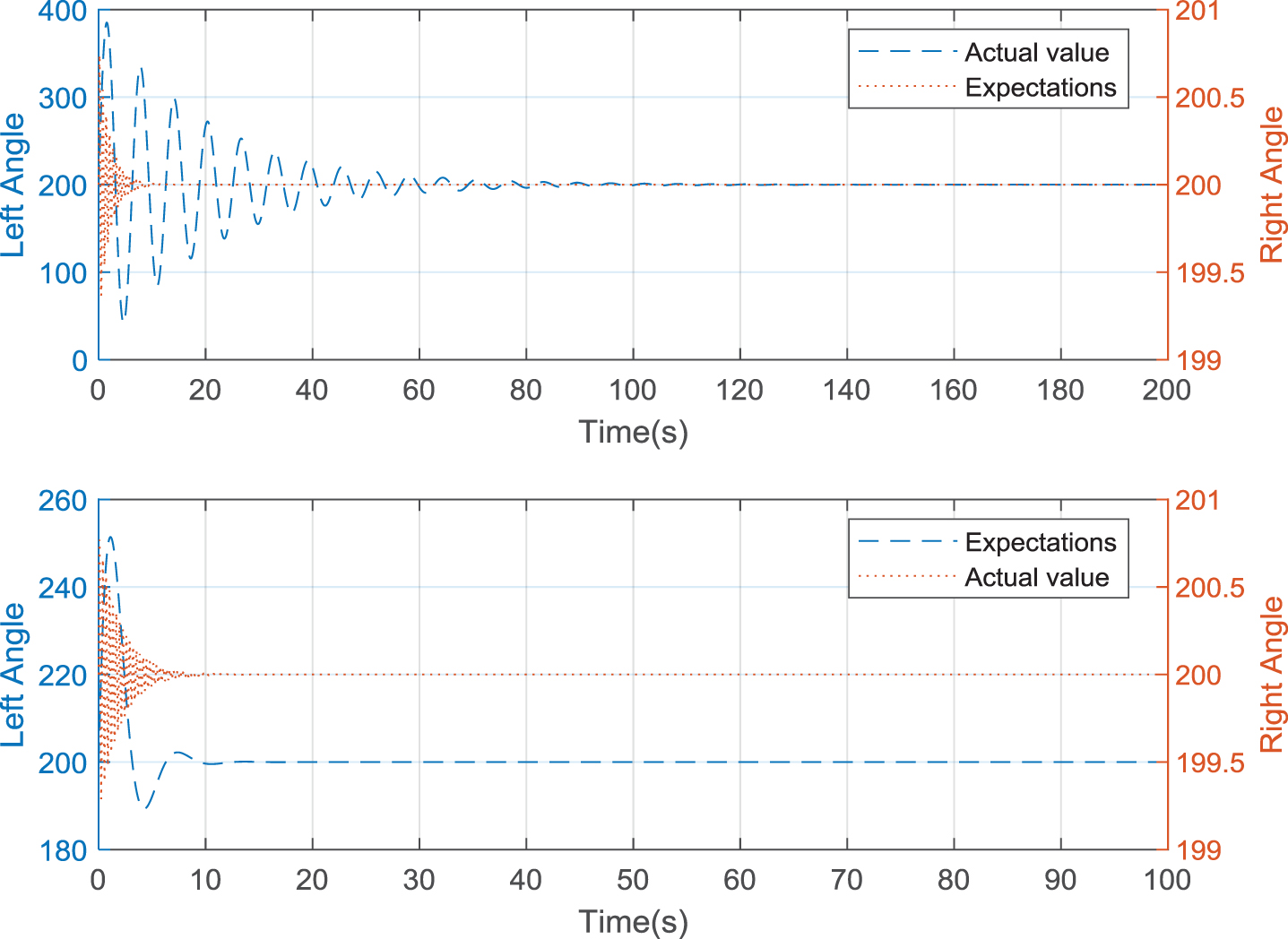
Fixed-point control of PD at the scapula joint.
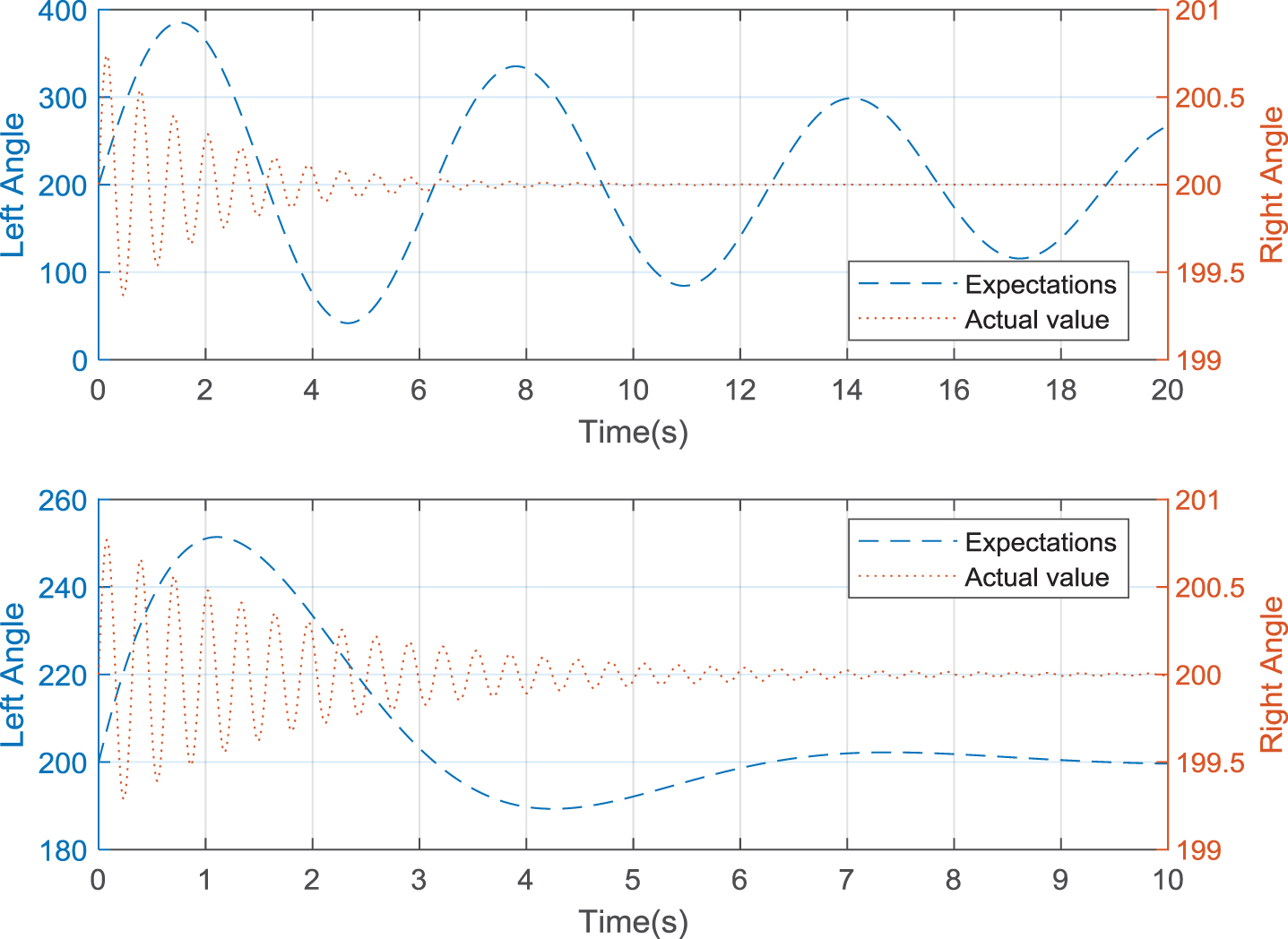
Fixed point control of joint PD.
According to Fig. 6, the adjustment time of scapula joint was 1.5 s, 2 S, and 2.5 s, respectively (with a steady-state value error of 2.5%). According to Fig. 7, the adjustment time of the joint is 5 s, 5.2 s and 6.2 s respectively (with a steadystate value of 2% error). It can be seen that under the action of the independent PD controller, the adjustment time of the system is greatly shortened and the system has a good dynamic performance. Considering our manipulator control system is a typical time-varying system, with the change of the trajectory of the system in the process of control parameters are also changing, separate PD control for the fixed-point motion of the mechanical arm control may be useful, but for the trajectory tracking motion control can not obtain the desired effect, can only be reference analysis as the foundation. In order to make the manipulator move accurately according to the predetermined trajectory in the operating space, the trajectory tracking control method of the manipulator is studied.
At the same time, the motion of each direction of the joint (or scapula joint) is given in the simulation model, and the control effect of the torque method is analyzed and calculated. The simulation studies below take the same approach. First of all, the proportional differential parameters in the internal control loop of the scapula joint method are calculated. Through the joint simulation of MATLAB and the fuzzy mathematical model of adaptive sports equipment industrial design, the simulation figure of the position tracking and error of the shoulder and foot bone joint calculated by the torque control is shown in Fig. 8:

Control simulation of joint calculation torque method.
Using fuzzy mathematics theory as the analysis tool of industrial design method, this paper studies the fuzzy theory of the essence of industrial design, well in combination with the practical features of sports equipment industrial design itself, the understanding of the comprehensive analysis of relevant factors, the appearance, shape, cost control, and the parties the relationship between various factors are analyzed, for the understanding of the overall design play a key role, especially in the crucial point in the analysis of many factors, the design and analysis of main contradictions, made it a target, and using the weighted values make reference to plan optimization, and improve efficiency. Traditional probability analysis method in the process of specific design on the results of the analysis of various factors reliability is low, probability analysis result has a certain absolute, that in the absolute limit the spread of design thinking, design method and fuzzy solution is the relativity between the various factors, the factor analysis results, specific to the fuzziness of “design” itself, make up for the deficiency of the traditional method. This paper breaks through the traditional analysis method of design, applies the relevant philosophical thought and analysis method of “fuzziness” to the industrial design industry, and evaluates the scheme optimization by using the relevant analysis tool of fuzzy mathematics, which has a certain new idea. Through the examples of relevant examples, the analysis results of the fuzzy design method in this paper are basically consistent with the empirical values, which also shows that this method has a high accuracy in industrial design, and the results have a high reliability.
Footnotes
Acknowledgments
This study was funded by 2016 Science and Technology Development Guiding Project of Bengbu (Fund no.:20160329).