
Abstract
Iterative Learning Control is a branch of intelligent control which combines artificial intelligence and control theory. This objective of this study aims at reducing the cyclic error of an inverse ball screw transmission system by using iterative learning control approach. Firstly, kinematic and dynamic analyses are conducted by using the vectorial loop closure and Lagrange equations, respectively. Then, system identification is performed followed by controller design. Moreover, controller parameters are optimized to minimize the error. Finally, the feasibility and the effectiveness of the proposed approach are verified by computer simulation and prototype experiment. The experimental results showed that the reducing percentage of the square error sum of the output speed is 90.64% by using PID control only. If ILC is applied additionally, the error is further reduced to 94.21%. Therefore, the proposed approach is not only feasible and but also effective.
Introduction
With the advantages of its low friction, high precision, and longer service, ball screws are widely used in various kind of precision or automatic machinery. Ball screws are mechanisms which converting motion between rotation and rectilinear motion by direct contact. It mainly consists of a screw, a cap, and balls circulating between the former two, as shown in Fig. 1 [1].
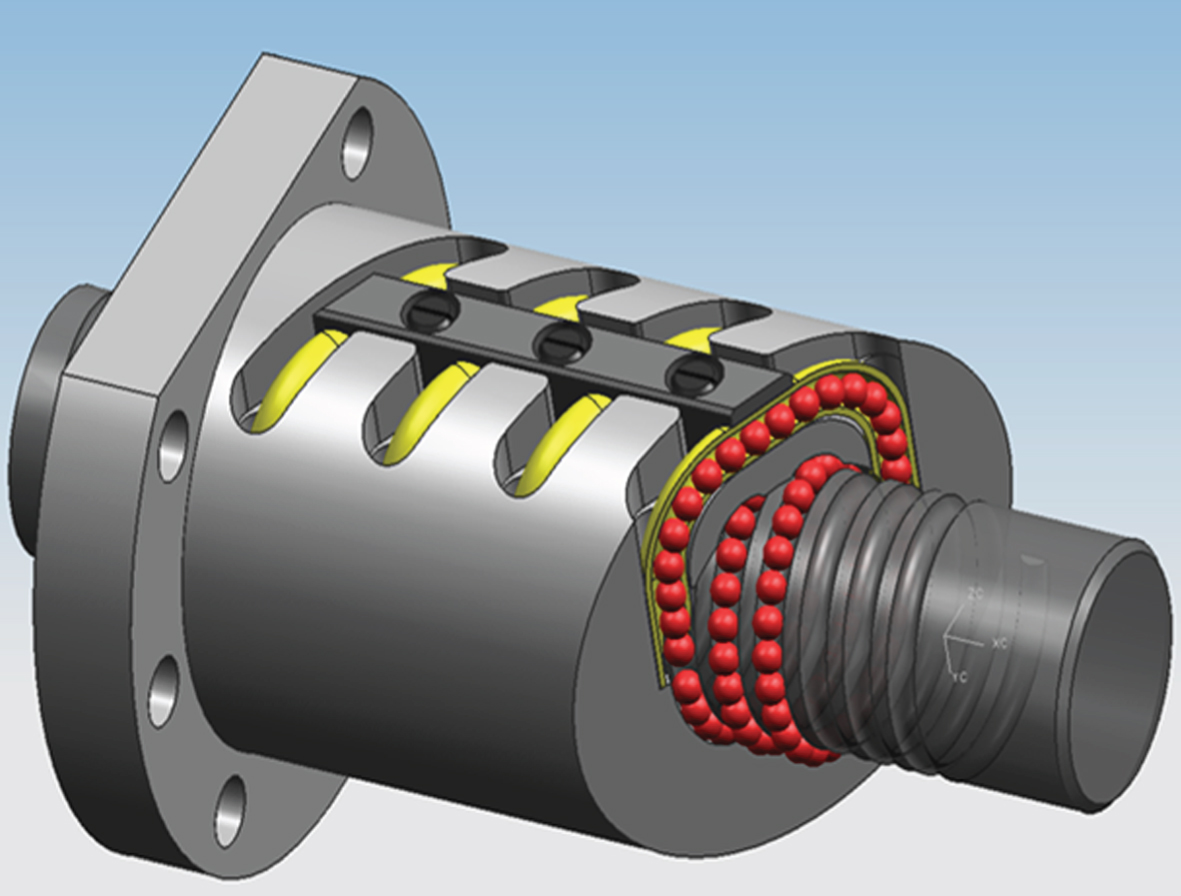
Ball screw [1].
Typical applications of ball screws are power steering [2], machine tool feed drives [3, 4], precision positioning stage [5], etc., which convert rotatory motion into rectilinear motion. However, an ever increasing demand is to convert rectilinear motion into rotatory motion, e.g., energy harvesters [6, 7] and regenerative shock absorbers [8, 9]. These ball screws are called inverse ball screws in this study, i.e., the cap is the driver that produces rectilinear motion, and then drives the screw to generate rotatory motion. Nevertheless, precision control studies on this topic are hardly found. In 2014, Hsieh & Chang [1] established the system model of an inverse ball screw system, and performed a refined control to enhance its output accuracy.
Iterative Learning Control (ILC) has been well developed in the past. In 1978, Uchiyama [10] firstly proposed the concept of iterative learning to improve the motion trajectory of robots at high speed. In 1984, Arimoto et al. [11] proposed a simple PID-type learning algorithm, which ensured the convergence of the learning system under certain conditions. In 2008, Madady [12] proposed an optimum design approach for determining the PID coefficients which ensure the convergence of the learning system. ILC has been applied in various applications, e.g., motor control [13–15], robots [16–18], machine tools [19, 20].
This objective of this study aims at reducing the cyclic error of an inverse ball screw transmission system by using iterative learning control approach, hence it can produce output motions with high accuracy. In the following sections, Sec. 2 introduces the composition of the system along with its kinematic and dynamic analyses. Sec. 3 presents the approach of hybrid control. An illustrative design example is given in Sec. 4. Sec. 5 conducts prototype experiments. Finally, major conclusions are summarized in Sec. 6.
The inverse ball screw system proposed in [1] consists of a motor with a gear reducer (not shown), a variable speed coupling, a slider-crank mechanism, and a ball screw, as shown in Fig. 2. The slider-crank mechanism is driven by the motor through a generalized Oldham coupling, and then it drive the ball screw to produce a non-uniform rotational output.
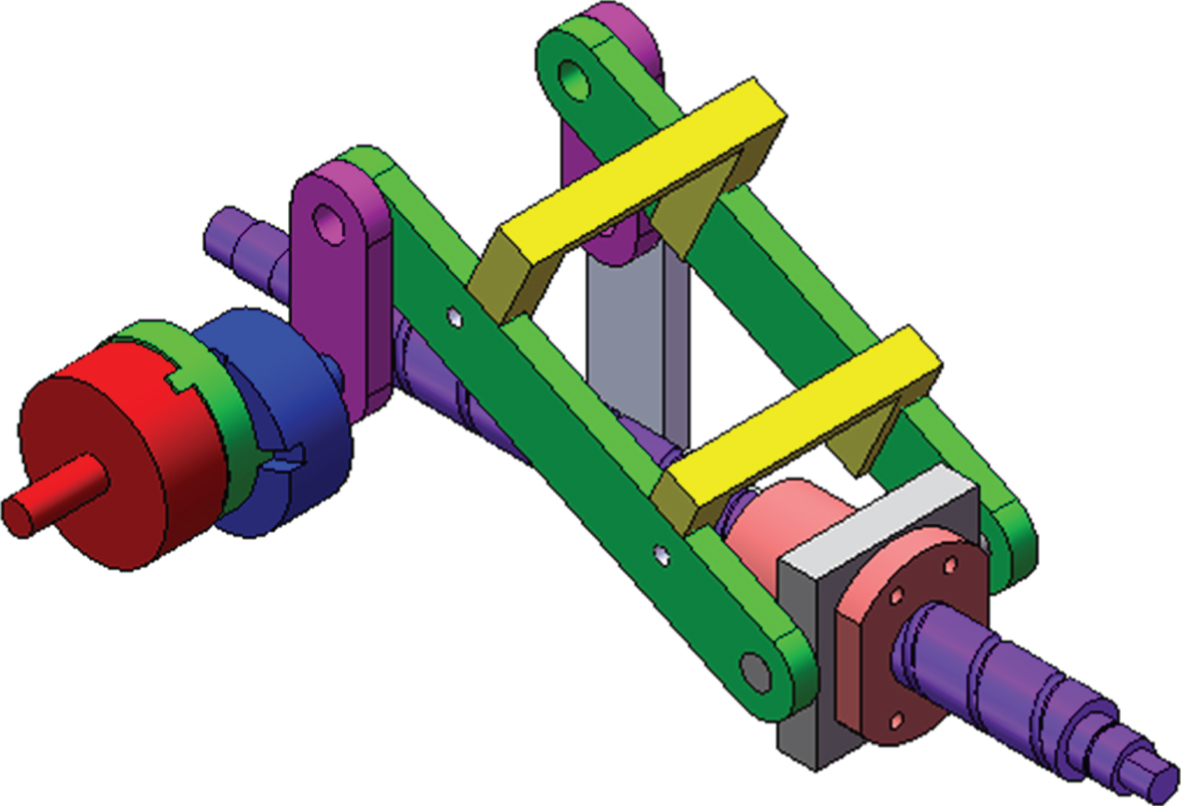
Inverse ball screw system [1].
A generalized coupling can be, kinematically equivalent, converted into a four-bar linkage [21–23]. To modelling the system dynamic, kinematic and dynamic analyses have to be conducted firstly. The vector closure approach is used for the analyses in this study. Therefore, the proposed system is firstly transformed into its equivalent linkage, as shown in Fig. 3. Its associated vectorial representation is shown in Fig. 4 where ϕ is the angular position of the screw For simplification, the line connected fixed pivots a0b0 is then assumed to be parallel with t the slider’s motion. Finally, it can be found that it is a planar linkage with 6 links and 7 joints, the ball screw is not considered in the analysis.

Equivalent mechanism [24].

Vectorial representation [24].
The details of the kinematic analysis can be found in [24], and will be repeated here. The angular position is
To establish a system model, it is required to perform dynamic analysis to obtain its equation of motion. In this study, the Lagrange equation approach is used for the analysis. Figure 5 shows the dimensions of the mechanism. Let Gi = (xi, yi), i = 1–3, be the mass center of the link i, it yields
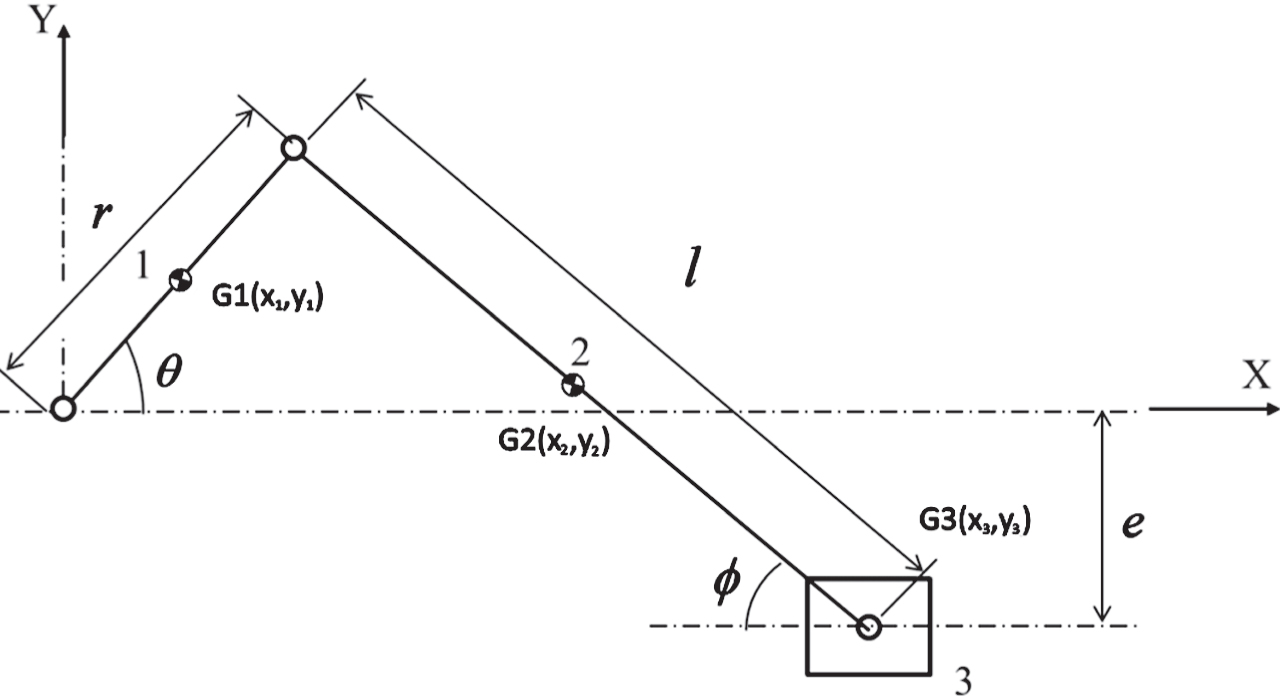
Dimensions.
The kinematic energy Ti (i = 1-3) of each link can be expressed as
Then, the total energy of the mechanism can be obtained by
Similarly, the potential energy Vi (i = 1-3) of each link can be expressed as
Then, the total energy of the mechanism can be obtained by
From Fig. 5, the constrained equation is set as
The Lagrange equation can be expressed as [25].
Substituting Equations (10) and (14) into Equation (17), it yields
Substituting Equation (18) into Equation (16), we have
and
PID control is an effective approach to eliminate the on-line errors between the outputs of the expected and the real. However it cannot reduce the cyclic errors of the system. Therefore, a hybrid control which integrates PID and ILC is employed in this study.
PID control
A PID controller employed three parameters, i.e., the proportional gain(K
p
), the integration gain (T
i
), the derivative gain (T
d
), to control the system output. It is usually implemented as follows:
Taking Laplace transform with respect to Equation (23), the transfer function of the controller G
c
(s) can then be found as
A refined PID controller was proposed by Astrom & Hagglund [26], the noise filtering constant N and the a set-point weighting factor b are added into the PID controller to limit the amplification of high-frequency measuring noise, and increase the flexibility of adjusting, respectively. Figure 6 shows the block diagram of a closed-loop system with a refined PID controller. The transfer function can be expressed as
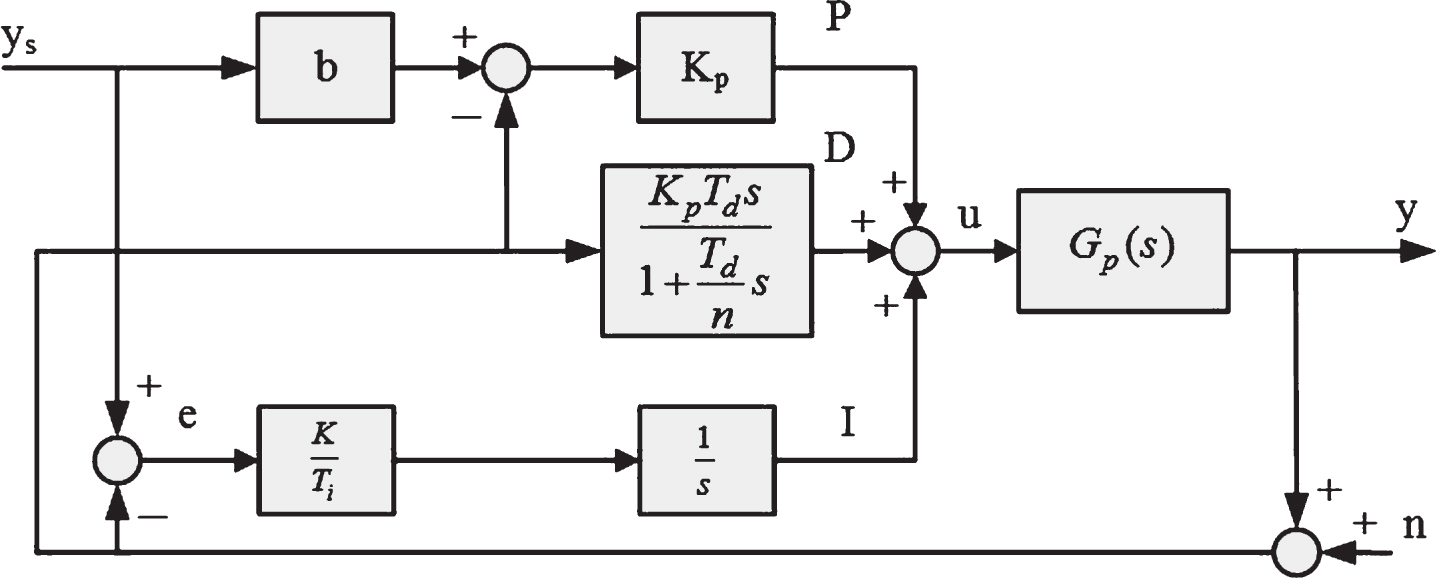
Refined PID Control.
Iterative Learning Control (ILC) combines artificial intelligence and control theory to create a controller with learning ability. Compared with traditional controllers, ILC does not require a complete dynamic model of the system, and it can also adapt well to variations in the environment.
It is a good method of tracking control for a system which works in a repetitive mode. Repetition (iteration) allows the system to reduce tracking error from repetition to repetition, and the required input needed to track the reference exactly. Figure 7 depicts a typical ILC block diagram, the control law can then be expressed as
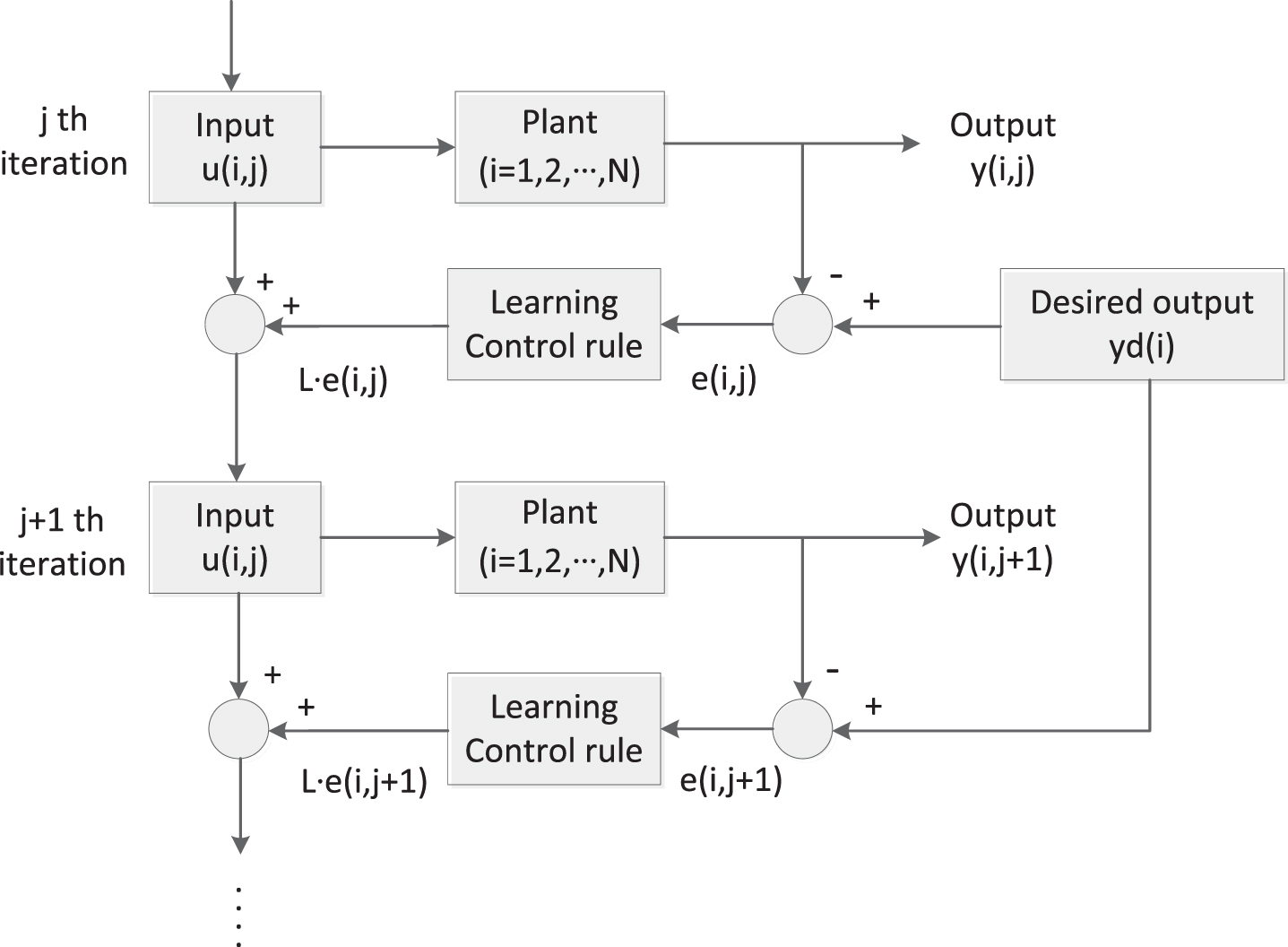
ILC block diagram.
A linear, time invariant, and discrete time system, can be expressed by
There are various types of learning gains, one of them is the PID type [11, 12] which is widely used, and can be formulated as:
and
The optimal gains of k p , k i , and k d are obtained by using the approach proposed by Madady [12]. The proposed procedure is outlined below.
From Equation (28), the following equation is easily obtained as
where U(j) and Y(j) are the input and output vectors, respectively, in iteration j, and can be expressed as
Also, let H matrix be
Then
The optimal parameters of the PID type ILC controller can be obtained as
Finally, the sufficient condition for monotonic convergence is
The system model is found by the system indentification experiment, and can be expressed by
The inertial and dimensional parameters of the system is tabulated in Table 1. By substituting all the parameters into Equation (19), and set the nonlinear terms as f(t), it yields
Inertial and dimensional parameters
Where
To simplify the system model, the time varying parameter M(θ) is replaced by its average value of one revolution, i.e., 1.591. Equation (46) can be simplified as
Let state variables(x1, x2) be
Then followed by substituting the parameters in Table 1 to Equation (19), the state equation of the system can be expressed as
Substituting all the knowns and founds to Equation (37), the standard Markov parameters of the system can be obtained as
where M is set as 1000 by trial and error. Substituting Equation (50) into Equation (38), it yields
Substituting Equations (50) and (53) into Equation (40), the optimal parameters can then be obtained as
By substituting k*, g1 and hi (i = 1∼6) into Equation (41), we have
Therefore, the monotonic convergence of the system is also assured.
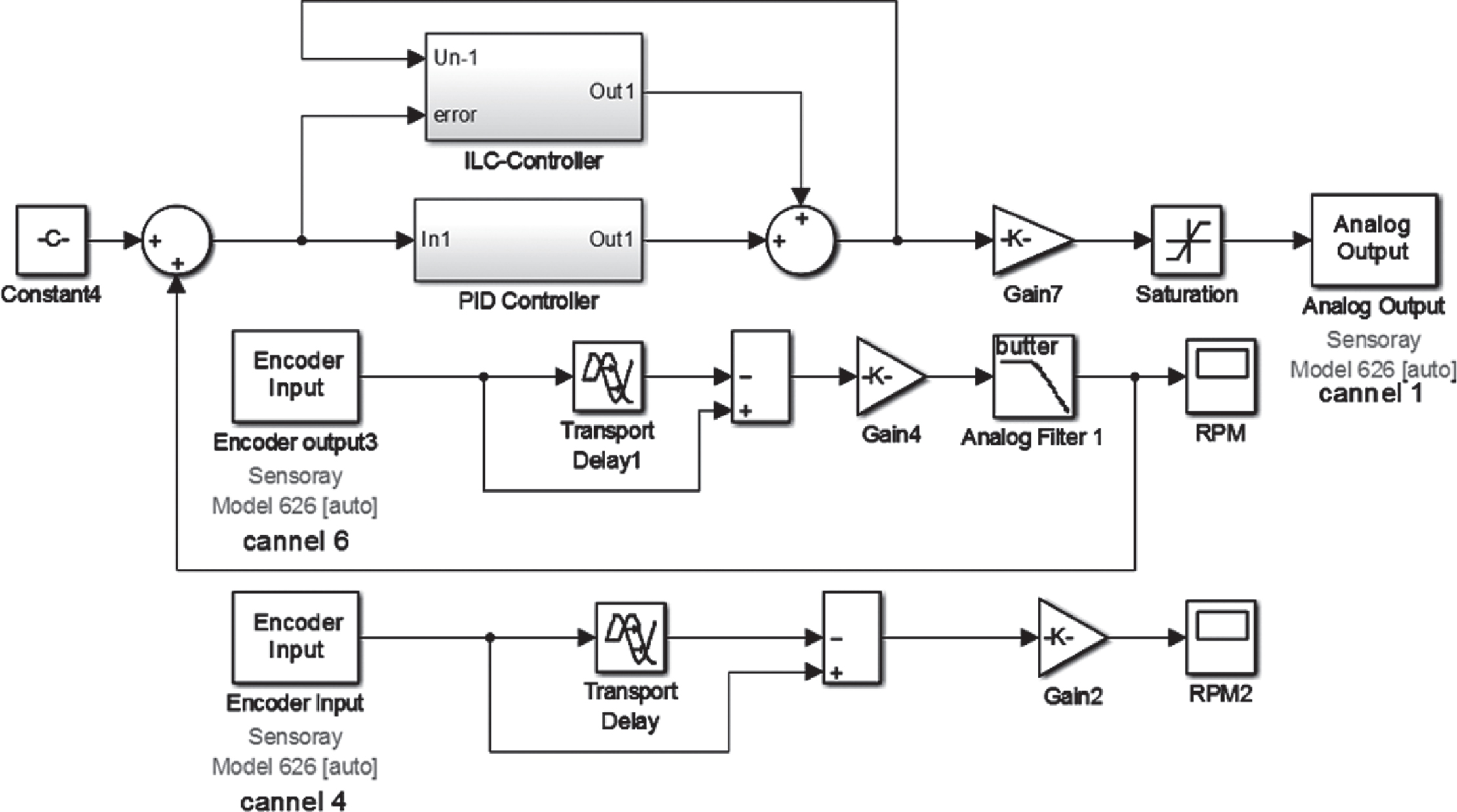
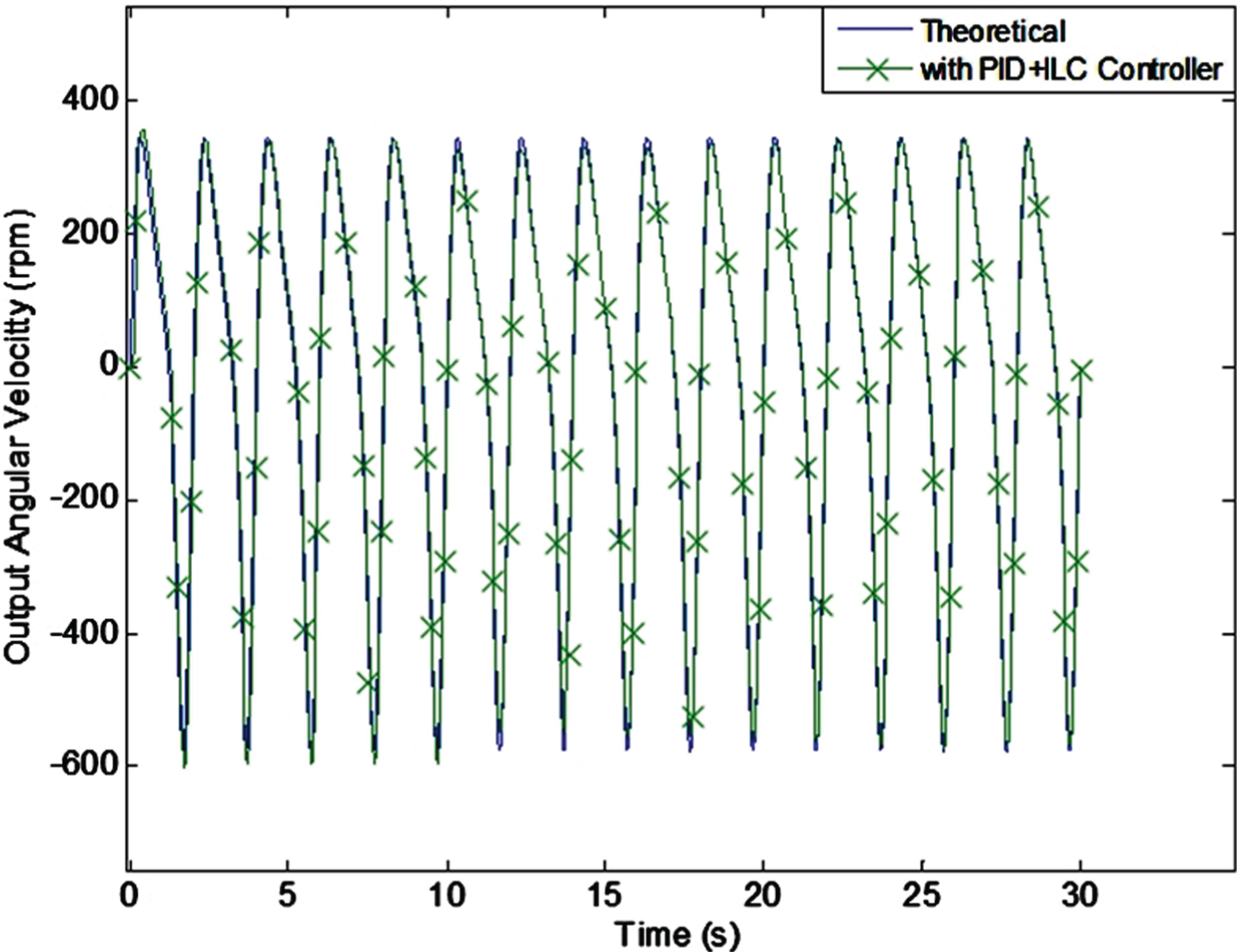
The design is simulated by using Simulink, Fig. 8 depicts the block diagram of the system, and the program is shown in Fig. 9. To verify the effectiveness of the design, the simulated result of the system with the hybrid controller is compared with the ones of the theoretical and with PID controller. Fig. 10 shows the output angular velocities during 0–30 secs with input angular velocity at 30 rpm, and the first two cycles are also depicted in Fig. 11, it can be found that the hybrid controller has significantly improved the tracking accuracy of the output in the first two cycles. In the 15th cycle, the output of the hybrid controller is almost coincident with the theoretical one, show in Fig. 12. The errors are presented in Table 2. The tracking accuracy of using the hybrid controller is better than that using the PID controller.
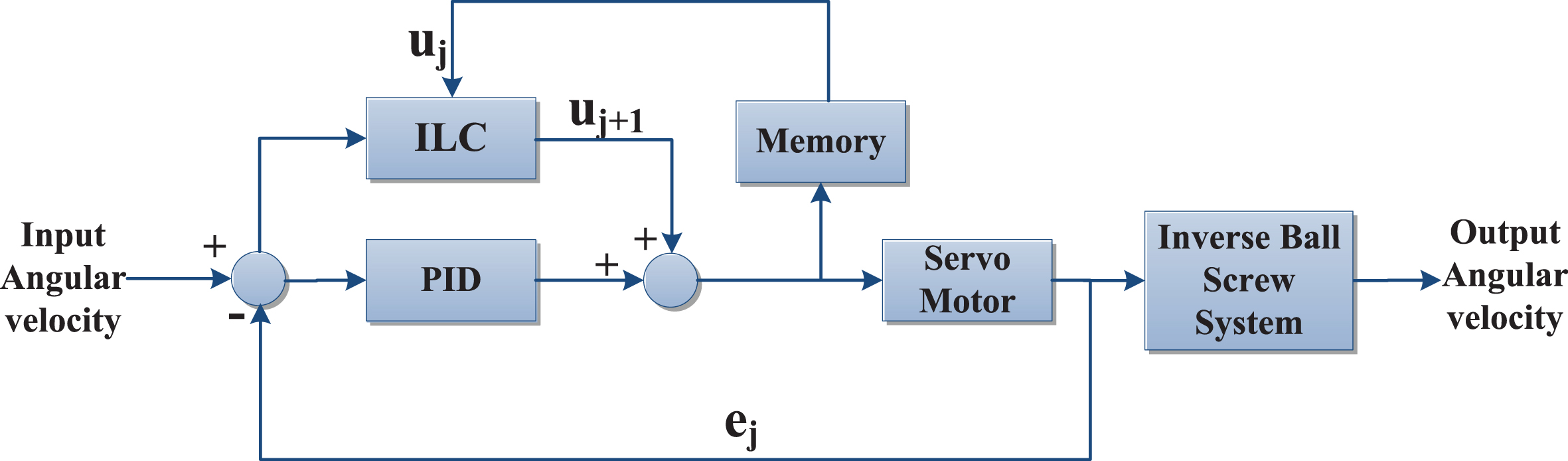
Block diagram.

Simulink program (simulation).
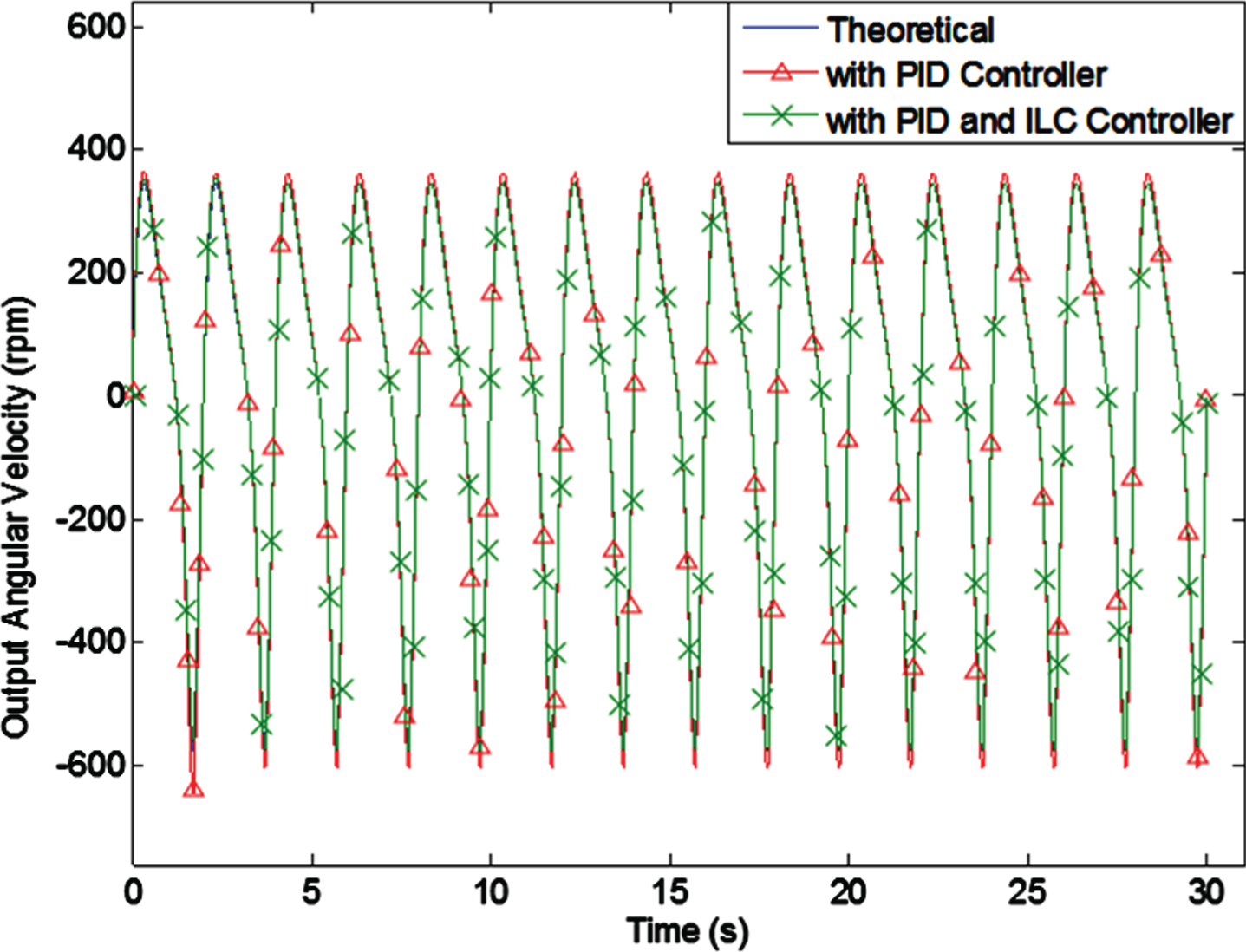
Output angular velocities (0–30 secs).
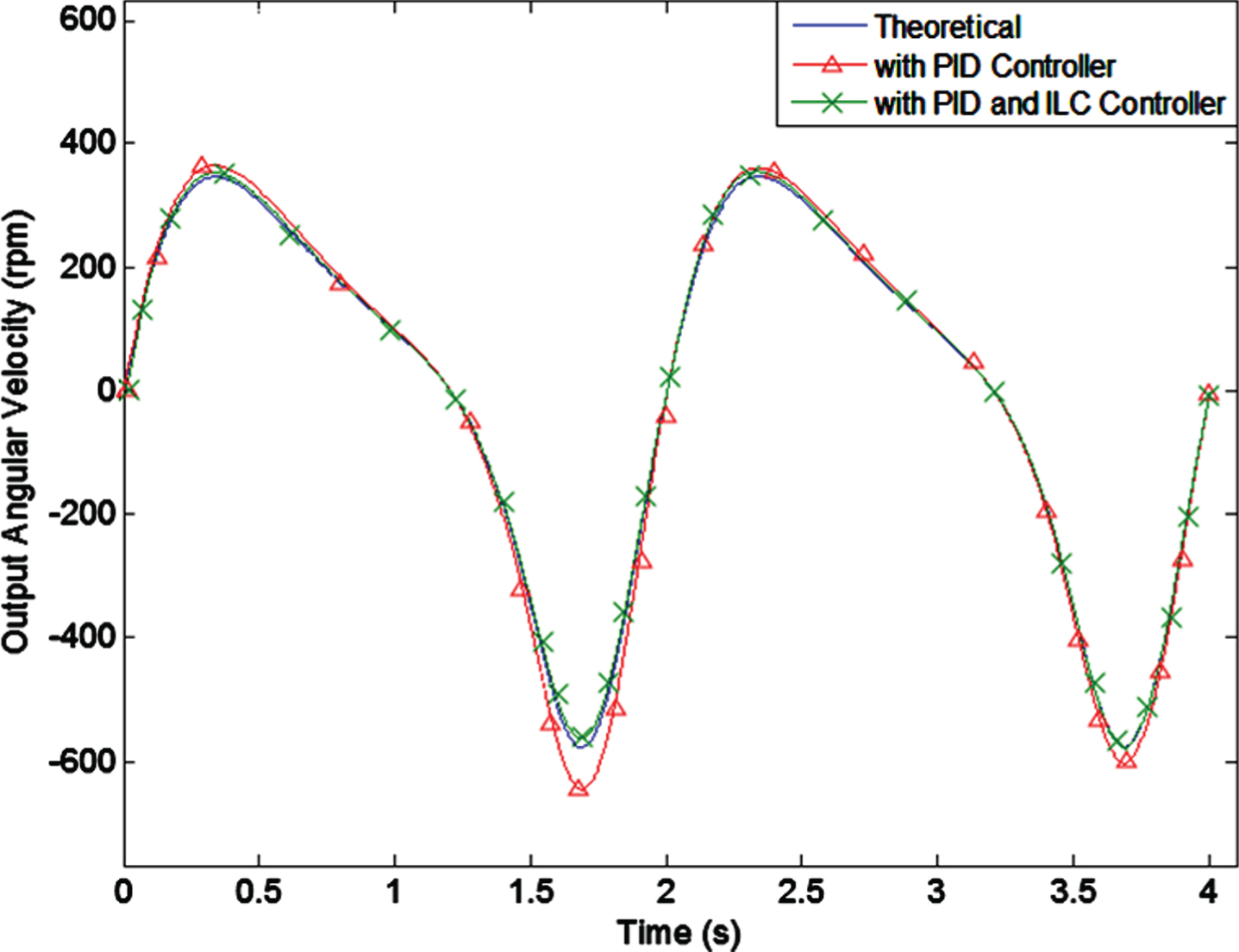
Output angular velocities (1st & 2nd cycles).
Output angular velocities (15th cycles).
Output errors (simulation)
To investigate the discrepancy between the simulation and experiment, a prototype testing is conducted, as shown in Fig. 13. The specifications of the devices in the experimental setup are listed in Table 3.
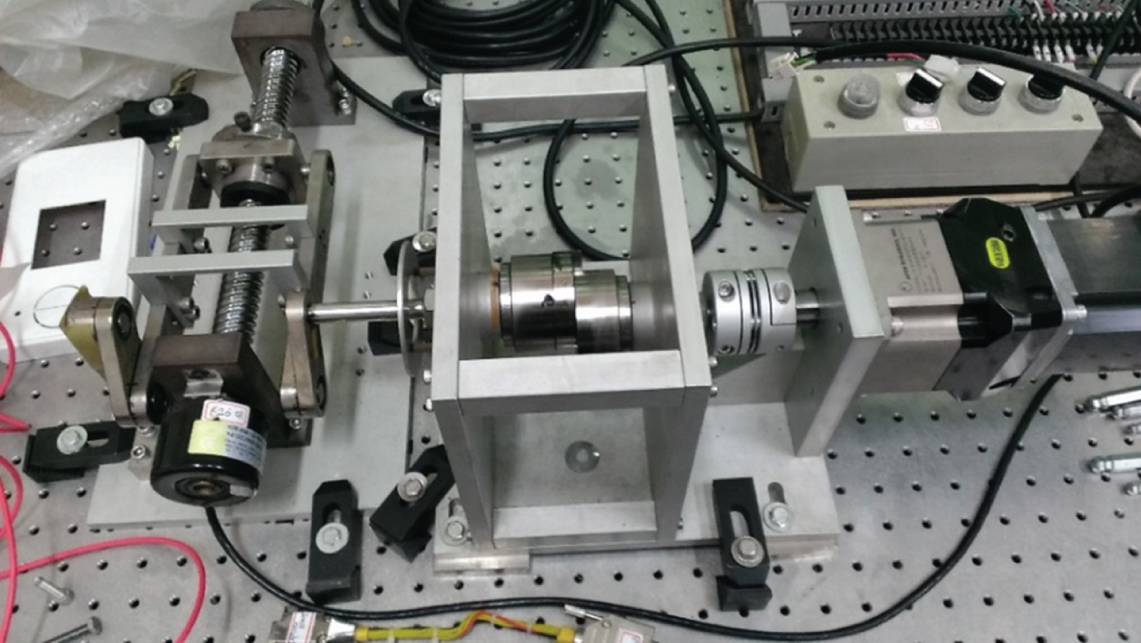
Experiment setup.
Specifications
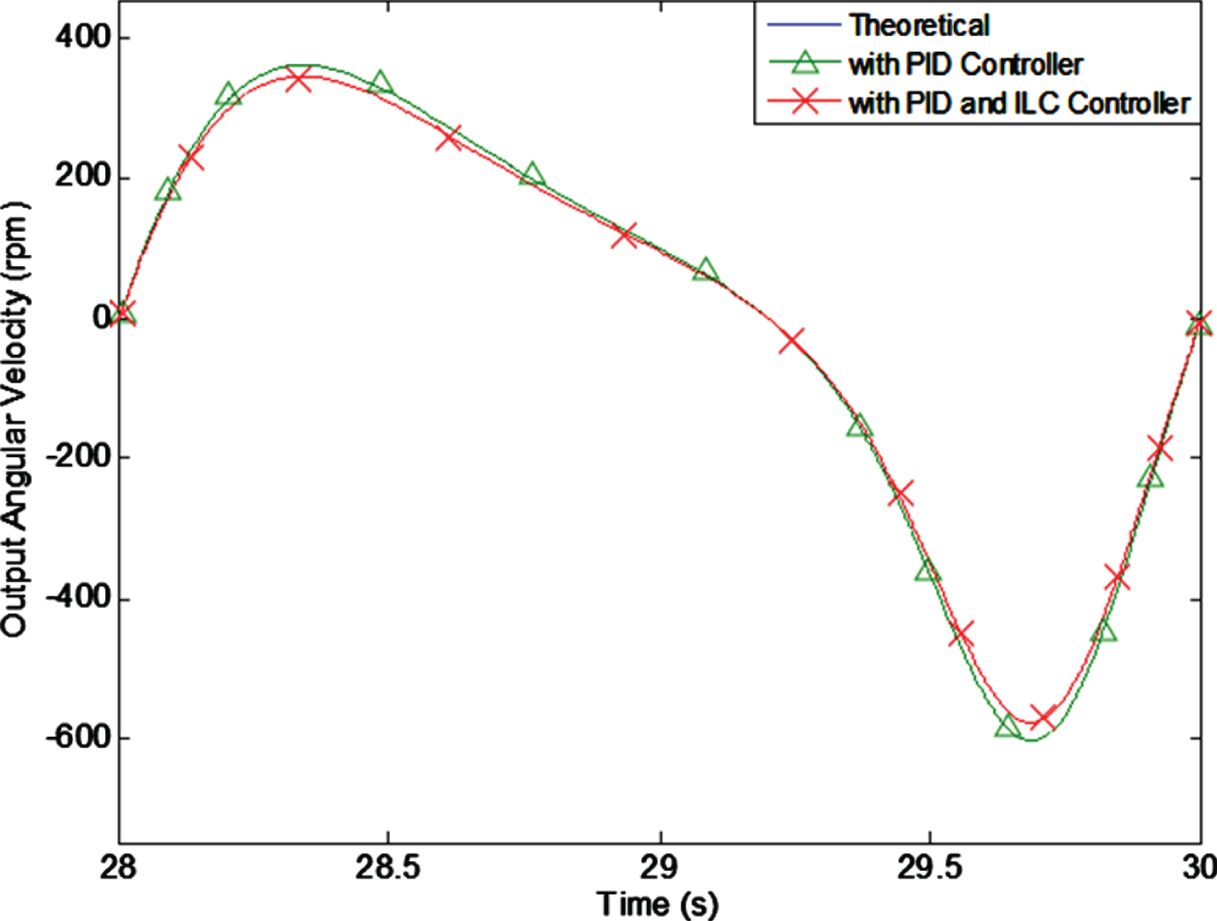
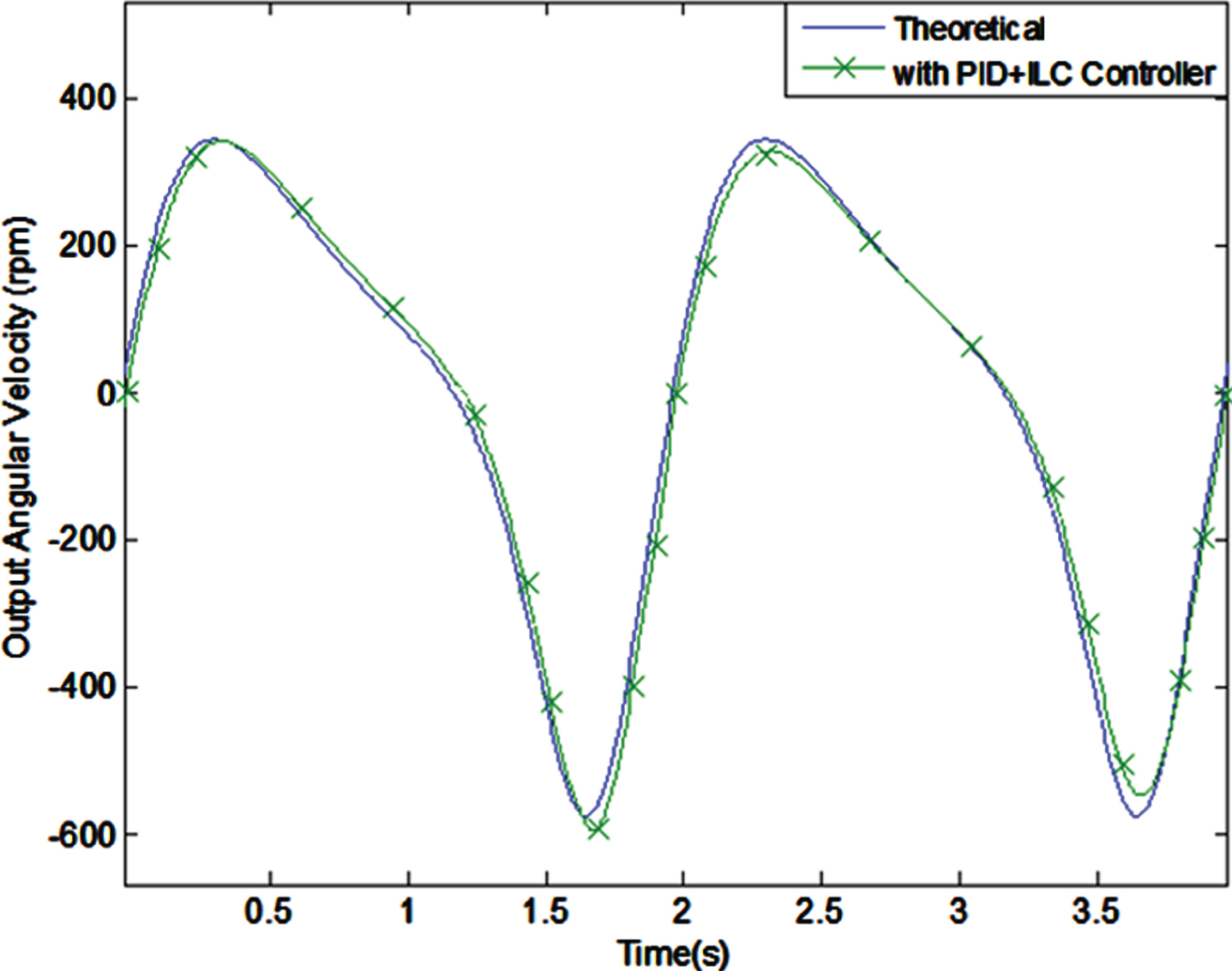
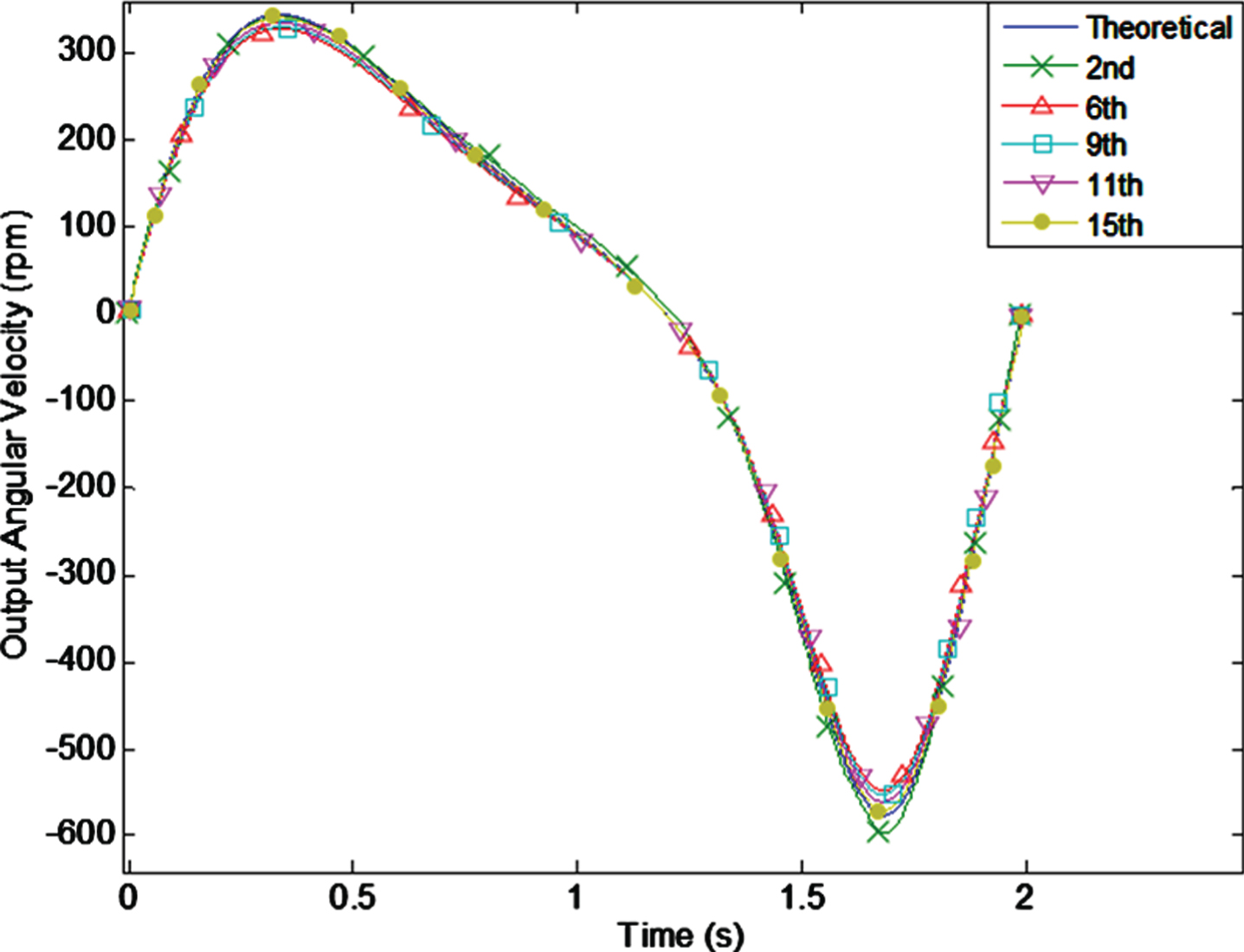
Figure 15 shows the comparison of the experimental output angular velocities of the theoretical, with PID controller, and with hybrid controller. The output angular velocity of using the hybrid controller is well track, at least roughly, the theoretical one. If the 1st and 2nd cycles are investigated, as shown in Fig. 16, it can be seen from the figure that the output in the 2nd cycle track better than that in the 1st cycle. In addition, Fig. 17 shows the comparison of the output angular velocity in various cycles. It can be found that the errors are gradually as the number of cycle increases, i.e., the cyclic error is reduced. Figure 17 show the output of the15th cycle, the square sum error is 2.41 × 106, and 94.21% improvement compared to the output of no controller used. Although the improvement is a little smaller than the simulation one, but is still very high. Therefore, the proposed hybrid control can effectively reduce the tracking error.
Simulink program (Experiment).
Experimental output angular velocity.
Experimental output angular velocity (1st & 2nd cycles).
Experimental output angular velocity(15th cycle).
In this study, an approach for reducing the cyclic error of a ball screw transmission system has been proposed. Kinematic and dynamic analyses have been conducted. The model of the system has been formulated followed by the ILC controller design. The simulated and experimental results have shown that the proposed approach can further reduce the cyclic error. Therefore, the proposed approach is feasible and effective.
Footnotes
Acknowledgments
The support of the National Science Council, Republic of China (Taiwan), under Grants MOST 101-2211-E-150-037 and MOST 108-2637-E-150-001, is gratefully acknowledged.