
Abstract
The present work represents the implementation of the various fuzzy controller with robust sliding mode control (SMC) technique on a nonlinear system considering various external disturbances and model uncertainties. The nonlinear system considered here is a single link inverted pendulum. The proposed work combines the advantages of the sliding mode controlling technique and fuzzy logic controller. A set of linguistic rules are designed in fuzzy logic control, which causes the system to be chattering free. Parameters of the nonlinear system are adjusted according to fuzzy adaptive laws, while the uncertainties of the nonlinear system have been approximated using a fuzzy system. Various types of controller based on fuzzy sliding mode, like approximation based sliding mode control technique; equivalent control based fuzzy sliding mode technique, and switch-gain regulation based sliding mode control methods have been implemented here. A comparative analysis of various methods is also have been discussed.
Keywords
Introduction
All the practical systems are nonlinear and this is the main reason behind the growing interest in nonlinear control. The best control benchmark system is an inverted pendulum which is inherently unstable. To stabilize a pendulum around its unstable equilibrium point, various control strategies have been discussed in the literature. To balance a single link inverted pendulum approximation of input-output linearization have been used theoretically and experimentally both, but this scheme uses complex mathematics which affects the response of the system [1]. Many control theorem such as Lasalle’s invariant, feedback linearization based on input-output, and second theorem of Lyapunov’s have been already used but at zero input case [2]. Use of conventional controllers like PID based control tuned by trial and error method [3], optimization tools like a linear quadratic regulator, and different algorithm [4–8], soft computing technique like neural and fuzzy control [9, 10] has been given in the literature. But the common problem with all the said technique is that the system gives optimal result for certain specific operations. Thus resulting to an sub-standard design in terms of robustness. Sliding mode control offers good robustness against the parameter uncertainties and external disturbances [11–13]. In this method, a sliding surface is developed based on state space, which works as a switch to control and observe plant behaviors with the input-output condition along with the constraints of modeling uncertainties and disturbance.
Although, sliding mode control is one of the most efficient techniques for controlling, it suffers from a few drawbacks. In ideal conditions switching of control should occur at infinitely high frequency. Due to these switching forces, the system dynamics changes there trajectories and slide along the given restricted subspace of sliding mode. In the real world, it is impossible to control the switching at high speed due to the physical limitations of switching devices and time delay computational control. This high speed switching produces a oscillation at very high frequency known as chattering in sliding mode control. Chattering may result in energy loss, system instability and sometimes it may lead to plant damage. Various techniques have been discussed in the literature to deal with the chattering. A thin boundary layer is superimposed in a neighbor of the sliding surface [14], boundary layer solution is proposed [15], higher-order sliding mode technique [16–19] estimation techniques of disturbance [20–23] control technique based on adaptive sliding mode [24], and adaptive fuzzy based sliding technique [25–28] are proposed in the literature to minimize the chattering. Each proposed technique has its advantages and disadvantages, but the selection criterion of the controller is depending on the ability to reduce the chattering which is related to the order of the mathematical model, plant uncertainty, and the type of application. Hence in all mentioned techniques fuzzy sliding mode control is simpler access to accord with chattering and plant uncertainties.
The relation between the sliding mode controller and fuzzy is a physical phenomenon [29], which forces a sliding surface to follow the fuzzy rules and back to the principle of sliding mode control. The hybrid control strategy of fuzzy and sliding mode control gives more stability and robustness against external disturbances due to unmatched plant dynamics. Fuzzy controller requires expert knowledge for designing the controller which is model-free, insensitive peripheral disturbances, and variations in parameters [30]. The concept of fuzzy logic based sliding-mode control (FSMC) has been adapted by combining fuzzy logic in sliding mode based control.
The theory of fuzzy control and sliding mode control, where fuzzy control dynamically optimizes the sliding surface of sliding mode control. The proposed controller not only attenuates uncertainties caused by unmatched dynamics and disturbances due to external sources but also significantly reduces the control chattering which is inherently found in the sliding mode control’s structure. This paper focuses on the application of different sliding mode controller based on fuzzy logic, and compare their results in terms of oscillation and settling time of controller output. Three controllers have been used to reduce chattering. By comparing the output results i.e. of the three controllers it has been observed that the results correspond to equivalent control based fuzzy sliding mode is better than that of fuzzy sliding mode based on approximation theory. Further, a fuzzy sliding mode based on approximation theory achieved a better result for switching gain based on the fuzzy sliding mode. The equivalent control based fuzzy sliding mode control is over approximation theory based fuzzy sliding mode. This method is again better than switching gain based fuzzy sliding mode control to reduce the chattering.
This article is organized as follows. The objectives of the present work have been presented in the first section. Section II represents the analysis of the inverted pendulum and its mathematical equations are presented. In Section III, the three control mode regarding fuzzy sliding has been explained. The results obtained from the Simulation has been portrayed in section IV. Section V embodies the conclusion followed by references.
Novelty
The three sliding mode controller based on fuzzy logic have been implemented for the inverted pendulum using simulink. A comparative analysis of the online fuzzy sliding mode based on switching gain method and approximation theory based fuzzy sliding mode method, with offline equivalent control based fuzzy sliding technique has been attained in terms of settling time. The unknown nonlinearity of the controller is approximated by the IF-THEN rules of the fuzzy system.
System modeling
A single link pendulum cart system, which consists of a moving cart containing a rod has been shown in Fig. 1. While the data of different parameters related to the inverted pendulum are given in Table 1.
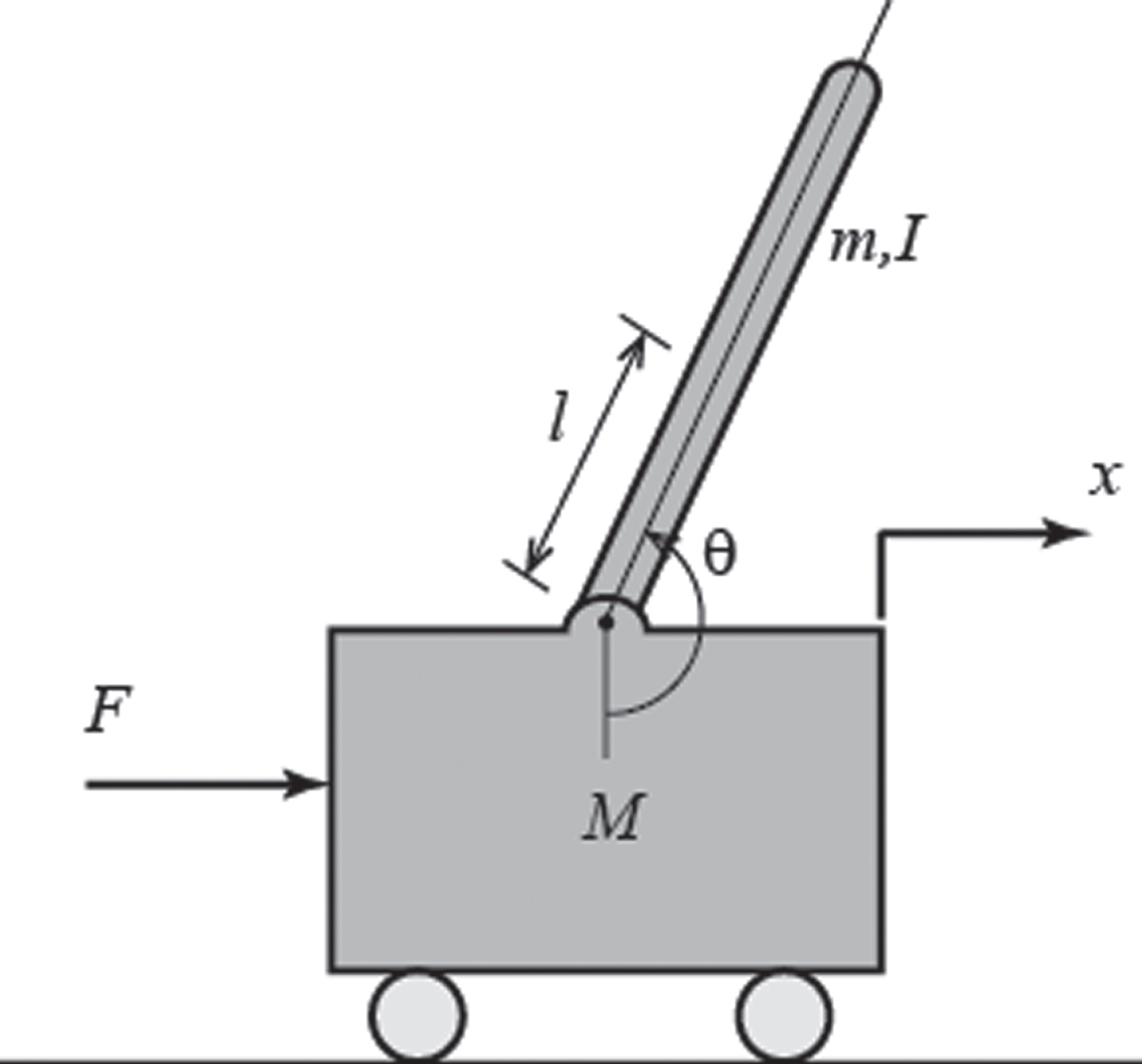
Single link inverted pendulum.
Nomenclature used in system modelling and fuzzy sliding mode control algorithm
The dynamic equations for the pendulum system to stabilize to the upright equilibrium position of cart pendulum system [31] are given as:
For controller design the state equations are,
Considering unwanted disturbance and parameter uncertainties in the inverted pendulum, the equation will be,
Where d(t) is an unknown disturbance.
Sliding control mode is robust to parameter variation and designs an accurate function of the system. The real continuous system is easily approximated by fuzzy logic [32–34]. Therefore, logic rules are designed and realized accordingly on a fuzzy sliding mode controller, based on experience. The fuzzy system based on the universal theory of approximation is used to design the model and to realized its external disturbances. Adaptive fuzzy sliding mode control without model information is realized by parameter adaptive adjustment.
Traditional sliding mode control
Let the nonlinear system
Where f (x, t) and g (x, t) are nonlinear functions of the system.
The sliding function is design as,
Where k > 0, then
The control law is given as,
The sliding mode surface is designed as,
In the fuzzy approximation theory, the unknown plant nonlinearities are approximated by fuzzy set IF-THEN rules of the fuzzy system. According to online adaptive law, the parameters corresponding to the fuzzy system have been controlled and set to a new value.
The adaptive law of the controller makes the system trajectory track the reference trajectory.
If function f (x, t) is unknown of a nonlinear system then a fuzzy estimation
In the above equation, a column vector € (x) is introduced due to free parameter
Where € (x) is the
Assuming, the optimum solution for fuzzy approximation,
Function f (x, t) represents the unmatched uncertainty component of the nonlinear system which appears in the input. The unknown function f (x, t) is written as,
The equation of fuzzy sliding surface,
Where,
To drive the plant trajectory on a sliding surface Lyapunov function is design as,
From Equations (13), (14) and (15).
The adaptive rule of fuzzy controller
In the switching gain based fuzzy sliding mode method the discontinuous switch gain of the sliding surface has been substituted with fuzzy logic for further control. The switching function of sliding mode be,
The error of switching function e,
The switched input u
sw
of the controller is written as:
The sliding surface of switching gain fuzzy controller is designed as:
Where ‘d’ disturbance and switching term ′δ′ both are large, which increases chattering. Then
Using product deduce, and center average fuzzy, the controller is designed as:
Where
The ideal
The adaptive rule is given as
The optimization parameter of adaptive law is
Sliding surface
To drive the system trajectory on a sliding surface Lyapunov function is design as,
From Equations (28) and (29),
The performance of fuzzy sliding mode control on the inverted pendulum is evaluated via numerical simulation.
The parameters for single link inverted pendulum is given as, M = 1.0 kg; m = 0.1 kg; l = 0.5 m, g = 9.8 m/s2. Simulation is carried out while considering the movement of the cart and pendulum both are in one plane. The objective of the controller is to remain the pendulum in an upward position for stable operation.
The fuzzy sliding mode control based on approximation theory
The desired trajectory of the inverted pendulum θ
d
(t) = 0.5sint, the initial state is
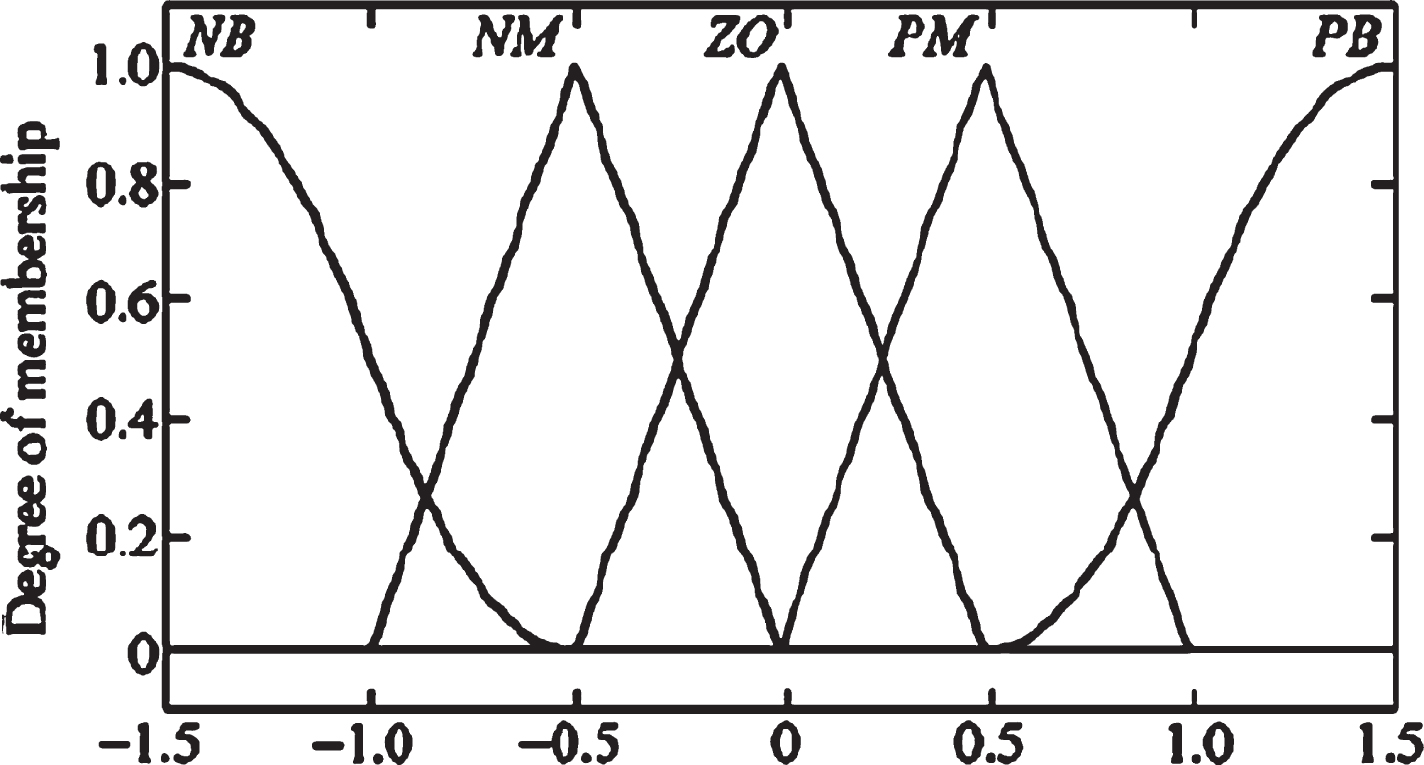
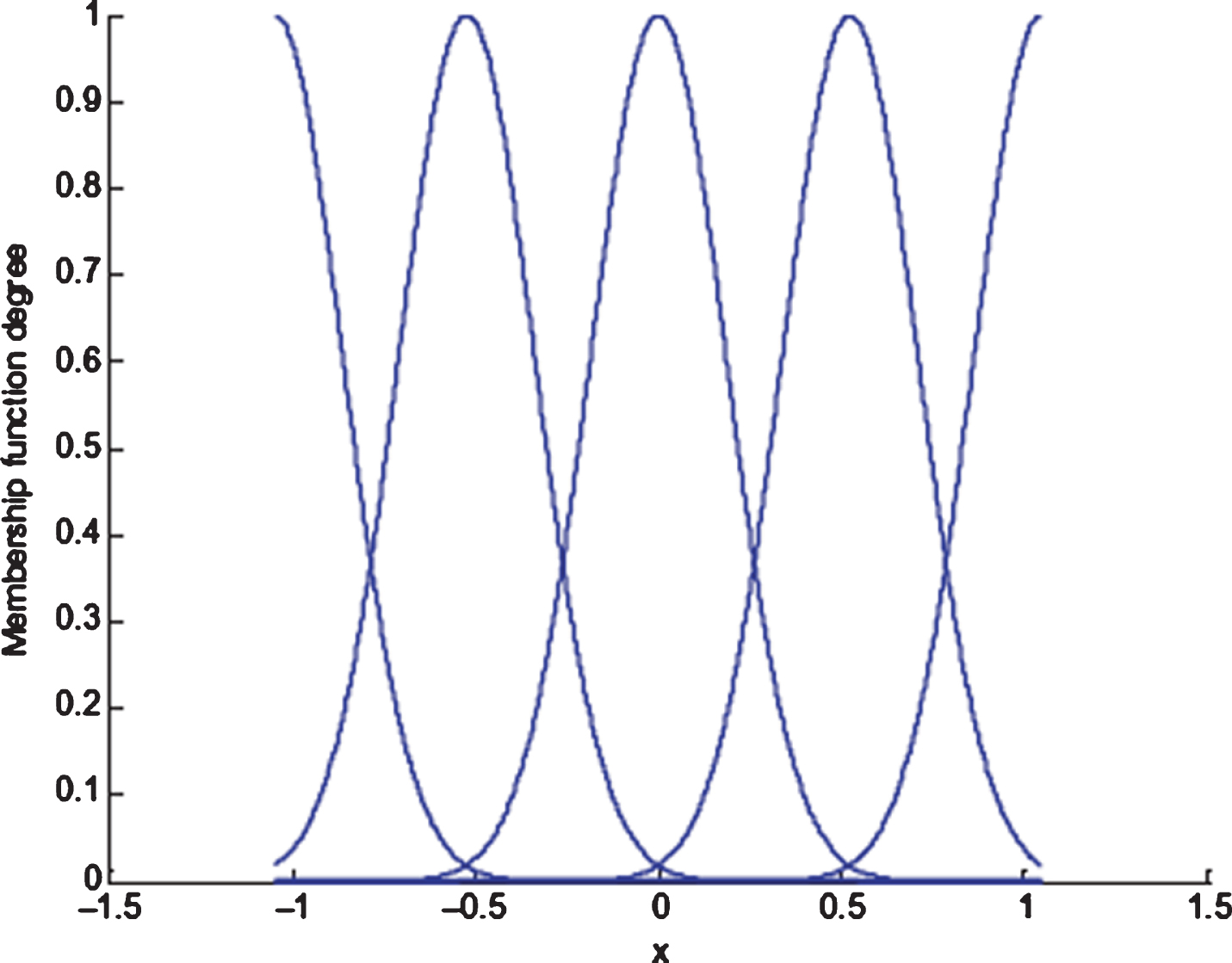
The membership function of the fuzzy controller is written as,
The five fuzzy sets construct total
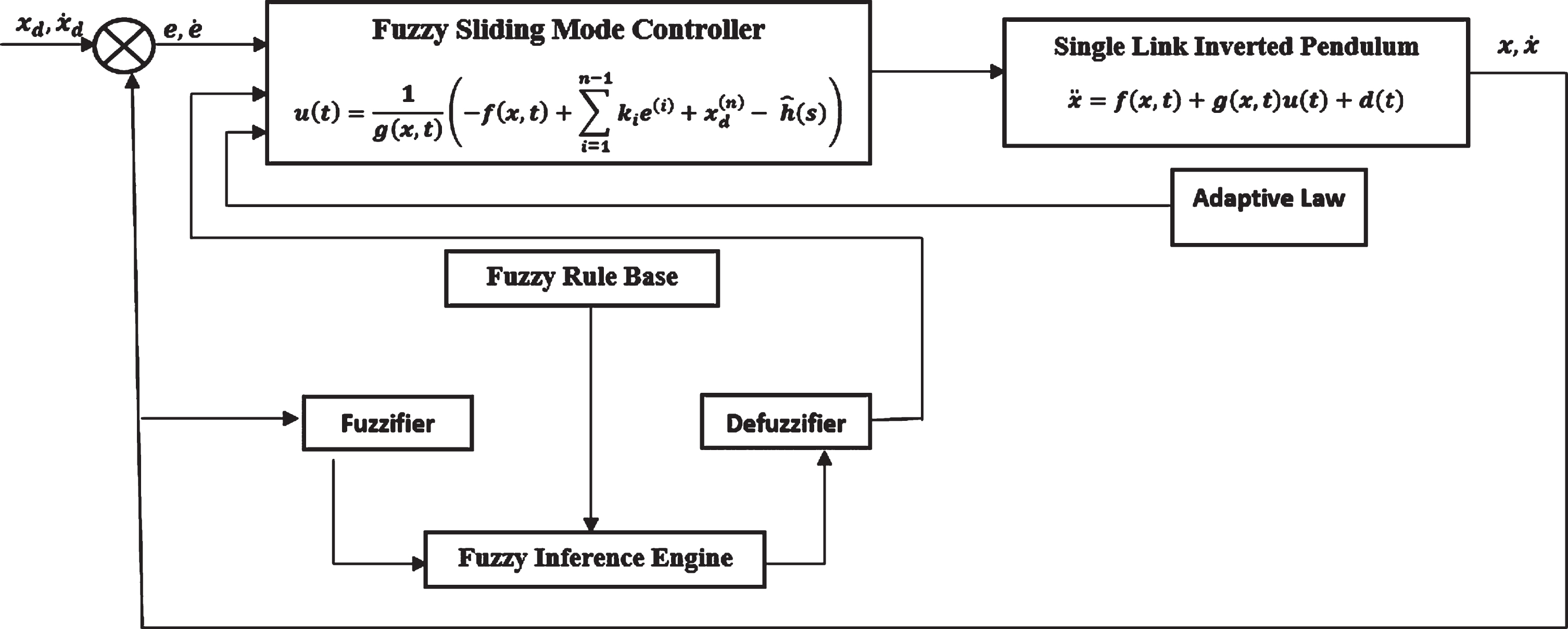
Control structure of fuzzy logic based sliding control mode.

Simulink block diagram of the system.
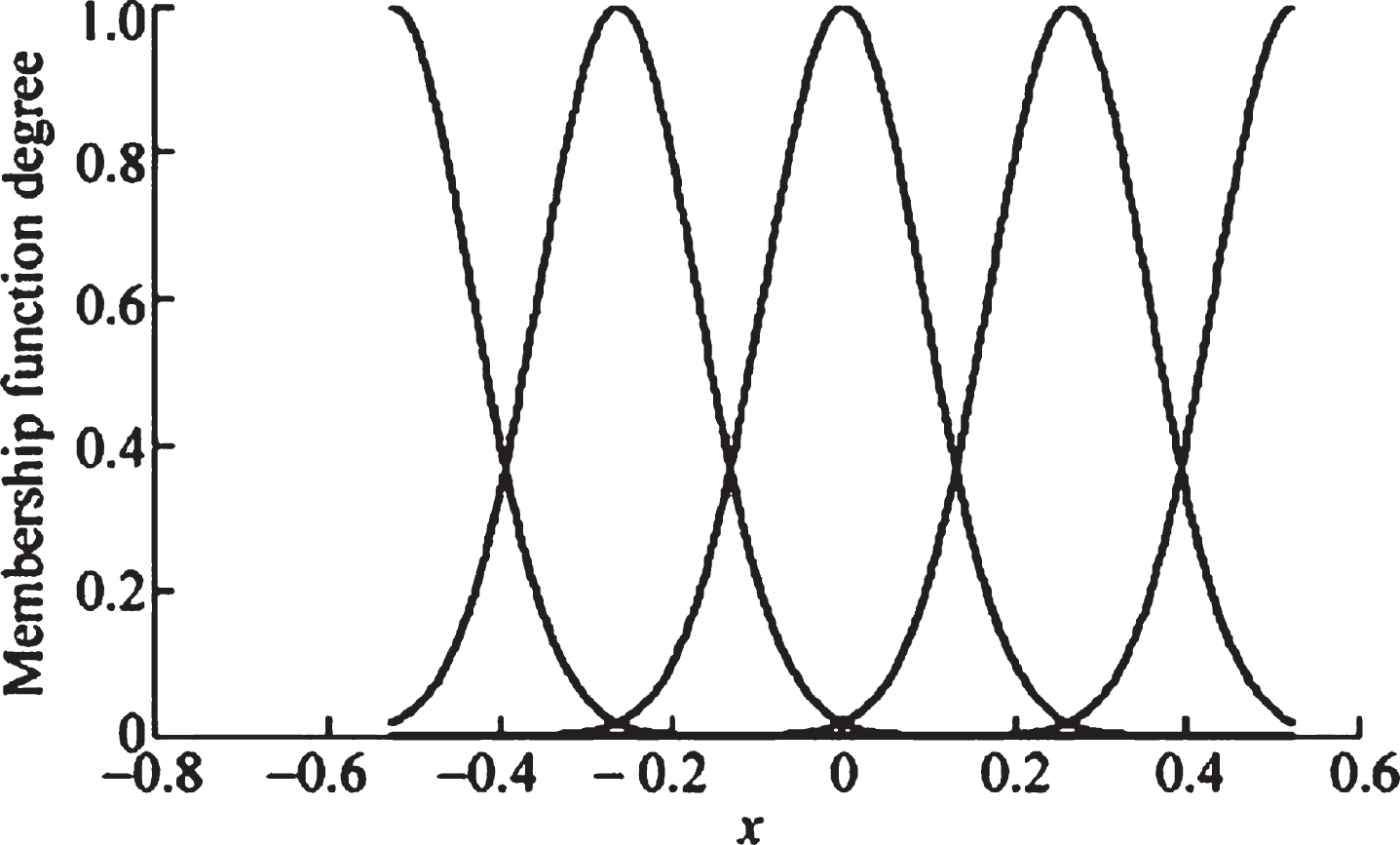
Membership function of fuzzy controller.
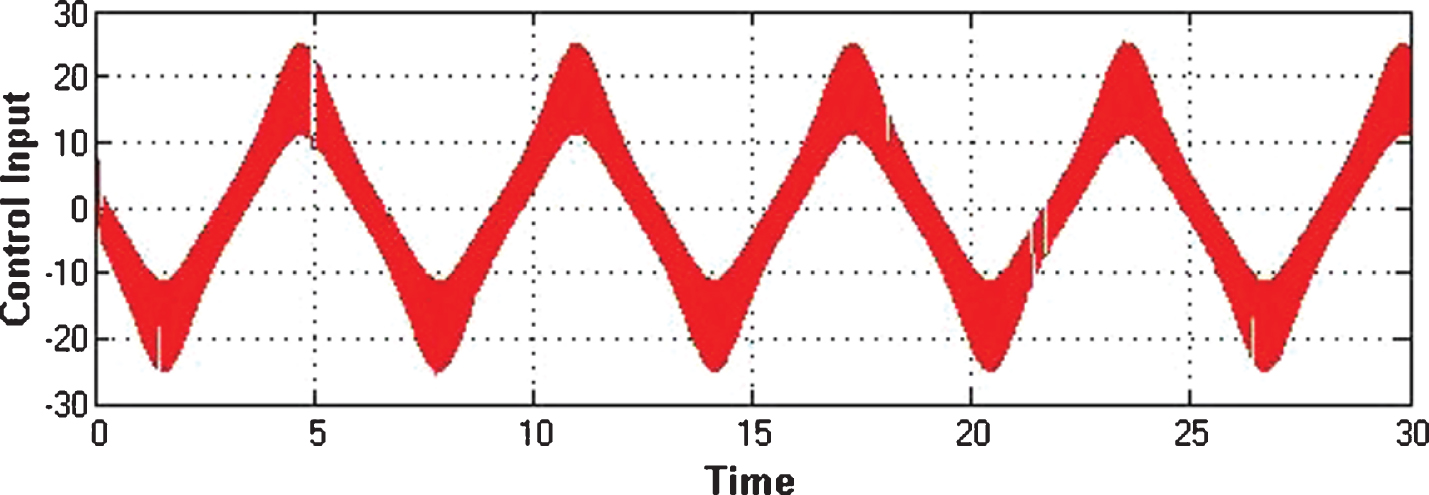
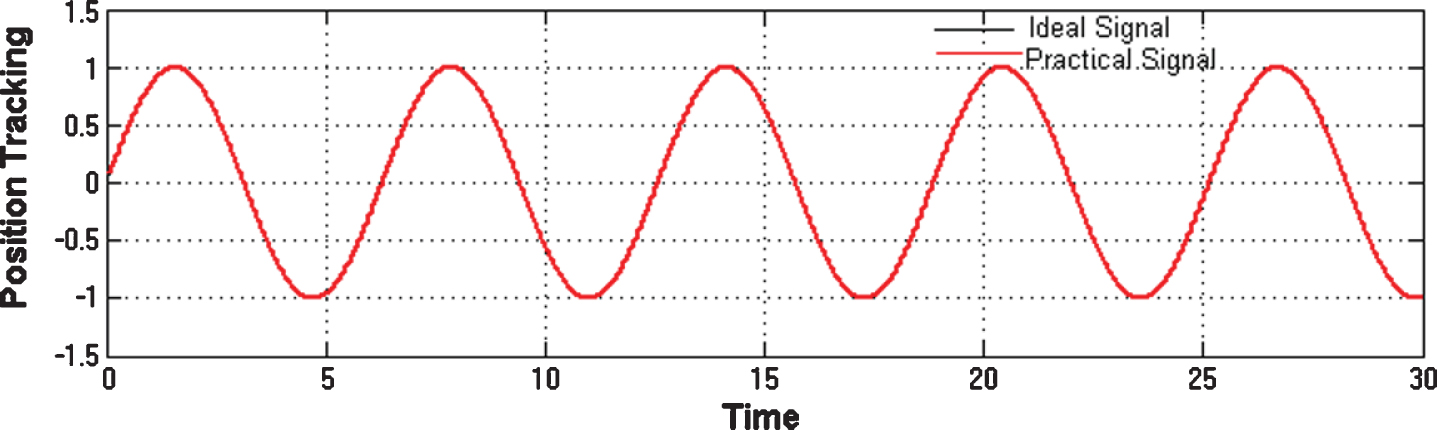
The transient of the controller is settled down after 5.2 sec, as shown in Fig. 5, and hence reduce the chattering. Figure 6 depicts a trajectory that can be tracked as an improved feature of the output of a non-linear system. The unknown nonlinear function f (x, t), is approximated by a set of fuzzy IF-THEN rules whose parameters are estimated accordingly adaptive laws as shown in Fig. 7.
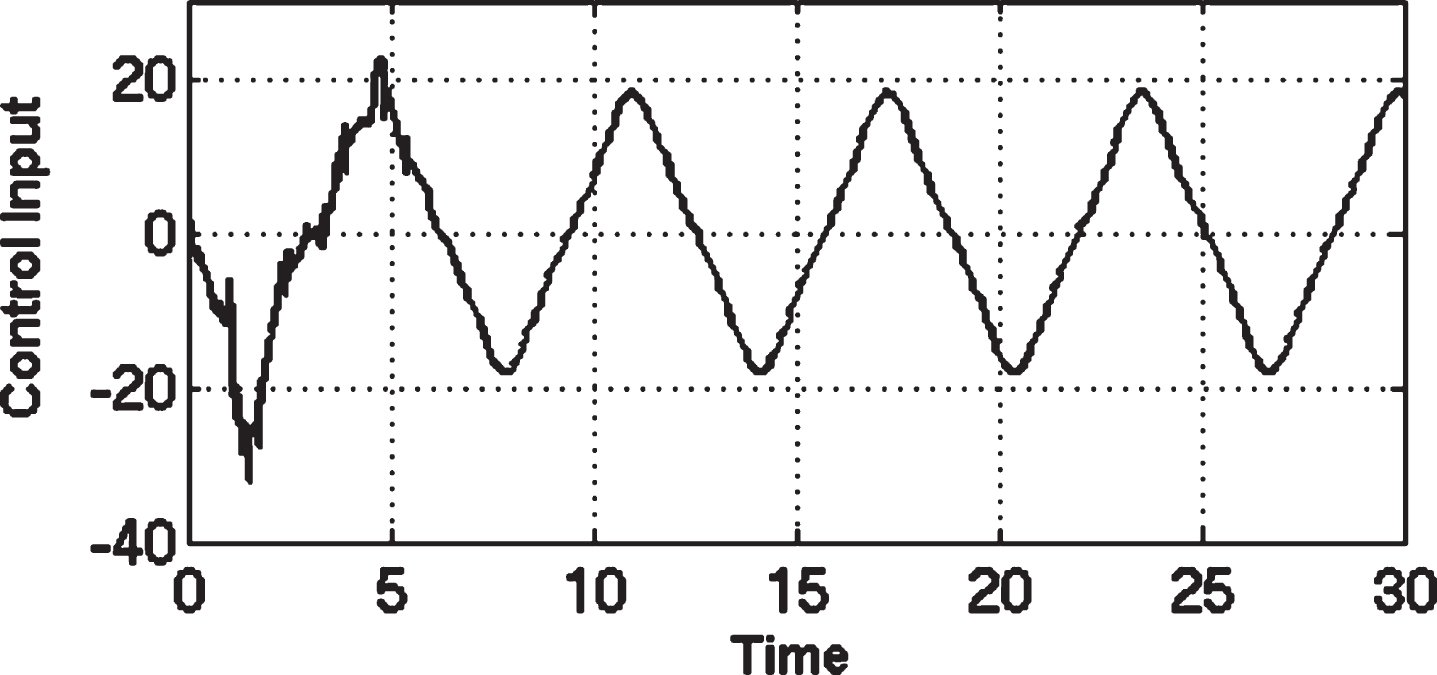
Control input for inverted pendulum for fuzzy logic approximation based sliding mode control.
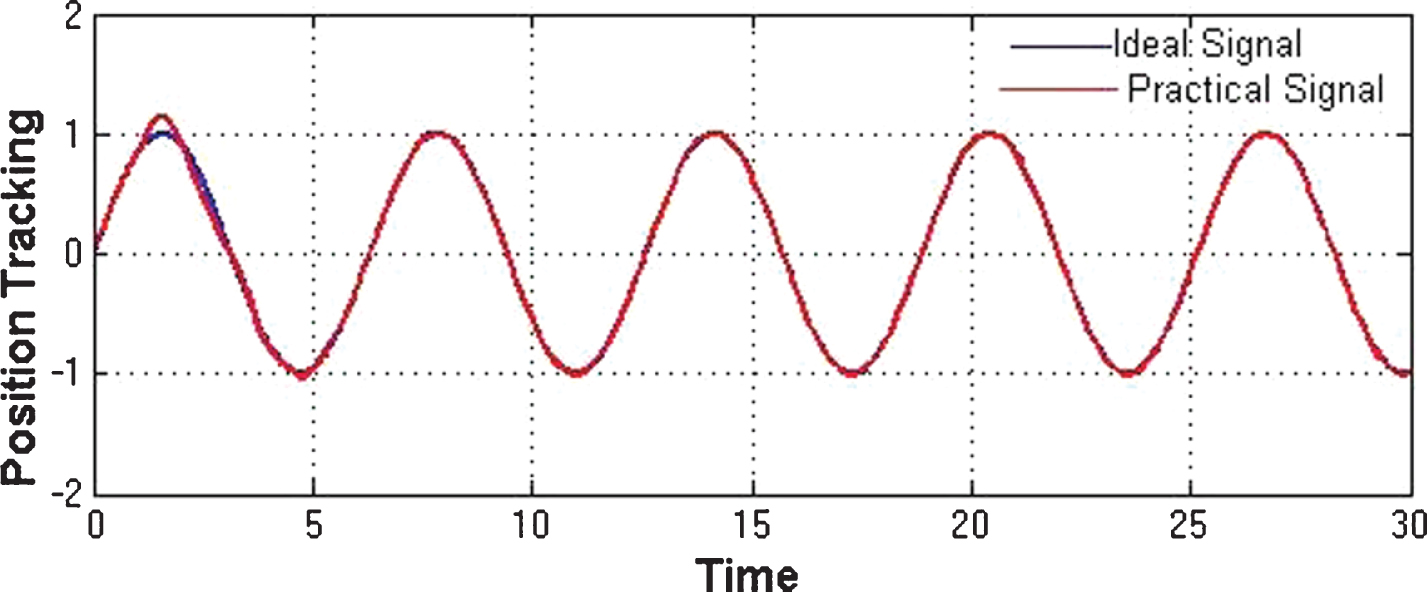
Position tracking of the inverted pendulum for approximation based fuzzy sliding mode control.

Uncertainty approximation of inverted pendulum for approximation based fuzzy sliding mode control.
The desired trajectory of the inverted pendulum θ
d
(t) = 0.5Sint, the initial state is
Membership functions developed and considered for the switching gain based method is defined as
The fuzzy logic based controller approximated the discontinuous switching gain by the membership function adapted as shown in Fig. 8. The approximated gain reduces the high-frequency amplitude, as shown in Fig. 9 the control input oscillation is settled down after time 22 sec, which further estimates switching gain and approximates the fuzzy controller as shown in Fig. 10. Figure 11 represents the position tracking of the pendulum around the reference signal.
Membership function of fuzzy controller.

Control input for inverted pendulum for switching gain based fuzzy sliding mode control.
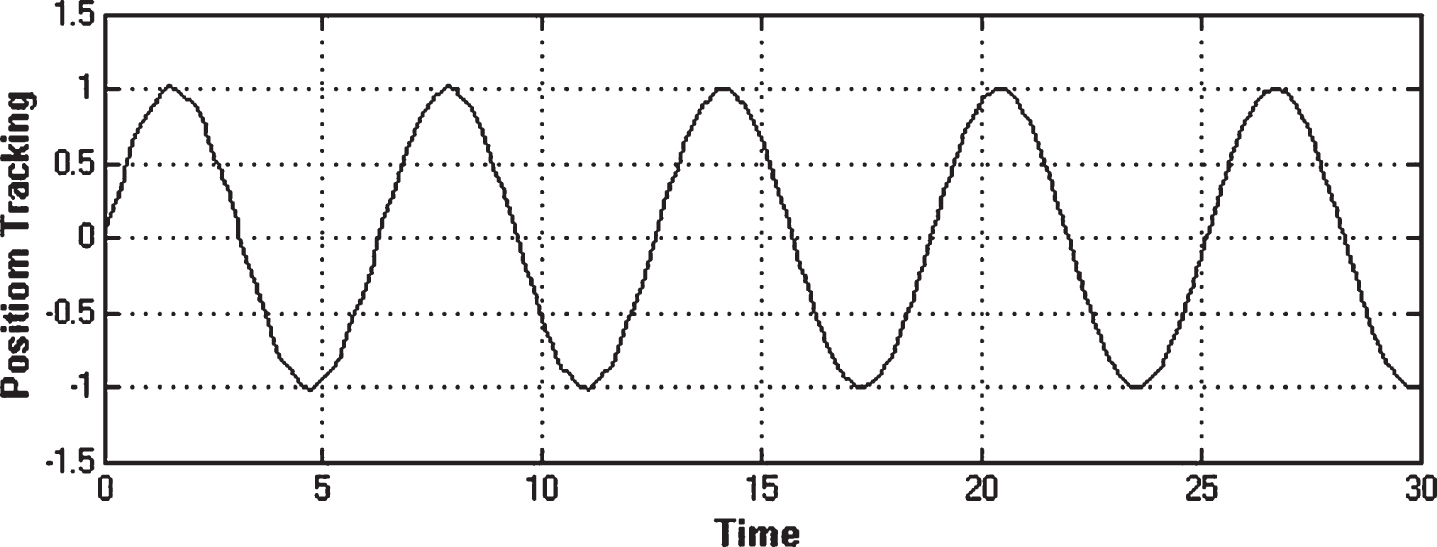
Position tracking of the inverted pendulum for switching gain based fuzzy sliding mode control.
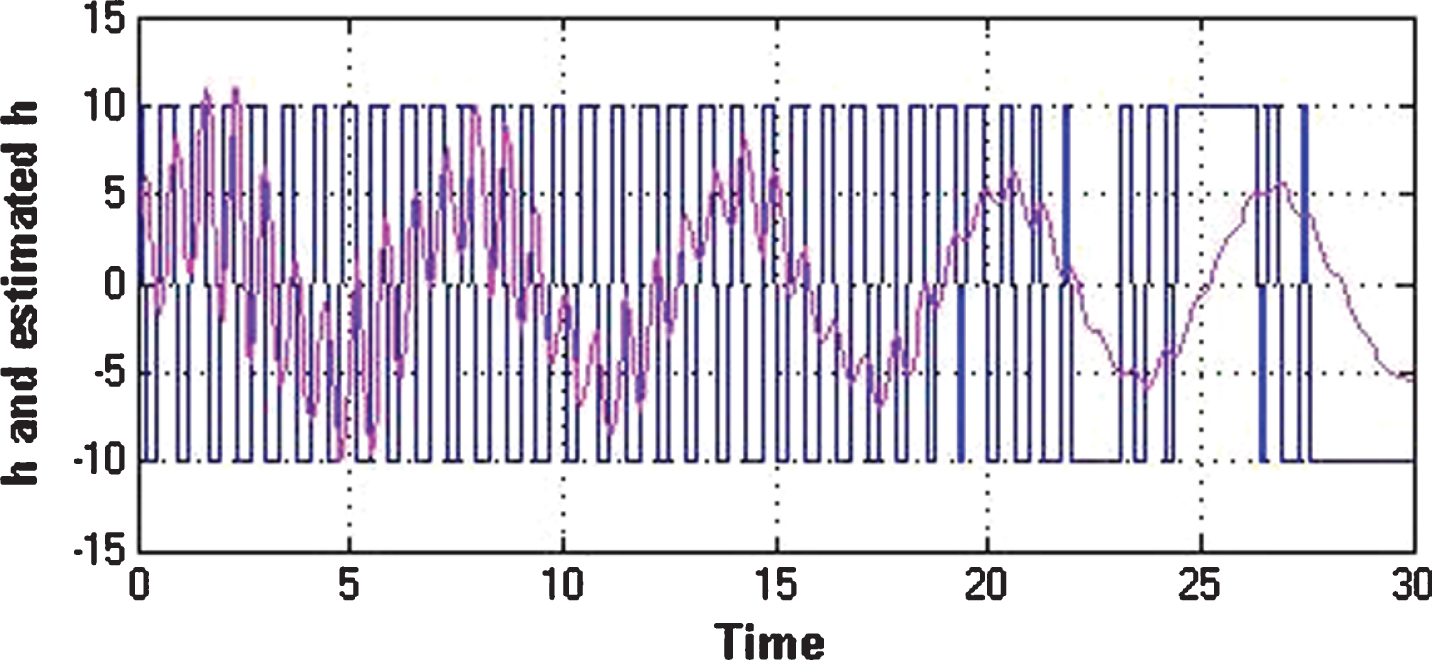
Fuzzy approximation through control switching for switching gain based fuzzy sliding mode control.
The desired trajectory of the inverted pendulum is θ d (t) = 0.5Sint, let the disturbance d(t) is given in form of Gaussian as follows:
Generally, a sliding mode based control operates using switch rule and equivalent rule. The logics of the equivalent rule has been replaced by a fuzzy equivalent rule, which is mentioned below as follows;
If x is HN then μ is HP
If x is N then μ is P
If x is Z then μ is Z
If x is P then μ is P
If x is HP then μ is P
where the fuzzy sets HP, P, HN, N and, Z, and denote highly positive, “positive”, “highly negative” “negative”, and “zero”, respectively.
The output of the equivalent control law method is realized by considering μ as the membership function, which is shown in Fig. 12.
Membership function of fuzzy controller.
The control input is divided into two steps, the first step is equivalent control u equ which takes the system states toward the sliding surfaces, and in the second step the switch control u s , ensures that the trajectories correspond to the system state should remain on the sliding surface. Further, the fuzzy control method is also developed as u = u equ + μ . u s , by the implementation of reverse fuzzification.
Where u equ = equivalent control law and u s = switch control law. The transient of the controller may be sufficiently reduced if μ ≠ 1.
Different control input is obtained which is free of chattering as shown in Fig. 13. This is achieved by substituting the equivalent control by fuzzy logic in the fuzzy sliding control method. Also reduces the tracking error of the pendulum as shown in Fig. 14. Hence the stability is also improved of the inverted pendulum.
Control input for inverted pendulum for equivalent control based fuzzy sliding mode control.
Position tracking of the inverted pendulum for equivalent control based fuzzy sliding mode control.
As shown in Table 2, minimum settling time is achieved by the equivalent control based sliding method which reduces the oscillation of the controller. The reduced oscillation sufficiently minimizes the chattering phenomenon. Hence equivalent control based on the sliding mode control method is the most suitable method to eliminate chattering over approximation based sliding control mode and switching gain based sliding control mode.
Performance evaluation of various fuzzy sliding mode controller
An equivalent control based sliding mode is directly replaced by the fuzzy controller and whenever the trajectory of the system is trying to leave the switching surface, a large control force is provided by fuzzy rules to drive the trajectory again on the switching surface. Whereas approximation based fuzzy sliding mode and switching gain based sliding mode controller has been approximated with fuzzy values. Also, the equivalent control based sliding mode controller obtained a stable position through tracking of an inverted pendulum. This has been achieved with zero steady error within a specified bounded area.
The current work depicts three types of fuzzy sliding mode controller named approximation based fuzzy sliding mode, equivalent control based sliding mode; and switching gain based sliding mode control have been implemented to stabilize the tracking issue of inverted pendulum system. The equivalent control based sliding mode controller is effective to address the parameter uncertainty and external disturbances of the system. A control strategy of fuzzy sliding mode involves a chattering free and stabilized nature for an inverted pendulum.