
Abstract
In this paper, a solar photovoltaic model integrated with brushless DC motor via DC to DC zeta converter is controlled in two stage. In first stage, a fuzzy rule based maximum power point tracking (PPT) is proposed to generate the pulse for DC to DC zeta converter. It is efficient intelligent control approach to extract maximum power from the solar PV system and enhance the speed to track the maximum power. The basic three process of fuzzy logic controller (FLC) are fuzzifier, inference and defuzzifier where the defuzzification process is used center of gravity (COG) method to convert its original value. The FLC to extract maximum PPT for solar PV based brushless DC motor can be examined the performance under transient and dynamic condition with different solar insolation. Moreover, in second stage a trapezoidal control approach based electronic commutation is chosen to generate the pulses of voltage source inverter (VSI) and it offers the smooth control of the brushless DC motor which can easily applicable for water pumping or irrigation purpose. A second stage, trapezoidal control approach is close loop control algorithm using sensorless drive. The performance of proposed fuzzy rule based control algorithm is shown using simulation results on MATLAB platform.
Introduction
In the developed and developing countries, the non-conventional resource (NCR) of energy graph are increasing progressively in the present scenario [1, 2]. Renewable resources like wind and solar energy are demanded more to fulfill the extra demand of energy. The limitation of wind energy is to control the speed of generator under high or low speed of wind [3] whereas solar photovoltaic (PV) array is suitable under 300–400 degree Celsius. According to weather survey of Jazan (Kingdom of Saudi Arab) solar PV is suitable throughout the year. Moreover, the Middle East Asia and some part of India, China and Pakistan have good source of solar power throughout the year. These highly populated area invites to generate more electricity using solar PV array. The solar PV array have a more scope in household, industry and irrigation [4]. However, researchers are focusing to commercial the solar PV array in the field of irrigation/water pumping using induction motors and DC motors [5, 6]. Moreover, brushless DC motor have robust and good thermal feature which enhance the capability of the drive circuit for solar based water pumping [7].
The photovoltaic (PV) array has capability to convert sun power into electrical power. The maximum efficiency of PV array depends on many factors such as instantly extraction of power from maximum power point (MPP). Moreover, variation of solar irradiation, arises oscillation in PV voltage thereby, it reduces the efficiency of MPP operation. Many researchers find the techniques to get MPP of PV array. The basic parameters like shorted terminal current and open terminal voltage are used to design maximum power point tracking (PPT) which are inappropriate to extract maximum power as losses in this technique is more [8]. The perturb & observe (P&O) technique [9], a commonly used incremental conductance maximum power point tracking (INC-MPPT) method [10–12] which is based on observation of PV characteristics to optimize the power available from PV solar module. While some gap in research is always available for further improvement [13]. The modified technique is used in P&O which is tested under various irradiance [14]. A solar maximum power is extracted using a sliding mode maximum PPT under fast irradiation transient which is given in [15]. A learning based maximum PPT and single sensor based maximum PPT are given in [16, 17]. Moreover, a fuzzy-neural network-based hybrid maximum PPT algorithm is reported in [18]. These literatures are taken from the grid tie MPPT which is complicated in design. Moreover, speed control of brushless DC motor using fuzzy logic controller is reported in [19]. It replaces proportional integral (PI) controller whereas in [20] FLC based maximum PPT works under steady state conditions with conventional buck boost converter. These gaps unable to work under dynamic condition and could be possible to untrack the power constantly near the maximum power point under dynamic condition. And conventional single switch buck boost converters are used with these techniques [21]. It has further limitation like range of duty ratio (D) and inverted output which limit the working of solar fed brushless DC motor under fast irradiation transient. Thus, the need for new configuration of FLC based maximum PPT (FLC-MPPT) to fed DC power for brushless DC motor which is work as a water pump. In this paper, authors have proposed ease soft computing technique like fuzzy rule based control algorithm. It is an active computationally fast, resilient and efficient maximum PPT. A fuzzy logic controller integrated with zeta converter is employed for maximum PPT to overcome the discussed shortcomings. It tolerate zero oscillation near the maximum power point (MPP) [22]. It is efficient and fast control approach to extract maximum PPT from solar PV array [23, 24].
The proposed algorithm is used to enhance the transient and dynamic behavior of the brushless DC motor and it becomes rugged under the variation of solar parameters. A FLC is one of the most successful applications in industrial and commercial purpose [25]. A FLC offers non-linear characteristics which is accomplished the various non-linear complex control act, even under undefined non-linear conditions. A FLC is needed a system model knowledge and it just copies the human learning style. It has two crucial information like error and rate of change of error. Whereas, conventional control algorithm needs complex mathematical knowledge.
The basic three process of fuzzy logic controller (FLC) are fuzzifier, inference and defuzzifier where the defuzzification process is used center of gravity (COG) method to convert. In the second stage, a brushless DC motor is required a drive circuit because it is not a self-starting motor. A simple control algorithm based on electronic commutation is proposed in this work. The propose drive is the close loop control algorithm using sensorless drive. A brushless DC motor drive circuit without the position sensors is called sensorless drive [26]. It reduces cost and size of the model. Moreover, it enhances the dynamic response of the brushless DC motor as compared to voltage controlled pulse width modulation (PWM) converter. The main contribution of authors are given as follows. The proposed configuration has enhanced transient, steady state and dynamic condition and seeking quality over conventional maximum PPT. The zeta converter integrated with FLC-MPPT gives new configuration of the proposed model and enhance the duty ratio (D). The comparative results of INC-MPPT and FLC-MPPT is presented using zeta converter. The accuracy of FLC-MPPT under rapid change of weather using zeta converter has improved. The proposed model is sensorless thus, it reduces the model cost and size. Moreover, it enhance the dynamic response of the brushless DC motor as compared to voltage controlled pulse width modulation (PWM) converter
The presentation of paper is planned as follows, in section 2, a brief explanation of working principle of model is given while in Section 3, a detail description of control algorithm is presented to understand the value of the proposed algorithm. In section 4, MATLAB SIMULINK based results and discussion are presented. Whereas, at last paper is concluded.
Working principle of solar pump
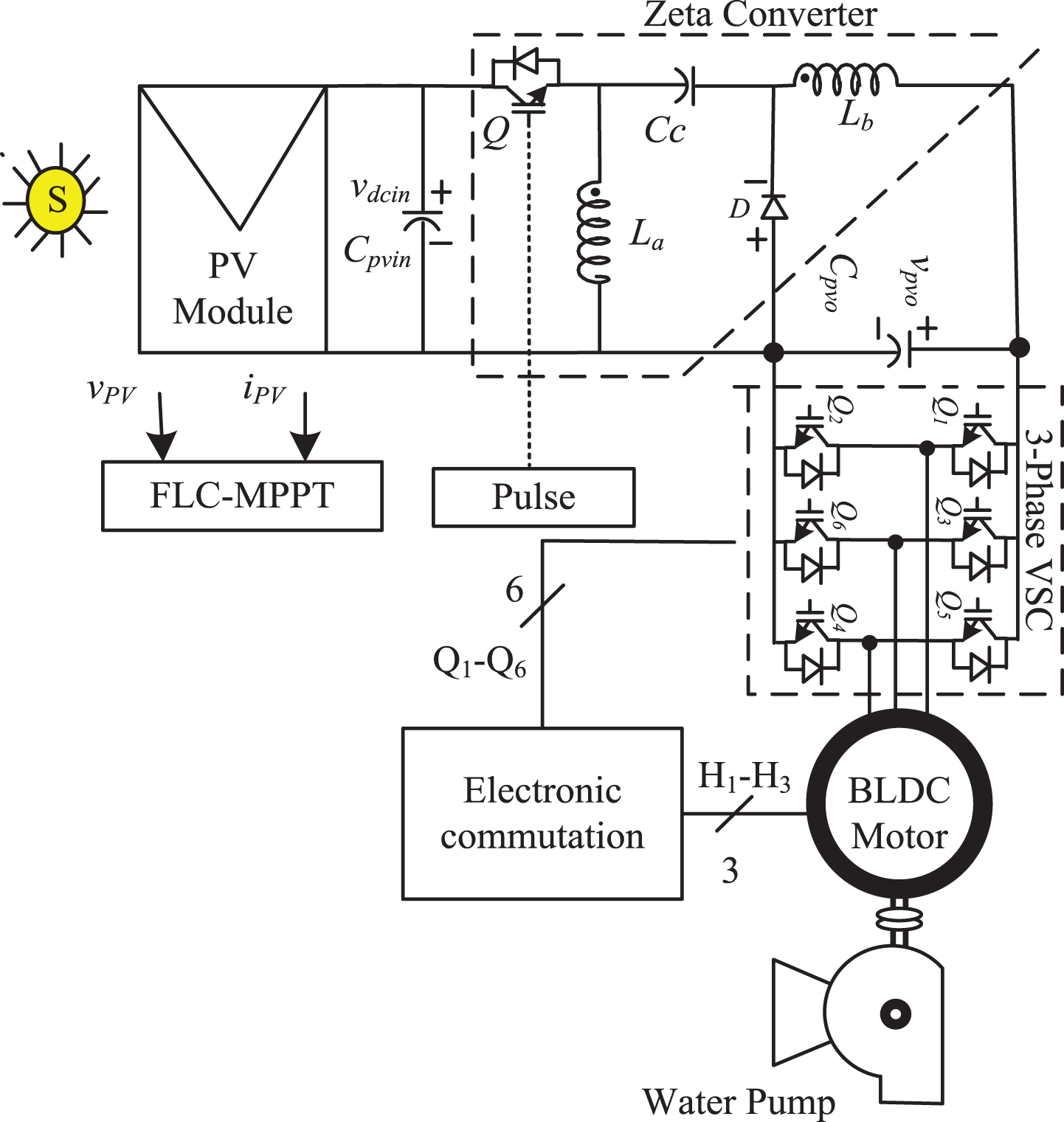
In Fig. 1, the currents i pv and voltages v pv are generated by solar PV array and it is connected via zeta converter. The gate pulse of power electronics switch for zeta converter is generated by FLC-MPPT at maximum power. The FLC-MPPT, takes i pv and v pv as feedback to optimum control of duty cycle. The high frequency carrier wave compares with duty cycle and controls the input DC voltage of three phase voltage source inverter (VSI). The gate pulse of power electronic switches IGBTs of three phase VSI is controlled using trapezoidal control based sensorless drive circuit. The three phase VSI 1200 degree operation is used to generate AC supply for brushless DC motor coupled with water pump. Ideally, the PV arrays generate same power as brushless DC motor water pump demands whereas, the practically some losses are existing due to converting parameters, motors and switches losses [27]. Thus, solar PV array is generated some extra power than the rated of BLDC motor water pump to run efficiently.
Proposed model of solar based BLDC motor water pump.
In this section, two stage of control algorithm is proposed for solar PV based water pump. In the first stage, a fuzzy rule based control approach is used to extract MPP tracking whereas in next step trapezoidal control approaches based electronics commutation is used to generate the pulses of voltage source inverter (VSI) to drive the brushless DC motor based water pump. A detail description of two stage control approach are as follows
Design of fuzzy logic control algorithm for MPpt
A FLC-MPPT is applied in first stage, where the extraction of power at maximum level is available from the solar PV module. The maximum active power is calculated at every instant t using voltage and current level [28]. And next instant t-1, the maximum active power is calculated to compared from first instant t. It gives the change in power (Δp(t)) whereas, change in current (Δi(t)) is calculated in the same way. The design of FLC-MPPT is required the following equation which are given as follows,
In Fig. 2, the basic component of FLC [29] are explained to understand the working of proposed controller
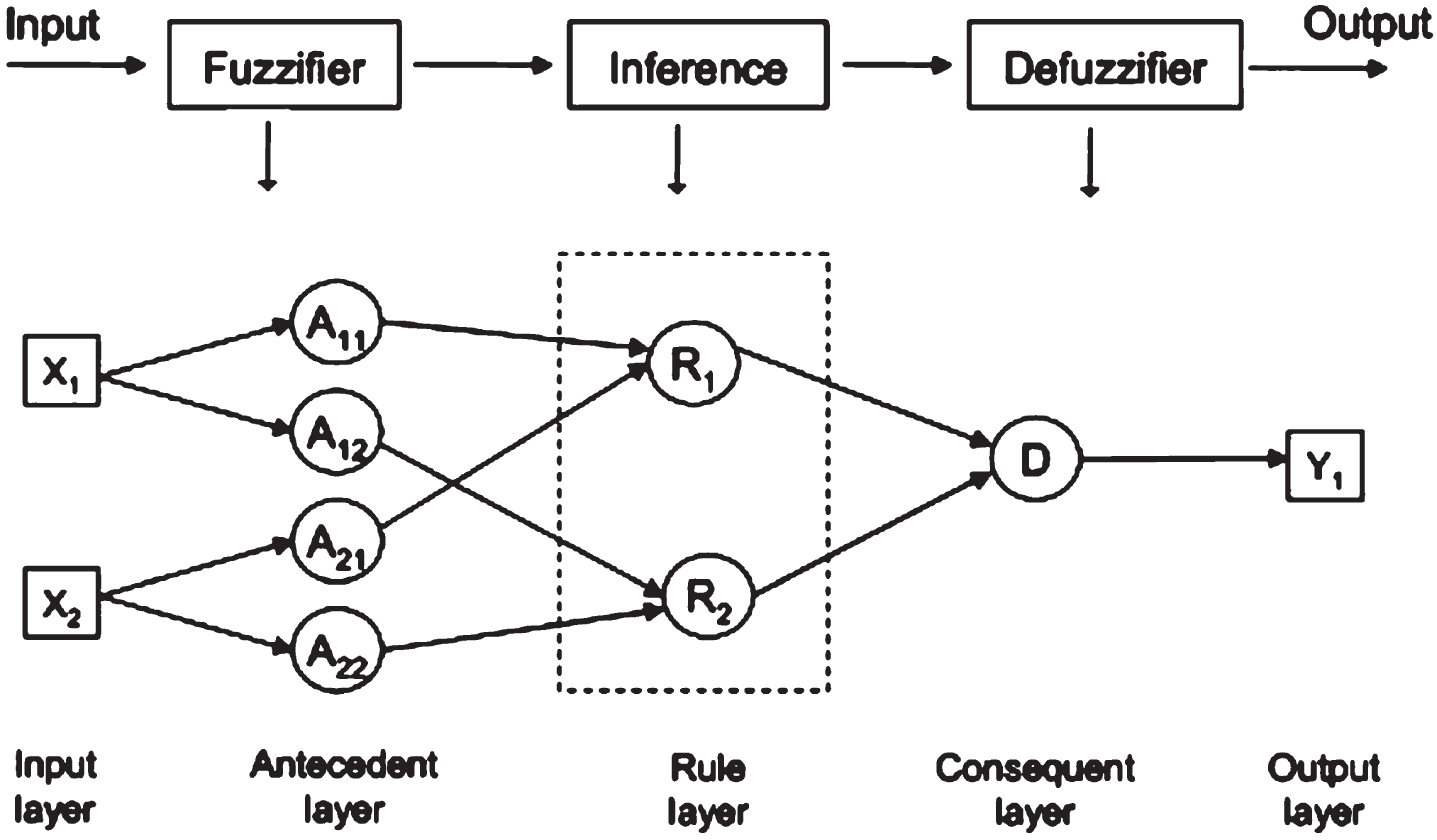
Internal structure of the fuzzy logic controller.
It takes the non-linear input data and allocate its value from 0 to 1. It gives satisfactory results under such generalized set function called membership function (MF). Membership functions (MF) have different shapes like S, π, A and Z [30] In the present work, five MF is presented for the following linguistic terms, very low (VL), low (L), neutral (N), high (H), very high (VH). The two input, e(t) and Ce(t) with the range of (–1 1) and (–0.1 0.1) respectively are processed to get output ΔD(k). Whereas, range of ΔD(t) is chosen (–0.01 0.01) for proper operation of the FLC-MPPT. The following triangular membership functions (MF) are given in Fig. 3.

Triangular MF (a) Membership function of input variable of error. (b) Membership function of input variable of change in error. (c) Membership function of output variable.
It has a fuzzy rule layer where it uses modelling information of input and output mapping for skill control of the system. The various techniques are available to map the pattern of the inference block. In this work, Mamdani inference technique is taken where, If-then else statements is applied in the rule layer for fuzzy inference [31]. Here, 25 permutation and combination of fuzzy rules are possible which is shown in Table 1 and fuzzy rule based ruleviewer and surface viewer are shown in Fig. 4.
Fuzzy rule matrix
Fuzzy rule matrix

Viewer (a) ruleviewer and (b) surfaceviewer.
This is the last process of FLCs where it uses the fuzzy layer rule and process to get desire output values. There are various defuzzification methods to get desire output. It simply converts FL values into data values. The available conversion methods are average weight (AW) method, centroid, mean of maximum (MOM), and smallest of maximum (SOM) [29].
Using above concept, the FLC-MPPT model is modeled using MATLAB SIMULINK fuzzy logic tool box. Centroid technique is applicable for MPPT using Mamdani controller, in which fuzzy sets are converged at consequent layer D. In Fig. 5, a MATLAB model is shown for FLC-MPPT.
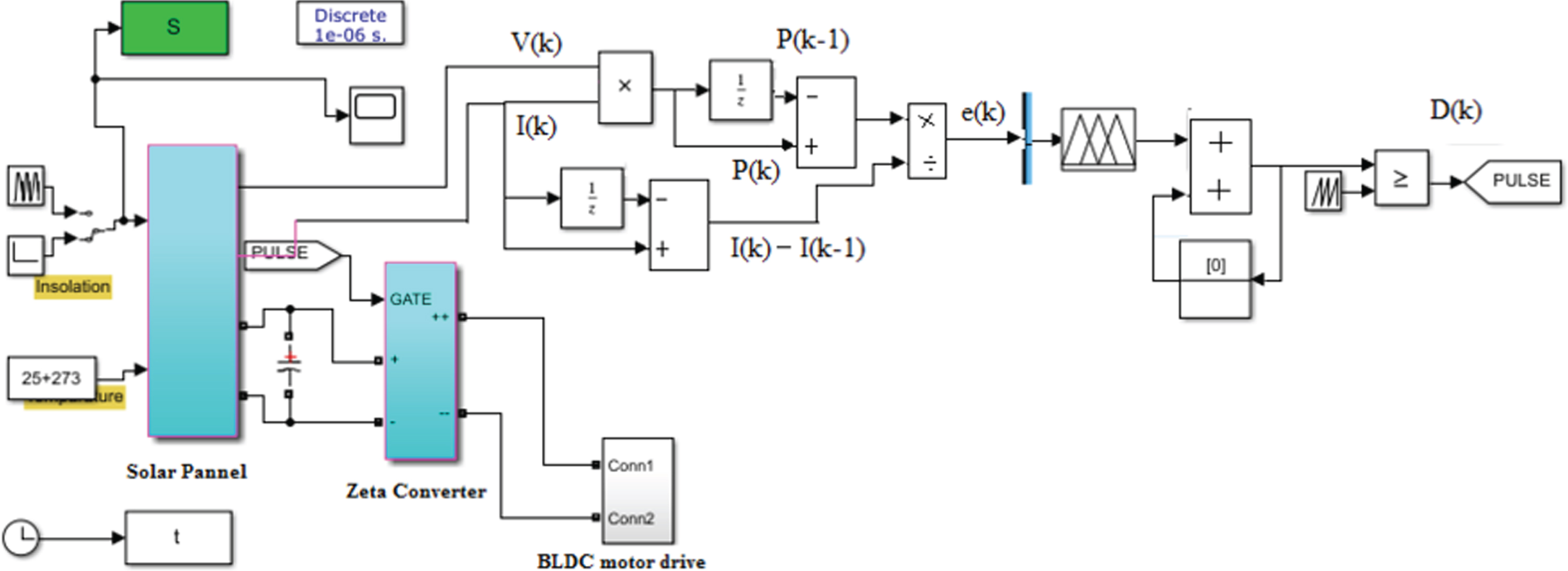
A Matlab model for FLC-MPPT.
In the second stage, a trapezoidal control approach based electronic commutation is proposed to generate the pulses of voltage source converter (VSI). Moreover, various control approaches with sensor and sensorless drives are available to control the brushless DC motor. A brushless DC motor drive circuit without the position sensors is called sensorless drive [26]. The proposed control algorithm is the close loop control algorithm sensorless drive. It cuts the price and size of the proposed model. Moreover, it enhance the transient and dynamic response of the brushless DC motor based water pump under such case is smooth as compared to voltage controlled pulse width modulation (PWM) converter. In this case, the voltage source inverter (VSI) switches are pulsed using the reference three phase stator current I
abc
* and the actual three phase stator current I
abc
. The I
abc
* is evaluated using the brushless DC motor torque constant and Hall sensors signals which is shown in Fig. 6. The reference stator current I
S
* can be evaluated by following equation
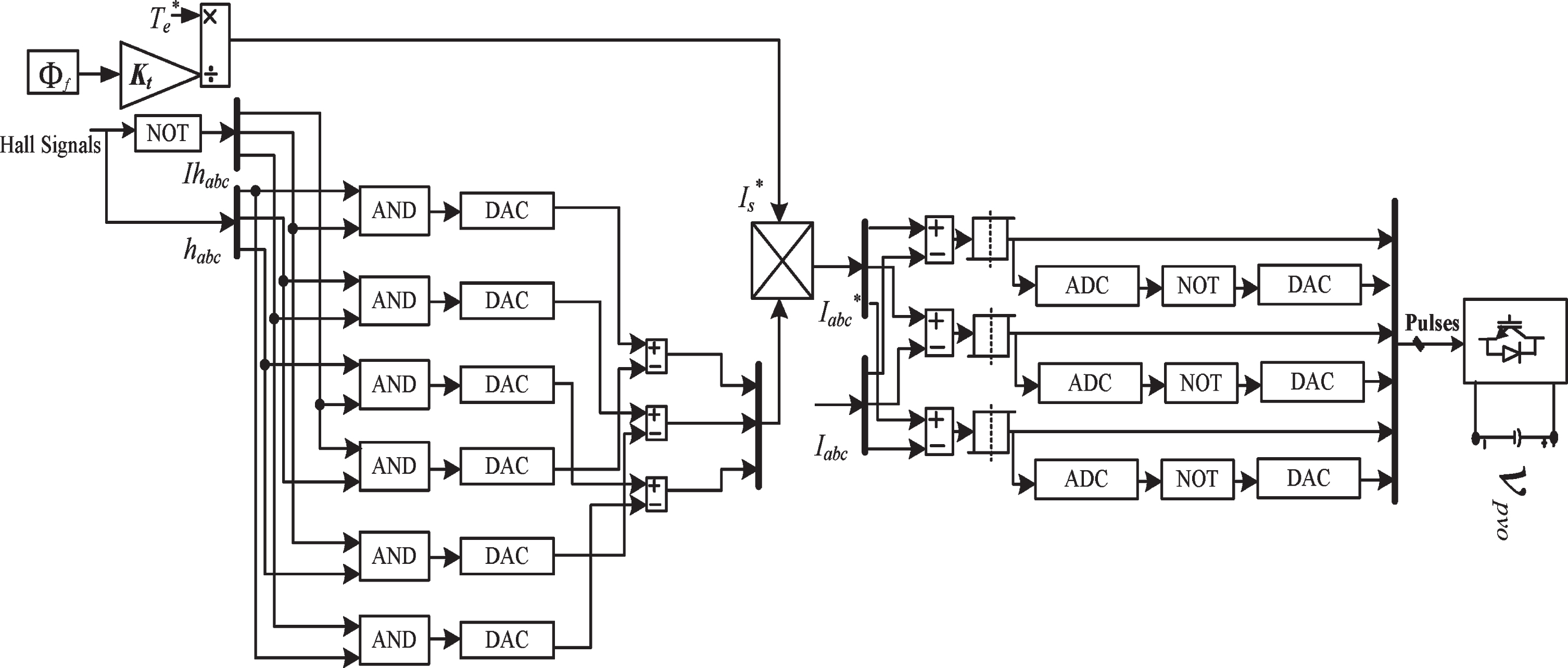
Matlab model for pulses generation to drive brushless DC motor.
Truth Table of Hall sensors output signals
An application of solar based water pump model is needed to analysis its performance. The proposed Simulink model is designed using Table 3, Tables 4, and 5 for solar PV parameters, zeta converter parameters and brushless DC motor respectively. A two level control approaches of the proposed model is FLC-MPPT and electronic commutation. A FLC-MPPT is smart to extract the maximum active power from solar module whereas, an electronic commutation uses to control the speed of BLDC motor pump. Test model is analyzed under standard condition and under the various solar irradiance. The behaviors of test model are analyzed under transient state, steady state and dynamic conditions. Figure 7 illustrate the graph under various solar irradiance conditions. and Fig. 8 shows the comparative results between FL based MPPT and INC based MPPT. It shows that the FL based MPPT is fast to operate the switch of zeta converter for maintaining the DC voltage level at various operating condition of the solar PV module.
Parameters of the solar PV and its numerical values at 1000 W/m2 insolation
Parameters of the solar PV and its numerical values at 1000 W/m2 insolation
Zeta Converters Parameters for 2.5 kW Solar Energy
Parameters of the BLDC motor
In Fig. 9, transient to steady state condition is presented to understand the suitability of the proposed system whereas the Fig. 10 shows the dynamic condition. The performance of the constitutes part of the proposed model are presented one by one.
In Fig. 7(a-c), the graph between solar current (i pv ) versus voltage (v pv ) and solar power (p pv ) versus v pv indicates the nonlinear characteristics of the solar panel at various solar irradiance like 1000 W/m2, 600 W/m2, and 400 W/m2 respectively. In Table 6, a comparative result is shown under various conditions of the solar irradiance. The results at various solar irradiance of the i pv and maximum solar power (Ppvmax) reduces while the voltage at maximum power (V pvmax ) and open circuit voltage (V oc ) are nearly same. The parameters of designed solar PV array are taken using numerical values of Table 3.
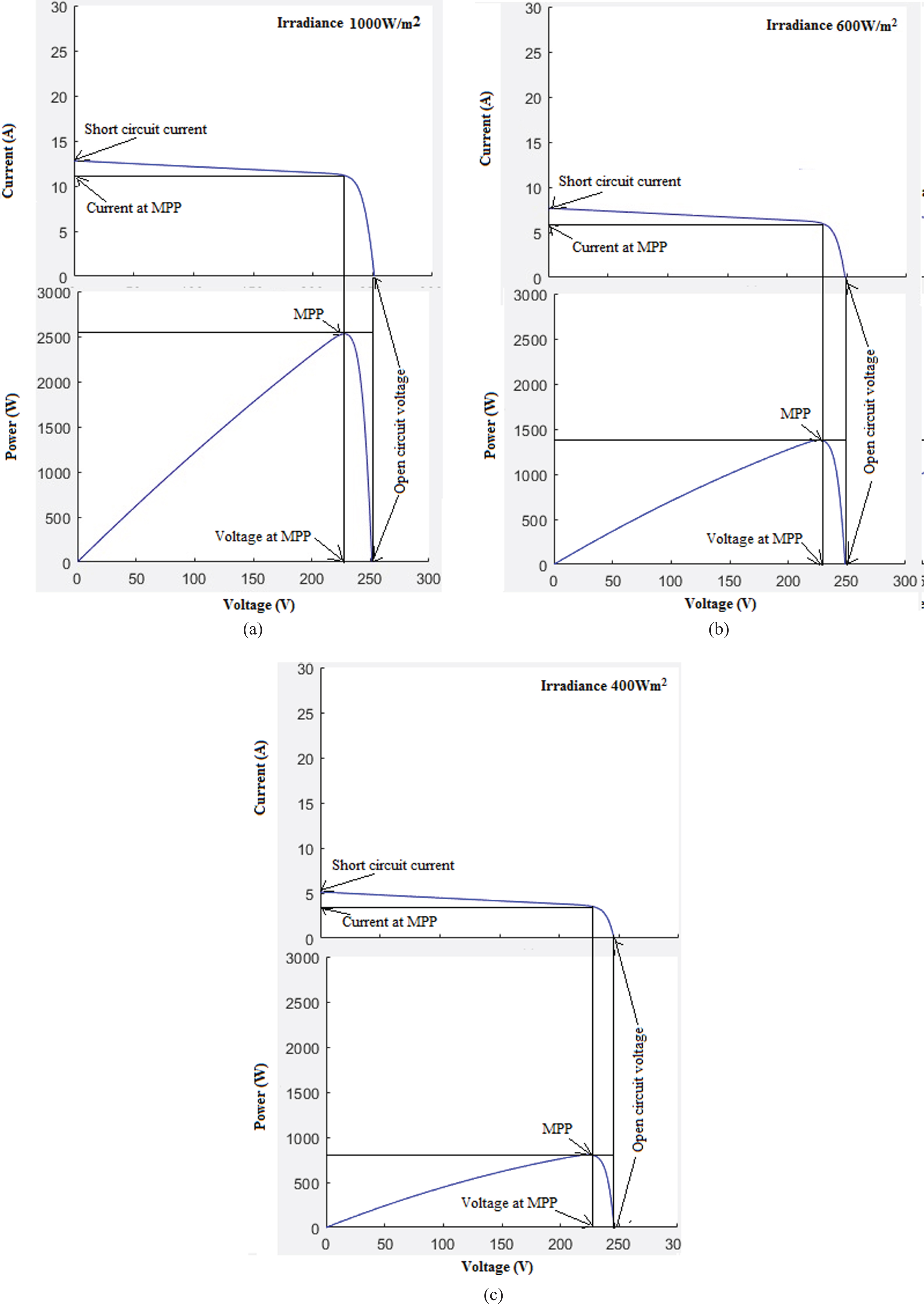
(a-c) Performance of photovoltaic array is shown under various solar irradiance. (a) Current versus voltage and power versus voltage graphs under 1000 W/m2 solar irradiance. (b) Current versus voltage and power versus voltage graphs under 600 W/m2 solar irradiance. (c) Current versus voltage and power versus voltage graphs under 400 W/m2 solar irradiance.
A comparative results of PV model under various conditions of solar irradiance
A compartive results is shown in Fig. 8, where the INC-MPPT and FLC-MPPT are used to generate duty ratio (D) for maintaining output DC voltage. The FLC-MPPT generates D without dely whereas INC-MPPT generates slugisg in nature. Thus FLC-MPPT is the good option to generate pulses for the zeta converter under proposed model. Moreover, a comparactive resuts of the INC-MPPT and FLC-MPPT are given in Table 7. The performance of the FLC-MPPT is evaluated under various conditions of the solar irradiation under dynamic conditions. Resuts is shows in Fig. 8, under transient and steady state condition for 0.0 s to 0.35 s simulation. The comparative resuts shows the FLC-MPPT is the good option to chose against the INC-MPPT.
A comparative results of INC-MPPT and FLC-MPpt
A comparative results of INC-MPPT and FLC-MPpt
A zeta converter behaves as buck-boost converter. Its buck boost nature is an adaptive. The current continous mode (CCM) of opration of zeta converter cuts the stress on electronics components. In Fig. 8, the ouput solar voltage (V pvo ) and duty ratio (D) runs from 0.0 s to 0.35 s for trasient and steady state conditions. The output voltage V pvo gets steady state at 300 V and D gets at.56. However in Fig. 10(b), under dynamic condition model runs from 0.35 s to 0.65 s where solar irradiance varies from 400 W/m2 to 600 W/m2 and then raise to 1000 W/m2. The performance of zeta converter is perfect under various condition of solar irradiance and it maintain the constant voltage Vdco (V) 300 V by controlling the D.
Performance of electronic commutation
The elcetonic commutation is used to provide the gate signal of voltage source inverter (VSI). The commutation input signals is Hall sensor signals. Further the true tables of hall decoder compare with the back emf which is given Table 2. Moreover, the given control algorithm is the close loop current control algorithm. The firing switches Q1-Q6 using the 1200 mode of operation where one switch conducts for 600 degree. The simulation results are given in Figs. 8(b) and 9(c) under steady condtion and under dynamic condition respectively. The three phase stator current of the brushless DC motor shows that the electronic commutation works stisfactoriliy.
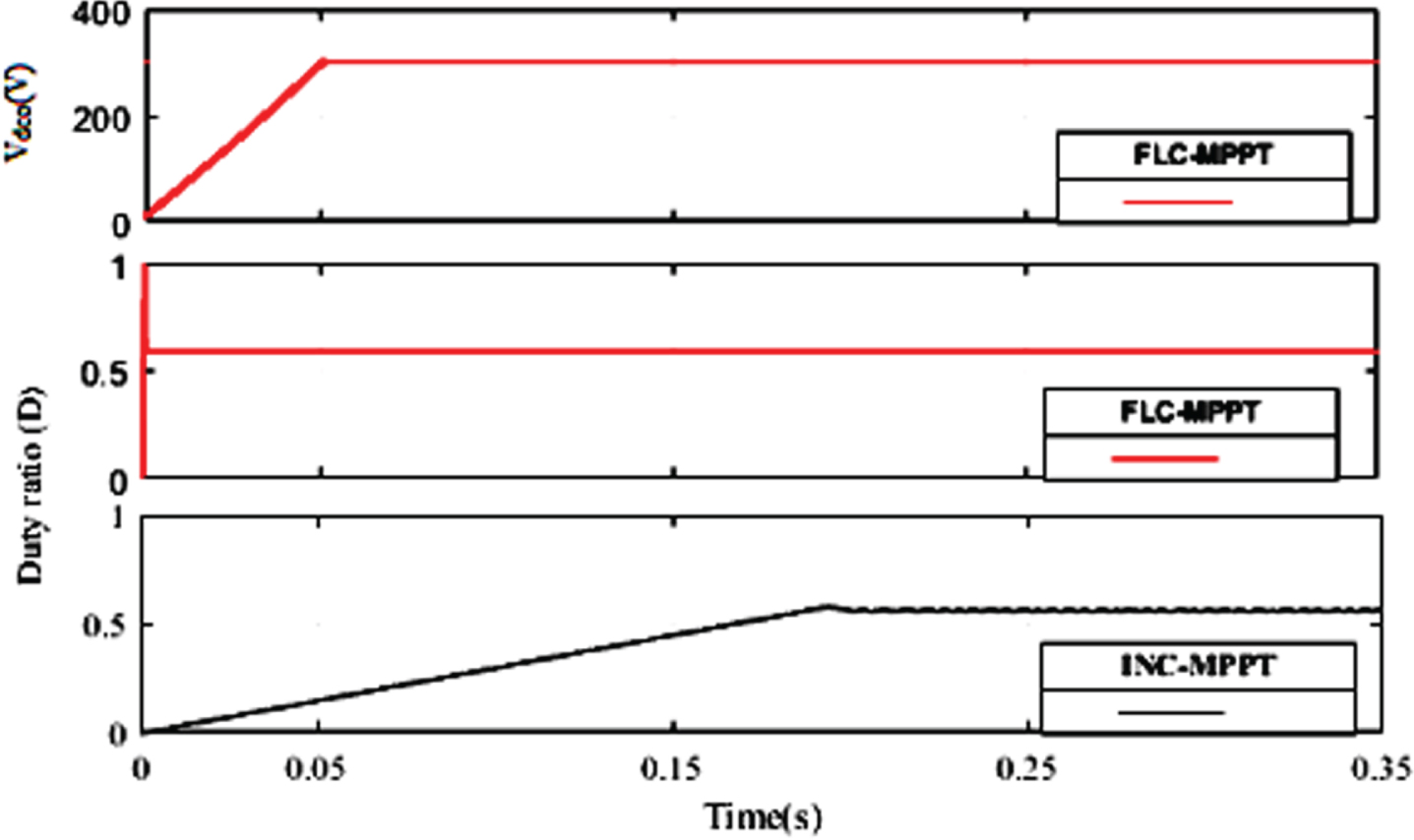
A comparative result of output voltage of zeta conveter (Vdco(V)), duty ratio (D) under fuzy logic based MPPT and incremental conductance based MPPT.
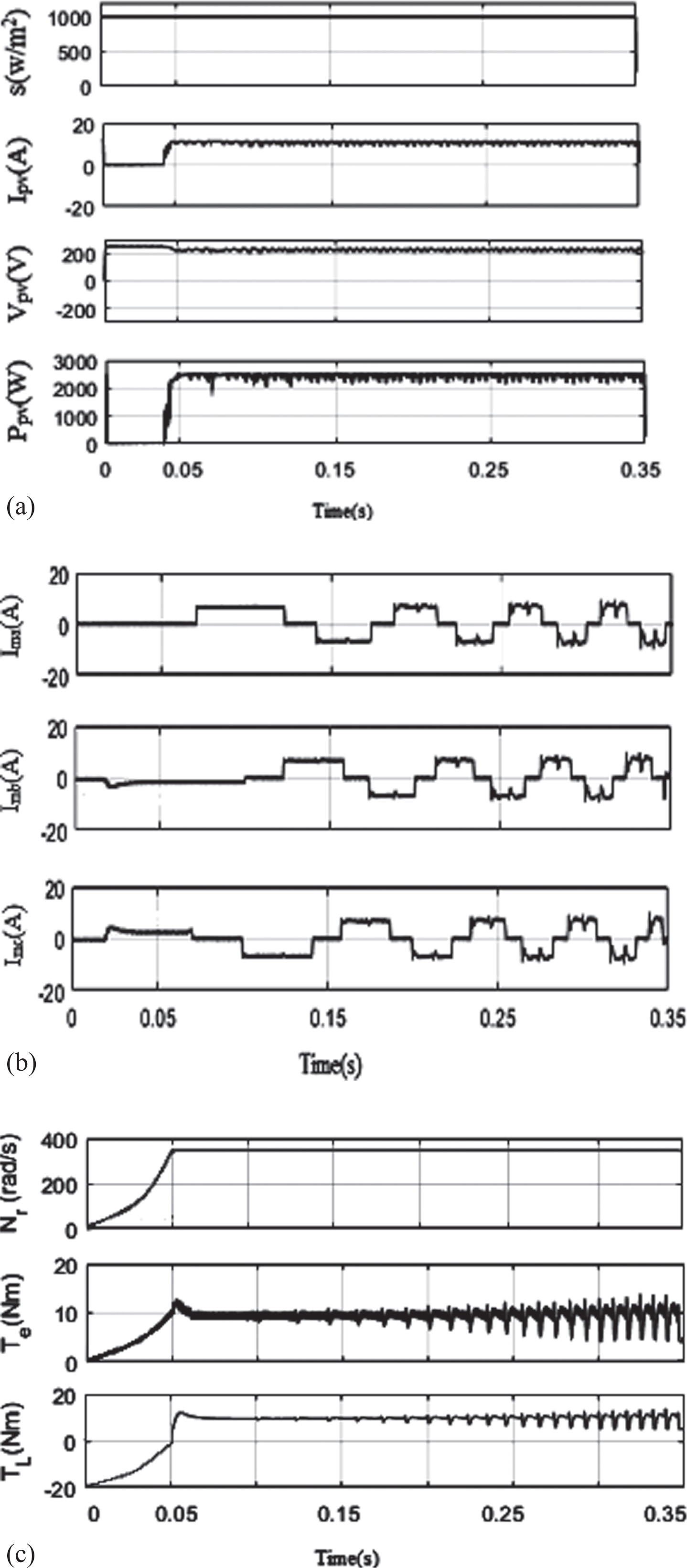
Performance of solar pannel, zeta converter, voltage source inveter and BLDC motor are presented under transient and steady state conditions. (a) Solar irradiance (S(W/m2)) solar current (Ipv (A)), solar voltage (Vpv(V)), solar power (Ppv(W)) under transient and steady state condition. (b) Three phase currents generated by voltage source inverter, phase a current (Iam (A)), phase b current (Ibm (A)) and, phase c current (Icm (A)) under transient and steady state condition. (c) Rotar speed (Nr(rad/s)), load torque (TL(Nm)) and electromagnetic torque (Te(Nm)) under transient and steady state condition.
The water pump performace under transient and steady state conditions is shown in Fig. 10(c), where, a water pump connected with solar PV at 1000 W/m2. The BLDC motor runs at a speed Nr of 172.78 rad/s, load torque TL, electromagnatic torque Te and the stator current im represents satisfactory resuts under transinet and steady state condition. Moreovere under dynamic conditions the resuts is shown in Fig. 10(d) where Nr is changes as solar irradiance changes. Thus all the parameters of the BLDC motors change as solar irradiance change. It indicates the control algorithm of BLDC motor based water pump works satisfactory. Hence, a design of solar PV module based water pump is the good option for treading in market.
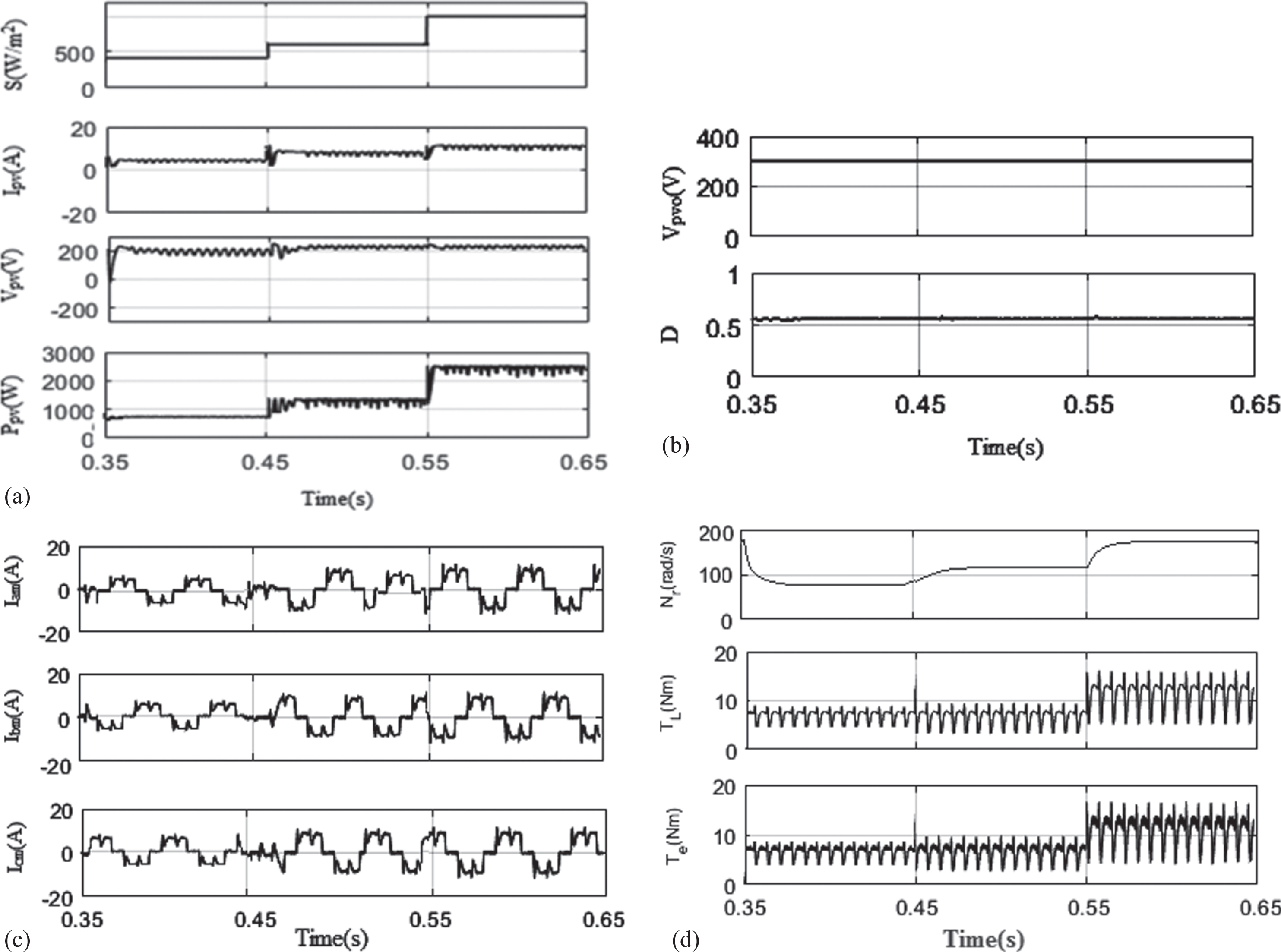
Performance of solar pannel, zeta converter, voltage source inveter and BLDC motor are presented under dynamic conditions. (a) Solar irradiance (S(W/m2)) solar current (Ipv (A)), solar voltage (Vpv(V)), solar power (Ppv(W)) under dynamic condition. (b) Output voltage of zeta conveter (Vdco(V)), duty ratio (D) under dynamic conditions. (c) Three phase currents generated by voltage source inverter, phase a current (Iam (A)), phase b current (Ibm (A)) and, phase c current (Icm (A)) under dynamic condition. (d) Rotar speed (Nr(rad/s)), load torque (TL(Nm)) and electromagnetic torque (Te(Nm)) under dynamic condition.
A comparative performance of FLC-MPPT and INC-MPPT have been evaluated using a MATLAB Simulink model. A combined effect of the proposed model has performed satisfactorily and good. It has been seen that the performance of independent part of the proposed model gives the good results under transient, steady state and dynamic state. The solar irradiance from 1000 W/m2 to 600 W/m2 and 400 W/m2 are varied and seen its good performance. The main advantage of FLC-MPPT is observed that it is fast and smooth response under various conditions of solar irradiance. Thus, proposed control algorithm is a good option in irrigation system using the BLDC motor based water pump. Moreover, it can enhance the trade of presnt market and a positive benefit for farmer. It can play a good role in agriculture.
Footnotes
Acknowledgments
This work supports project of Interdisciplinary Collaboration Research Unit (IDRU) by Ministry of Education Jazan University (No. RUP-4)